


Aerodynamic Characteristics Analysis of Rectifier Drum of High-Speed Train Environmental Monitoring Devices

Abstract
:1. Introduction
2. Calculation Model and Numerical Method
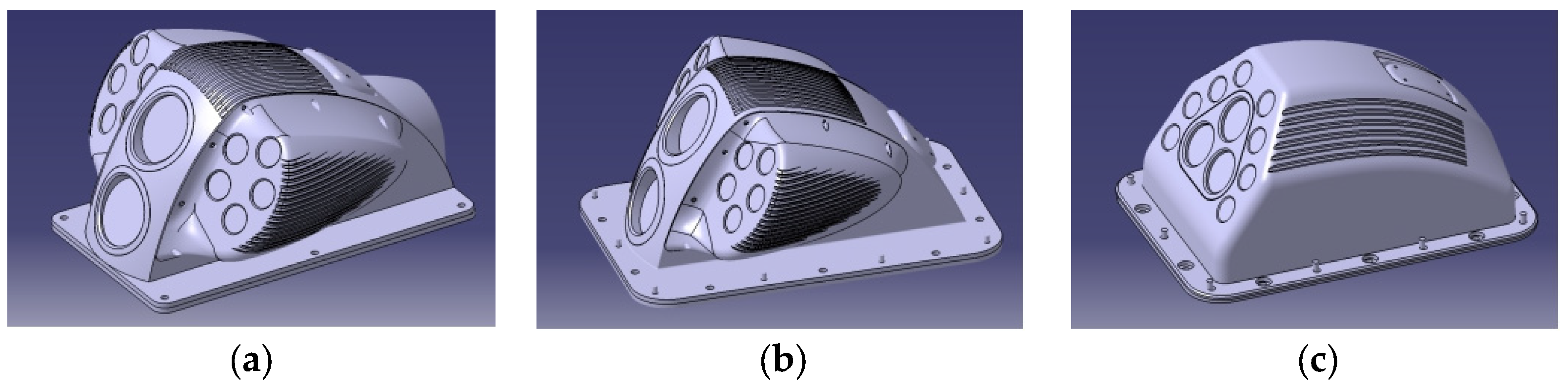
