
Outlier Reconstruction of NDVI for Vegetation-Cover Dynamic Analyses


Abstract
:1. Introduction
2. Materials and Methods
2.1. Datasets
2.2. Methods
2.2.1. Data Representation
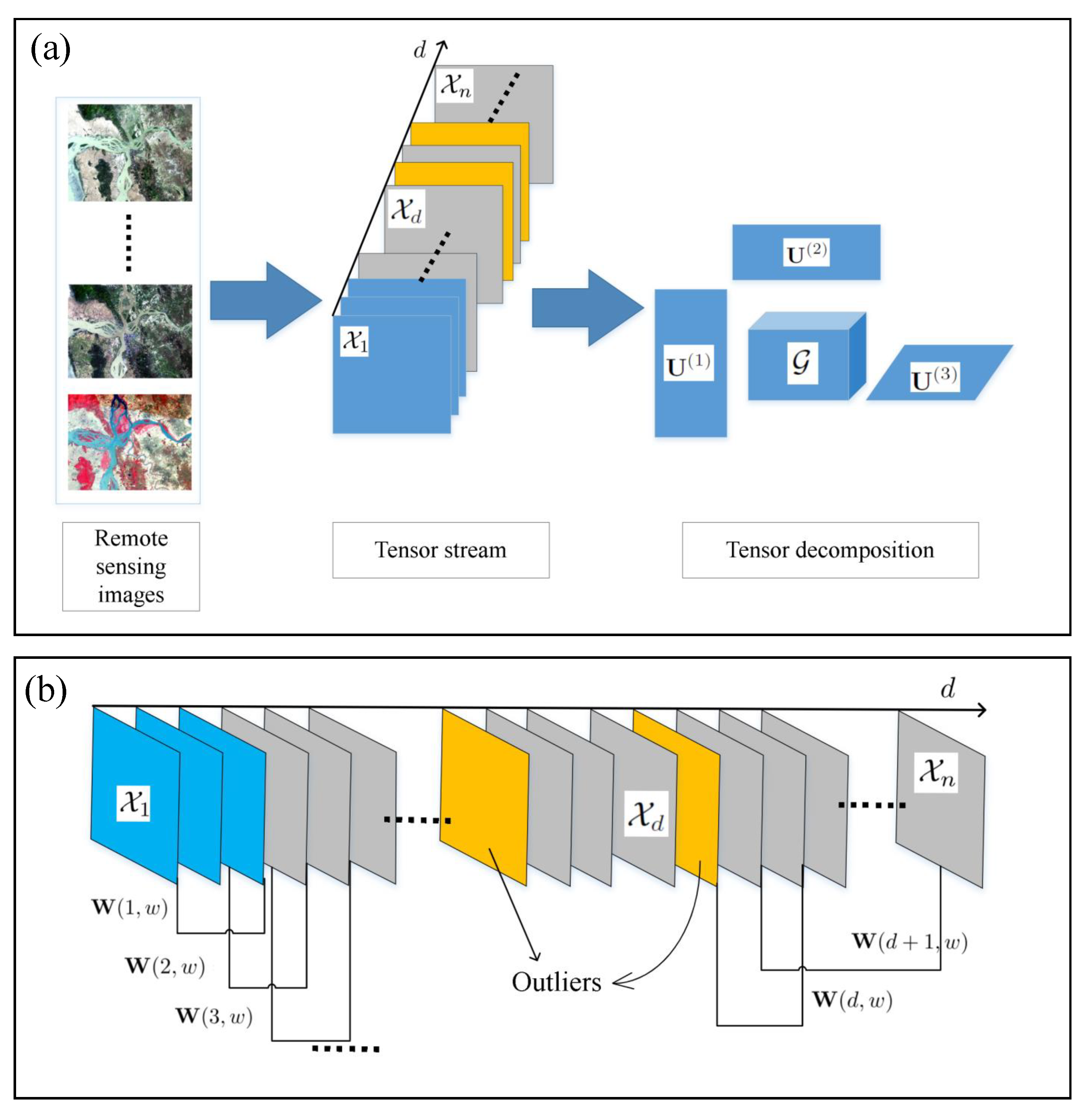
2.2.2. Tensor Construction
2.2.3. Tensor Stream
2.2.4. Tensor Decomposition
2.2.5. Sliding-Window-Based Tensor Stream Analysis Algorithm (SWTSA)
- Step 1: Decomposition. Tensor is decomposed on the basis of a given window. This step can be implemented with the following operations:
- (i)
- Extract a tensor from tensor stream at the position on the window size.
