1. Introduction
The safety of passengers has always been a concern of maritime authorities and scholars, especially regarding the evacuation problem of some large passenger ships such as cruise ships. Cruise ships generally have ten or more decks, and most passengers need to traverse several decks to arrive at the embarkation area in the event of an emergency. The evacuation process is also related to the walking speed and the behavior of the passengers. In order to ensure the safety of passengers, some scholars have carried out research on ship evacuation.
The research methods used in studying ship evacuation mainly include data collection, experiments, simulations, and so on. Luo [
1] adopted the cutting-edge sensor mesh technology of ScanReach to observe the movement trajectory and evacuation process of pedestrians in real-time. Wang et al. [
2,
3] investigated the possible behaviors of passengers during evacuation through a questionnaire survey. Casareale et al. [
4] analyzed the characteristics of evacuation behavior of pedestrians through another survey. At present, a relatively comprehensive evacuation experiment for passenger ships is project SAFEGUARD [
5]. This project carried out evacuation experiments on cruise ships and ROPAX ferries, and collected data related to the response duration and evacuation time of passengers [
6,
7].
In addition, some scholars have studied ship evacuation through simulations due to the high cost of experiments. Evacuations can be simulated by means of simplified or advanced approaches. Simplified approaches assume pedestrian flow as a hydraulic or flow model, and the advanced approaches assume each pedestrian to be an individual [
8]. Most software for evacuation is based on advanced approaches. Gwynne et al. [
9,
10] conducted an evacuation simulation for naval vessels and tour boats using the maritimeEXODUS software. Vassalos [
11,
12] used EVI software to analyze the influence of passenger speed on evacuation time. Ginnis et al. [
13,
14,
15] developed the Virtual Environment for Life on Ships system and evaluated the influence of ship motion on the evacuation characteristics of passengers by the system. Meyer-König et al. [
16] studied the influence of the trim and pitch angles on pedestrian movement by using AENEAS software to build the passenger evacuation model of a RoPax ship. Hu et al. [
17,
18] simulated the evacuation process of passengers in a cruise ship by using cellular automata and the multi-grid model, and they analyzed the evacuation characteristics of pedestrians under different floating conditions of the cruise ship. Ni et al. [
19,
20] studied the behavior of passengers’ return cabins regarding wearing life jackets and simulated the evacuation process using one deck as a scenario. Bellas et al. [
21] used Pathfinder software to simulate the evacuation process of pedestrians in a warship and analyzed the effect of stair width on evacuation performance.
For cruise ships, it is common for family members to travel together, and so the behavior in a group evacuation should be considered. Some researchers have studied the differences between group and individual evacuations. Hu et al. [
22] took individuals and social groups composed of two pedestrians as the experimental subjects and carried out unidirectional movement experiments in a confined space. Bode et al. [
23] conducted an evacuation experiment on social groups of 12 pedestrians in a room with six exits; they found that the evacuation time increased when the social groups were in existence. By considering the impact of social group behavior on evacuation, an extended cellular automaton model was proposed by Lu et al. [
24], and their research showed that the negative effects of social group behavior during evacuation would intensify when the social group density increased. The walking mode of social groups had a significant impact on the evacuation process. Zhao et al. [
25] found that social groups that walked in the chain pattern had the highest evacuation efficiency compared with those that walked in the mixed pattern and line-abreast pattern. With the increased size of the social group, the decrease in the group walking speed is more obvious, and the deceleration of female walking speed is greater than that of males [
26]. However, gender and social relations had little influence on the group walking speed when the group went downstairs [
27]. Leaders of groups can play a certain role in the group evacuation process. Research by Turgut et al. [
28] showed that leader-centered behavior is superior to group-centered behavior in small group evacuation, and the number of leaders affects the evacuation. Haghani et al. [
29] found that the decision time of a social group during evacuation increases with the increase in the group size from an evacuation experiment. However, regardless of the group size, decisions were usually made by the group leader, and the leader would indicate the direction of movement to other members of the group.
In addition, the total evacuation time also increases with the group size [
30]. The groups also discussed the evacuation path, but the final decision to evacuate using the stairs or elevators was usually made by the leader [
31]. The evacuation is also often affected by the familiarity between individuals among groups. The experiment of Ma et al. [
32] showed that group behavior has a positive impact on evacuation if individuals are acquainted with each other. However, competitive behavior may occur when group members were unfamiliar with each other, and thus the movement speed of the group is decreased. Visibility can also affect the movement of groups. Xie et al. [
33] found that group behavior had a negative impact on evacuation under normal visibility. However, the situation in the case of the group under limited visibility is the opposite, where group behavior has a positive effect on evacuation. Based on considering the center of mass, shape and direction of the group, Krüchten et al. [
34] adopted the minimal ellipse to describe the shape, internal dynamics and movement characteristics of a group. Müller et al. [
35] extended the floor field cellular automaton model and added the group-specific floor fields into the model. They simulated the evacuation process of symmetric and asymmetric groups and studied the influence of groups’ interactions on evacuation dynamics.
