
Arm Posture Changes and Influences on Hand Controller Interaction Evaluation in Virtual Reality



Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
2.1. Hand Motion Sensing-Based Interaction and Ergonomical Concerns in VR
2.2. Target Acquisition in VR and Aiding Techniques
2.3. Hand Interaction Performance and Evaluation Methods
3. Hypotheses Development
4. Methods
4.1. Participants
4.2. Apparatus
4.3. Procedure
4.4. Design
4.5. Data Processing and Analysis
5. Results
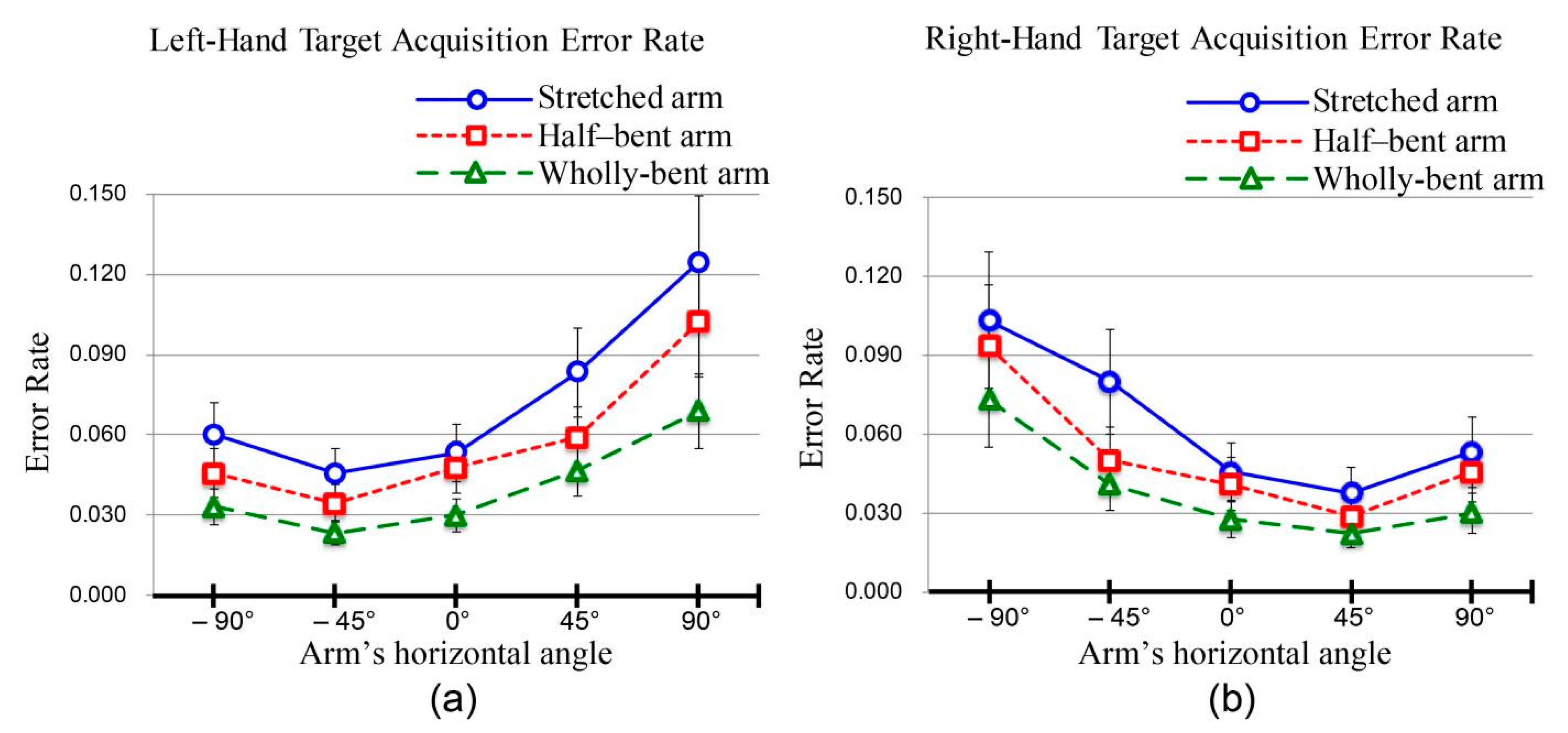
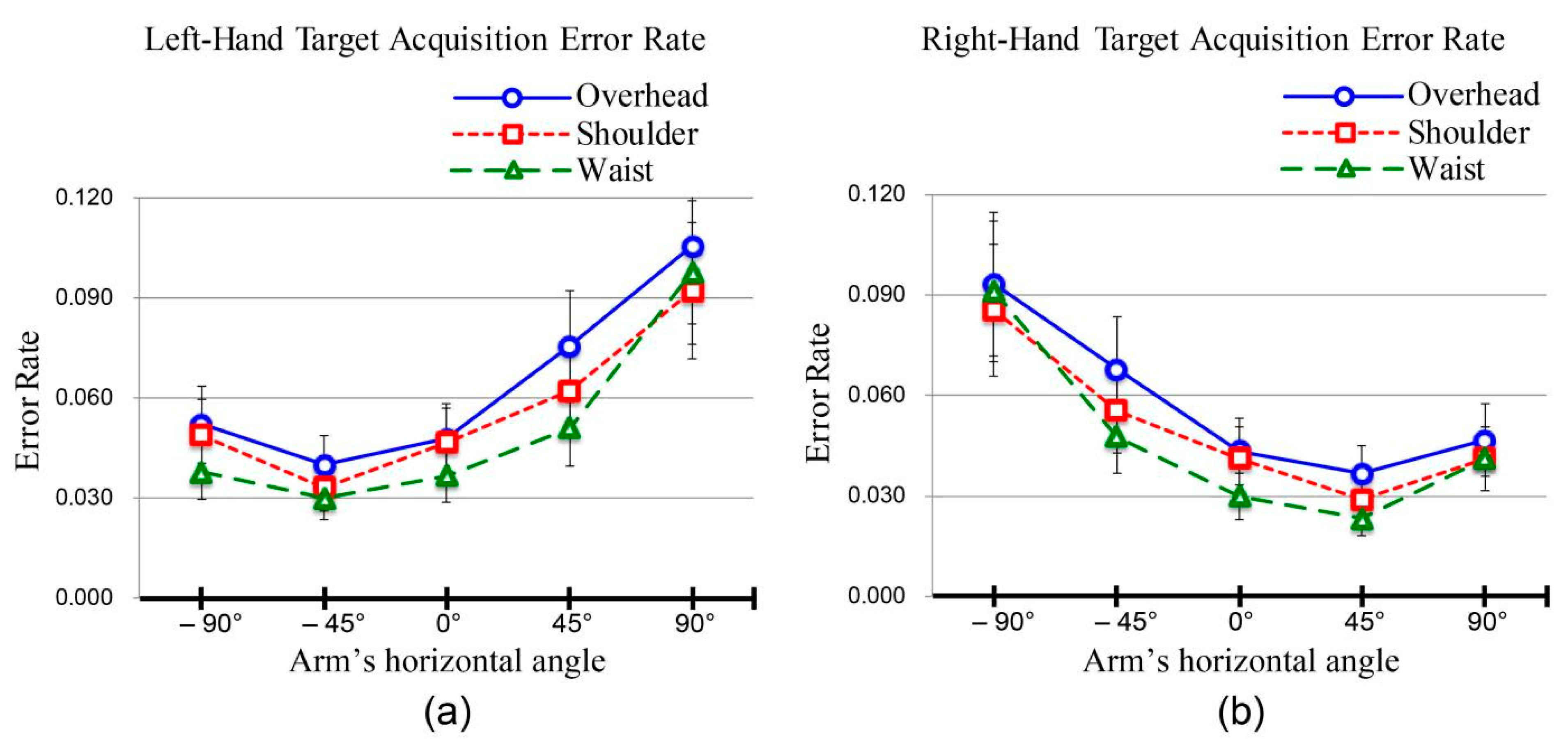
5.1. Target Acquisition Error Rate
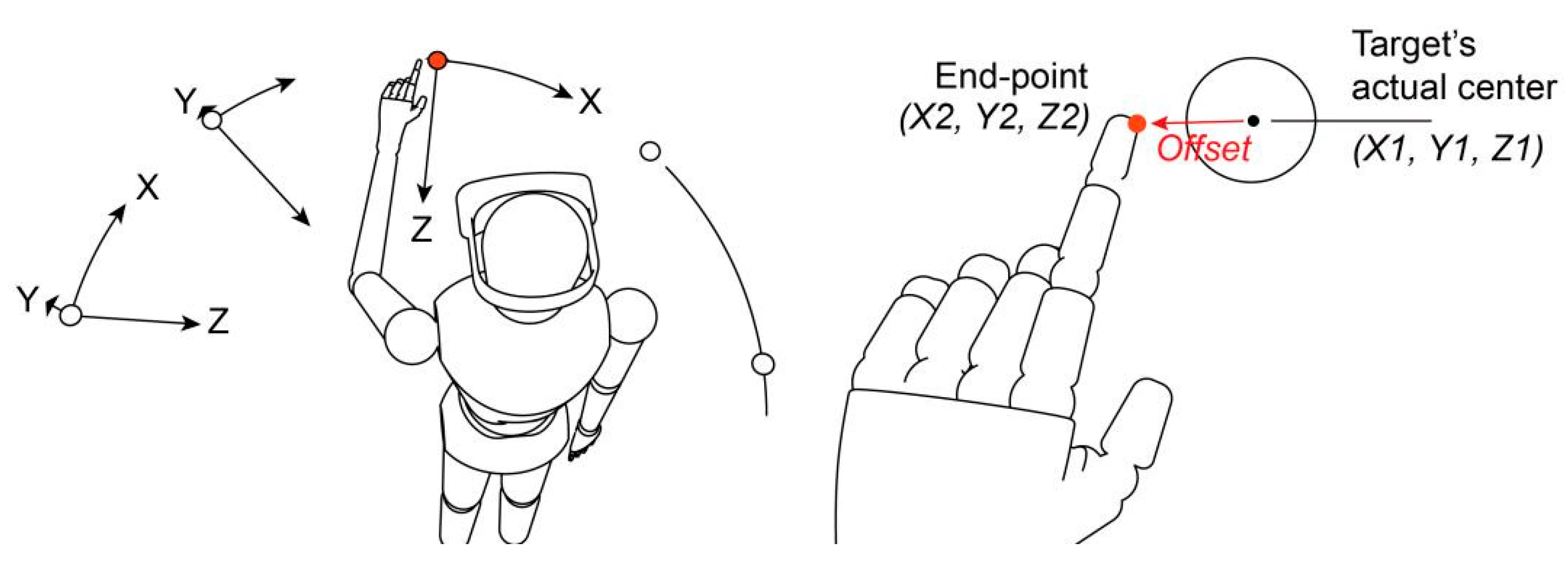
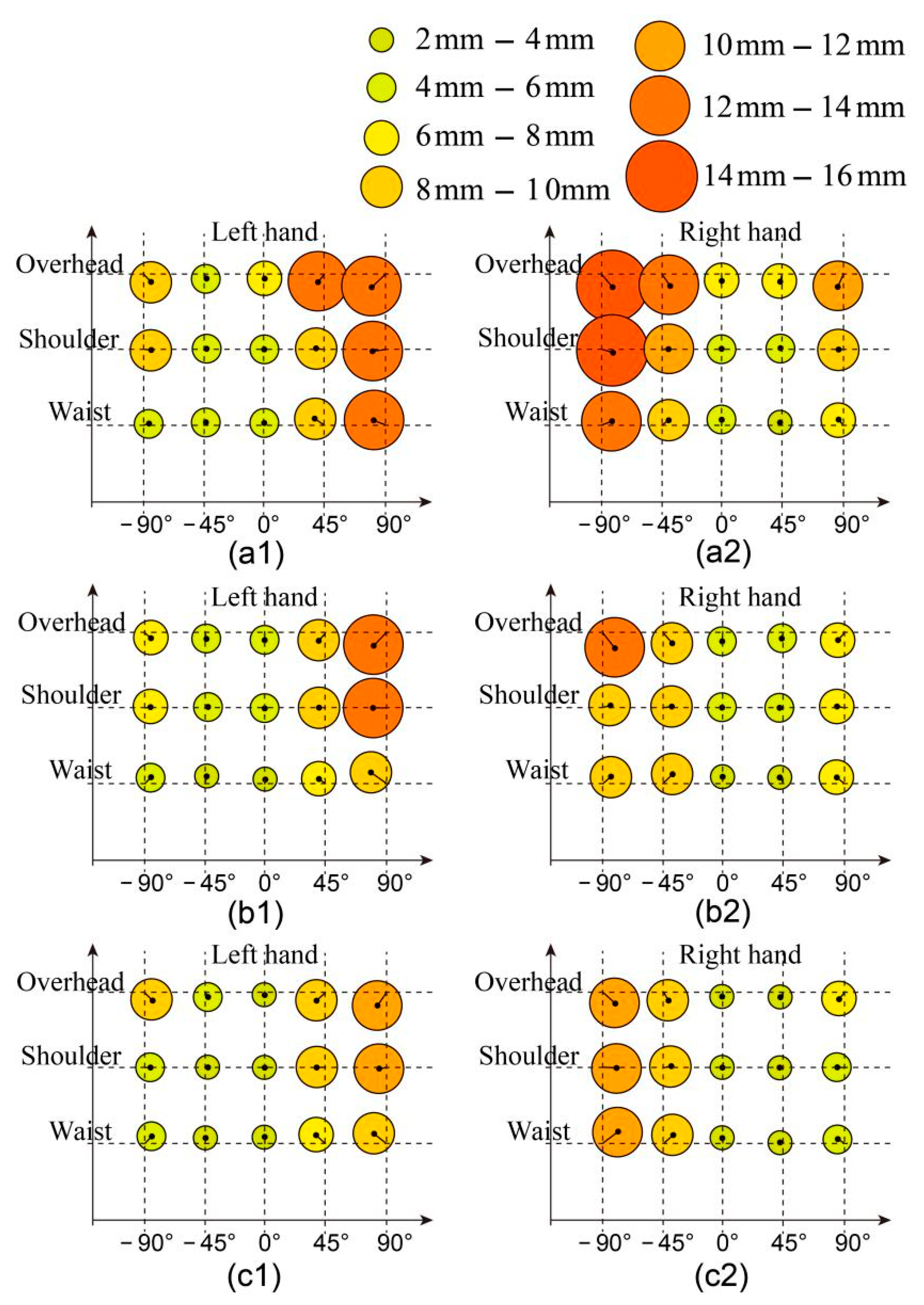
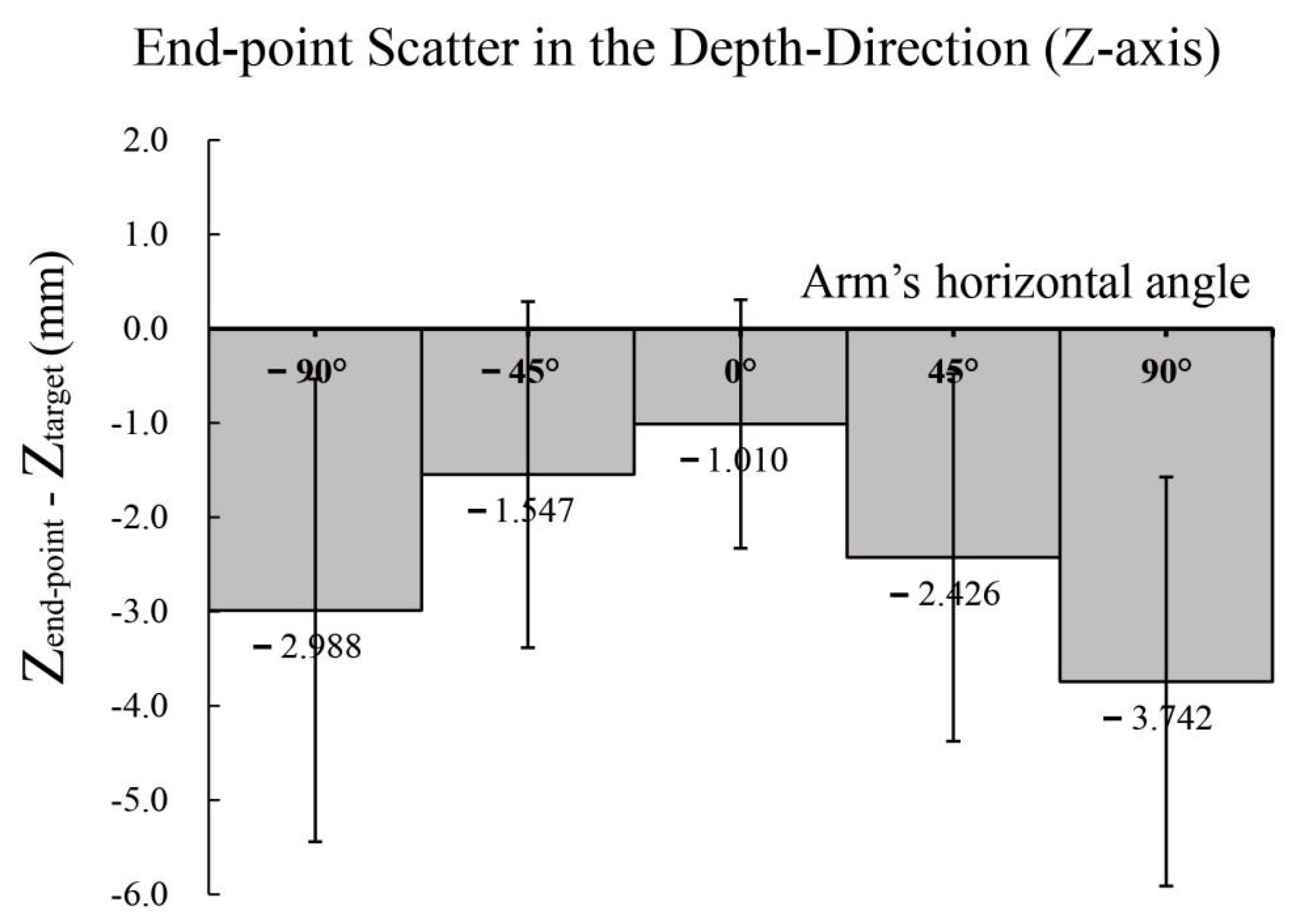
5.2. End-Point Scatter
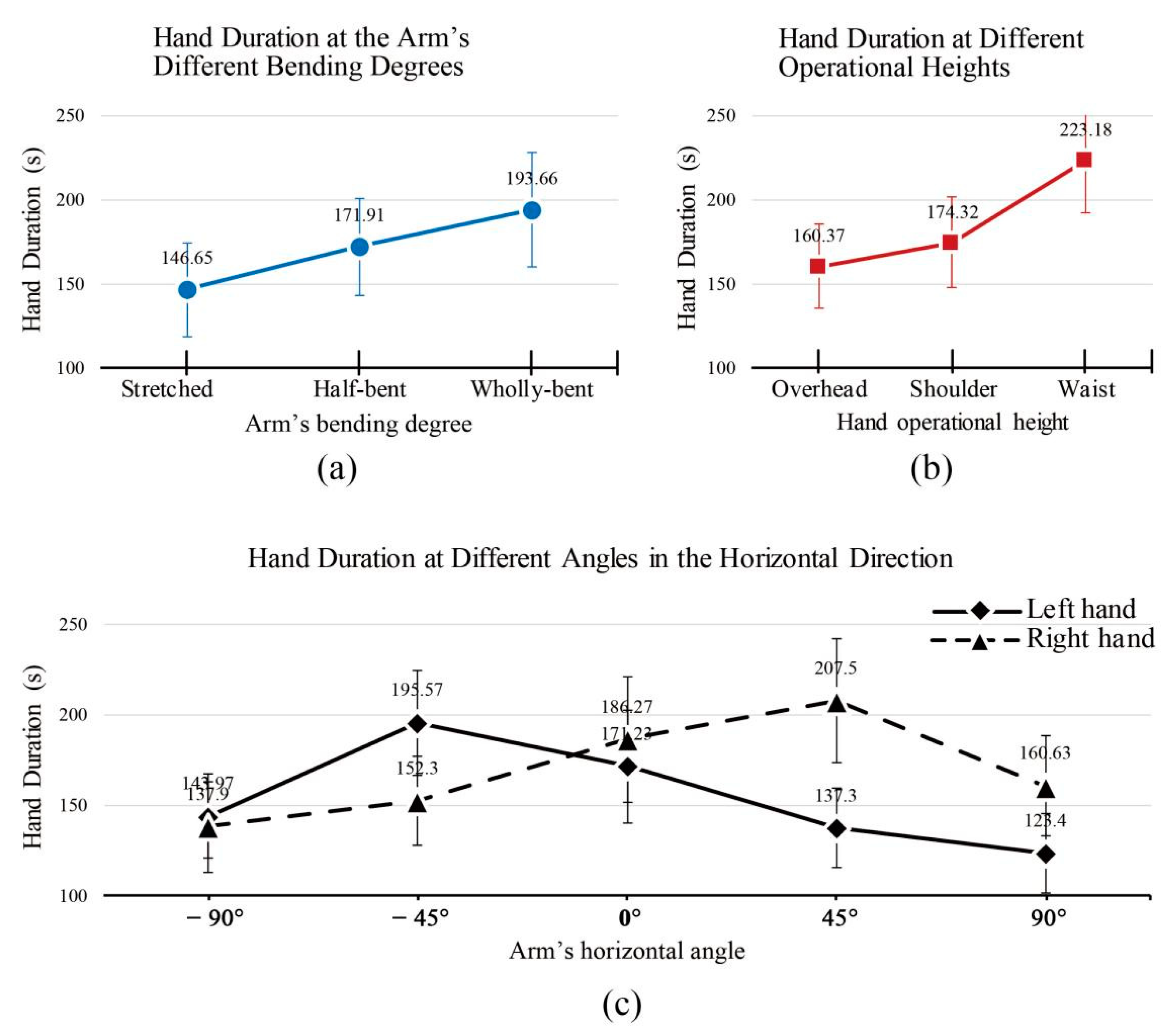
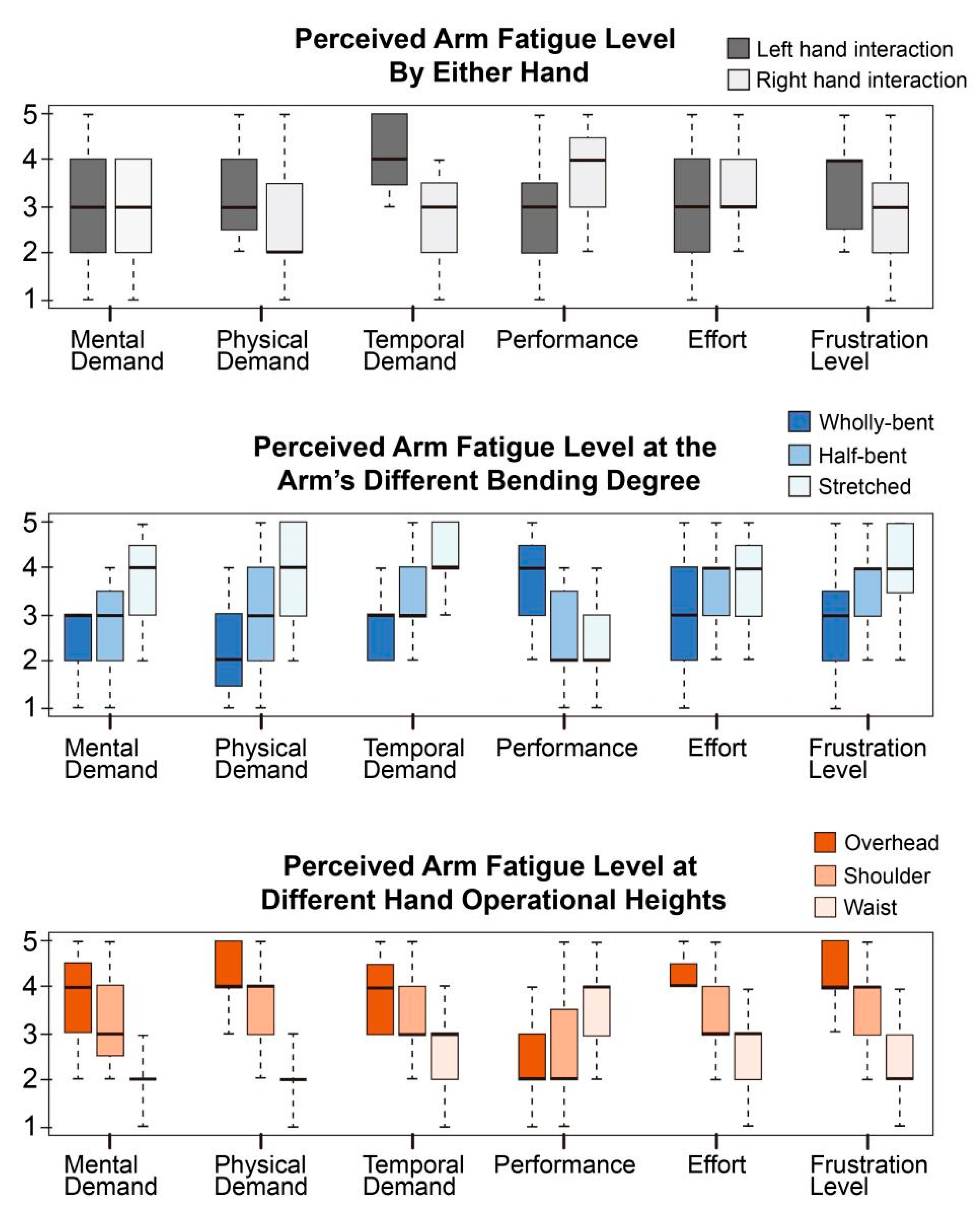
5.3. Hand Operation Persistence and Perceived Arm Fatigue Assessment
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Assessment Metric | Explanatory Statement (Rated on a 5-Point Likert Scale) |
|---|---|
| Mental demand | How mentally demanding was the interaction task you completed? |
| Physical demand | How physically demanding was the interaction task you completed? |
| Temporal demand | How suffering and hard was the pace of the interaction task you completed? |
| Performance | How successful were you in completing the interaction task? |
| Effort | How hard did you have to work to accomplish your level of performance? |
| Frustration | How insecure, discouraged, irritated, stressed, and annoyed were you? |
References
- Mirelman, A.; Patritti, B.L.; Bonato, P.; Deutsch, J.E. Effects of virtual reality training on gait biomechanics of individuals post-stroke. Gait Posture 2010, 31, 433–437. [Google Scholar] [CrossRef] [PubMed]
- Zyda, M. From Visual Simulation to Virtual Reality to Games. Computer 2005, 38, 25–32. [Google Scholar] [CrossRef]
- Pan, Z.; Cheok, A.D.; Yang, H.; Zhu, J.; Shi, J. Virtual reality and mixed reality for virtual learning environments. Comput. Graph. 2006, 30, 20–28. [Google Scholar] [CrossRef]
- Keil, J.; Edler, D.; O’Meara, D.; Korte, A.; Dickmann, F. Effects of Virtual Reality Locomotion Techniques on Distance Estimations. ISPRS Int. J. Geo-Inf. 2021, 10, 150. [Google Scholar] [CrossRef]