- (ii)
- Tensor is decomposed with the methods in Section 2.2.4.
- Step 2: Reconstrution. An approximate tensor could be reconstructed on the basis of and at a new window . This step involves the following steps:
- (i)
- Reconstruction of according to .
- (ii)
- Calculation of a reconstruction error .
- (iii)
- If is unsatisfied, Step 1 is repeated with reassigned , otherwise, window position slides from d to . Parameter d represents the current position of the sliding window.
| Algorithm 1 Sliding-window-based tensor stream analysis algorithm (SWTSA) |
| Input: Tensor stream , window size w, core tensor ranks , , , . |
| Output:, , and . |
|
2.2.6. Performance Evaluation Metrics
3. Results
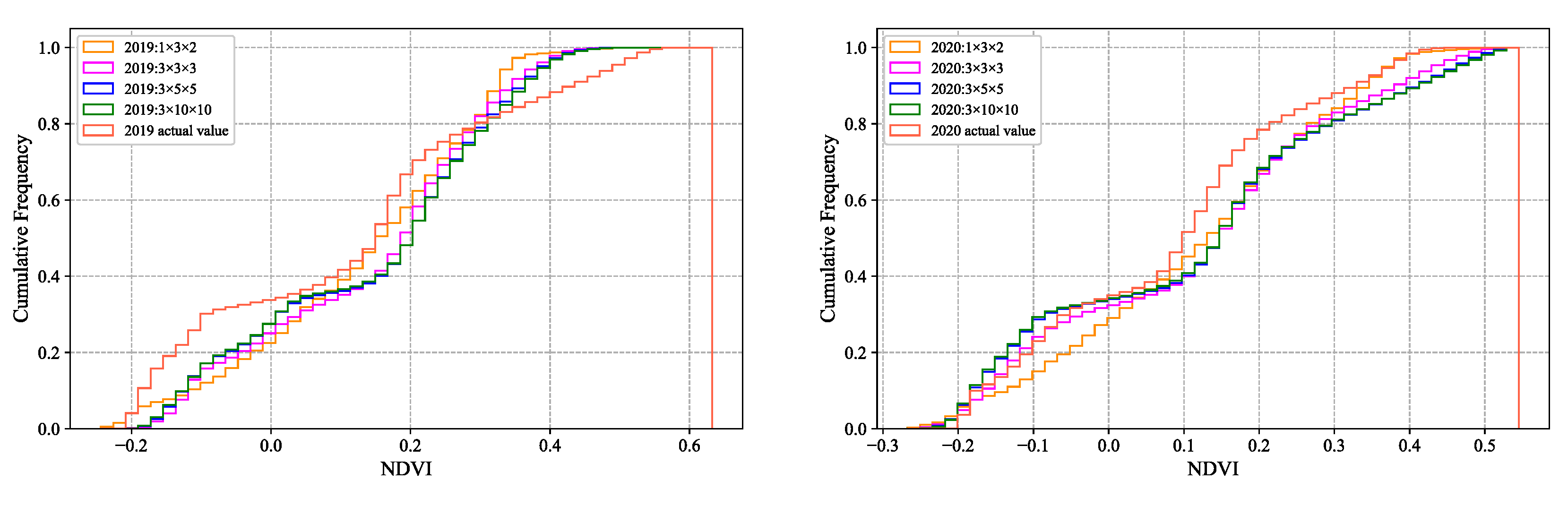
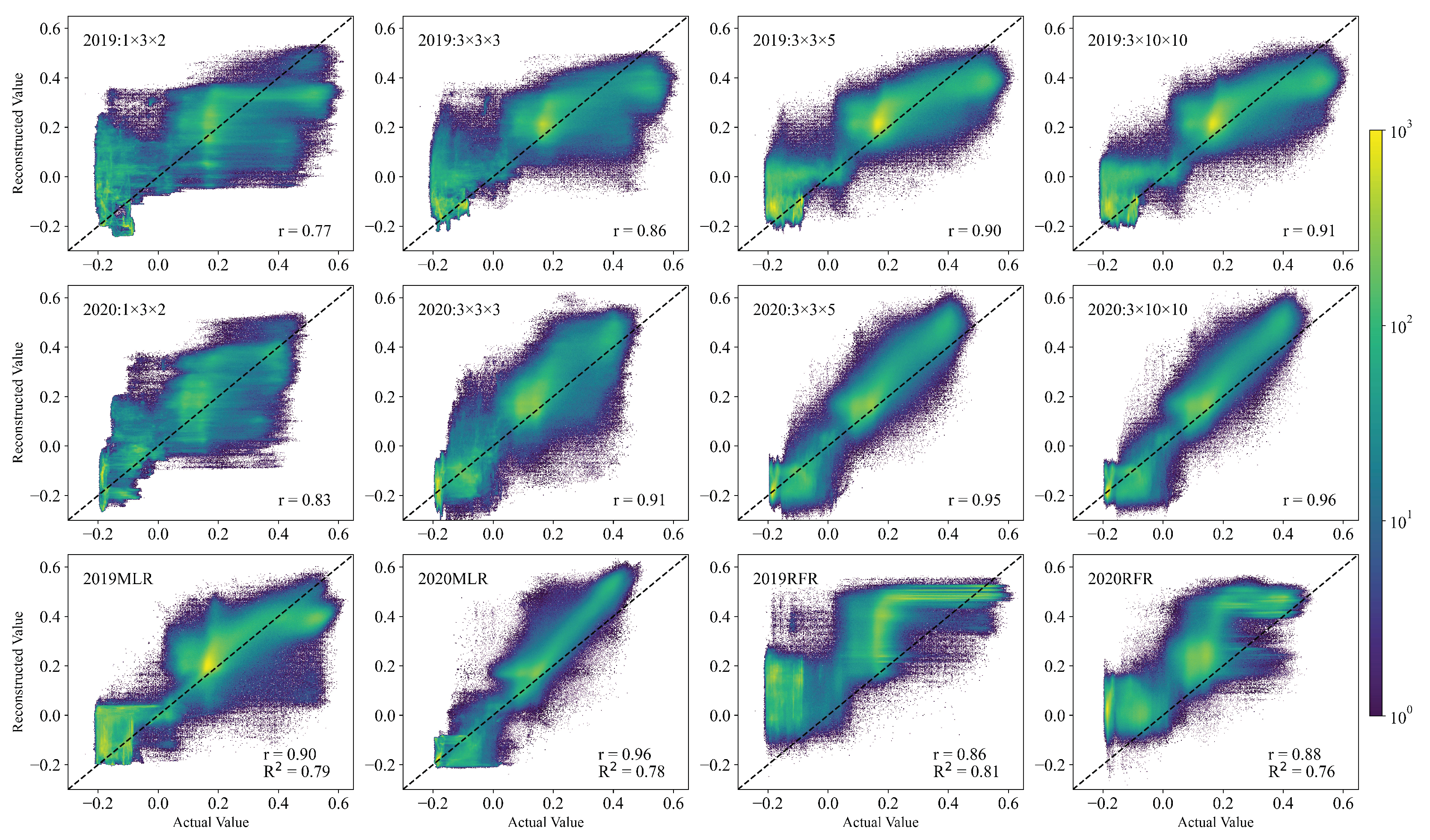
3.1. Analysis of Reconstructed Results
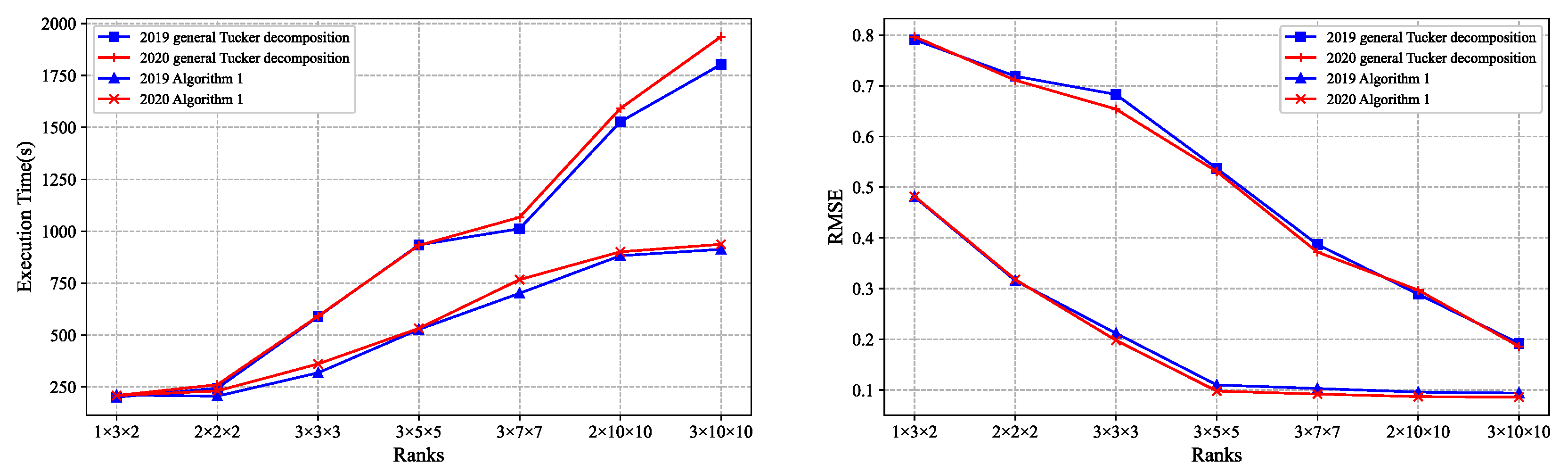
3.2. Evaluation the Performance of SWTSA
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Forkel, M.; Carvalhais, N.; Rödenbeck, C.; Keeling, R.; Heimann, M.; Thonicke, K.; Zaehle, S.; Reichstein, M. Enhanced seasonal CO2 exchange caused by amplified plant productivity in northern ecosystems. Science 2016, 12, 696–699. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jia, K.; Yang, L.; Liang, S.; Xiao, Z.; Zhao, X.; Yao, Y.; Zhang, X.; Jiang, B.; Liu, D. Long-Term Global Land Surface Satellite (GLASS) Fractional Vegetation Cover Product Derived From MODIS and AVHRR Data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 508–518. [Google Scholar] [CrossRef]
- Cornejo, D.; Jose, R.; Hartfield, K.; Willem, L.; Ponce, E.; Castellanos, A. Landscape Dynamics in an Iconic Watershed of Northwestern Mexico: Vegetation Condition Insights Using Landsat and PlanetScope Data. Remote Sens. 2020, 12, 2519. [Google Scholar] [CrossRef]
- Hantson, S.; Huxman, T.E.; Kimball, S.; Randerson, J.T.; Gould E, M.L. Warming as a Driver of Vegetation Loss in the Sonoran Desert of California. J. Geophys. Res. 2021, 126, e2020JG005942. [Google Scholar] [CrossRef]