From the above existing studies, group evacuation is different from individual evacuation, and it has a certain influence on the evacuation process. Moreover, as a dynamic process, the number of pedestrians arriving at the destination in each stage of evacuation is different. Tang et al. [
36] used uniform distribution to describe the interval time of passengers arriving at the check-in counter and simulated the arrival process and check-in of passengers through cellular automata. Postorino et al. [
37] analyzed the arrival time of different types of passengers based on Bar Coded Boarding Pass technology. Guo et al. [
38] established the waiting time model of transfer passengers according to their arrival rates. Kaparias et al. [
39] collected the data of passengers arriving at the platform by means of field counting and on-site interviews with passengers, and the collected data showed that the perceived and budgeted waiting times of passengers could be approximately fitted by a lognormal distribution or gamma distribution. Based on the passenger arrival information obtained from railway service tickets, Csikos et al. [
40] explored the daily consistency of passengers’ non-random behaviors in the morning commute. Measurement is one of the methods used to obtain the pedestrian arrival distribution, and the data accuracy is greatly affected by the measurement interval. Ye et al. [
41] analyzed the effect of different time measurement intervals on hourly flow rate stability and proposed a method to quantitatively calculate the optimal measurement interval of the pedestrian traffic flow model. As for the measurement method of pedestrian density, Das et al. [
42] found that 15 or 30 s was the best measurement interval for variance analysis for pedestrian flow data on the sidewalk. For bus passengers with random arrivals, Kieu et al. [
43] proposed the collective non-homogeneous Poisson process (cNHPP) to simulate the arrival process of passengers. The computing time of this method was short, and it could construct the arrival process using fewer time regions compared with the homogeneous Poisson process (HPP). Based on analyzing the data of passengers arriving randomly and non-randomly, Ingvardson et al. [
44] proposed a general modeling method to describe passenger waiting time by means of uniform distribution and beta distribution. Luethi et al. [
45] surveyed the data of 28 public transport facilities in the Zurich area and constructed the passenger arrival distribution model for the timetable-independent and the timetable-dependent arrival of passengers.
