
Image Mosaicing Applied on UAVs Survey

 , , and
, , and 
Abstract
:1. Introduction
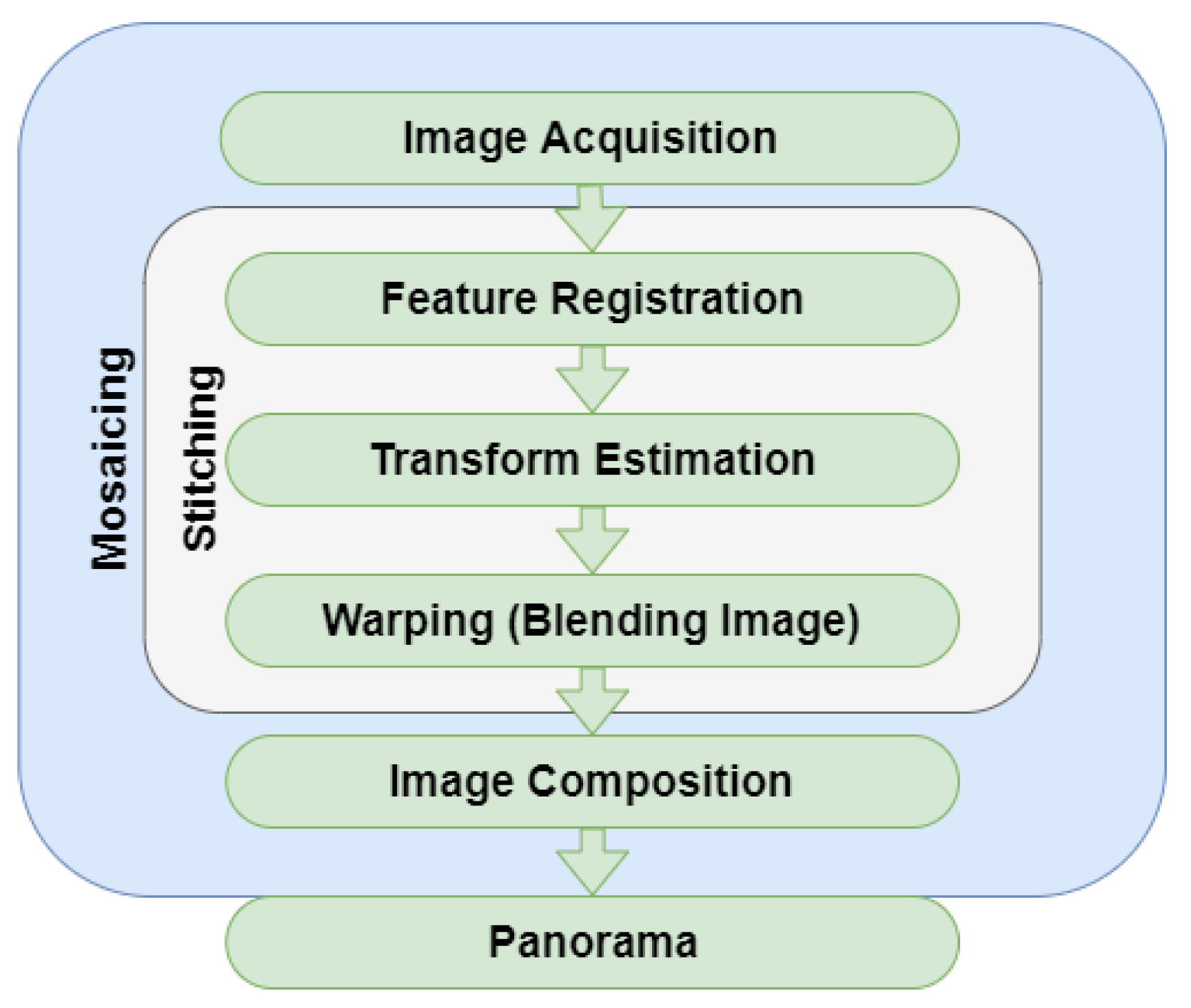
2. Panorama Generation
3. Stitching Methods
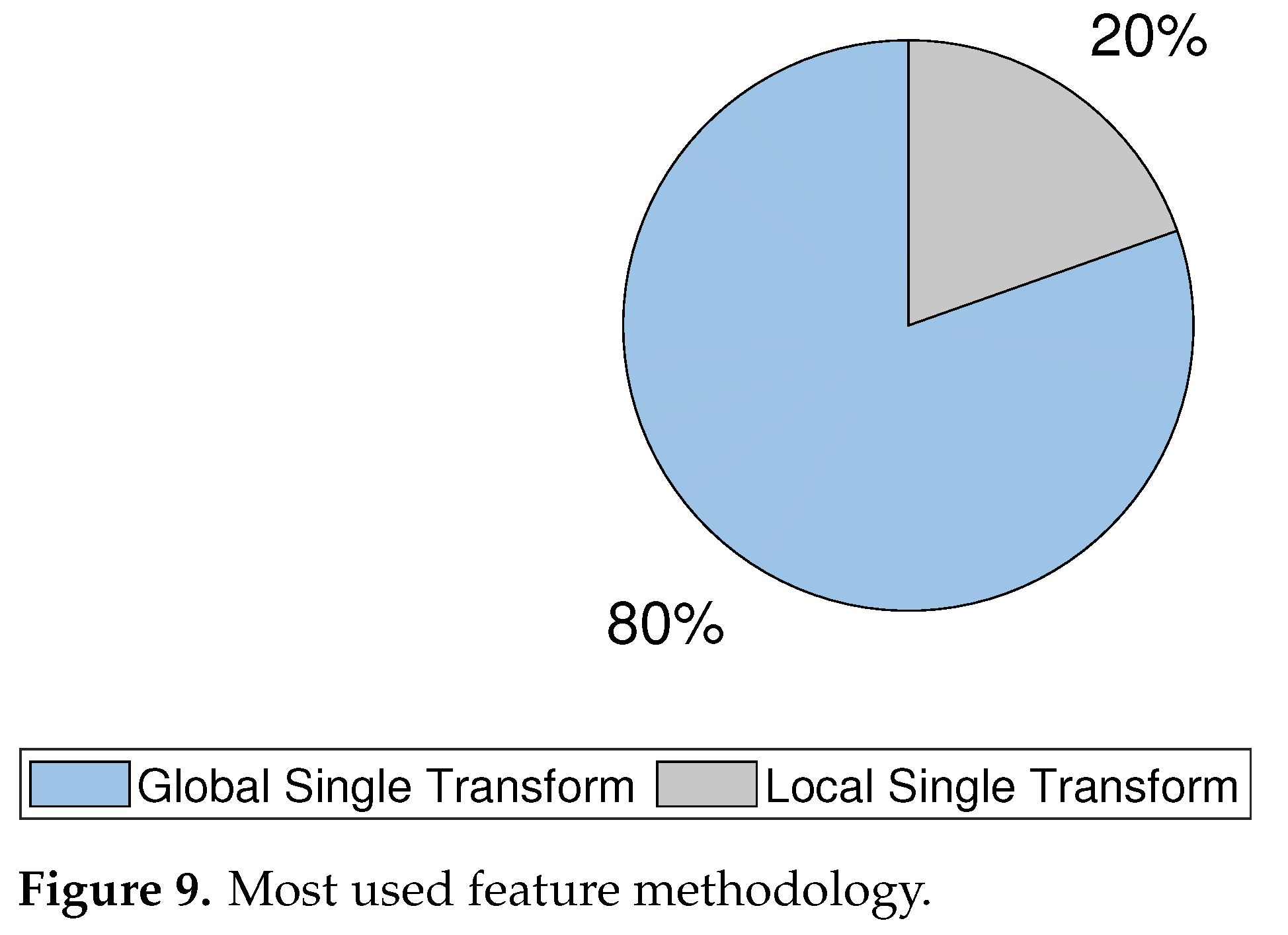