- Bonali, F.L.; Russo, E.; Vitello, F.; Antoniou, V.; Marchese, F.; Fallati, L.; Bracchi, V.; Corti, N.; Savini, A.; Whitworth, M.; et al. How Academics and the Public Experienced Immersive Virtual Reality for Geo-Education. Geosciences 2022, 12, 9. [Google Scholar] [CrossRef]
- Latif, S.; Tarner, H.; Beck, F. Talking Realities: Audio Guides in Virtual Reality Visualizations. IEEE Comput. Graph. Appl. 2022, 42, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Paszkiel, S. Using BCI and VR technology in Neurogaming. In Analysis and Classification of EEG Signals for Brain–Computer Interfaces; Springer: Berlin/Heidelberg, Germany, 2020; Volume 852, pp. 93–99. [Google Scholar] [CrossRef]
- Argelaguet, F.; Andujar, C. Special Section on touching the 3rd Dimension: A survey of 3D object selection techniques for virtual environments. Comput. Graph. 2013, 37, 121–136. [Google Scholar] [CrossRef] [Green Version]
- Vogel, D.; Balakrishnan, R. Distant freehand pointing and clicking on very large, high resolution displays. In Proceedings of the 18th Annual ACM Symposium on User Interface Software and Technology, Seattle, WA, USA, 23–26 October 2005; pp. 33–42. [Google Scholar] [CrossRef] [Green Version]
- Grelsamer, R.P.; Weinstein, C.H. Applied biomechanics of the patella. Clin. Orthop. Relat. Res. 2001, 389, 9–14. [Google Scholar] [CrossRef] [PubMed]
- Balakrishnan, R.; Mackenzie, I.S. Performance Differences in the Fingers, Wrist, and Forearm in Computer Input Control. In Proceedings of the CHI ’97: ACM Conference on Human Factors & Computing Systems, Atlanta Georgia, GA, USA, 22–27 March 1997; pp. 303–310. [Google Scholar] [CrossRef] [Green Version]
- Sanders, M.S.; McCormick, E.J. Human Factors in Engineering and Design. Ind. Robot 1998, 25, 153. [Google Scholar] [CrossRef]
- Tanii, K.; Kogi, K.; Sadoyama, T. Spontaneous alternation of the working arm in static overhead work. J. Hum. Ergol. 1972, 1, 143–155. [Google Scholar] [CrossRef]
- Hincapié-Ramos, J.D.; Guo, X.; Moghadasian, P.; Irani, P. Consumed endurance: A metric to quantify arm fatigue of mid-air interactions. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 1063–1072. [Google Scholar] [CrossRef]