It can be seen from the above that scholars have carried out relevant studies on ship evacuation, group evacuation, and pedestrian arrival rules, respectively. However, there are different types of passengers on a ship, and their characteristics and behavior will have different impacts on evacuation. Therefore, this paper mainly analyzes the evacuation process by combining the behavior of passengers (in individual and group mode) and the characteristics of passengers (speed, response time, initial position, etc.).
In addition, evacuation planning is also one of the ways to keep people safe. Evacuation planning establishes a complete emergency plan from a macro point of view. Planning can avoid or minimize the impact of emergencies by building a safe and sustainable environment. The planning approach helps to reduce risks and enhance emergency preparedness through exercises [
46]. However, the stay time of passengers on the ship is short, and there is a lack of adequate exercise opportunities. Hence, this paper mainly uses simulation methods to analyze the evacuation process of different types of passengers on cruise ships and explore potential ways to improve evacuation efficiency.
The main contributions in this paper are as follows. Firstly, the evacuation scenarios under the action of individuals and groups are established, and the waiting behavior is added to group evacuation. Secondly, the arrival time distributions of passengers are obtained by simulating the evacuation process of passengers. Finally, the effects of passenger type, walking speed, and initial position on evacuation time are analyzed, and we explore potential methods to improve evacuation efficiency.
The rest of this paper is as follows.
Section 2 presents the description of the research problems. The simulation model is established in
Section 3. In
Section 4, simulation results are discussed. The last section presents the conclusions and future works.
3. The Construction of Simulation Model
The evacuation of pedestrians is a dynamic process, and this process is usually simulated by establishing evacuation models. The Cellular Automata model [
51], Lattice-gas automata model [
52], Multi-Grid model [
53], and Social Force model [
54] are common models used by researchers. The social force model is based on Newtonian force. This model assumes that pedestrians have reaction behavior to the outside world, and the force on pedestrians can be represented by force vectors. AnyLogic [
55] is software based on the social force model, and it is a widely used tool for the modeling and simulation of evacuation [
56,
57,
58]. This software provides a wide variety of application programming interfaces (APIs), and special parameters and function bodies can be defined by users according to the simulation needs.
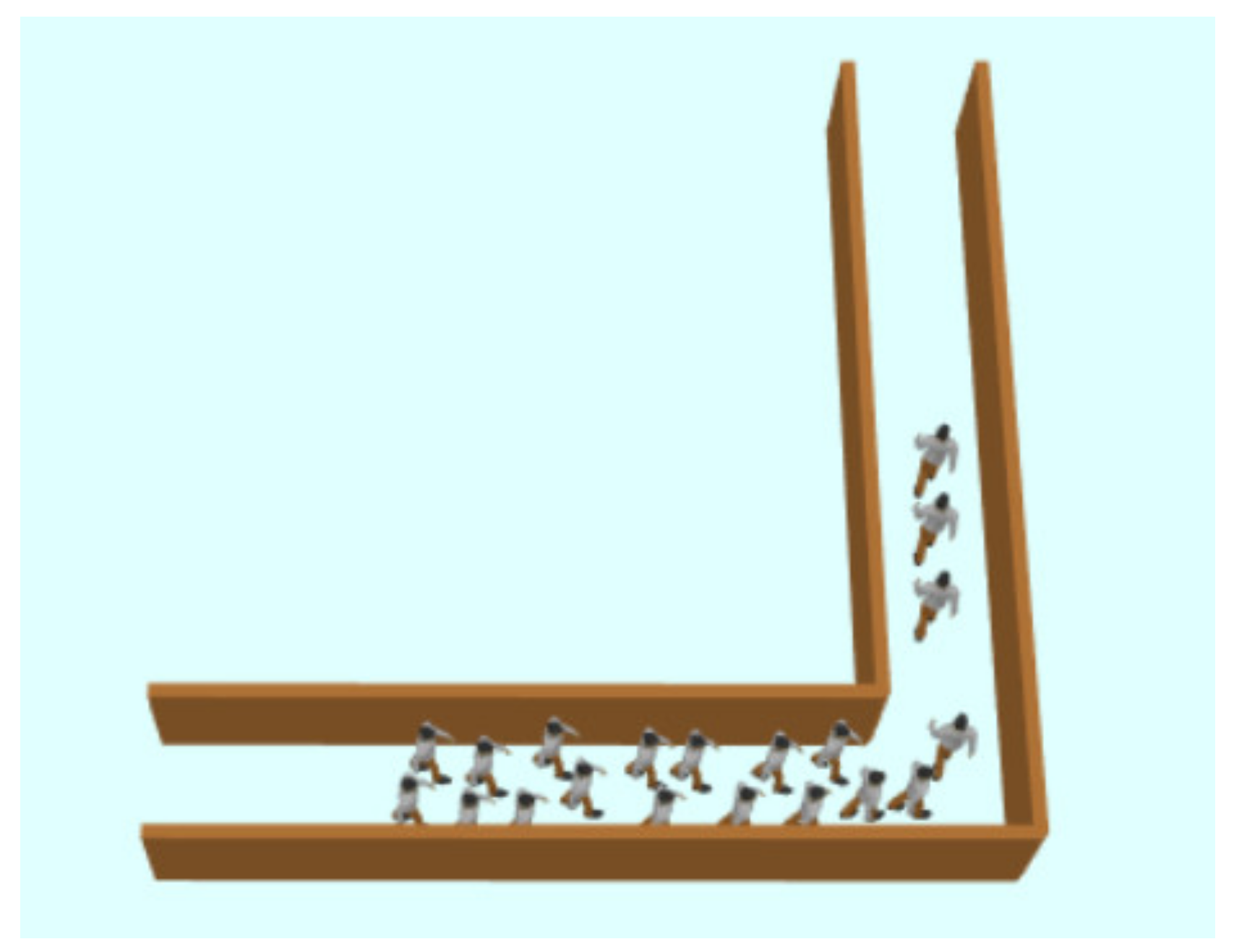
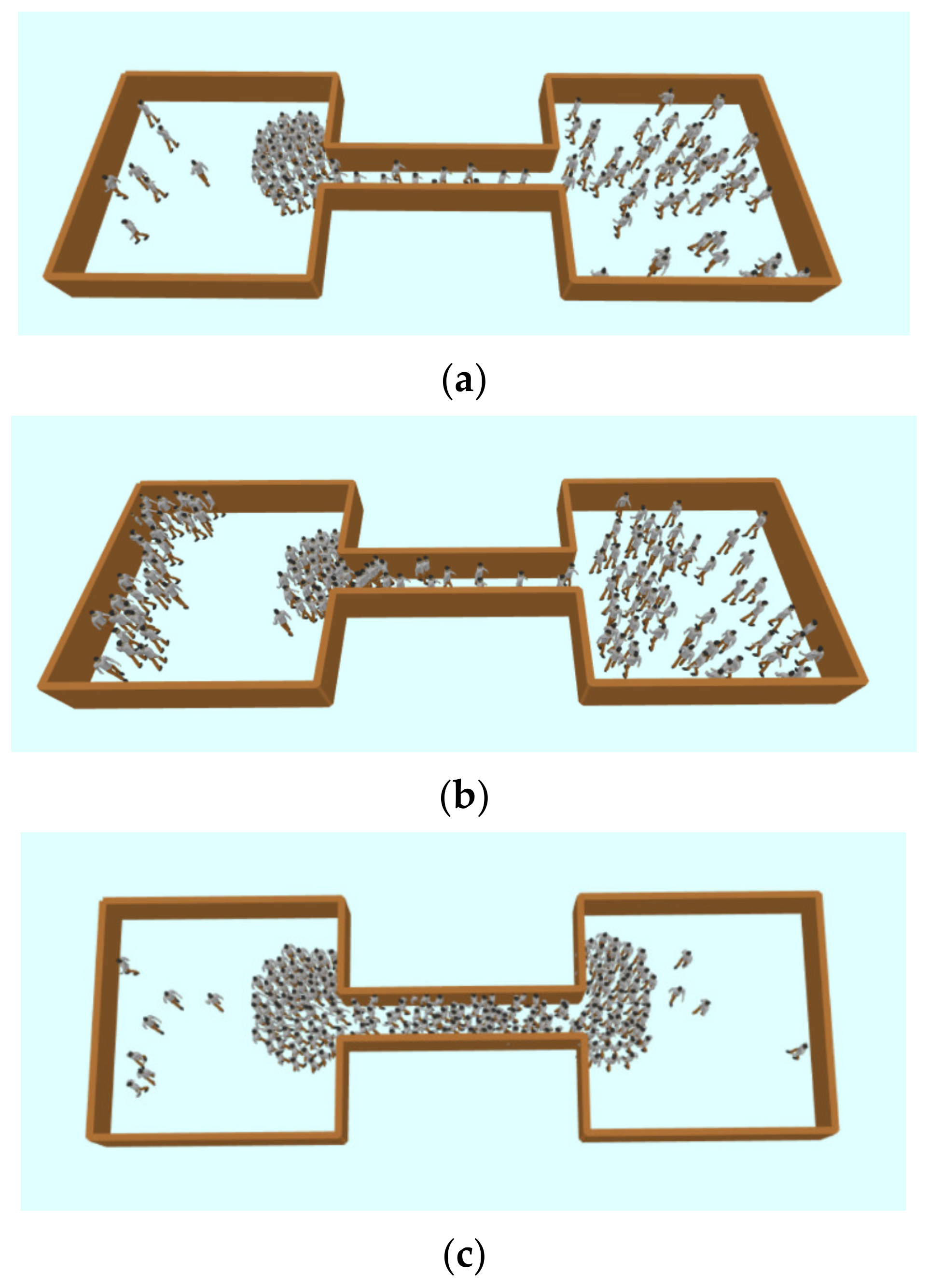
In order to verify whether the software is suitable for evacuation simulation, the verification scenarios [
47] specified in the IMO Guidelines are used to test the AnyLogic software.