- Lasaponara, R. Estimating Interannual Variations in Vegetated Areas of Sardinia Island Using SPOT/VEGETATION NDVI Temporal Series. IEEE Geosci. Remote Sens. Lett. 2006, 3, 481–483. [Google Scholar] [CrossRef]
- Revuelta-Acosta, J.D.; Guerrero-Luis, E.S.; Terrazas-Rodriguez, J.E.; Gomez-Rodriguez, C.; Alcalá Perea, G. Application of Remote Sensing Tools to Assess the Land Use and Land Cover Change in Coatzacoalcos, Veracruz, Mexico. Appl. Sci. 2022, 12, 1882. [Google Scholar] [CrossRef]
- Chiang, Y.; Chen, K. Multi-scale analysis of vegetation dynamics from satellite images. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, Australia, 21–26 July 2013; pp. 3923–3926. [Google Scholar]
- Bashir, B.; Cao, C.; Naeem, S.; Zamani, J.; Bo, X.; Afzal, H.; Jamal, K.; Mumtaz, F. Spatio-Temporal Vegetation Dynamic and Persistence under Climatic and Anthropogenic Factors. Remote Sens. 2020, 16, 2612. [Google Scholar] [CrossRef]
- Ma, L.; Zhou, Y.; Chen, J. Estimation of Fractional Vegetation Cover in Semiarid Areas by Integrating Endmember Reflectance Purification Into Nonlinear Spectral Mixture Analysis. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1175–1179. [Google Scholar]
- Rodrigues, A.; Marcal, A.; Cunha, M. Monitoring Vegetation Dynamics Inferred by Satellite Data Using the PhenoSat Tool. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2096–2104. [Google Scholar] [CrossRef]
- Bignami, C.; Chini, M.; Amici, S.; Trasatti, E. Synergic Use of Multi-Sensor Satellite Data for Volcanic Hazards Monitoring: The Fogo (Cape Verde) 2014–2015 Effusive Eruption. Front. Earth Sci. 2020, 8, 22. [Google Scholar] [CrossRef] [Green Version]
- Holmlund, K.; Grandell, J.; Schmetz, J.; Stuhlmann, R.; Bojkov, B.; Munro, R.; Lekouara, M.; Coppens, D.; Viticchie, B.; August, T.; et al. Meteosat Third Generation (MTG): Continuation and Innovation of Observations from Geostationary Orbit. Bull. Am. Meteorol. Soc. 2021, 102, 990–1015. [Google Scholar] [CrossRef]
- Ghosh, A.; Pal N., R.; Das, J. A fuzzy rule based approach to cloud cover estimation. Remote Sens. Environ. 2006, 100, 531–549. [Google Scholar] [CrossRef]