3.1. Feature-Based: Global Single Transformation
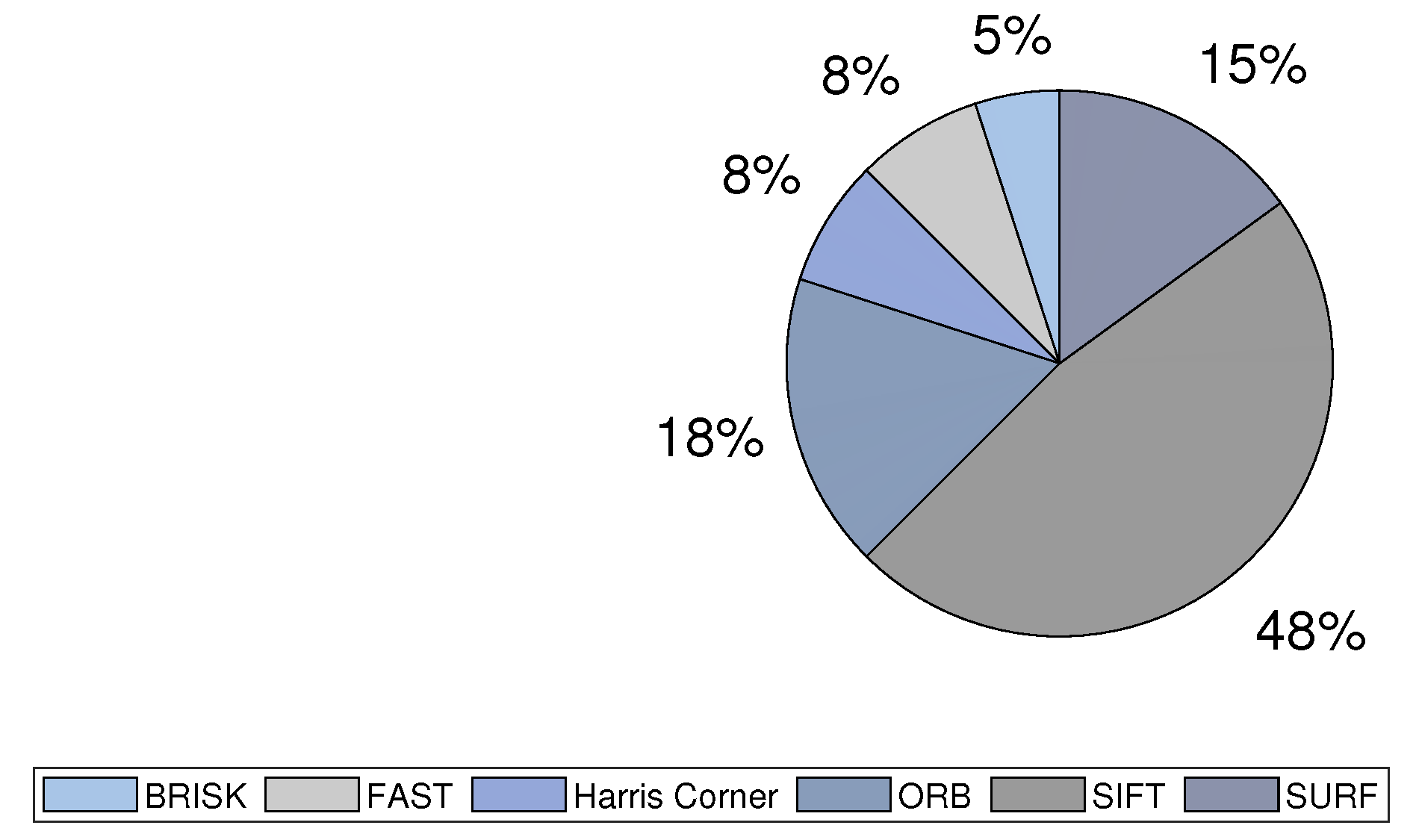
3.1.1. Harris Corner
- Flat area: both and are very small.
- Edge: one of and is smaller and the other is bigger.
- Corner: both and are bigger and are nearly equal.