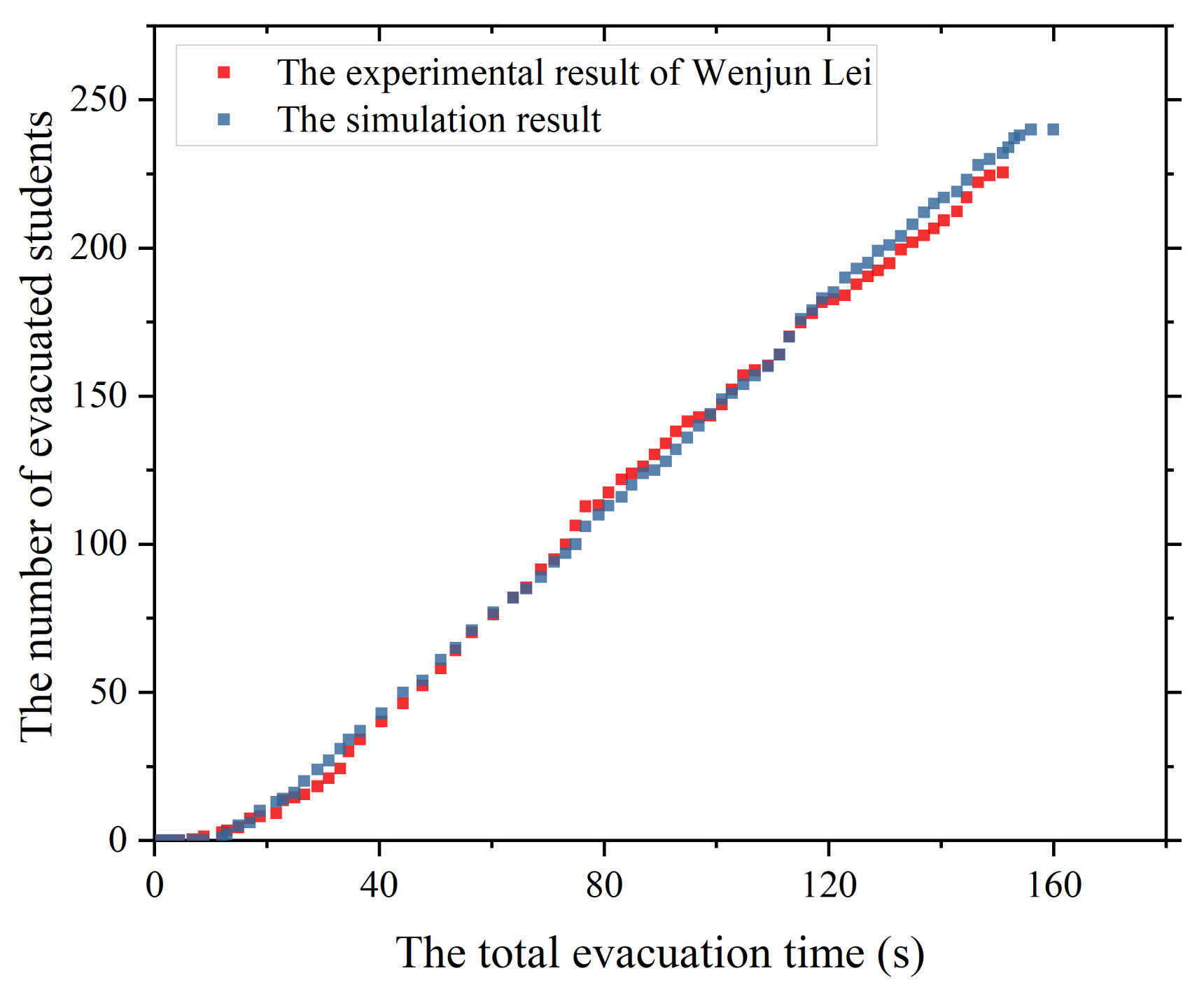
Appendix A is the test result, which shows that AnyLogic meets the test requirements of all scenarios. In addition, we also built a model based on the experimental scenario of the previous research [
59] and simulated the scenario using AnyLogic. The details of this simulation can be seen in
Appendix B. The simulation result is very close to the experimental result of the previous research. The results of two tests show that AnyLogic can be suitable for evacuation simulation. Therefore, this study used the AnyLogic software to establish the evacuation scenarios and to simulate evacuation processes.