- Wang, Y.; Li, R.; Hu, J.; Wang, X.; Wang, Y. Evaluations of MODIS and microwave-based satellite evapotranspiration products under varied cloud conditions over east Asia forests. Remote Sens. Environ. 2021, 264, 112606. [Google Scholar] [CrossRef]
- Domnich, M.; Sünter, I.; Trofimov, H.; Wold, O.; Harun, F.; Kostiukhin, A.; Järveoja, M.; Veske, M.; Tamm, T.; Voormansik, K.; et al. KappaMask: AI-Based Cloudmask Processor for Sentinel-2. Remote Sens. 2021, 13, 4100. [Google Scholar] [CrossRef]
- Pablo Arroyo-Mora, J.; Kalacska, M.; Trond Løke, D.; Nicholas, C.; Coops, L.; George, L. Assessing the impact of illumination on UAV push broom hyperspectral imagery collected under various cloud cover conditions. Remote Sens. Environ. 2021, 258, 112396. [Google Scholar] [CrossRef]
- Whitcraft, A.K.; Vermote, E.F.; Becker-Reshef, I.; Justice, C.O. Cloud cover throughout the agricultural growing season: Impacts on passive optical earth observations. Remote Sens. Environ. 2015, 156, 438–447. [Google Scholar] [CrossRef]
- Stathopoulos, S.; Tsonis, A.; Kourtidis, K. On the cause-and-effect relations between aerosols, water vapor, and clouds over East Asia. Theor. Appl. Climatol. 2021, 144, 711–722. [Google Scholar] [CrossRef]
- Dirk, T.; Martin, S.; Hannah, A.; Andrea, B. Investigating ESA Sentinel-2 products’ systematic cloud cover overestimation in very high-altitude areas. Remote Sens. Environ. 2021, 252, 112163. [Google Scholar]
- Mo, Y.; Xu, Y.; Chen, H.; Zhu, S. A Review of Reconstructing Remotely Sensed Land Surface Temperature under Cloudy Conditions. Remote Sens. 2021, 13, 2838. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, S.; Wu, T.; Feng, L.; Wu, W.; Luo, J.; Zhang, X.; Yan, N. For-backward LSTM-based missing data reconstruction for time-series Landsat images. GIsci. Remote Sens. 2022, 59, 410–430. [Google Scholar] [CrossRef]
- Wu, P.; Yin, Z.; Yang, H.; Wu, Y.; Ma, X. Reconstructing Geostationary Satellite Land Surface Temperature Imagery Based on a Multiscale Feature Connected Convolutional Neural Network. Remote Sens. 2019, 11, 300. [Google Scholar] [CrossRef] [Green Version]