- Fikkert, F.W. Gesture Interaction at a Distance. Ph.D. Thesis, University of Twente, Enschede, The Netherlands, 2010. [Google Scholar] [CrossRef] [Green Version]
- Haque, F.; Nancel, M.; Vogel, D. Myopoint: Pointing and Clicking Using Forearm Mounted Electromyography and Inertial Motion Sensors. In Proceedings of the 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Korea, 18–23 April 2015; pp. 3653–3656. [Google Scholar] [CrossRef] [Green Version]
- Mine, M.R.; Brooks, F.B.; Sequin, C.H. Moving objects in space: Exploiting proprioception in virtual-environment interaction. In Proceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, Los Angeles, LA, USA, 3–8 August 1997; pp. 19–26. [Google Scholar] [CrossRef]
- Lemmerman, D.K.; LaViola, J.J. Effects of Interaction-Display Offset on User Performance in Surround Screen Virtual Environments. In Proceedings of the IEEE Virtual Reality 2007, Charlotte, NC, USA, 10–14 March 2007; pp. 303–304. [Google Scholar] [CrossRef]
- Boring, S.; Jurmu, M.; Butz, A. Scroll, tilt or move it: Using mobile phones to continuously control pointers on large public displays. In Proceedings of the 21st Annual Conference of the Australian Computer-Human Interaction Special Interest Group: Design, Melbourne, Australia, 23–27 November 2009; pp. 161–168. [Google Scholar] [CrossRef]
- Harrison, C.; Ramamurthy, S.; Hudson, S.E. On-body interaction: Armed and dangerous. In Proceedings of the 6th International Conference on Tangible, Embedded and Embodied Interaction, Kingston, ON, Canada, 19–22 February 2012; pp. 69–76. [Google Scholar] [CrossRef]
- Lou, X.; Peng, R.; Hansen, P.; Li, X. Effects of User’s Hand Orientation and Spatial Movements on Free Hand Interactions with Large Displays. Int. J. Hum.-Comput. Interact. 2018, 34, 519–532. [Google Scholar] [CrossRef]
- Lou, X.; Li, X.; Peng, R.; Hansen, P. Optimising Free Hand Selection in Large Displays by Adapting to User’s Physical Movements. In Proceedings of the 2016 ACM Symposium on Spatial User Interaction, Tokyo, Japan, 15–16 October 2016; pp. 23–31. [Google Scholar] [CrossRef]