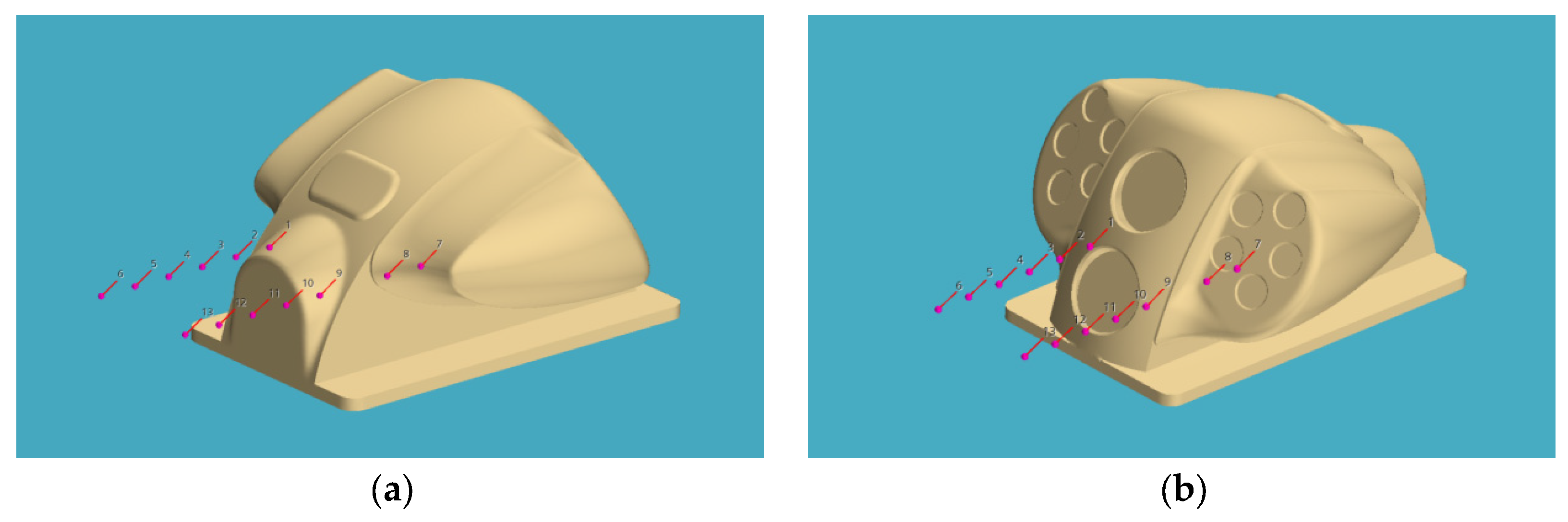
2.1. Model Introduction
2.2. Calculation Condition
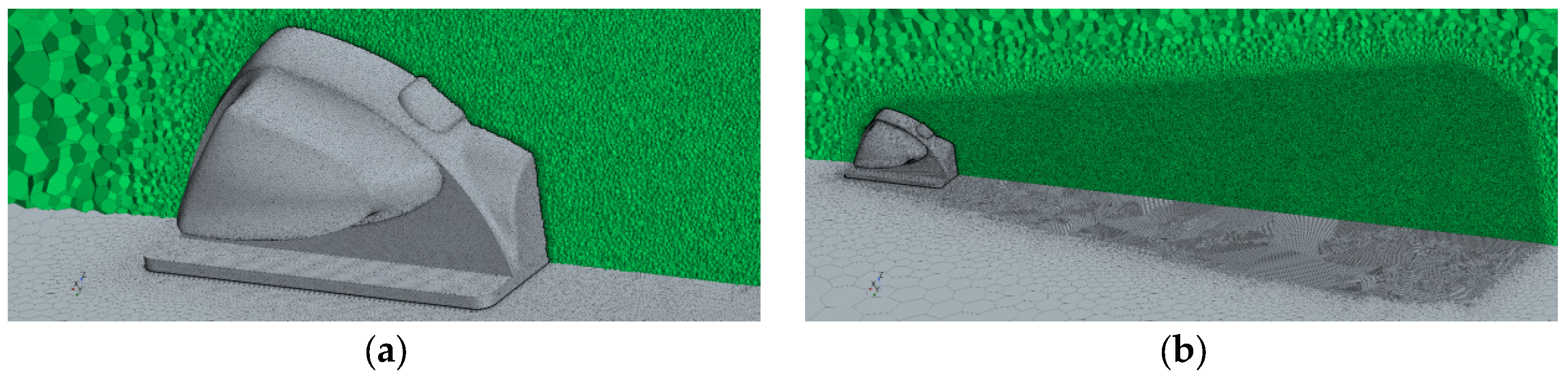
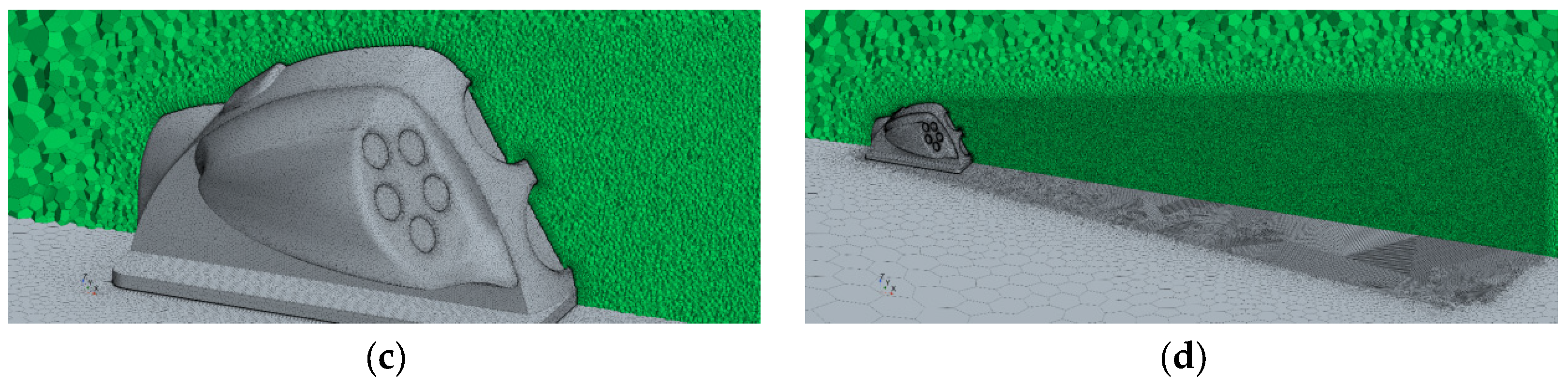
2.3. Computational Grid