- Zhao, W.; Duan, S. Reconstruction of daytime land surface temperatures under cloud-covered conditions using integrated MODIS/Terra land products and MSG geostationary satellite data. Remote Sens. Environ. 2020, 247, 111931. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E.; Holden, C.; Yang, Z.Q. Generating synthetic Landsat images based on all available Landsat data: Predicting Landsat surface reflectance at any given time. Remote Sens. Environ. 2015, 162, 67–83. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Mutanga, O.; Adam, E.; Cho, M.A. High density biomass estimation for wetland vegetation using WorldView-2 imagery and random forest regression algorithm. Int. J. Appl. Earth Obs. Geoinf. 2012, 18, 399–406. [Google Scholar] [CrossRef]
- Ghamisi, P.; Rasti, B.; Yokoya, N.; Wang, Q.; Hofle, B.; Bruzzone, L.; Bovolo, F.; Chi, M.; Anders, K.; Gloaguen, R.; et al. Multisource and multitemporal data fusion in remote sensing: A comprehensive review of the state-of-the-art. IEEE Geosci. Remote Sens. Mag. 2019, 7, 6–39. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Zhou, G.; Huang, Z.; Zhao, Q.; Xie, S. Efficient Tensor Robust PCA Under Hybrid Model of Tucker and Tensor Train. IEEE Signal Process Lett. 2022, 29, 627–631. [Google Scholar] [CrossRef]
- Wu, F.; Li, Y.; Li, C.; Wu, Y. A Fast Tensor Completion Method Based on Tensor QR Decomposition and Tensor Nuclear Norm Minimization. IEEE Trans. Comput. Imaging 2021, 7, 1267–1277. [Google Scholar] [CrossRef]
- Du, A.; Cheng, S.; Wang, L. Low-Rank Semantic Feature Reconstruction Hashing for Remote Sensing Retrieval,IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar]
- Ludwig, M.; Morgenthal, T.; Detsch, F. Machine learning and multi-sensor based modelling of woody vegetation in the Molopo Area, South Africa. Remote Sens. Environ. 2019, 22, 195–203. [Google Scholar] [CrossRef]
- Rouse, W.; Haas, R.; Schell, A. Monitoring Vegetation Systems in the Great Plains with ERTS. In Proceedings of the Third ERTS Symposium, Washington, DC, USA, 10–14 December 1973; pp. 309–317. [Google Scholar]