3.1.2. SIFT
3.1.3. FAST
3.1.4. ORB
3.1.5. SURF
3.1.6. BRISK
3.2. Feature-Based: Local Hybrid Transformation
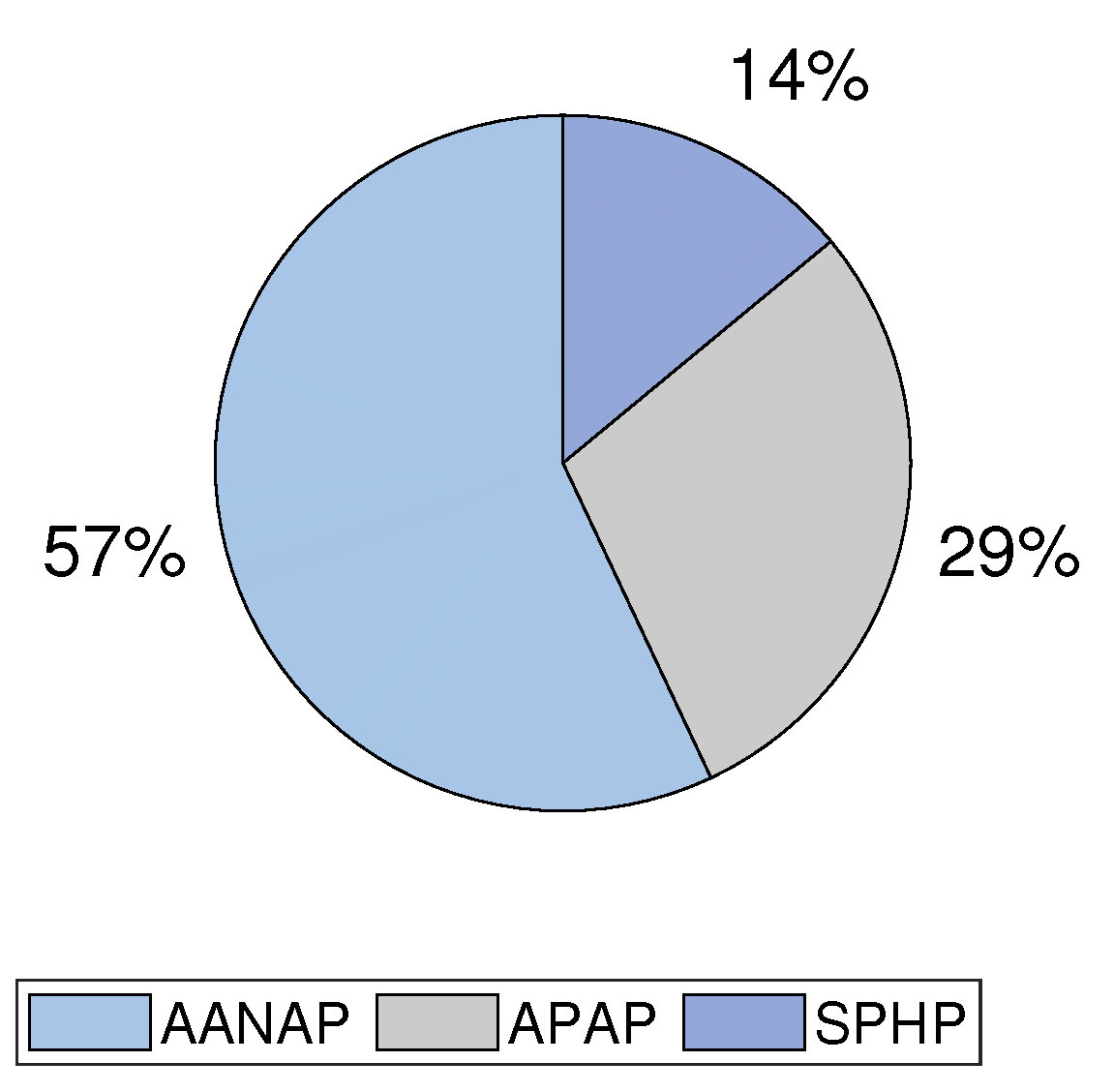
3.2.1. APAP
3.2.2. SPHP
3.2.3. AANAP
4. Aerial Panorama Applications
4.1. Feature-Based: Global Single Transformation
4.1.1. Harris Corner
4.1.2. SIFT
4.1.3. FAST
4.1.4. ORB
4.1.5. SURF
4.1.6. BRISK
4.2. Feature-Based: Local Hybrid Transformation
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ait-Aoudia, S.; Mahiou, R.; Djebli, H.; Guerrout, E.H. Satellite and Aerial Image Mosaicing—A Comparative Insight. In Proceedings of the 2012 16th International Conference on Information Visualisation, Montpellier, France, 11–13 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 652–657. [Google Scholar] [CrossRef]
- Ghosh, D.; Kaabouch, N.; Semke, W. Super-Resolution Mosaicing of Unmanned Aircraft System (UAS) Surveillance Video Frames. Int. J. Sci. Eng. Res. 2013, 4, 1–9. [Google Scholar]
- Misra, I.; Manthira Moorthi, S.; Dhar, D.; Ramakrishnan, R. An automatic satellite image registration technique based on Harris corner detection and Random Sample Consensus (RANSAC) outlier rejection model. In Proceedings of the 2012 1st International Conference on Recent Advances in Information Technology, RAIT-2012, Dhanbad, India, 15–17 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 68–73. [Google Scholar] [CrossRef]
- Tsao, P.; Ik, T.U.; Chen, G.W.; Peng, W.C. Stitching aerial images for vehicle positioning and tracking. In Proceedings of the IEEE International Conference on Data Mining Workshops, ICDMW, Singapore, 17–20 November 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 616–623. [Google Scholar] [CrossRef]
- Wei, Q.; Lao, S.; Bai, L. Panorama stitching, moving object detection and tracking in UAV Videos. In Proceedings of the 2017 International Conference on Vision, Image and Signal Processing, ICVISP 2017, Osaka, Japan, 22–24 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 46–50. [Google Scholar] [CrossRef]
- Dong, N.; Ren, X.; Sun, M.; Jiang, C.; Zheng, H. Fast stereo aerial image construction and measurement for emergency rescue. In Proceedings of the 2013 5th International Conference on Geo-Information Technologies for Natural Disaster Management, GiT4NDM 2013, Mississauga, ON, Canada, 9–11 October 2013; IEEE: Piscataway, NJ, USA, 2014; pp. 119–123. [Google Scholar] [CrossRef]
- Lenjani, A.; Yeum, C.M.; Dyke, S.; Bilionis, I. Automated building image extraction from 360° panoramas for postdisaster evaluation. Comput. Aided Civ. Infrastruct. Eng. 2020, 35, 241–257. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Liao, T.; Wang, C. Perception-based seam cutting for image stitching. Signal Image Video Process. 2018, 12, 967–974. [Google Scholar] [CrossRef]
- Tariq, A.; Gillani, S.M.A.; Qureshi, H.K.; Haneef, I. Heritage preservation using aerial imagery from light weight low cost Unmanned Aerial Vehicle (UAV). In Proceedings of the International Conference on Communication Technologies, ComTech 2017, Rawalpindi, Pakistan, 19–21 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 201–205. [Google Scholar] [CrossRef]
- Sankey, T.; Donager, J.; McVay, J.; Sankey, J.B. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA. Remote Sens. Environ. 2017, 195, 30–43. [Google Scholar] [CrossRef]
- ŞASİ, A.; YAKAR, M. Photogrammetric modelling of hasbey dar’ülhuffaz (masjid) using an unmanned aerial vehicle. Int. J. Eng. Geosci. 2018, 3, 6–11. [Google Scholar] [CrossRef]
- Doğan, Y.; Yakar, M. Gis and three-dimensional modeling for cultural heritages. Int. J. Eng. Geosci. 2018, 3, 50–55. [Google Scholar] [CrossRef] [Green Version]
- Dawn, S.; Khera, A.; Agarwal, N.; Arora, A. Panorama Generation from a Video. In Proceedings of the 2018 5th IEEE Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering, UPCON 2018, Uttar Pradesh, India, 2–4 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef] [Green Version]
- Yuan, W.; Choi, D. UAV-based heating requirement determination for frost management in apple orchard. Remote Sens. 2021, 13, 273. [Google Scholar] [CrossRef]
- Mistry, S.; Patel, A. Image Stitching using Harris Feature Detection. Int. Res. J. Eng. Technol. 2016, 3, 1363–1369. [Google Scholar]
- Pandey, A.; Pati, U.C. Image mosaicing: A deeper insight. Image Vis. Comput. 2019, 89, 236–257. [Google Scholar] [CrossRef]
- Mustafa, R.; Dhar, P. A method to recognize food using GIST and SURF features. In Proceedings of the 2018 Joint 7th International Conference on Informatics, Electronics and Vision and 2nd International Conference on Imaging, Vision and Pattern Recognition, ICIEV-IVPR 2018, Kitakyushu, Japan, 25–29 June 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 127–130. [Google Scholar] [CrossRef]
- Tahir, W.; Majeed, A.; Rehman, T. Indoor/outdoor image classification using GIST image features and neural network classifiers. In Proceedings of the 2015 12th International Conference on High-Capacity Optical Networks and Enabling/Emerging Technologies (HONET), Islamabad, Pakistan, 21–23 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Zomet, A.; Levin, A.; Peleg, S.; Weiss, Y. Seamless image stitching by minimizing false edges. IEEE Trans. Image Process. 2006, 15, 969–977. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lyu, W.; Zhou, Z.; Chen, L.; Zhou, Y. A survey on image and video stitching. Virtual Real. Intell. Hardw. 2019, 1, 55–83. [Google Scholar] [CrossRef]
- Ghosh, D.; Kaabouch, N. A survey on image mosaicing techniques. J. Vis. Commun. Image Represent. 2016, 34, 1–11. [Google Scholar] [CrossRef]