- Poupyrev, I.; Billinghurst, M.; Weghorst, S. The Go-Go Interaction Technique: Non-linear Mapping for Direct Manipulation in VR. In Proceedings of the 9th Annual ACM Symposium on User Interface Software and Technology, Seattle, WA, USA, 6–8 November 1996; pp. 79–80. [Google Scholar] [CrossRef]
- Jung, W.; Cho, W.; Kim, H.; Woo, W. BoostHand: Distance-free Object Manipulation System with Switchable Non-linear Mapping for Augmented Reality Classrooms. In Proceedings of the 2017 IEEE International Symposium on Mixed and Augmented Reality, Nantes, France, 9–13 October 2017; pp. 321–325. [Google Scholar] [CrossRef]
- Ens, B.M.; Finnegan, R.; Irani, P.P. The Personal Cockpit: A Spatial Interface for Effective Task Switching on Head-Worn Displays. In Proceedings of the CHI’14: ACM Conference on Human Factors & Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; pp. 3171–3180. [Google Scholar] [CrossRef]
- Gerber, D.; Bechmann, D. The spin menu: A menu system for virtual environments. In Proceedings of the IEEE Conference on Virtual Reality, Bonn, Germany, 12–16 March 2005; pp. 271–272. [Google Scholar] [CrossRef]
- Mäkelä, V.; Heimonen, T.; Turunen, M. Magnetic Cursor: Improving Target Selection in Freehand Pointing Interfaces. In Proceedings of the International Symposium on Pervasive Displays, Copenhagen, Denmark, 3–4 June 2014; pp. 112–117. [Google Scholar] [CrossRef]
- Lou, X.; Li, X.; Hansen, P.; Du, P. Hand-Adaptive User Interface: Improved Gestural Interaction in Virtual Reality. Virtual Real. 2020, 25, 367–382. [Google Scholar] [CrossRef]
- Cournia, N.; Smith, J.D.; Duchowski, A.T. Gaze- vs. hand-based pointing in virtual environments. In Proceedings of the CHI 03 Extended Abstracts on Human Factors in Computing Systems, Fort Lauderdale, FL, USA, 5–10 April 2003. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.A.; Schwarz, J.; Harrison, C.; Mankoff, J.; Hudson, S. Around-body interaction: Sensing & interaction techniques for proprioception-enhanced input with mobile devices. In Proceedings of the International Conference on Human-Computer Interaction with Mobile Devices & Services, Toronto, ON, Canada, 24–27 September 2014; pp. 287–290. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, C.; Ma, X.; Huang, S.; Iqbal, H.; Shi, Y. Eyes-Free Target Acquisition in Interaction Space around the Body for Virtual Reality. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montréal, QC, Canada, 21–26 April 2018; pp. 1–13. [Google Scholar] [CrossRef]