- Yunus, A.; Fan, X.; Tang, X. Decadal vegetation succession from MODIS reveals the spatio-temporal evolution of post-seismic landsliding after the 2008 Wenchuan earthquake. Remote Sens. Environ. 2020, 236, 111476. [Google Scholar] [CrossRef]
- Grill, G.; Lehner, B.; Thieme, M.; Geenen, B.; Tickner, D.; Antonelli, F.; Babu, S.; Borrelli, P.; Cheng, L.; Crochetiere, H.; et al. Mapping the world’s free-flowing rivers. Nature 2019, 569, 215–221. [Google Scholar] [CrossRef] [PubMed]
- Vermote, E.; Justice, C.; Claverie, M. Preliminary analysis of the performance of the Landsat 8/OLI land surface reflectance product. Remote Sens. Environ. 2016, 185, 46–56. [Google Scholar] [CrossRef] [PubMed]
- USGS. Available online: https://www.usgs.gov/landsat-missions/using-usgs-landsat-level-1-data-product (accessed on 8 March 2022).
- Méger, N.; Rigotti, C.; Pothier, C. Ranking evolution maps for Satellite Image Time Series exploration: Application to crustal deformation and environmental monitoring. Data Min. Knowl. Discov. 2019, 33, 131–167. [Google Scholar] [CrossRef] [Green Version]
- Cui, L.; Zhao, Y.; Liu, J.; Wang, H.; Han, L.; Li, J.; Sun, Z. Vegetation Coverage Prediction for the Qinling Mountains Using the CA–Markov Model. ISPRS Int. J. Geo-Inf. 2021, 10, 679. [Google Scholar] [CrossRef]
- Geng, L.; Ma, M.; Yu, W. Validation of the MODIS NDVI Products in Different Land-Use Types Using In Situ Measurements in the Heihe River Basin. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1649–1653. [Google Scholar] [CrossRef]
- Kolda, T.; Bader, B. Tensor Decompositions and Applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Hached, M.; Jbilou, K.; Koukouvinos, C.; Mitrouli, M. A Multidimensional Principal Component Analysis via the C-Product Golub–Kahan–SVD for Classification and Face Recognition. Mathematics 2021, 9, 1249. [Google Scholar] [CrossRef]
- Sun, J.; Papadimitriou, S.; Yu, P. Window-based Tensor Analysis on High-dimensional and Multi-aspect Streams. In Proceedings of the Sixth International Conference on Data Mining, Hong Kong, China, 18–26 December 2006, ICDM’06; pp. 1076–1080.