2.4. Control Equations and Discretization Schemes
2.5. Turbulence and Transition Model
2.6. Combination of IDDES Method and Transition Model
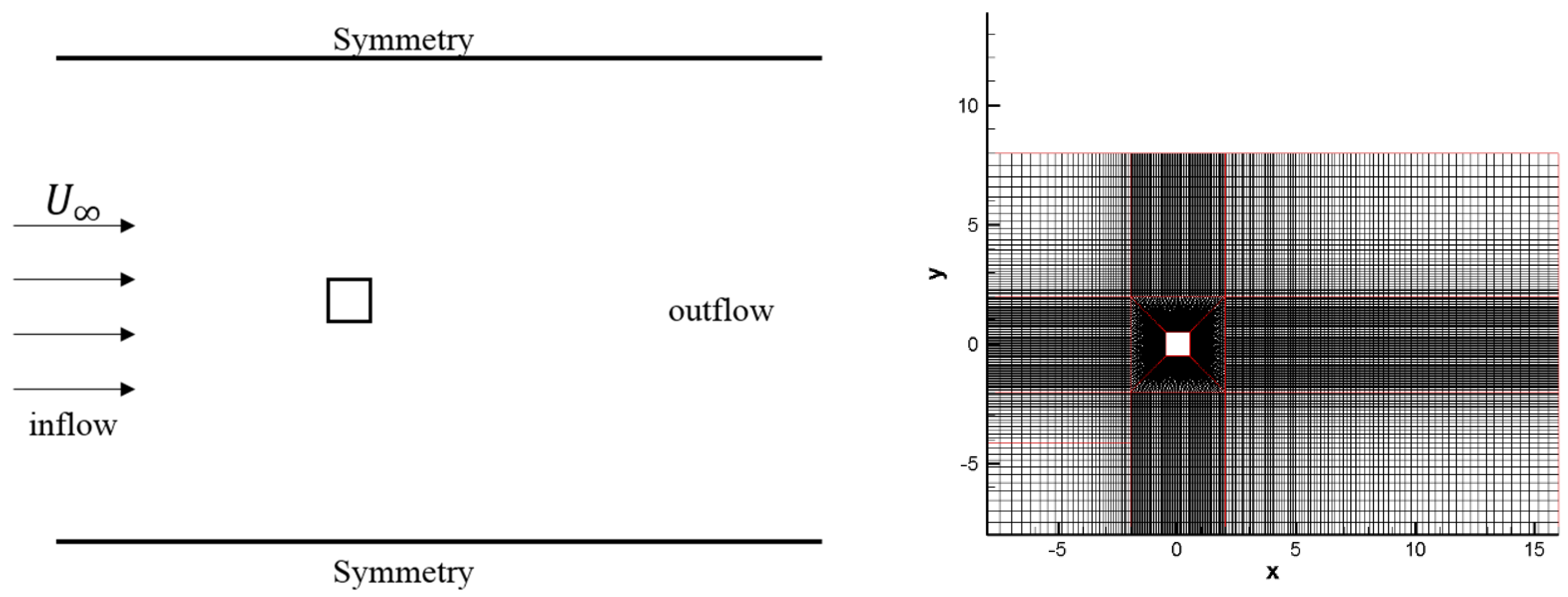
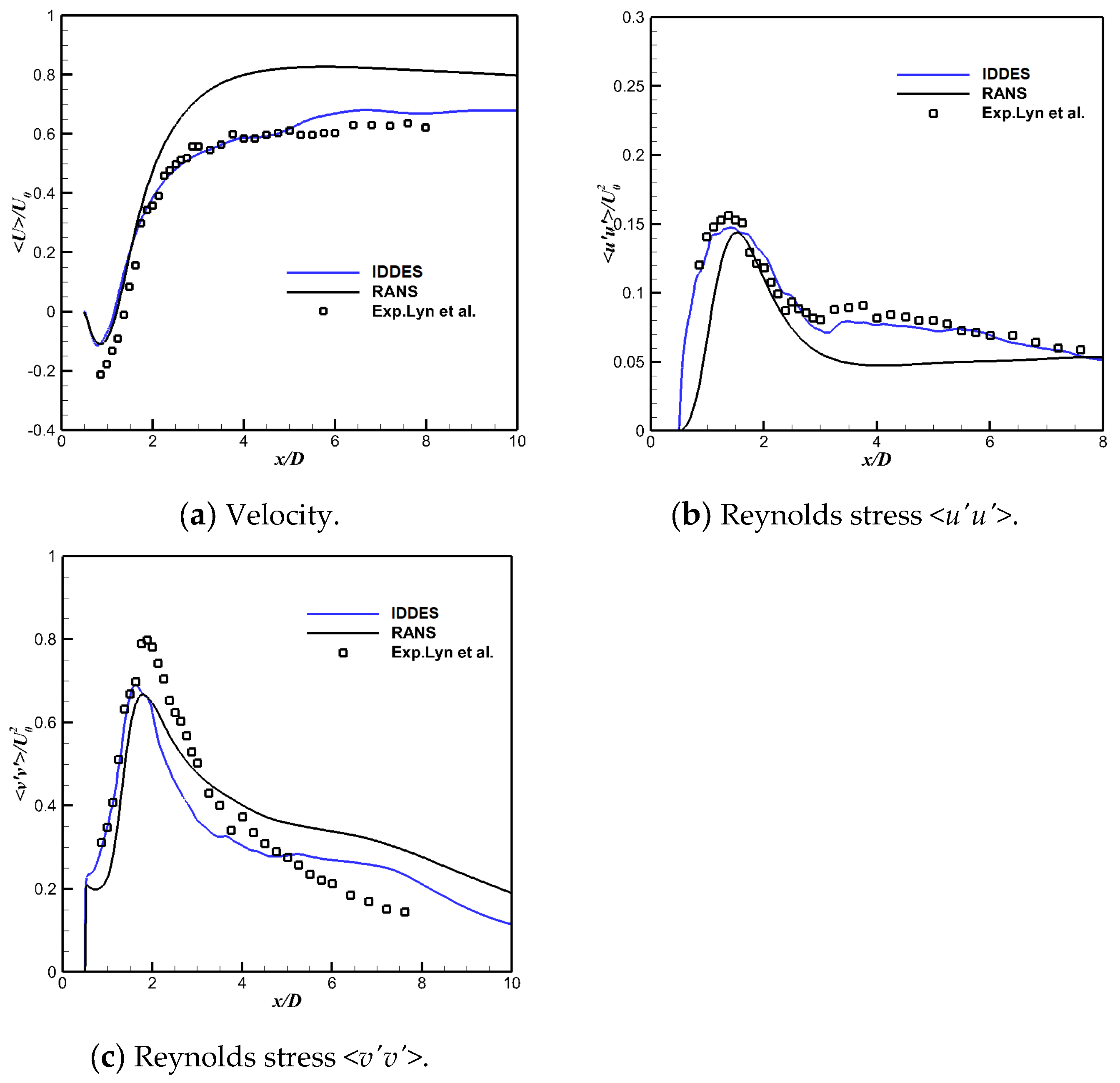
2.7. Numerical Validation