- Cockburn, A.; Quinn, P.; Gutwin, C.; Ramos, G.; Looser, J. Air pointing: Design and evaluation of spatial target acquisition with and without visual feedback. Int. J. Hum.-Comput. Stud. 2011, 69, 401–414. [Google Scholar] [CrossRef]
- Wang, Y.; MacKenzie, C. Effects of orientation disparity between haptic and graphic displays of objects in virtual environments. In Proceedings of the INTERACT’99, Edinburgh, UK, 30 August–3 September 1999; pp. 391–398. [Google Scholar]
- Lubos, P.; Bruder, G.; Steinicke, F. Analysis of direct selection in head-mounted display environments. In Proceedings of the IEEE Symposium on 3D User Interfaces, Minneapolis, MN, USA, 29–30 March 2014. [Google Scholar] [CrossRef]
- Lubos, P.; Bruder, G.; Ariza, O.; Steinicke, F. Touching the Sphere: Leveraging Joint-Centered Kinespheres for Spatial User Interaction. In Proceedings of the 2016 Symposium on Spatial User Interaction, Tokyo, Japan, 15–16 October 2016; pp. 13–22. [Google Scholar] [CrossRef]
- Fitts, P.M. The information capacity of the human motor system in controlling the amplitude of movement. J. Exp. Psychol. 1954, 121, 381–391. [Google Scholar] [CrossRef] [Green Version]
- Soukoreff, R.W.; Mackenzie, I.S. Towards a standard for pointing device evaluation, perspectives on 27 years of Fitts’ law research in HCI. Int. J. Hum.-Comput. Stud. 2014, 61, 751–789. [Google Scholar] [CrossRef]
- Previc, F.H. Functional specialization in the lower and upper visual fields in humans: Its ecological origins and neurophysiological implications. Behav. Brain Sci. 1990, 13, 519–542. [Google Scholar] [CrossRef]
- Danckert, J.; Goodale, M.A. Superior performance for visually guided pointing in the lower visual field. Exp. Brain Res. 2001, 137, 303–308. [Google Scholar] [CrossRef] [PubMed]
- Po, B.A.; Fisher, B.D.; Booth, K.S. Mouse and touchscreen selection in the upper and lower visual fields. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Vienna, Austria, 24–29 April 2004; pp. 359–366. [Google Scholar] [CrossRef] [Green Version]