- Bignalet-Cazalet, F.; Baillarin, S.; Greslou, D.; Panem, C. Automatic and generic mosaicing of satellite images. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Honolulu, HI, USA, 25–30 July 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 3158–3161. [Google Scholar] [CrossRef]
- Zhang, T.; Lei, B.; Gan, Y.; Hu, Y.; Liu, K. National satellite image coverage using overall planning technique. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 5488–5491. [Google Scholar] [CrossRef]
- Hsieh, S.L.; Chen, Y.W.; Chen, C.C.; Chang, T.W. A geometry-distortion resistant image detection system based on log-polar transform and scale invariant feature transform. In Proceedings of the 2011 IEEE International Conference on High Performance Computing and Communications(HPCC), Banff, AB, Canada, 2–4 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 893–897. [Google Scholar] [CrossRef]
- Kalluri, S.; Csiszar, I.; Kondragunta, S.; Laszlo, I. Non-Meteorological Application of New Generation Geostatinary Satellites. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 8773–8776. [Google Scholar] [CrossRef]
- Matungka, R.; Zheng, Y.F.; Ewing, R.L. Aerial image registration using projective polar transform. In Proceedings of the ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing; ICASSP 2009, Taipei, Taiwan, 19–24 April 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1061–1064. [Google Scholar] [CrossRef]
- Singh, A.K.; Gopala Krishna, B.; Srivastava, P.K. Satellite platform stability estimation using image matching. In Proceedings of the 2011 IEEE Recent Advances in Intelligent Computational Systems, RAICS 2011, Trivandrum, India, 22–24 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 378–380. [Google Scholar] [CrossRef]
- Tang, H.; Tang, F. AH-SIFT: Augmented Histogram based SIFT descriptor. In Proceedings of the International Conference on Image Processing, ICIP, Orlando, FL, USA, 30 September–3 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 2357–2360. [Google Scholar] [CrossRef]
- Adel, E.; Elmogy, M.; Elbakry, H. Image Stitching System Based on ORB Feature-Based Technique and Compensation Blending. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 55–62. [Google Scholar] [CrossRef] [Green Version]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2012; Volume 7577, pp. 214–227. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-Up Robust Features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Brown, M.; Lowe, D.G. Automatic panoramic image stitching using invariant features. Int. J. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Li, G.; Wang, S. The fusion of satellite and unmanned aerial vehicle (UAV) imagery for improving classification performance. In Proceedings of the 2018 IEEE International Conference on Information and Automation (ICIA), Wuyishan, China, 11–13 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 836–841. [Google Scholar] [CrossRef]
- Emilien, A.V.; Thomas, C.; Thomas, H. UAV & satellite synergies for optical remote sensing applications: A literature review. Sci. Remote Sens. 2021, 3, 100019. [Google Scholar] [CrossRef]
- Szeliski, R. Image Alignment and Stitching: A Tutorial. Found. Trends Comput. Graph. Vis. 2007, 2, 1–104. [Google Scholar] [CrossRef]
- Bhadane, D.; Pawar, K.N. A Review Paper on Various Approaches for Image Mosaicing. Int. J. Eng. Manag. Res. 2013, 62, 193–195. [Google Scholar]
- Torr, P.H.S.; Zisserman, A. Feature Based Methods for Structure and Motion Estimation. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2000; Volume 1883, pp. 278–294. [Google Scholar] [CrossRef]
- Adel, E.; Elmogy, M.; Elbakry, H. Image Stitching based on Feature Extraction Techniques: A Survey. Int. J. Comput. Appl. 2014, 99, 1–8. [Google Scholar] [CrossRef]
- Ju, M.H.; Kang, H.B. Panoramic image generation with lens distortions. In Proceedings of the 2013 IEEE International Conference on Image Processing, ICIP 2013, Melbourne, VIC, Australia, 15–18 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1296–1300. [Google Scholar] [CrossRef]
- Sovetov, K.; Kim, J.S.; Kim, D. Online Panorama Image Generation for a Disaster Rescue Vehicle. In Proceedings of the 2019 16th International Conference on Ubiquitous Robots (UR), Jeju, Korea, 24–27 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 92–97. [Google Scholar] [CrossRef]
- Zia, O.; Kim, J.h.; Han, K.; Lee, J.W. 360° Panorama Generation using Drone Mounted Fisheye Cameras. In Proceedings of the 2019 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 11–13 January 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–3. [Google Scholar] [CrossRef]
- Huang, J.; Chen, Z.; Ceylan, D.; Jin, H. 6-DOF VR videos with a single 360-camera. In Proceedings of the 2017 IEEE Virtual Reality (VR), Los Angeles, CA, USA, 18–22 March 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 37–44. [Google Scholar] [CrossRef]
- Workman, S.; Greenwell, C.; Zhai, M.; Baltenberger, R.; Jacobs, N. DEEPFOCAL: A method for direct focal length estimation. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1369–1373. [Google Scholar] [CrossRef] [Green Version]
- Azarbayejani, A.; Pentland, A.P. Recursive Estimation of Motion, Structure, and Focal Length. IEEE Trans. Pattern Anal. Mach. Intell. 1995, 17, 562–575. [Google Scholar] [CrossRef]
- Kriegman, D. Homography estimation from planar contours in image sequence. Opt. Eng. 2007, 49, 037202. [Google Scholar] [CrossRef]