3. Result Discussion
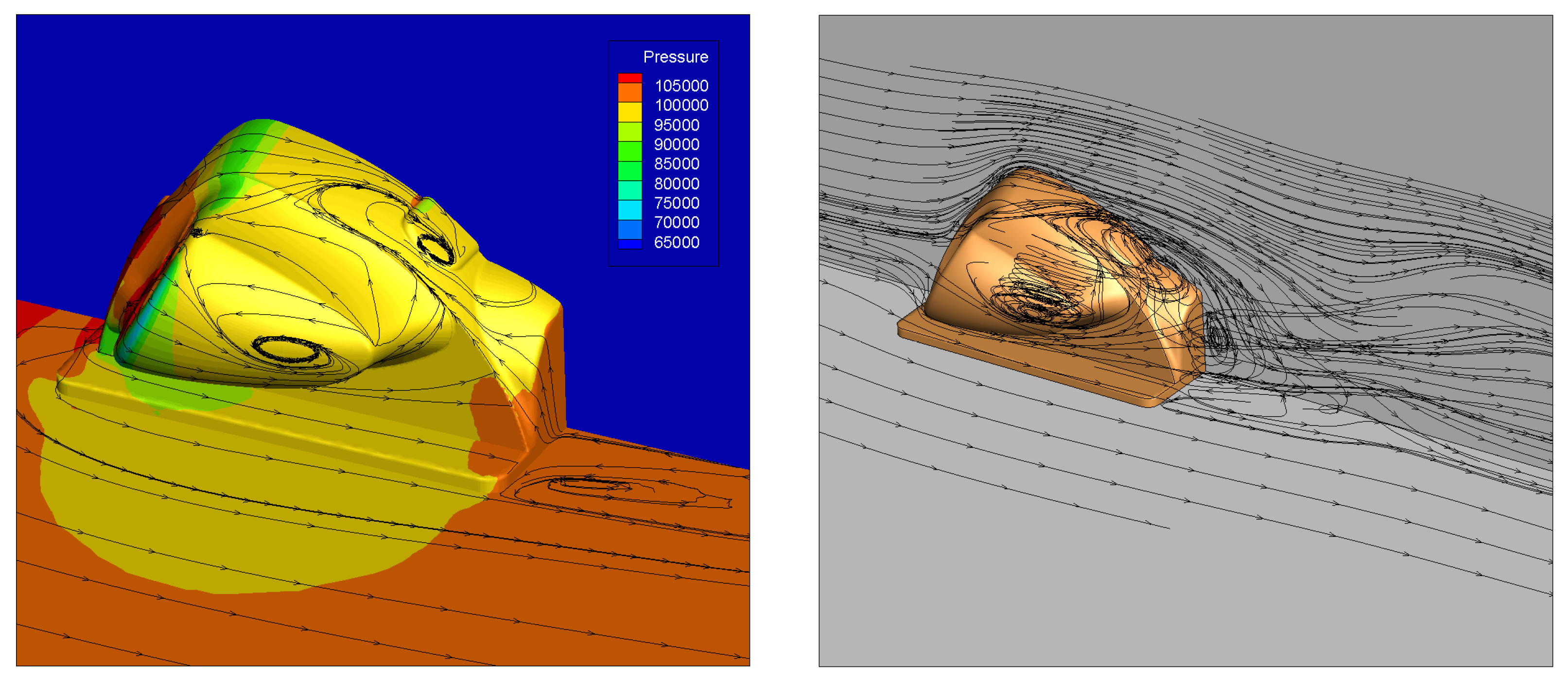
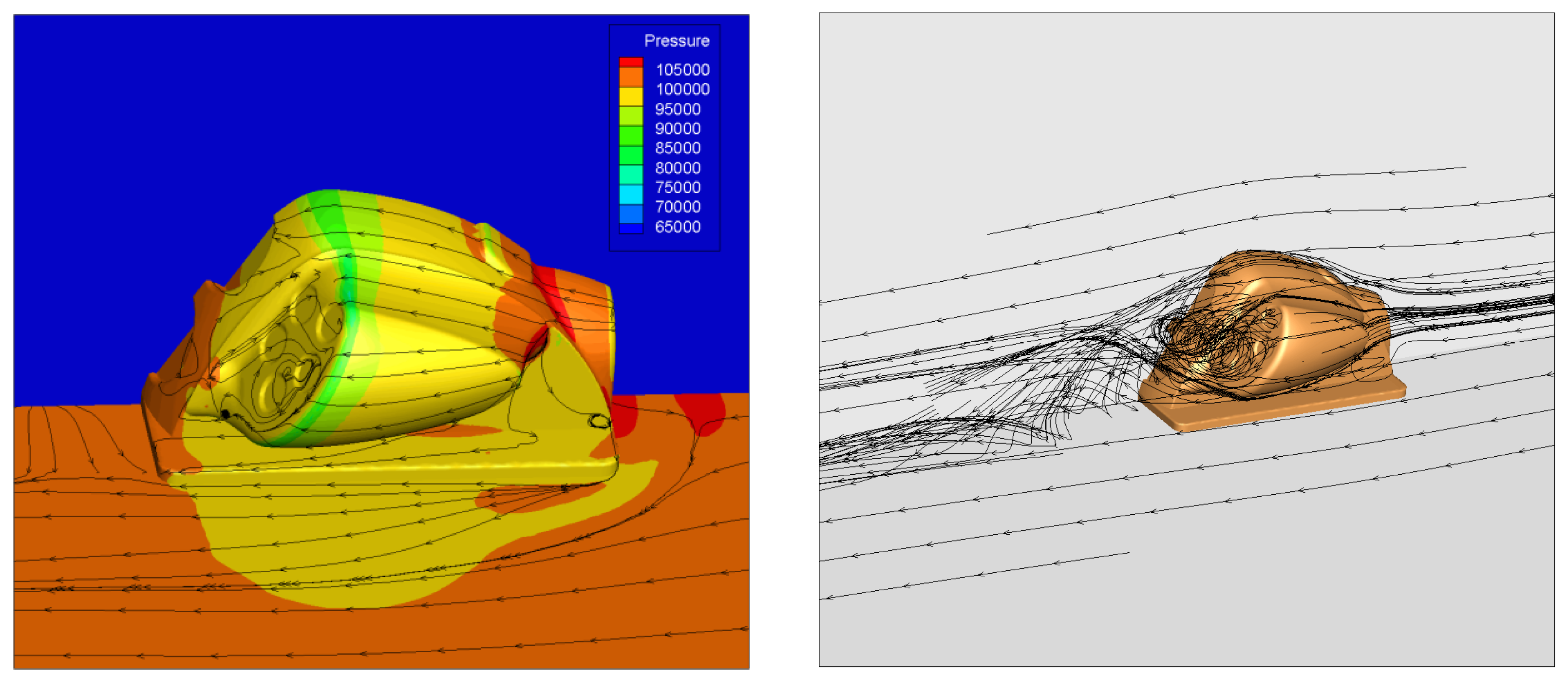
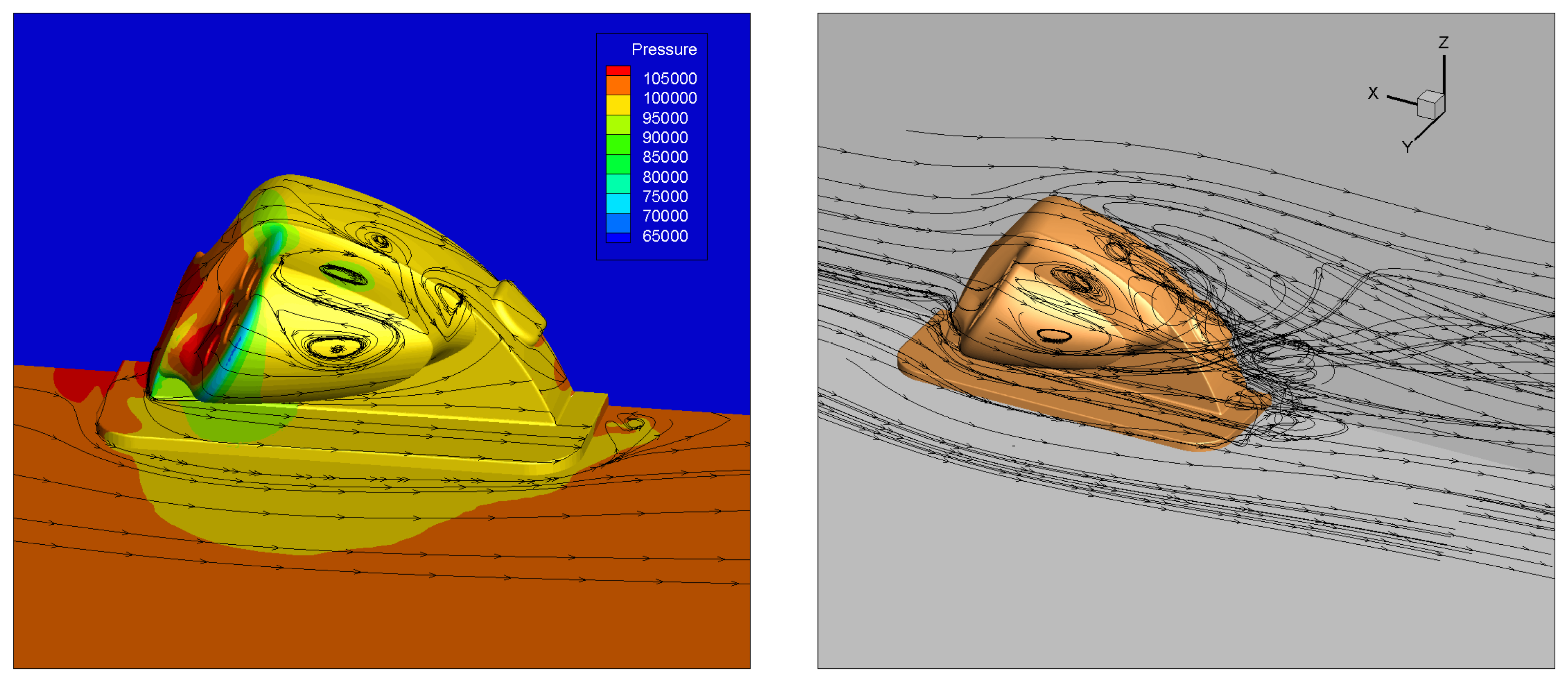
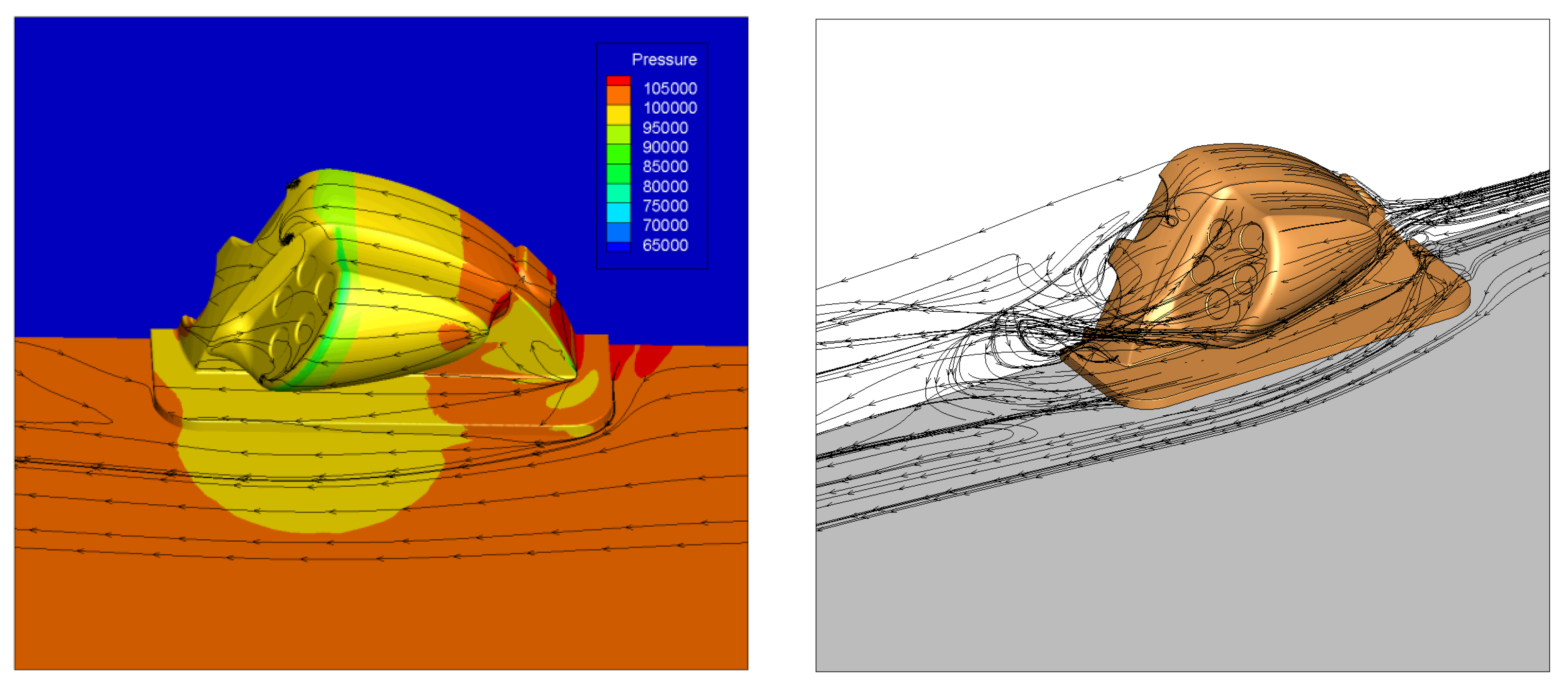
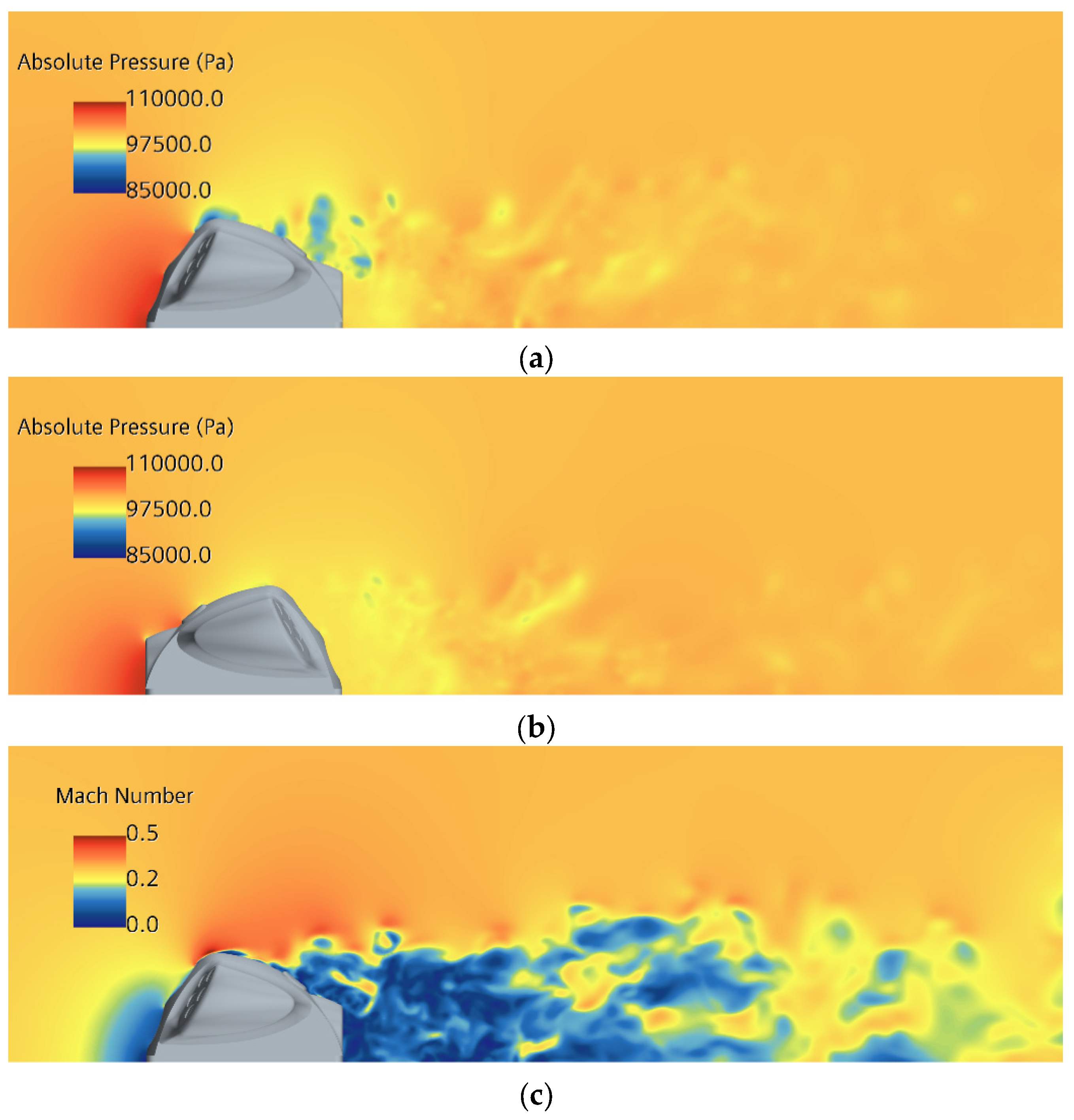