- Oldfield, R.C. The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia 1971, 9, 97–113. [Google Scholar] [CrossRef]
- Harts, G. Development of NASA-TLX (task load index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar]
- Holmes, N.P.; Spence, C. The body schema and the multisensory representation(s) of peripersonal space. Cogn. Process. 2004, 5, 94–105. [Google Scholar] [CrossRef] [PubMed] [Green Version]











| Independent Variables | |
|---|---|
| 1. Hand-use choice | Left; Right; |
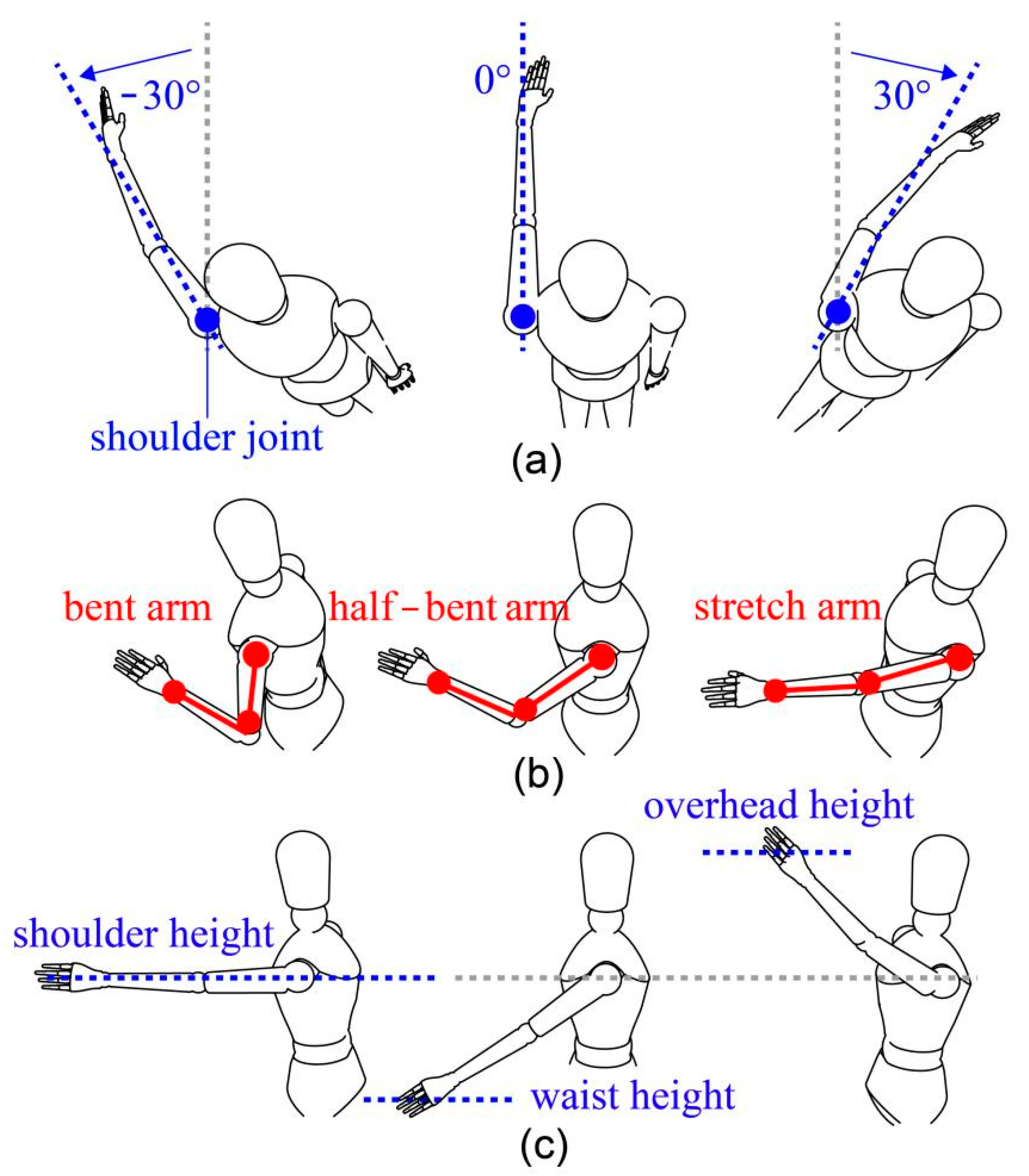
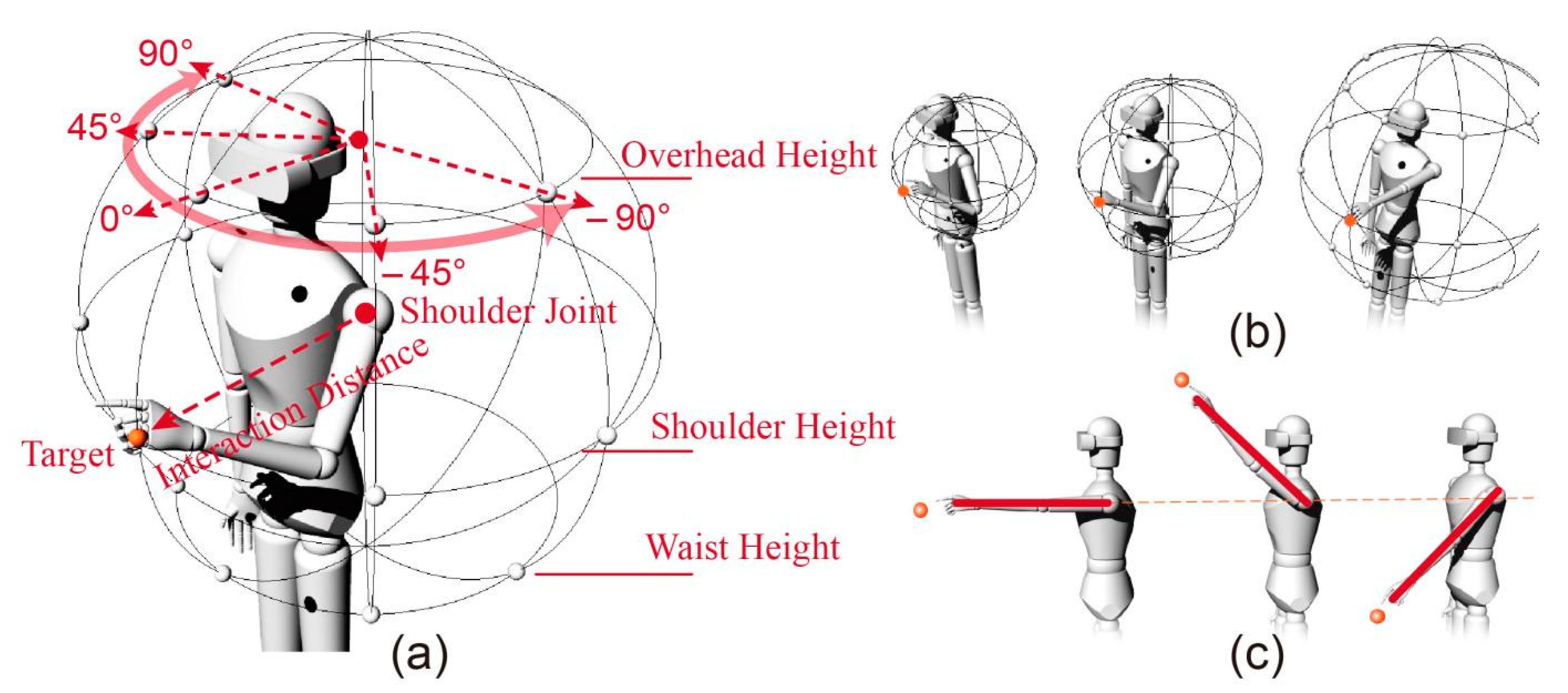
| 2. Arm-bending degree: interaction distance | Wholly-bent: 30 cm; Half-bent: 45 cm; Stretched: 60 cm; |
| 3. Hand-operational position | Horizontal angles (5): −90°, −45°, 0°, 45°, 90°; Vertical heights (3): overhead, shoulder, waist; |
| Hand Use Choice | Arm-Bending Degree | Hand-Operational Height | Acquisition Error Rate at Horizontal Angles | ||||
|---|---|---|---|---|---|---|---|
| −90° | −45° | 0° | 45° | 90° | |||
| Left hand | Stretched | Overhead | 0.063 | 0.053 | 0.060 | 0.100 | 0.130 |
| Shoulder | 0.067 | 0.043 | 0.057 | 0.083 | 0.117 | ||
| Waist | 0.050 | 0.040 | 0.043 | 0.067 | 0.127 | ||
| Half-bent | Overhead | 0.053 | 0.040 | 0.050 | 0.073 | 0.113 | |
| Shoulder | 0.047 | 0.033 | 0.053 | 0.057 | 0.090 | ||
| Waist | 0.037 | 0.030 | 0.040 | 0.047 | 0.103 | ||
| Wholly-bent | Overhead | 0.040 | 0.027 | 0.033 | 0.053 | 0.073 | |
| Shoulder | 0.033 | 0.023 | 0.030 | 0.047 | 0.070 | ||
| Waist | 0.027 | 0.020 | 0.027 | 0.040 | 0.063 | ||
| Right hand | Stretched | Overhead | 0.110 | 0.093 | 0.053 | 0.050 | 0.057 |
| Shoulder | 0.107 | 0.080 | 0.050 | 0.033 | 0.053 | ||
| Waist | 0.093 | 0.067 | 0.033 | 0.030 | 0.050 | ||
| Half-bent | Overhead | 0.100 | 0.063 | 0.047 | 0.037 | 0.050 | |
| Shoulder | 0.083 | 0.047 | 0.047 | 0.027 | 0.040 | ||
| Waist | 0.097 | 0.040 | 0.030 | 0.023 | 0.047 | ||
| Wholly-bent | Overhead | 0.070 | 0.047 | 0.030 | 0.023 | 0.033 | |
| Shoulder | 0.067 | 0.040 | 0.027 | 0.027 | 0.030 | ||
| Waist | 0.083 | 0.037 | 0.027 | 0.017 | 0.027 | ||
| Arm-Bending Degree | Mean Error Rate | Std. Dev. | Post-Hoc Pairwise Comparisons |