3.1. The Construction of Evacuation Space Models
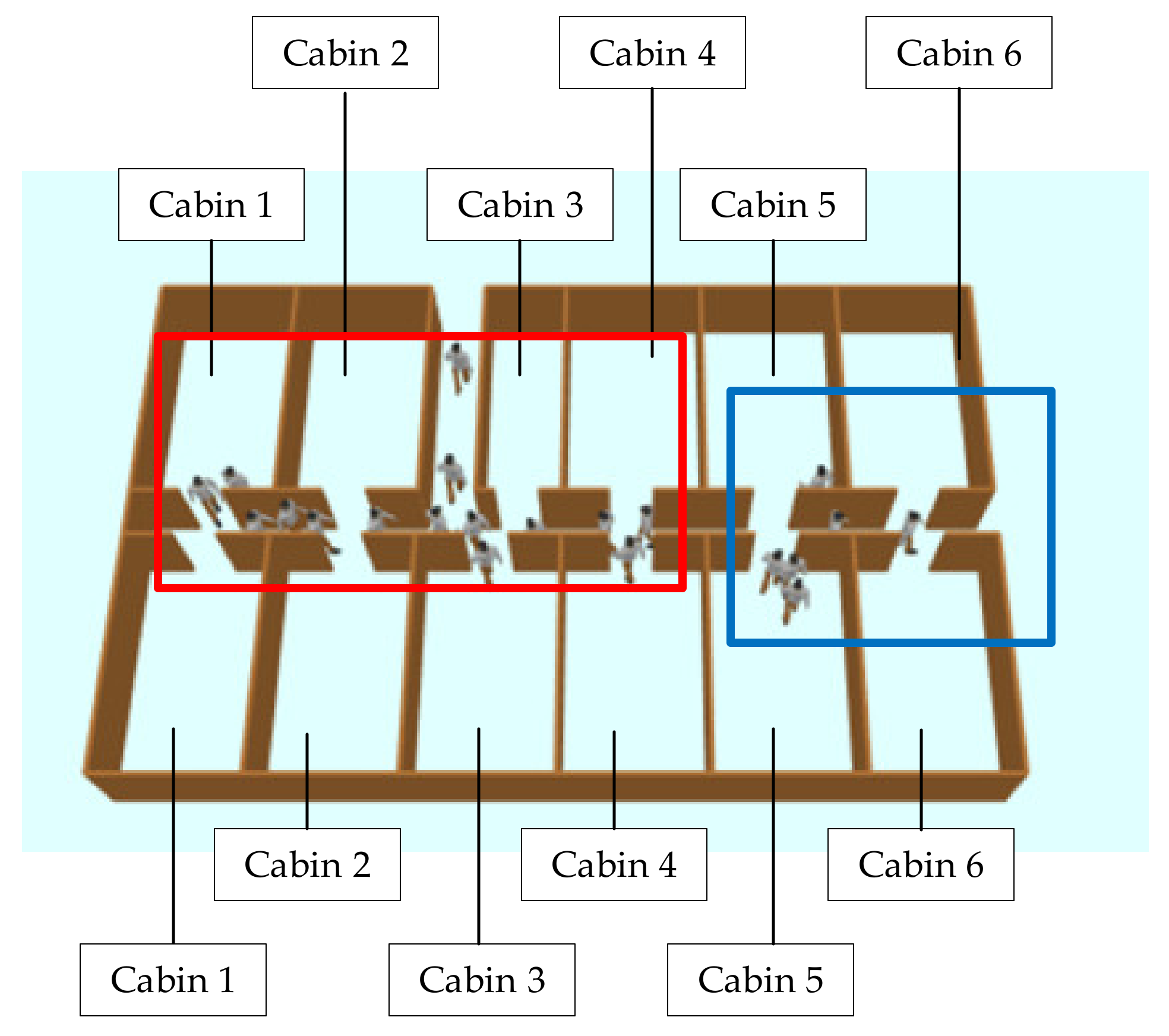
The evacuation space mainly includes planar and vertical spaces composed of decks and staircases, respectively. The deck model can be built according to the deck layout, and the space model of Deck 2 is shown in
Figure 6. For furniture that exists in space, such as fixed tables, cabinets, and bar counters, the wall module of the software can be used to simulate this furniture to form boundaries. These boundaries are used to simulate obstacles in scenarios, and passengers cannot cross these boundaries during the simulation process. The final destinations of evacuation are the embarkation stations, which are two areas near the lifeboats on both sides of Deck 2, as shown in
Figure 6.