- Li, E.; Mo, H.; Xu, D.; Li, H. Image Projective Invariants. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 1144–1157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tareen, S.A.K.; Saleem, Z. A comparative analysis of SIFT, SURF, KAZE, AKAZE, ORB, and BRISK. In Proceedings of the 2018 International Conference on Computing, Mathematics and Engineering Technologies: Invent, Innovate and Integrate for Socioeconomic Development, iCoMET 2018, Sukkur, Pakistan, 3–4 March 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision; Texts in Computer Science; Springer: London, UK, 2011; Volume 42, p. 823. ISBN 978-1-84882-935-0. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Chum, O.; Matas, J. Matching with PROSAC—Progressive Sample Consensus. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 1, pp. 220–226. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, A.; Jawahar, C.V.; Narayanan, P.J. A Survey of Planar Homography Estimation Techniques; Technical Report; International Institute of Information Technology: Hyderabad, India, 2005. [Google Scholar]
- Reboucas, R.A.; Eller, Q.d.C.; Habermann, M.; Shiguemori, E.H. Visual Odometry and Moving Objects Localization Using ORB and RANSAC in Aerial Images Acquired by Unmanned Aerial Vehicles. In Proceedings of the 2013 BRICS Congress on Computational Intelligence and 11th Brazilian Congress on Computational Intelligence, Ipojuca, Brazil, 8–11 September 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 441–446. [Google Scholar] [CrossRef]
- Triggs, B.; McLauchlan, P.F.; Hartley, R.I.; Fitzgibbon, A.W. Bundle Adjustment—A Modern Synthesis. In Lecture Notes in Computer Science (including Subseries Vision Algorithms: Theory and Practice); Springer: Berlin/Heidelberg, Germany, 2000; Volume 1883, pp. 298–372. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, S.; Snavely, N.; Seitz, S.M.; Szeliski, R. Bundle Adjustment in the Large. In Proceedings of the Computer Vision—ECCV 2010, Crete, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; pp. 29–42. [Google Scholar] [CrossRef]
- Shi, D.; Fan, Z.; Yin, H.; Liu, D.C. Fast GPU-based automatic time gain compensation for ultrasound imaging. In Proceedings of the 2010 4th International Conference on Bioinformatics and Biomedical Engineering, iCBBE 2010, Chengdu, China, 18–20 June 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–3. [Google Scholar] [CrossRef]
- Burt, P.J.; Adelson, E.H. A multiresolution spline with application to image mosaics. ACM Trans. Graph. TOG 1983, 2, 217–236. [Google Scholar] [CrossRef]
- Zhao, N.; Zheng, X. Multi-band blending of aerial images using GPU acceleration. In Proceedings of the 2017 10th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Shanghai, China, 14–16 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Lee, S.; Lee, S.J.; Park, J.; Kim, H.J. Exposure correction and image blending for planar panorama stitching. In Proceedings of the 2016 16th International Conference on Control, Automation and Systems (ICCAS), Gyeongju, Korea, 16–19 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 128–131. [Google Scholar] [CrossRef]
- Tian, F.; Shi, P. Image Mosaic using ORB descriptor and improved blending algorithm. In Proceedings of the 2014 7th International Congress on Image and Signal Processing, CISP 2014, Dalian, China, 14–16 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 693–698. [Google Scholar] [CrossRef]
- Bind, V.S. Robust Techniques for Feature-based Image Mosaicing. Ph.D. Thesis, National Institute of Technology Rourkela, Odisha, India, 2013. [Google Scholar]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. In Proceedings of the Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; The Plessey Company PLC.: London, UK, 1988; pp. 147–151. [Google Scholar]
- Rosten, E.; Drummond, T. Fusing Points and Lines for High Performance Tracking. In Proceedings of the 10th IEEE International Conference on Computer Vision, Beijing, China, 17–21 October 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 2, pp. 1508–1515. [Google Scholar] [CrossRef]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2564–2571. [Google Scholar] [CrossRef]
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary Robust Independent Elementary Features. In Lecture Notes in Computer Science (including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics, Crete, Greece, 5–11 September 2010; Springer: Berlin/Heidelberg, Germany, 2010; Volume 6314, pp. 778–792. [Google Scholar] [CrossRef] [Green Version]
- Leutenegger, S.; Chli, M.; Siegwart, R.Y. BRISK: Binary Robust invariant scalable keypoints. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 2548–2555. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Joshi, H.; Sinha, M. A Survey on Image Mosaicing Techniques. Int. J. Adv. Res. Comput. Eng. Technol. 2013, 2, 365–369. [Google Scholar]
- Xiang, T.Z.; Xia, G.S.; Bai, X.; Zhang, L. Image stitching by line-guided local warping with global similarity constraint. Pattern Recognit. 2018, 83, 481–497. [Google Scholar] [CrossRef] [Green Version]
- Trajković, M.; Hedley, M. Fast corner detection. Image Vis. Comput. 1998, 16, 75–87. [Google Scholar] [CrossRef]
- Rosten, E.; Drummond, T. Machine Learning for High-Speed Corner Detection. In Computer Vision—ECCV 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 430–443. [Google Scholar] [CrossRef]
- Jing, H.; He, X.; Han, Q.; Niu, X. CBRISK: Colored binary robust invariant scalable keypoints. IEICE Trans. Inf. Syst. 2013, 96, 392–395. [Google Scholar] [CrossRef] [Green Version]
- Yang, S.; Li, B.; Zeng, K. SBRISK: Speed-up binary robust invariant scalable keypoints. J. Real-Time Image Process. 2016, 12, 583–591. [Google Scholar] [CrossRef]