| Stretched | 0.069 | 0.013 | Stretch—Half-bent: p < 0.05, Cohen’s d = 1.12 |
| Half-bent | 0.055 | 0.011 | Stretch—Wholly-bent: p < 0.05, Cohen’s d = 2.38 |
| Wholly-bent | 0.040 | 0.009 | Half-bent—Wholly-bent: p < 0.05, Cohen’s d = 1.48 |
| Hand-Operational Height | Mean Error Rate | Std. Dev. | Post-Hoc Pairwise Comparisons |
| Overhead | 0.061 | 0.011 | Overhead—Shoulder: p < 0.05, Cohen’s d = 0.64 |
| Shoulder | 0.054 | 0.010 | Overhead—Waist: p < 0.05, Cohen’s d = 1.04 |
| Waist | 0.049 | 0.012 | Shoulder—Waist: p < 0.05, Cohen’s d = 0.45 |
| Hand-Use Choice | Mean | Std. Dev. | F-Value | p-Value | Post-Hoc Pairwise Comparison(s) | |
| Left hand | 7.25 mm | 2.31 | F(1, 291) = 1.68 | =0.137 | - | |
| Right hand | 7.06 mm | 2.26 | ||||
| Arm’s Bending Degree | Mean | Std. Dev. | F-Value | p-Value | Post-Hoc Pairwise Comparison(s) | |
| Stretched | 8.41 mm | 2.19 | F(2, 582) = 8.97 | <0.05 | Stretched—Half-bent: p < 0.05, Cohen’s d = 0.54 | |
| Half-bent | 7.21 mm | 2.23 | Stretched—Wholly-bent: p < 0.05, Cohen’s d = 0.91 | |||
| Wholly-bent | 6.42 mm | 2.16 | Half-bent—Wholly-bent: p < 0.05, Cohen’s d = 0.36 | |||
| Operational Height | Mean | Std. Dev. | F-Value | p-Value | Post-Hoc Pairwise Comparison(s) | |
| Overhead | 8.38 mm | 2.43 | F(2, 582) = 25.48 | < 0.05 | Overhead—Shoulder: p < 0.05, Cohen’s d = 0.37 | |
| Shoulder | 7.50 mm | 2.29 | Overhead—Waist: p < 0.05, Cohen’s d = 0.97 | |||
| Waist | 6.15 mm | 2.14 | Shoulder—Waist: p < 0.05, Cohen’s d = 0.61 | |||
| Horizontal Angle(s) | Mean | Std. Dev. | F-Value | p-Value | Post-Hoc Pairwise Comparison(s) | |
| Left side | −90°, −45° | 8.33 mm | 2.49 | F(2, 582) = 207.16 | <0.05 | Left—Middle: p < 0.05, Cohen’s d = 2.09 |
| Middle | 0° | 4.04 mm | 1.48 | Left—Right: p = 0.84, Cohen’s d = 0.12 | ||
| Right side | 45°, 90° | 8.02 mm | 2.71 | Middle—Right: p < 0.05, Cohen’s d = −1.82 | ||
| Hand-Use Choice × Horizontal Angle(s) | Mean | Std. Dev. | F-Value | p-Value | Post-Hoc Pairwise Comparison(s) | |
| Left hand × left side | 5.51 mm | 1.72 | F(1, 291) = 51.14 | <0.05 | Left side—Right side: p < 0.05, Cohen’s d = −1.81 | |
| Left hand × right side | 10.63 mm | 3.61 | ||||
| Right hand × left side | 11.14 mm | 3.26 | Left side—Right side: p < 0.05, Cohen’s d = 2.18 | |||