- Papalexakis, E.; Faloutsos, C.; Sidiropoulos, N. Tensors for Data Mining and Data Fusion: Models, Applications, and Scalable Algorithms. ACM Trans. Intell. Syst. Technol. 2016, 8, 1–44. [Google Scholar] [CrossRef] [Green Version]
- Tucker, L. Some mathematical notes on three-mode factor analysis. Psychometrika 1966, 31, 279–311. [Google Scholar] [CrossRef]
- Sun, J.; Tao, D.; Papadimitriou, S. Incremental tensor analysis: Theory and applications. ACM Trans. Knowl. Discov. Data 2008, 2, 1–37. [Google Scholar] [CrossRef]
- Zhou, L.; Du, G.; Wang, R.; Tao, D.; Wang, L.; Cheng, J.; Wang, J. A tensor framework for geosensor data forecasting of significant societal events. Pattern Recognit. 2019, 88, 27–37. [Google Scholar] [CrossRef]
- Papalexakis, E.; Sidiropoulos, N.; Bro, R. From K-Means to Higher-Way Co-Clustering: Multilinear Decomposition with Sparse Latent Factors. IEEE Trans. Signal Process. 2013, 6, 493–506. [Google Scholar] [CrossRef]
- Ramos-Bernal, R.N.; Vázquez-Jiménez, R.; Cantú-Ramírez, C.A.; Alarcón-Paredes, A.; Alonso-Silverio, G.A.; Bruzón, A.G.; Arrogante-Funes, F.; Martín-González, F.; Novillo, C.J.; Arrogante-Funes, P. Evaluation of Conditioning Factors of Slope Instability and Continuous Change Maps in the Generation of Landslide Inventory Maps Using Machine Learning (ML) Algorithms. Remote Sens. 2021, 13, 4515. [Google Scholar] [CrossRef]
- Jung, C.; Lee, Y.; Cho, Y.; Kim, S. A Study of Spatial Soil Moisture Estimation Using a Multiple Linear Regression Model and MODIS Land Surface Temperature Data Corrected by Conditional Merging. Remote Sens. 2017, 9, 870. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Li, Z.; Yang, C.; Li, H.; Gong, L.; Guo, F. On the Scale Effect of Relationship Identification between Land Surface Temperature and 3D Landscape Pattern: The Application of Random Forest. Remote Sens. 2022, 14, 279. [Google Scholar] [CrossRef]
- Uschmajew, A. Local convergence of the alternating least squares algorithm for canonical tensor approximation. SIAM J. Matrix Anal. Appl. 2012, 33, 639–652. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Gregory S; Zhang J. Leveraging Google Earth Engine (GEE) and machine learning algorithms to incorporate in situ measurement from different times for rangelands monitoring. Remote Sens. Environ. 2020, 236, 111521. [Google Scholar] [CrossRef]
- Qi, S.; Song, B.; Liu, C.; Gong, P.; Luo, J.; Zhang, M.; Xiong, T. Bamboo Forest Mapping in China Using the Dense Landsat 8 Image Archive and Google Earth Engine. Remote Sens. 2022, 14, 762. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | Acquired Date | Platform | Spatial Resolution |
|---|---|---|---|
| Training | 4 March 1973 | Landsat 1 | 60 m × 60 m |
| 22 January 1974 | Landsat 1 | 60 m × 60 m | |
| 27 December 1978 | Landsat 3 | 60 m × 60 m | |
| 19 February 1979 | Landsat 3 | 60 m × 60 m | |
| 25 February 1988 | Landsat 5 | 30 m × 30 m | |