- Pan, F.; Shang, H. Enhacing Image Mosaicing with Adaptive Local Homographies. In Proceedings of the International Conference on Digital Signal Processing, DSP, Shanghai, China, 19–21 November 2018; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Chang, C.H.; Sato, Y.; Chuang, Y.Y. Shape-Preserving Half-Projective Warps for Image Stitching. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; IEEE: Piscataway, NJ, USA, 2014; Volume 1, pp. 3254–3261. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.C.; Pankanti, S.U.; Ramamurthy, K.N.; Aravkin, A.Y. Adaptive as-natural-as-possible image stitching. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 1155–1163. [Google Scholar] [CrossRef] [Green Version]
- Han, S.; Yu, W.; Yang, H.; Wan, S. An Improved Corner Detection Algorithm Based on Harris. In Proceedings of the 2018 Chinese Automation Congress, CAC 2018, Xi’an, China, 30 November–2 December 2018; IEEE: Piscataway, NJ, USA, 2019; pp. 1575–1580. [Google Scholar] [CrossRef]
- Yuanting, X.; Yi, L.; Kun, Y.; Chunxue, S. Research on image mosaic of low altitude UAV based on harris corner detection. In Proceedings of the 2019 14th IEEE International Conference on Electronic Measurement & Instruments(ICEMI), Changsha, China, 1–3 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 639–645. [Google Scholar] [CrossRef]
- Hong, Y.X.; Jie, Z.Q.; Dan Dan, Z.; Xin, S.X.; Jing, X. UAV image automatic mosaic method based on matching of feature points. In Proceedings of the 2013 Chinese Automation Congress, Changsha, China, 7–8 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 33–36. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, X.; Li, X. UAV image matching based on surf feature and harris corner algorithm. In Proceedings of the 4th International Conference on Smart and Sustainable City (ICSSC 2017), Shanghai, China, 5–6 June 2017; Institution of Engineering and Technology: Savoy Place: London, UK, 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Ni, Z.S. B-SIFT: A binary SIFT based local image feature descriptor. In Proceedings of the 4th International Conference on Digital Home, ICDH 2012, Guangzhou, China, 23–25 November 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 117–121. [Google Scholar] [CrossRef]
- Wang, Y.; Camargo, A.; Fevig, R.; Martel, F.; Schultz, R.R. Image mosaicking from uncooled thermal IR video captured by a small UAV. In Proceedings of the IEEE Southwest Symposium on Image Analysis and Interpretation, Santa Fe, NM, USA, 24–26 March 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 161–164. [Google Scholar] [CrossRef]
- Ye, J.G.; Chen, H.T.; Tsai, W.J. Panorama Generation Based on Aerial Images. In Proceedings of the 2018 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), San Diego, CA, USA, 23–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Xiaoyue, J.; Xiaojia, X.; Jian, H. Real-Time Panorama Stitching Method for UAV Sensor Images Based on the Feature Matching Validity Prediction of Grey Relational Analysis. In Proceedings of the 2018 15th International Conference on Control Automation, Robotics and Vision, ICARCV 2018, Singapore, 18–21 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1454–1459. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, T.; Liu, L.; Liang, B.; Bai, Y.; Li, J. Image-Only Real-Time Incremental UAV Image Mosaic for Multi-Strip Flight. IEEE Trans. Multimed. 2021, 23, 1410–1425. [Google Scholar] [CrossRef]
- Liu, H.; Lv, M.; Gao, Y.; Li, J.; Lan, J.; Gao, W. Information Processing System Design for Multi-rotor UAV-Based Earthquake Rescue. In Man-Machine-Environment System Engineering; Springer: Singapore, 2020; Volume 645, pp. 321–330. [Google Scholar] [CrossRef]
- Verykokou, S.; Ioannidis, C.; Athanasiou, G.; Doulamis, N.; Amditis, A. 3D reconstruction of disaster scenes for urban search and rescue. Multimed. Tools Appl. 2018, 77, 9691–9717. [Google Scholar] [CrossRef]
- Ismail, H.; Rahmani, A.; Aljasmi, N.; Quadir, J. Stitching Approach for PV Panel Detection. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Hu, D.; Wang, Y.; Hu, Q.; Hu, W. The construction method of measurable aerial panorama based on panoramic image and multi-view oblique images matching. In Proceedings of the 4th International Workshop on Earth Observation and Remote Sensing Applications, EORSA 2016, Guangzhou, China, 4–6 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 232–236. [Google Scholar] [CrossRef]
- Adel, E.; Elmogy, M.; Elbakry, H. Real time image mosaicing system based on feature extraction techniques. In Proceedings of the 2014 9th IEEE International Conference on Computer Engineering and Systems, ICCES 2014, Cairo, Egypt, 22–23 December 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 339–345. [Google Scholar] [CrossRef]
- Wu, L.; Gao, Y.; Zhang, J. An improved SIFT algorithm based on FAST corner detection. In Proceedings of the 2013 9th International Conference on Intelligent Information Hiding and Multimedia Signal Processing, IIH-MSP 2013, Beijing, China, 16–18 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 202–205. [Google Scholar] [CrossRef]
- Botterill, T.; Mills, S.; Green, R. Real-time aerial image mosaicing. In Proceedings of the International Conference Image and Vision Computing New Zealand, Queenstown, New Zealand, 8–9 November 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Zhang, X.; Hu, Q.; Ai, M.; Ren, X. A Multitemporal UAV Images Registration Approach Using Phase Congruency. In Proceedings of the International Conference on Geoinformatics, Kunming, China, 28–30 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Almagbile, A. Estimation of crowd density from UAVs images based on corner detection procedures and clustering analysis. Geo-Spat. Inf. Sci. 2019, 22, 23–34. [Google Scholar] [CrossRef]