| Right hand × right side | 5.40 mm | 1.81 | ||||
| Hand-Use Choice | Arm-Bending Degree | Mean Duration Time (in Seconds), Std. Dev. | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Hand-Operational Height | Horizontal Angle | ||||||||
| Overhead | Shoulder | Waist | −90° | −45° | 0° | 45° | 90° | ||
| Left hand | Wholly-bent | 175.4, | 191.7, | 233.6, | 146.4, | 226.1, | 196.6, | 160.1, | 141.3, |
| 27.92 | 30.61 | 37.94 | 23.35 | 36.43 | 37.72 | 25.64 | 22.48 | ||
| Half-bent | 150.2, | 163.0, | 216.2, | 155.2, | 189.9, | 174.6, | 132.2, | 127.7, | |
| 23.77 | 28.87 | 33.27 | 26.62 | 23.48 | 30.02 | 22.23 | 23.82 | ||
| Stretched | 127.3, | 135.3, | 188.4, | 130.3, | 170.7, | 142.5, | 119.6, | 101.2, | |
| 20.48 | 25.49 | 27.63 | 19.49 | 26.77 | 25.31 | 17.72 | 20.22 | ||
| Right hand | Wholly-bent | 202.2, | 215.0, | 258.2, | 157.4, | 177.4, | 213.9, | 238.4, | 164.8, |
| 32.23 | 37.48 | 37.78 | 30.46 | 30.82 | 41.22 | 43.37 | 29.21 | ||
| Half-bent | 167.3, | 188.5, | 234.1, | 140.8, | 148.7, | 186.4, | 202.5, | 173.2, | |
| 30.45 | 30.69 | 30.34 | 24.66 | 23.39 | 33.14 | 30.43 | 30.33 | ||
| Stretched | 139.8, | 152.4, | 208.6, | 115.5, | 130.8, | 158.5, | 181.6, | 143.9, | |
| 25.77 | 27.41 | 30.12 | 20.02 | 19.24 | 28.91 | 28.35 | 22.75 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lou, X.; Zhao, Q.; Shi, Y.; Hansen, P. Arm Posture Changes and Influences on Hand Controller Interaction Evaluation in Virtual Reality. Appl. Sci. 2022, 12, 2585. https://doi.org/10.3390/app12052585
Lou X, Zhao Q, Shi Y, Hansen P. Arm Posture Changes and Influences on Hand Controller Interaction Evaluation in Virtual Reality. Applied Sciences. 2022; 12(5):2585. https://doi.org/10.3390/app12052585
Chicago/Turabian StyleLou, Xiaolong, Qinping Zhao, Yan Shi, and Preben Hansen. 2022. "Arm Posture Changes and Influences on Hand Controller Interaction Evaluation in Virtual Reality" Applied Sciences 12, no. 5: 2585. https://doi.org/10.3390/app12052585
APA StyleLou, X., Zhao, Q., Shi, Y., & Hansen, P. (2022). Arm Posture Changes and Influences on Hand Controller Interaction Evaluation in Virtual Reality. Applied Sciences, 12(5), 2585. https://doi.org/10.3390/app12052585