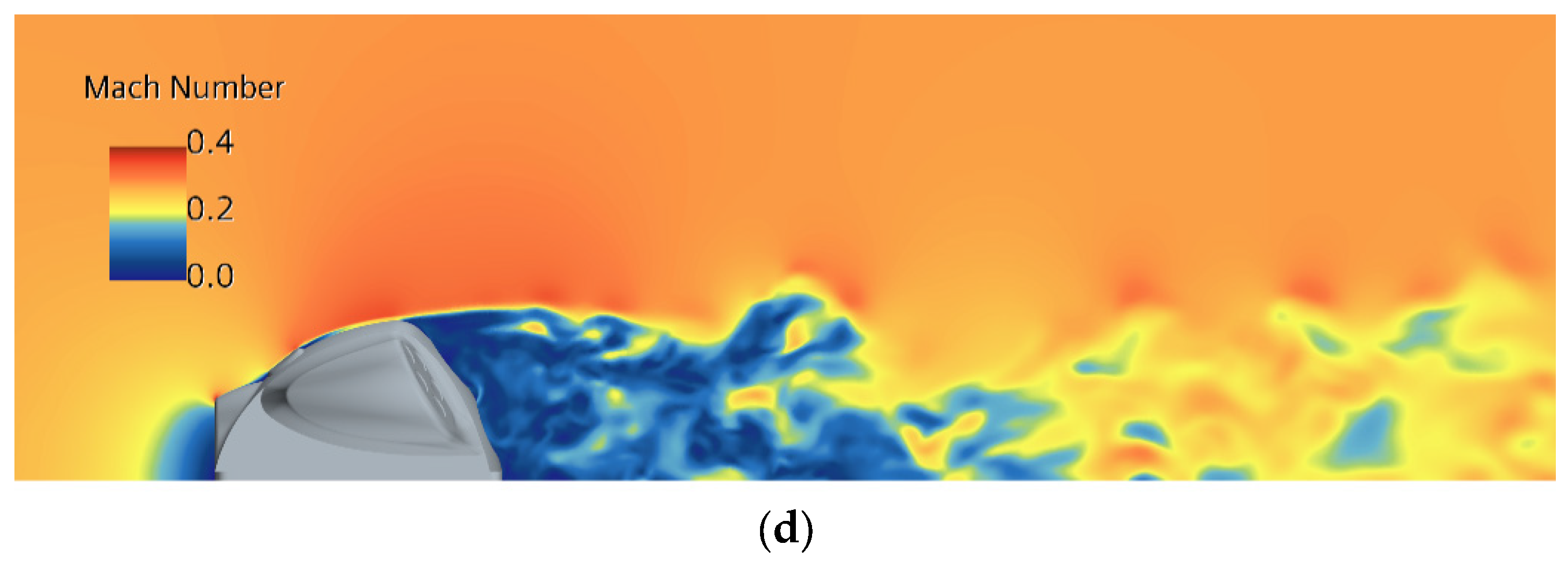
3.1. Aerodynamic Comparison
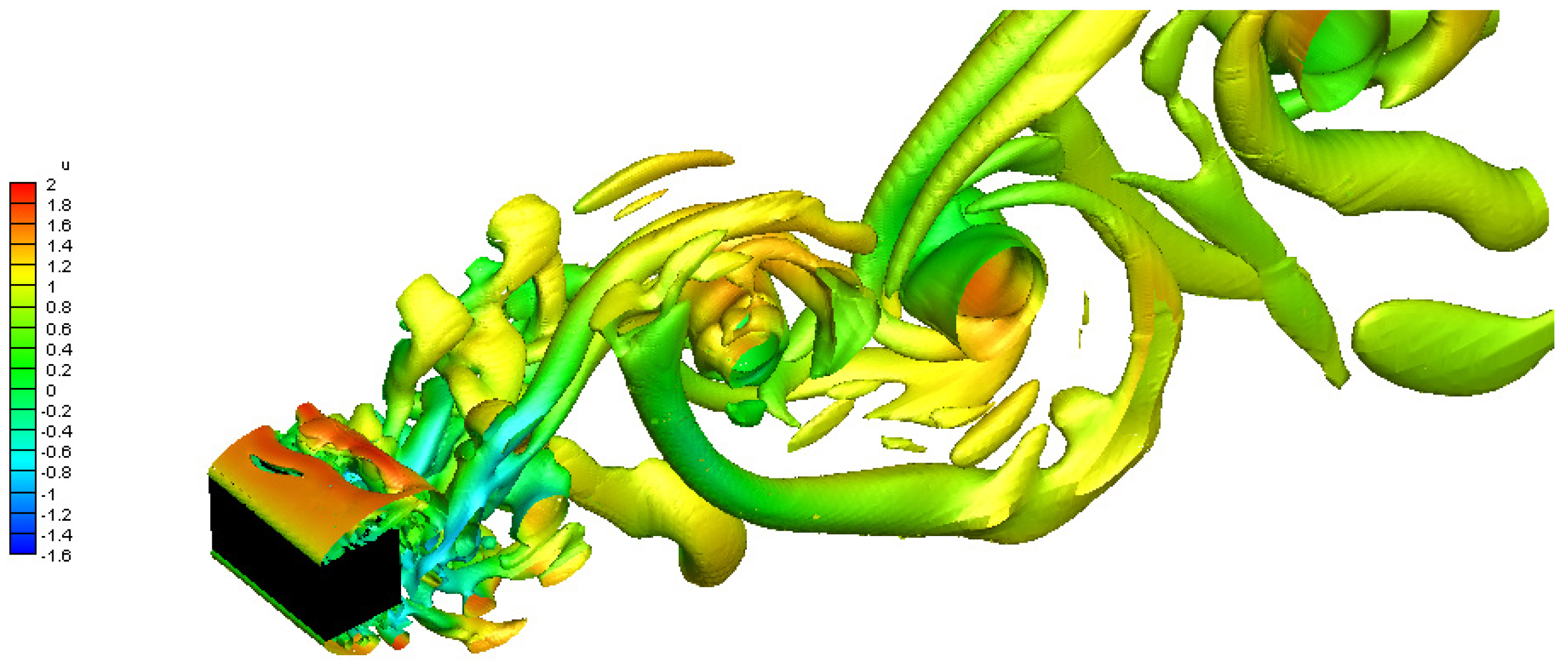
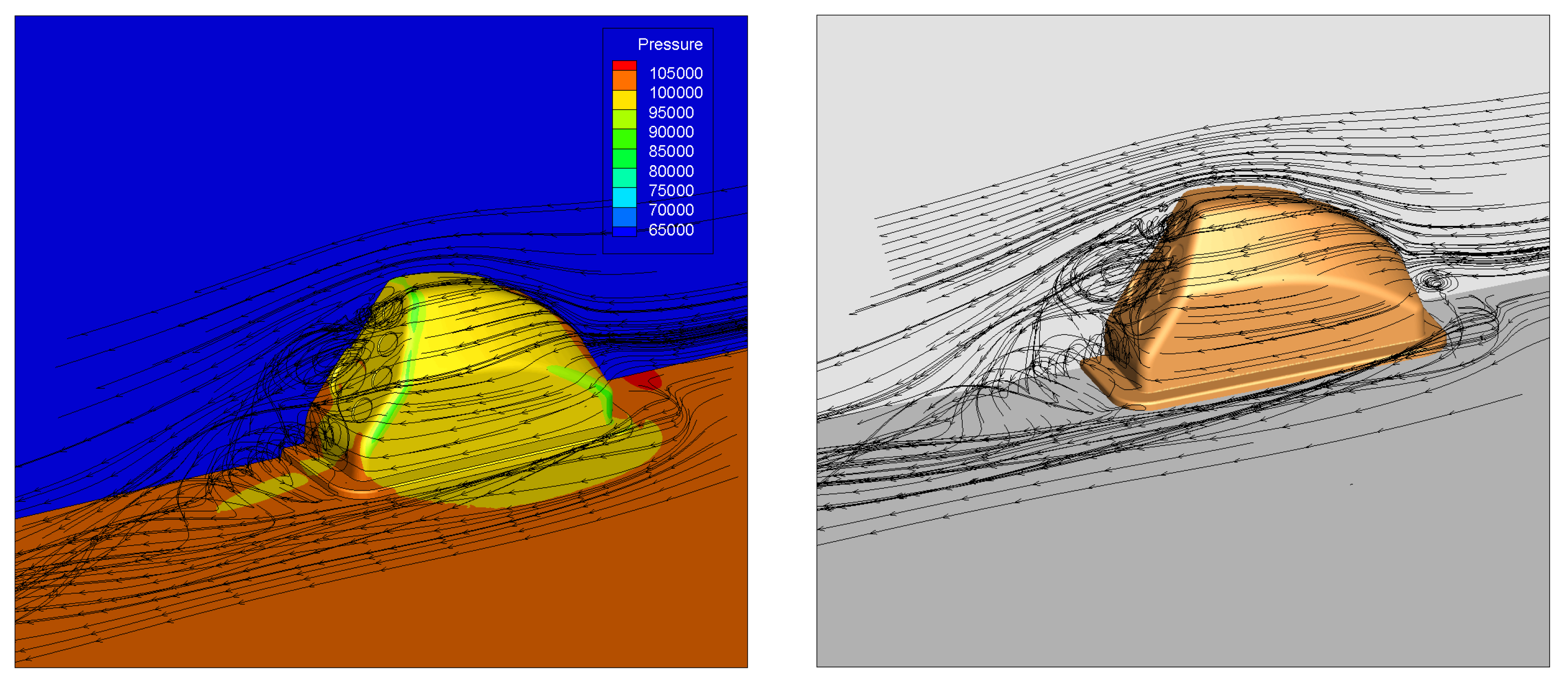
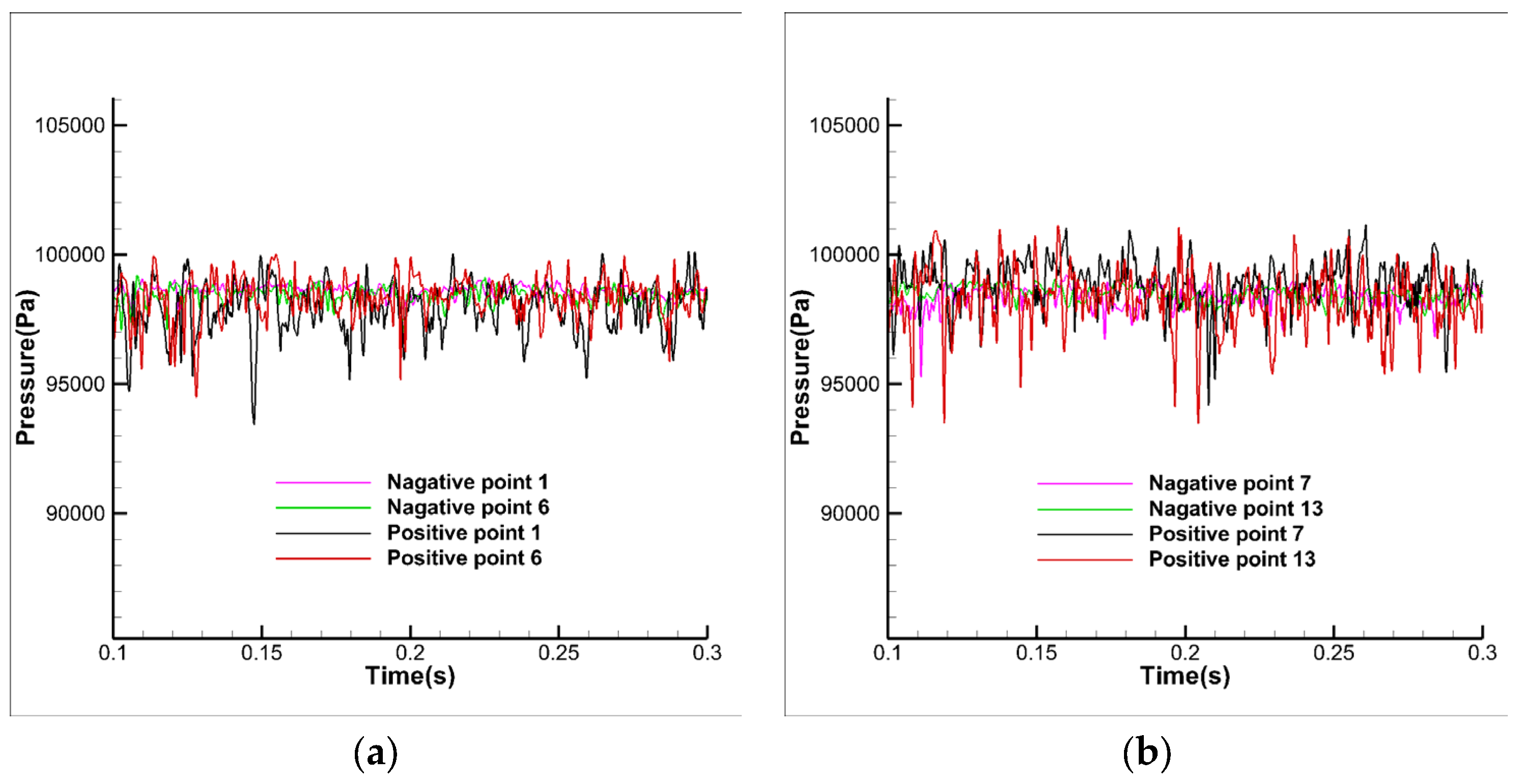