- Chen, J.; Luo, L.; Wang, S.; Wu, H. Automatic Panoramic UAV Image Mosaic Using ORB Features and Robust Transformation Estimation. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 4265–4270. [Google Scholar] [CrossRef]
- Yeh, C.C.; Chang, Y.L.; Hsu, P.H.; Hsien, C.H. GPU acceleration of UAV image splicing using oriented fast and rotated brief combined with PCA. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Valencia, Spain, 22–27 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5700–5703. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, J.; Zhang, L.; Wang, S. Research on panorama reconstruction technique of UAV aerial image based on improved ORB algorithm. In Proceedings of the 2019 IEEE 3rd International Conference on Electronic Information Technology and Computer Engineering, EITCE 2019, Xiamen, China, 18–20 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1252–1256. [Google Scholar] [CrossRef]
- Wang, S.; Zhang, Y.; Wang, W.; Zhao, Y.; Zhu, S. A Novel Image Mosaic Method Based on Improved ORB and its Application in Police-UAV. In Proceedings of the IEEE 2018 International Congress on Cybermatics: 2018 IEEE Conferences on Internet of Things, Green Computing and Communications, Cyber, Physical and Social Computing, Smart Data, Blockchain, Computer and Information Technology, iThings/Gree, Halifax, NS, Canada, 30 July–3 August 2018; pp. 1707–1713. [Google Scholar] [CrossRef]
- Wu, Z.; Yue, P.; Zhang, M.; Tan, Z. A workflow approach for mosaicking UAV images. In Proceedings of the 2016 5th International Conference on Agro-Geoinformatics, Agro-Geoinformatics 2016, Tianjin, China, 18–20 July 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Hadrovic, E.; Osmankovic, D.; Velagic, J. Aerial image mosaicing approach based on feature matching. In Proceedings of the Proceedings Elmar—International Symposium Electronics in Marine, Zadar, Croatia, 18–20 September 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 177–180. [Google Scholar] [CrossRef]
- Micheal, A.A.; Vani, K. Comparative analysis of SIFT and SURF on KLT tracker for UAV applications. In Proceedings of the 2017 IEEE International Conference on Communication and Signal Processing, ICCSP 2017, Chennai, India, 6–8 April 2017; IEEE: Piscataway, NJ, USA, 2018; pp. 1000–1003. [Google Scholar] [CrossRef]
- Yue, M.; Yan, Q. UAV remote sensing positioning algorithm based on image registration. In Proceedings of the 2020 IEEE International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 6–8 November 2020; IEEE: Piscataway, NJ, USA, 2020; Volume 1, pp. 926–931. [Google Scholar] [CrossRef]
- Tsai, C.H.; Lin, Y.C. An accelerated image matching technique for UAV orthoimage registration. ISPRS J. Photogramm. Remote Sens. 2017, 128, 130–145. [Google Scholar] [CrossRef]
- Fang, F.; Wang, T.; Fang, Y.; Zhang, G. Fast Color Blending for Seamless Image Stitching. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1115–1119. [Google Scholar] [CrossRef]
- Leng, J.; Wang, S. UAV Remote Sensing Image Mosaic Technology Combined with Improved SPHP Algorithm. In Proceedings of the 2020 IEEE Int. Conf. Mechatronics Autom. ICMA 2020, Beijing, China, 13–16 October 2020; IEEE: Piscataway, NJ, USA, 2020; Volume 2, pp. 1155–1160. [Google Scholar] [CrossRef]
- Ramaswamy, A.; Gubbi, J.; Raj, R.; Purushothaman, B. Frame stitching in indoor environment using drone captured images. In Proceedings of the International Conference on Image Processing, ICIP, Athens, Greece, 7–10 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 91–95. [Google Scholar] [CrossRef]
- Wan, Q.; Chen, J.; Luo, L.; Gong, W.; Wei, L. Drone Image Stitching Using Local Mesh-Based Bundle Adjustment and Shape-Preserving Transform. In Proceedings of the IEEE Transactions on Geoscience and Remote Sensing, Waikoloa, HI, USA, 2 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–11. [Google Scholar] [CrossRef]
- Lan, X.; Guo, B.; Huang, Z.; Zhang, S. An Improved UAV Aerial Image Mosaic Algorithm Based on GMS-RANSAC. In Proceedings of the 2020 IEEE 5th International Conference on Signal and Image Processing, ICSIP 2020, Nanjing, China, 23–25 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 148–152. [Google Scholar] [CrossRef]
- Xu, Q.; Luo, L.; Chen, J.; Gong, W.; Guo, D. UAV Image Mosaicing Based Multi-Region Local Projection Deformation. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1845–1848. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Lai, S.; Zhai, Y.; Zhang, M. Parallax-Tolerant Image Stitching Based on Robust Elastic Warping. IEEE Trans. Multimed. 2018, 20, 1672–1687. [Google Scholar] [CrossRef]
- Ullah, H.; Zia, O.; Kim, J.H.; Han, K.; Weon Lee, J. Automatic 360° Mono-Stereo Panorama Generation Using a Cost-Effective Multi-Camera System. Sensors 2020, 20, 3097. [Google Scholar] [CrossRef]
- Zhou, Y.; Rui, T.; Li, Y.; Zuo, X. A UAV patrol system using panoramic stitching and object detection. Comput. Electr. Eng. 2019, 80, 106473. [Google Scholar] [CrossRef]
- Luo, L.; Wan, Q.; Chen, J.; Wang, Y.; Mei, X. Drone image stitching guided by robust elastic warping and locality preserving matching. In Proceedings of the IGARSS 2019—2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 28 July–2 August 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 9212–9215. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | UAVs | Satellites |
|---|---|---|
| Flexibility | High | Low |
| Cloud dependence | No | Yes |
| Direct meteorological constraint | Wind and precipitation | No |
| Operator required | Yes | No |
| Payload | Interchangeable | Permanent |
| Legislation | Restrictive | None |
| Data update | Constant Refreshing | Periodical |
| Working Time | Short (battery life) | Long (Limited to satellite life) |