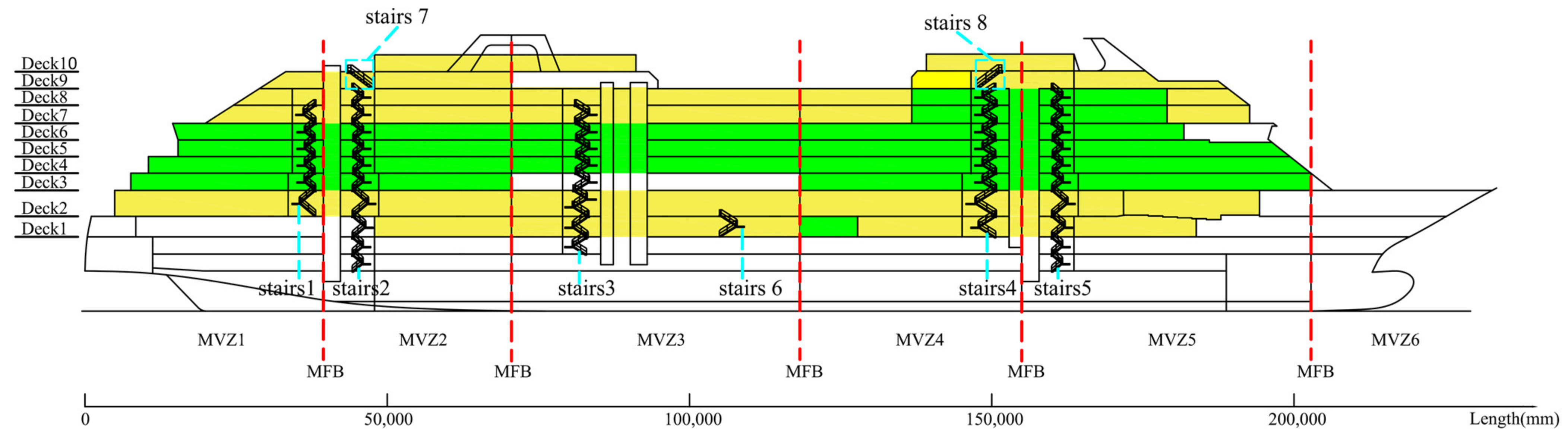
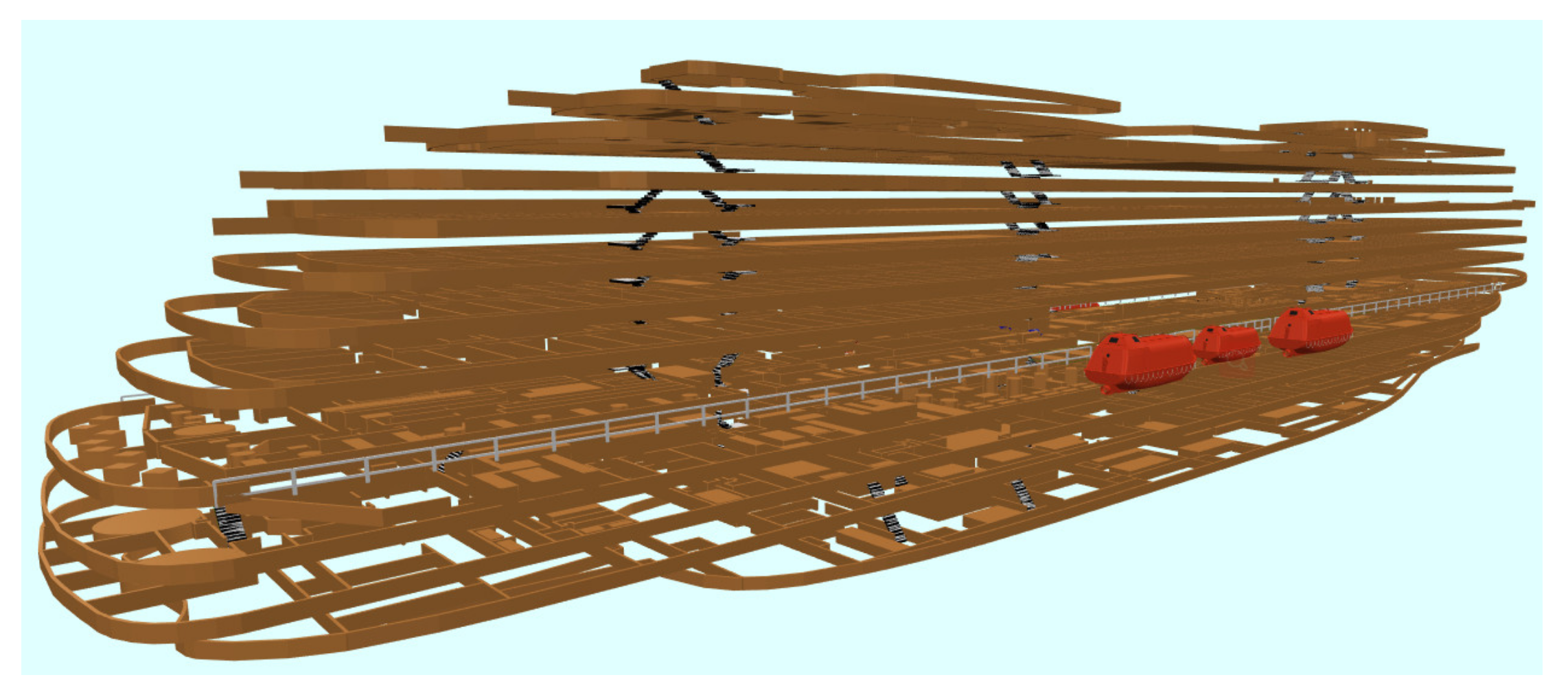
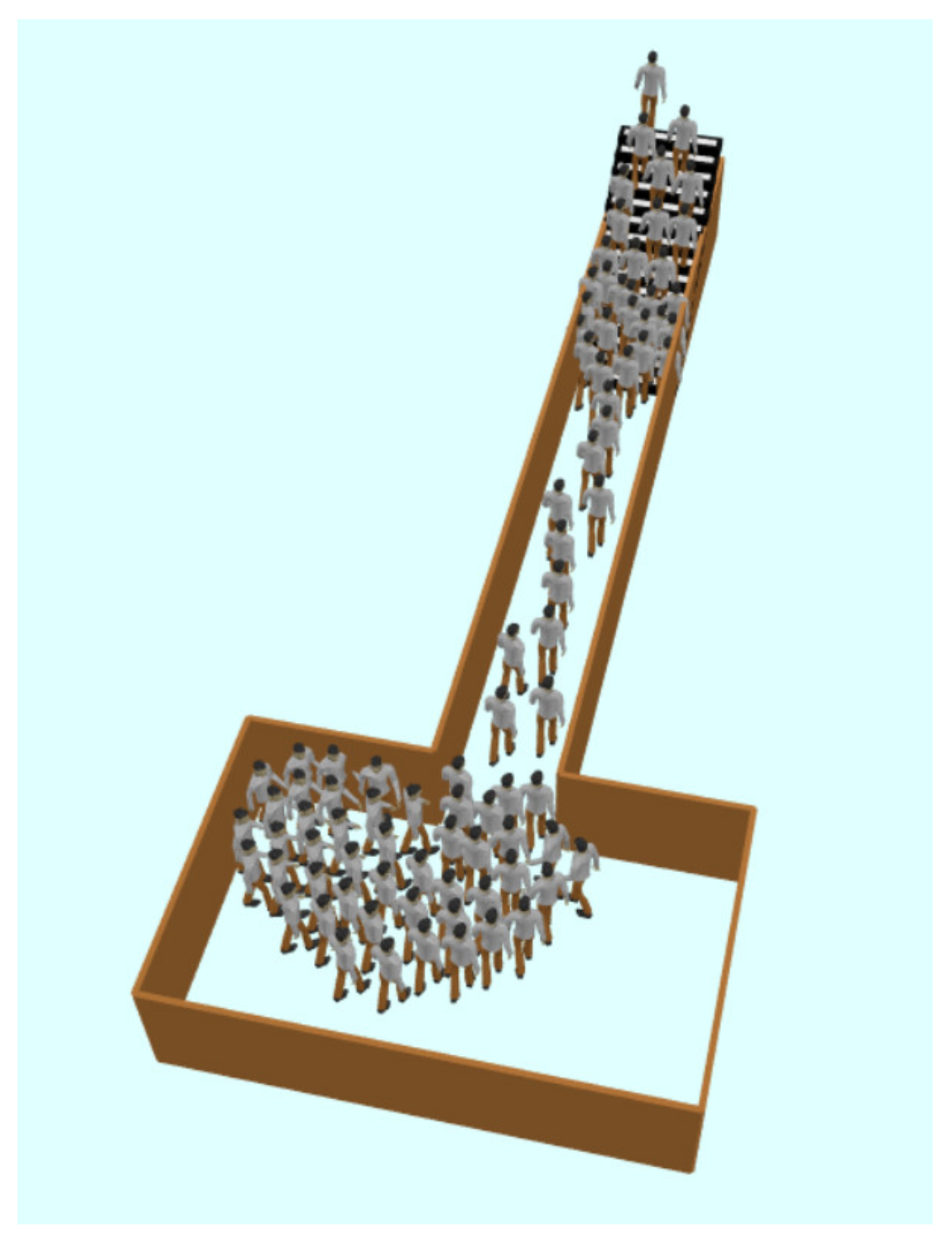
Figure 7 shows the established space model of the cruise ship, and decks in the model are connected by staircases. In the process of evacuation, passengers on other decks arrive at Deck 2 through staircases. The detailed spatial model and annotations of Decks 1–10 can be seen in
Figure A13 and
Table A2 of
Appendix C.
3.2. The Construction of Passenger Model
The Analogic software can define a class of groups with similar attributes by establishing an agent. Due to different types of passengers having different walking speeds and proportions, attributes of passengers can be set by establishing a passenger agent. Java can be used to write programs to realize the functions needed in the simulation process in the software.
Figure 8 shows items defined in the passenger agent. The items in the red box, the green box, and the blue box are parameters, variables, and functions of the passenger agent, respectively. A detailed description of each item can be found in
Table A3 of
Appendix C. The defined functions can be called in the process of evacuation simulation to realize the corresponding functions.