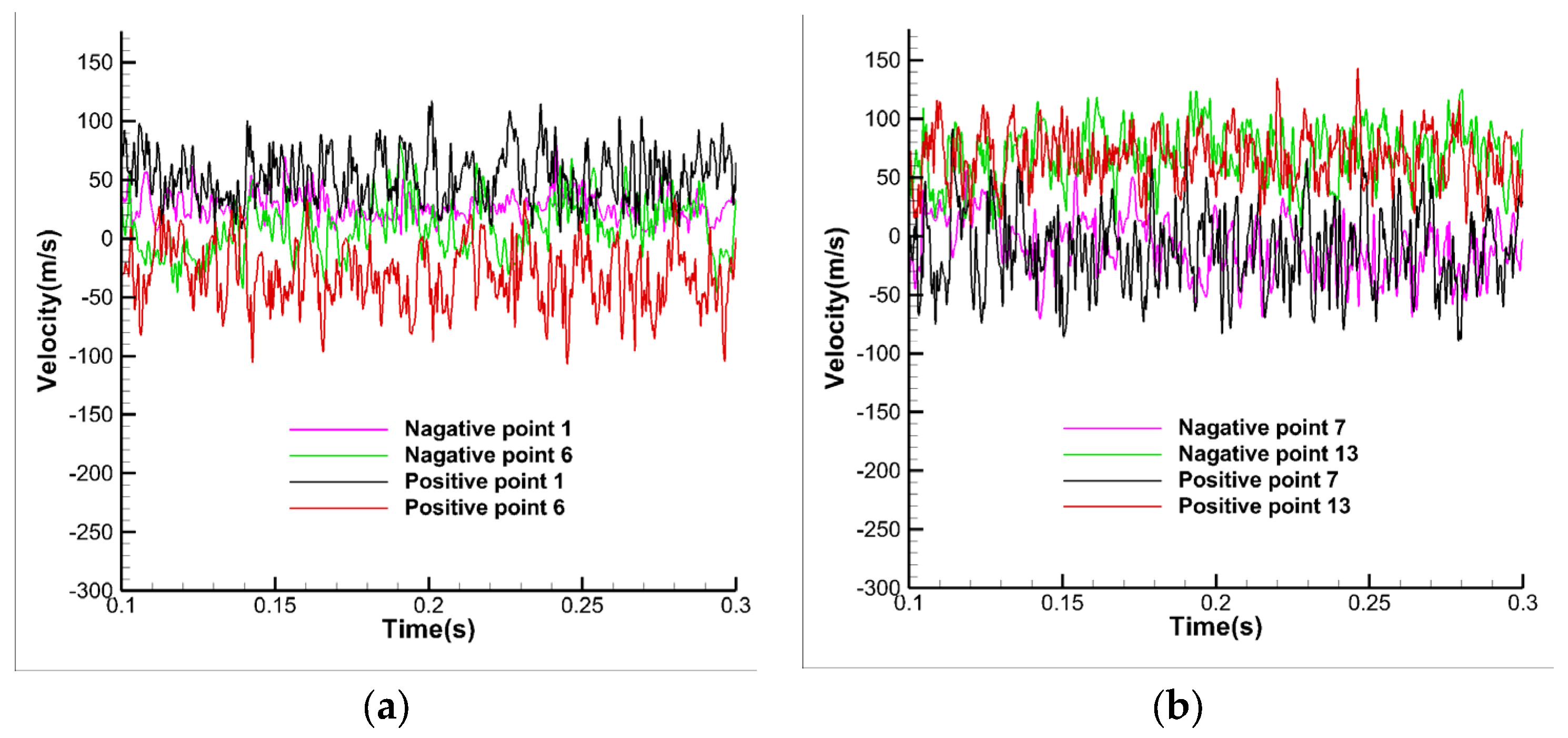
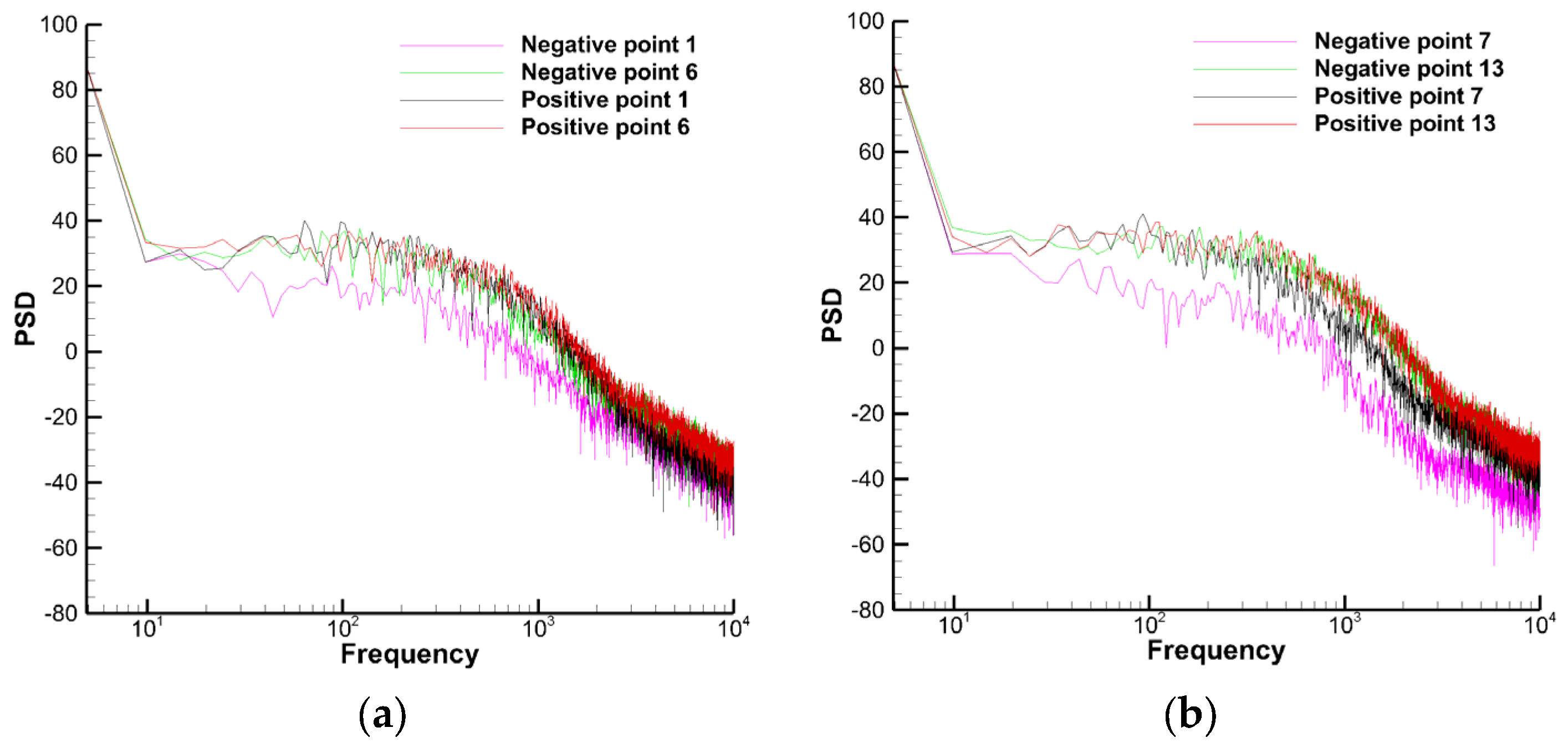
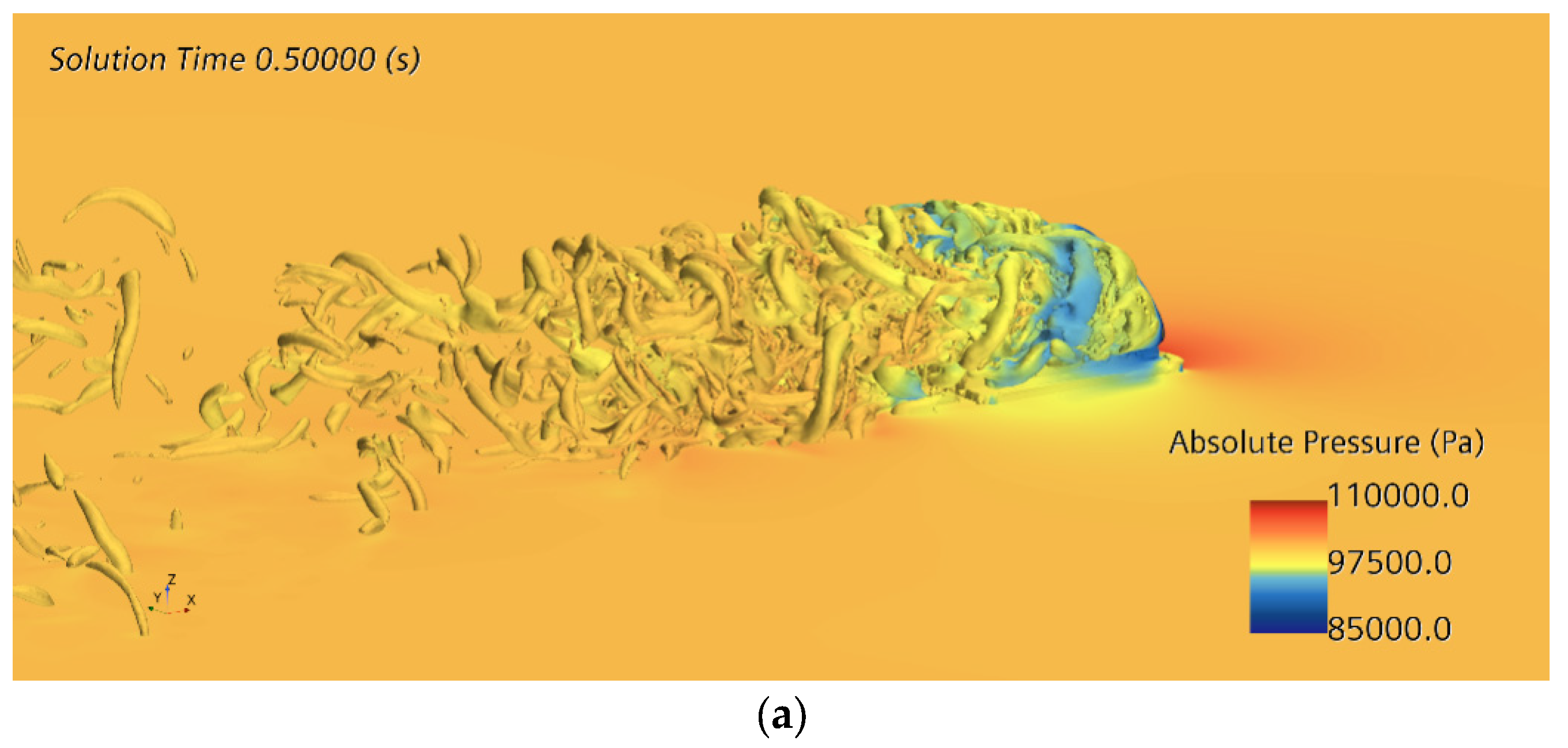
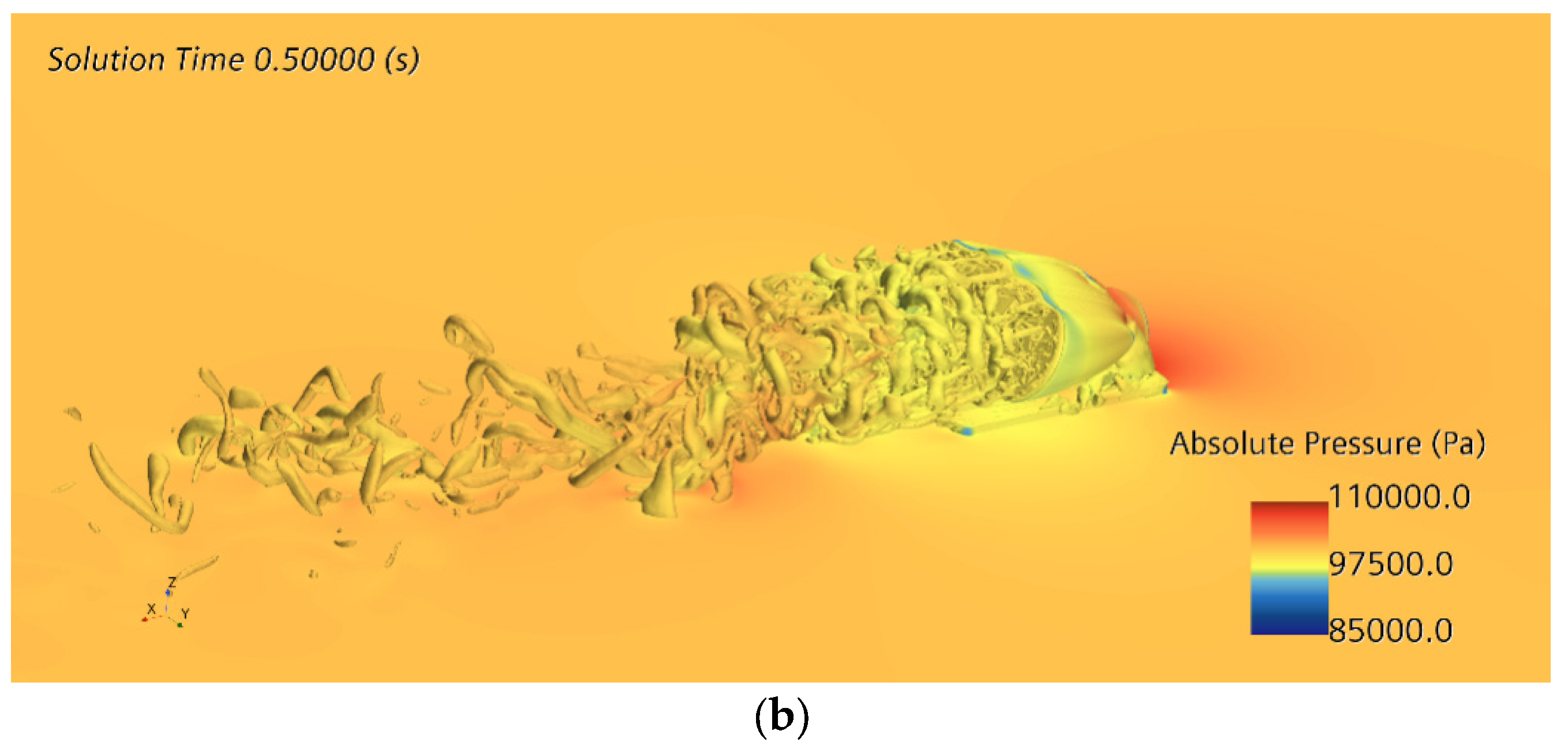
3.2. Unsteady Flow Analysis of Wake
4. Conclusions
- (1)
- The windward side of the detection device experienced positive pressure, and the sideline and leeward sides experienced negative pressure. Increasing the fillet radius of the sideline can appropriately reduce the aerodynamic resistance.