| Author | Advantage |
|---|---|
| X. Yuanting et al. (2019) [78] | This algorithm improves the stitching speed. |
| C. Cheng et al. (2017) [80] | Image matching accuracy is improved with less processing time. |
| Y. Hong et al. (2013) [79] | Efficiency and accuracy are improved by registration constraint. |
| Author | Advantage |
|---|---|
| D. Ghosh et al. (2013) [2] | The SR algorithm improves in effectiviness. |
| J. Ye et al. (2018) [83] | The speed estimation performs the aerial panorama in a short time with appropriate aspect ratios and good visual quality. |
| P. Tsao et al. (2019) [4] | A positioning system based on image stitching and top-view transformation is proposed, relating it to the GPS data to calculate the relative UAV position for distance measurements and object localization. |
| J. Xiaoyue et al. (2018) [84] | Stitching region prediction based on IMU and GPS information is used for image stitching using SIFT. |
| S. Verykokou et al. (2018) [87] | A FAST 3D modeling of fully or partially collapsed buildings using images from UAVs for the Urban Search and Rescue task is proposed. |
| Author | Advantage |
|---|---|
| T. Botterill, S. Mills, R. Green [92] | Images are registered and stitched together seamlessly in real time. |
| X. Zhang, Q. Hu, M. Ai et al. [93] | By applying phase congruence, the images are stitched evenly with color changes and illumination. |
| Ali Almagbile [94] | Accuracy of FAST-9 and FAST-12 methodology, compared in terms of completeness and correctness, is improved. |
| Author | Advantage |
|---|---|
| J. Chen et al. (2018) [95] | The LPM with Bayesian framework improves the computation time and the efficiency while ensuring accuracy compared with the state-of-the-art methods. |
| O. Zia et al. (2019) [42] | By using fisheye lenses, a good region of overlap is obtained between adjacent cameras. |
| C. Yeh et al. (2018) [96] | ORB / PCA splice detection is faster and more accurate than the classic SIFT and SURF approaches. In addition, the GPU performs the test 2.6 times faster than the CPU test. |
| Y. Zhang et al. (2019) [97] | The methodology reduces the calculation time of completing the reconstruction of the panorama compared to SIFT and classic ORB. |
| R. Reboucas et al. (2013) [53] | A fast visual odometry tracking system is developed. |
| Author | Advantage |
|---|---|
| E. Hadrovic, D. Osmankovic, J. Velagic. [100] | The algorithm is relatively fast compared to alignment algorithms based on SIFT feature matching with a high-quality alignment. |
| M. Yue, Q. Yan [102] | A real-time reconnaissance and monitoring application can achieve an accurate positioning without the need of increasing the camera accuracy. |
| A. Micheal, K. Vani [101] | Implementing a semiautomatic object tracking method using SIFT or SURF with a high detection rate, the region of interest is specified by the user. |
| Z. Wu, P. Yue, M. Zhang et al. [99] | The workflow approach generates an automatic mosaic of UAV images with the flexibility to edit the workflow depending on the user needs. |
| Author | Advantage |
|---|---|
| C. Tsai, Y. Lin [103] | The positional accuracy of the UAV orthoimage by applying the proposed image registration scheme improves the correctness of the process. |
| W.Yuan, D. Choi [15] | The stitching speed of 100 thermal images within 30 s and RGB correlation and classification are improved. |
| Author | Advantage |
|---|---|
| F. Fang et al. [104] | A superpixel image is generated, improving the efficiency and flexibility of the target image to reduce the color differences between the two input images. |
| J. Leng, S. Wang [105] | The SPHP algorithm is improved, removing the ghost image of the stitched image and generating better stitching results. |
| Y. Zhou et al. (2019) [112] | Image stitching improves from the captured video by eliminating the ghosts caused by moving objects and object detection module, providing high detection accuracy. |
| Y. Yuan et al. [15] | The SLIC algorithm is used to generate superpixels in the seam cutting and color blending stages, affording spatial coherency and improving the efficiency. |
| Q. Wan et al. [107] | The local alignment model introduces parallax errors as a constraint term into the minimum energy function and uses the mesh-based deformation to accelerate the calculation. |
| L. Luo, Q. Wan, J. Chen et al. [113] | The inaccuracy results are compared with RMS and show an improvement compared to APAP, SPHP, and REW in time processing. |
| Q. Xu, L. Luo, J. Chen et al. [109] | The accuracy of the method is improved, compared to most used mesh analyses, and the computational cost is comparable to that of AANAP. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gómez-Reyes, J.K.; Benítez-Rangel, J.P.; Morales-Hernández, L.A.; Resendiz-Ochoa, E.; Camarillo-Gomez, K.A. Image Mosaicing Applied on UAVs Survey. Appl. Sci. 2022, 12, 2729. https://doi.org/10.3390/app12052729
Gómez-Reyes JK, Benítez-Rangel JP, Morales-Hernández LA, Resendiz-Ochoa E, Camarillo-Gomez KA. Image Mosaicing Applied on UAVs Survey. Applied Sciences. 2022; 12(5):2729. https://doi.org/10.3390/app12052729
Chicago/Turabian StyleGómez-Reyes, Jean K., Juan P. Benítez-Rangel, Luis A. Morales-Hernández, Emmanuel Resendiz-Ochoa, and Karla A. Camarillo-Gomez. 2022. "Image Mosaicing Applied on UAVs Survey" Applied Sciences 12, no. 5: 2729. https://doi.org/10.3390/app12052729
APA StyleGómez-Reyes, J. K., Benítez-Rangel, J. P., Morales-Hernández, L. A., Resendiz-Ochoa, E., & Camarillo-Gomez, K. A. (2022). Image Mosaicing Applied on UAVs Survey. Applied Sciences, 12(5), 2729. https://doi.org/10.3390/app12052729