| 19 January 1989 | Landsat 4 | 30 m × 30 m | |
| 18 March 1990 | Landsat 5 | 30 m × 30 m | |
| 16 January 1991 | Landsat 5 | 30 m × 30 m | |
| 4 February 1992 | Landsat 5 | 30 m × 30 m | |
| 6 February 1993 | Landsat 5 | 30 m × 30 m | |
| 14 April 1994 | Landsat 5 | 30 m × 30 m | |
| 12 February 1995 | Landsat 5 | 30 m × 30 m | |
| 30 January 1996 | Landsat 5 | 30 m × 30 m | |
| 1 February 1997 | Landsat 5 | 30 m × 30 m | |
| 4 February 1998 | Landsat 5 | 30 m × 30 m | |
| 7 February 1999 | Landsat 5 | 30 m × 30 m | |
| 10 February 2000 | Landsat 5 | 30 m × 30 m | |
| 12 February 2001 | Landsat 5 | 30 m × 30 m | |
| 23 February 2002 | Landsat 7 | 30 m × 30 m | |
| 25 January 2003 | Landsat 7 | 30 m × 30 m | |
| 8 March 2004 | Landsat 5 | 30 m × 30 m | |
| 7 February 2005 | Landsat 5 | 30 m × 30 m | |
| 14 March 2006 | Landsat 5 | 30 m × 30 m | |
| 2 April 2007 | Landsat 5 | 30 m × 30 m | |
| 16 December 2008 | Landsat 5 | 30 m × 30 m | |
| 2 February 2009 | Landsat 5 | 30 m × 30 m | |
| 21 February 2010 | Landsat 5 | 30 m × 30 m | |
| 8 February 2011 | Landsat 5 | 30 m × 30 m | |
| 14 December 2013 | Landsat 8 | 30 m × 30 m | |
| 4 March 2014 | Landsat 8 | 30 m × 30 m | |
| 20 December 2015 | Landsat 8 | 30 m × 30 m | |
| 6 February 2016 | Landsat 8 | 30 m × 30 m | |
| 9 December 2017 | Landsat 8 | 30 m × 30 m | |
| 16 November 2018 | Landsat 8 | 30 m × 30 m | |
| Testing | 2 March 2019 | Landsat 8 | 30 m × 30 m |
| 5 April 2020 | Landsat 8 | 30 m × 30 m |
| Method | Year/Ranks | Accuracy | Precision | Recall | Score | Kappa |
|---|---|---|---|---|---|---|
| SWTSA | 2019/ | |||||
| 2019/ | ||||||
| 2019/ | ||||||
| 2019/ | ||||||
| 2020/ | ||||||
| 2020/ | ||||||
| 2020/ | ||||||
| 2020/ | ||||||
| MLR | 2019/- | |||||
| 2020/- | ||||||
| RFR | 2019/- | |||||
| 2020/- |
| Datasets | Samples | Mean | Variance | Minimum | Maximum |
|---|---|---|---|---|---|
| 2019 actual value | 4,030,560 | ||||
| 2019 SWTSA | 4,030,560 | ||||
| 2019 MLR | 4,030,560 | ||||
| 2019 RFR | 4,030,560 | ||||
| 2020 actual value | 4,030,560 | ||||
| 2020 SWTSA value | 4,030,560 | ||||
| 2020 MLR | 4,030,560 | ||||
| 2020 RFR | 4,030,560 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, Z.; Wang, L.; Chu, C.; Zhang, Y. Outlier Reconstruction of NDVI for Vegetation-Cover Dynamic Analyses. Appl. Sci. 2022, 12, 4412. https://doi.org/10.3390/app12094412
Sun Z, Wang L, Chu C, Zhang Y. Outlier Reconstruction of NDVI for Vegetation-Cover Dynamic Analyses. Applied Sciences. 2022; 12(9):4412. https://doi.org/10.3390/app12094412
Chicago/Turabian StyleSun, Zhengbao, Lizhen Wang, Chen Chu, and Yu Zhang. 2022. "Outlier Reconstruction of NDVI for Vegetation-Cover Dynamic Analyses" Applied Sciences 12, no. 9: 4412. https://doi.org/10.3390/app12094412
APA StyleSun, Z., Wang, L., Chu, C., & Zhang, Y. (2022). Outlier Reconstruction of NDVI for Vegetation-Cover Dynamic Analyses. Applied Sciences, 12(9), 4412. https://doi.org/10.3390/app12094412