3.3. The Simulation Process
After the cruise ship evacuation space and passenger agent are established, the behavior of passenger evacuation can be set through the Process Modeling Library in the software. Each process module includes interfaces that functions can be called.
Figure 9 shows the simulation process of passenger evacuation, which includes the following steps.
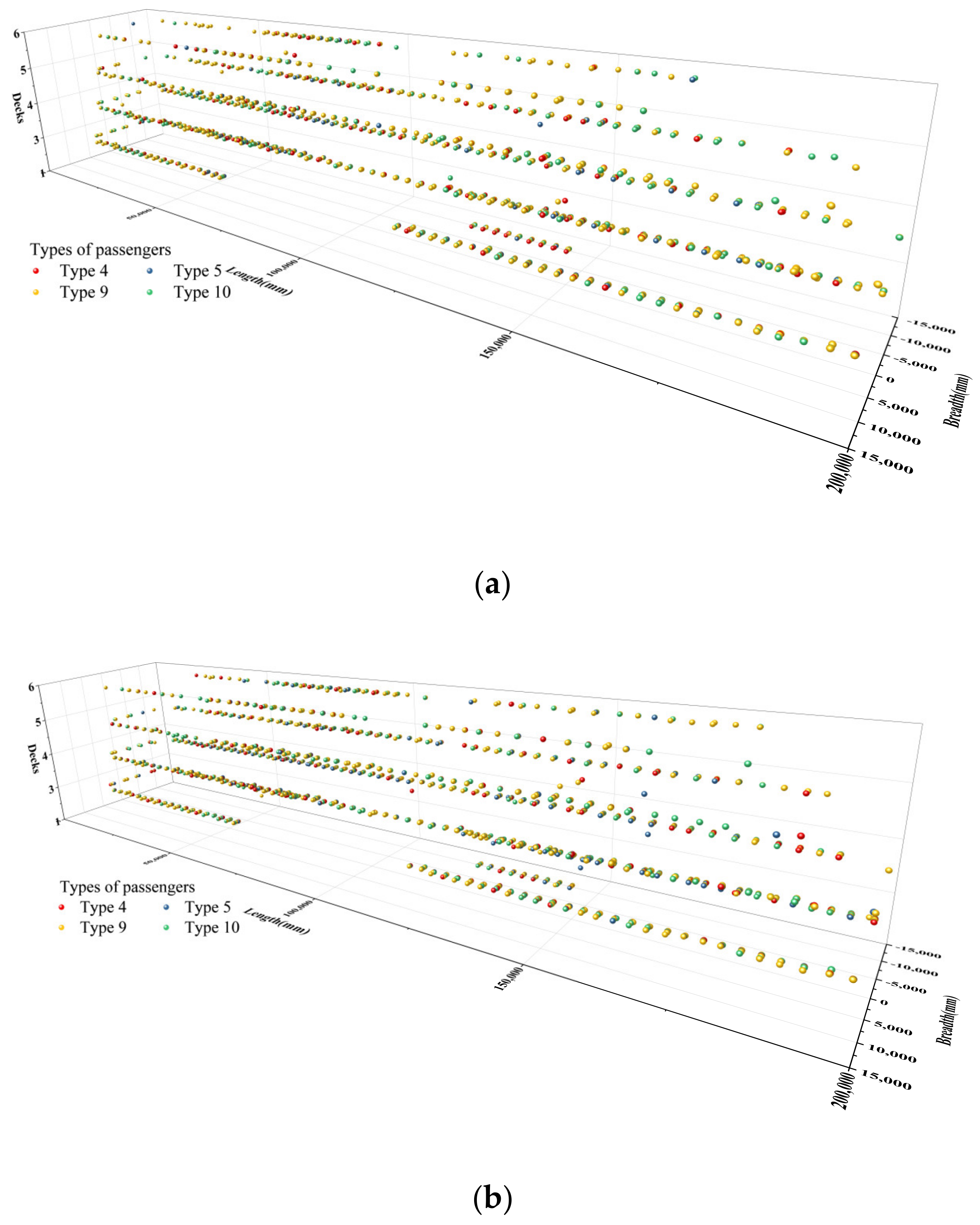
Step 1: Define four evacuation scenarios and determine the spatial distribution of passengers in each scenario.
Step 2: By selecting different evacuation scenarios, passenger models are prepared to be loaded into the space model.
Step 3: Call functions in the passenger agent to initialize passenger models, allocate proportions of different types of passengers, and assign the ID and type for each passenger.
Step 4: When the passenger is loaded into the space model, the corresponding walking speed is set based on the type of the passenger. The initial coordinates, deck, and MVZ can be obtained according to the initial position of the passenger.
Step 5: If the initial location of the passenger is on Deck 2, the passenger directly moves towards the embarkation stations. If the initial location is not on Deck 2, go to step 6.
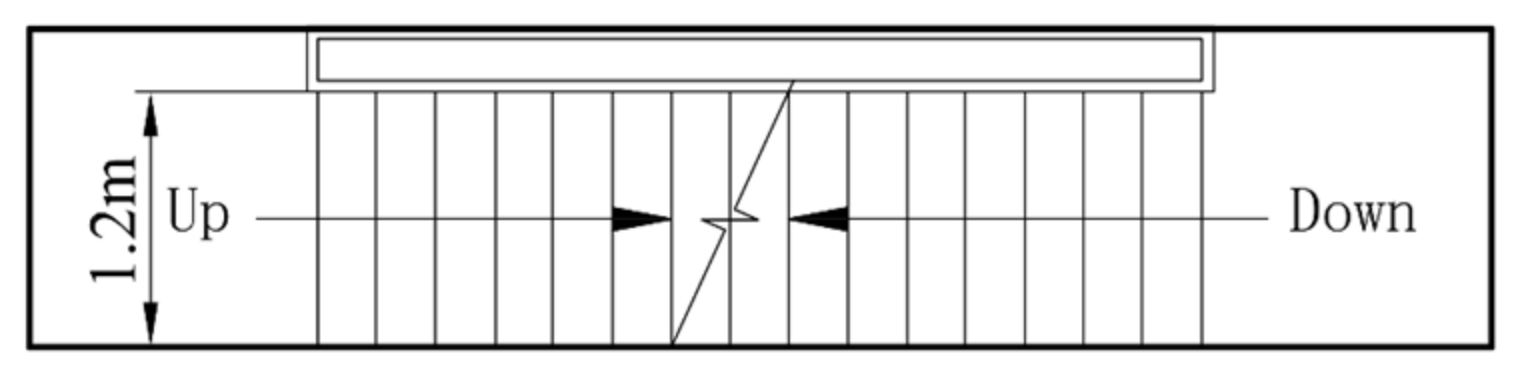
Step 6: Call Find_Location_Line function, causing passengers to turn into the pathfinding mode, and passengers will move towards nearest staircases.
Step 7: When the passenger enters the staircase, if the current location of the passenger is above Deck 2, the passenger will go downstairs from the current deck. Meanwhile, the walking speed of the passenger will be reset by the SetPedSpeed_StairsDown_min and SetPedSpeed_StairsDown_max functions. If the current location of the passenger is below Deck 2, the passenger will go upstairs from the current deck. The walking speed of the passenger will be reset by setPedSpeed_StairsUp_min and setPedSpeed_StairsUp_max functions.
Step 8: When the passenger arrives at another deck by the staircase, the walking speed of the passenger will be reset by the setPedSpeed_min and setPedSpeed_max functions. Then, the passenger checks whether the current deck is Deck 2 or not. If the current deck is not Deck 2, go to step 6. If the current deck is Deck 2, the passenger will move towards the embarkation stations.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


