- (2)
- The shaping of the downstream flow in the leeward area can effectively reduce the resistance of the monitoring device. The resistance of configurations 1 and 2 in the reverse direction was about 1/2 of that in the forward direction, and the resistance of configurations 3 in the forward and reverse directions was the same. The streamlined upwind surface was conducive to reducing the scope of the leeward separation area and the amplitude of the pressure fluctuation in the leeward area and thus reduced the resistance;
- (3)
- The monitoring device had a certain height and formed a vortex on its leeward side when the train was running at high speed. From the results of the analysis on the pressure monitoring, we found that the separated airflow did not have an obvious dominant frequency and energy peak, and the possibility of resonance damage occurring to the following parts, such as the top of the train, was small.
Author Contributions
Funding
Conflicts of Interest
References
- Zhou, N.; Yang, W.; Liu, J.; Zhang, W.; Wang, D. Investigation of a pantograph-catenary monitoring system using condition-based pantograph recognition. Sci. Sin. Technol. 2021, 51, 23–34. [Google Scholar]
- Xiukun, W.; Da, S.; Dehua, W.; Xiaomeng, W.; Siyang, J.; Ziming, Y. A survey of the application of machine vision in rail transit system inspection. Control. Decis. 2021, 36, 257–282. [Google Scholar]
- Han, Z.; Liu, Z.; Zhang, G.; Yang, H.M. Overview of non-contact image detection technology for pantograph-catenary monitoring. J. China Railw. Soc. 2013, 35, 40–47. [Google Scholar]
- Hongqi, T. Train aerodynamics; China Railway Press: Beijing, China, 2007. [Google Scholar]
- Zhenxu, S.; Yongfang, Y.; Dilong, G.; Guowei, Y.; Shuanbao, Y.; Ye, Z.; Dawei, C.; Guibo, L.; Keming, S.; Ling, J. Research progress in aerodynamic optimization of high-speed trains. Chin. J. Theor. Appl. Mech. 2021, 53, 51–74. [Google Scholar]
- Jiqiang, N.; Xifeng, L.; Dan, Z. Equipment cabin aerodynamic performance of electric multiple unit going through tunnel by dynamic model test. J. Zhejiang Univ. Eng. Sci. 2016, 50, 1258–1265. [Google Scholar]
- Liu, T.; Chen, Z.; Zhou, X.; Zhang, J. A CFD analysis of the aerodynamics of a high-speed train passing through a windbreak transition under crosswind. Eng. Appl. Comput. Fluid Mech. 2018, 12, 137–151. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.L.; Sun, J.C.; Mei, Y.G.; Wang, R.L. Numerical Simulation on crossing pressure wave characteristics of two high-speed trains in tunnel. J. Vib. Shock. 2016, 35, 184–191. [Google Scholar]
- Weibin, M.A.; Qianli, Z.H.N.; Yanqing, L.I. Study evolvement of high-speed railway tunnel aerodynamic effect in China. J. Traffic Transp. Eng. 2012, 12, 25–32. [Google Scholar]
- Niu, J.Q.; Zhou, D.; Liu, T.H.; Liang, X.F. Numerical simulation of aerodynamic performance of a couple multiple units high-speed train. Veh. Syst. Dyn. 2017, 55, 681–703. [Google Scholar] [CrossRef]
- Kim, H.; Hu, Z.; Thompson, D. Effect of cavity flow control on high-speed train pantograph and roof aerodynamic noise. Railw. Eng. Sci. 2020, 28, 54–74. [Google Scholar] [CrossRef] [Green Version]
- Ko, Y.Y.; Chen, C.H.; Hoe, T.; Wang, S.T. Field measurements of aerodynamic pressures in tunnels induced by high speed trains. J. Wind Eng. Ind. Aerodyn. 2012, 100, 19–29. [Google Scholar] [CrossRef]
- Yundong, H.; Dawei, C.; Peng, L. Air distribution simulation study of EMU equipment bay under passing by each other on open track. Railw. Locomot. Car 2013, 33, 22–26. [Google Scholar]
- Zhu, C.; Hemida, H.; Flynn, D.; Baker, C.; Liang, X.; Zhou, D. Numerical simulation of the slipstream around a high-speed train with pantograph system. J. Railw. Sci. Eng. 2016, 13, 1447–1456. [Google Scholar]
- Wang, S.; Bell, J.R.; Burton, D.; Herbst, A.H.; Sheridan, J.; Thompson, M.C. The performance of different turbulence models (URANS, SAS and DES) for predicting high-speed train slipstream. J. Wind Eng. Ind. 2017, 165, 46–57. [Google Scholar] [CrossRef]
- Barman, P.C. Introduction to computational fluid dynamics. Int. J. Inf. Sci. Comput. 2016, 3, 117–120. [Google Scholar] [CrossRef]
- Hill, D.J.; Pantano, C.; Pullin, D.I. Large-eddy simulation and multiscale modeling of a Richtmyer-Meshkov instability with reshock. J. Fluid Mech. 2006, 557, 29–61. [Google Scholar] [CrossRef] [Green Version]
- Baorui, F. Aero-Configuration Design of Aero Plan; Beijing Aviation Industry Publishing Company: Beijing, China, 1997. (In Chinese) [Google Scholar]
- Viswanathan, A.; Squires, K.D.; Forsythe, J.R. Detached-Eddy Simulation around a forebody at high angle of attack. In AIAA Aerospace Sciences Meeting; AIAA Paper 2003-0263; AIAA: Reston, VA, USA, 2003. [Google Scholar]
- Forsythe, J.R.; Squires, K.D.; Wurtzler, K.E.; Spalart, P.R. Detached-eddy simulation of the F-15E at high alpha. In AIAA Aerospace Sciences Meeting; AIAA Paper 2002-0591; AIAA: Reston, VA, USA, 2002. [Google Scholar]
- Morton, S.A.; Steenman, M.B.; Cummings, R.M.; Forsythe, J.R. DES grid resolution issues for vertical flows on a delta wing and an F-18C. In 41st Aerospace Sciences Meeting and Exhibit; AIAA Paper 2003-1103; AIAA: Reston, VA, USA, 2003. [Google Scholar]
- Denning, R.M.; Allen, J.E.; Armstrong, F.W. The broad delta airliner. Aeronaut. J. 2003, 107, 547–558. [Google Scholar] [CrossRef]
- Jeong, J.; Hussain, F. On the identification of a vortex. J. Fluid Mech. 1995, 285, 69–94. [Google Scholar] [CrossRef]
- Lyn, D.A.; Einav, S.; Rodi, W. A laser-Doppler velocimetry study of ensemble-averaged characteristics of the turbulent near wake of a square cylinder. J. Fluid Mech. 1995, 304, 285–319. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Condition | Model | Velocity |
|---|---|---|
| 1 | 1 | 110 m/s |
| 2 | 1 | −110 m/s |
| 3 | 2 | 110 m/s |
| 4 | 2 | −110 m/s |
| 5 | 3 | 110 m/s |
| 6 | 3 | −110 m/s |
| Working Condition | Component | Cx | Cy | Cz | mx | my | mz |
|---|---|---|---|---|---|---|---|
| 1 | body | −0.227 | 0.302 | 0.426 | 0.0159 | −0.0147 | 0.0114 |
| ear | −0.141 | 0.559 | −0.272 | −0.1083 | 0.0170 | 0.0389 | |
| total | −0.369 | 0.862 | 0.154 | −0.0924 | 0.0024 | 0.0503 | |
| 2 | body | 0.142 | 0.204 | 0.356 | 0.0109 | −0.0071 | −0.0096 |
| ear | 0.056 | 0.446 | −0.026 | −0.0650 | 0.0134 | 0.0176 | |
| total | 0.197 | 0.650 | 0.330 | −0.0542 | 0.0063 | 0.0080 | |
| 3 | body | −0.263 | 0.290 | 0.529 | 0.0491 | −0.0101 | 0.0205 |
| ear | −0.106 | 0.582 | −0.215 | −0.1065 | 0.0259 | 0.0435 | |
| total | −0.368 | 0.872 | 0.314 | −0.0574 | 0.0158 | 0.0639 | |
| 4 | body | 0.157 | 0.186 | 0.415 | 0.0315 | −0.0350 | −0.0078 |
| ear | 0.062 | 0.420 | −0.050 | −0.0638 | 0.0165 | 0.0197 | |
| total | 0.219 | 0.606 | 0.365 | −0.0322 | −0.0183 | 0.0120 | |
| 5 | body | −0.195 | 0.836 | 0.640 | −0.0446 | 0.0007 | 0.0540 |
| 6 | body | 0.193 | 0.687 | 0.545 | −0.0286 | −0.0069 | −0.0143 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Wang, X.; Wu, J.; Tao, Y.; Xiong, N. Aerodynamic Characteristics Analysis of Rectifier Drum of High-Speed Train Environmental Monitoring Devices. Appl. Sci. 2023, 13, 7325. https://doi.org/10.3390/app13127325
Li B, Wang X, Wu J, Tao Y, Xiong N. Aerodynamic Characteristics Analysis of Rectifier Drum of High-Speed Train Environmental Monitoring Devices. Applied Sciences. 2023; 13(12):7325. https://doi.org/10.3390/app13127325
Chicago/Turabian StyleLi, Baowang, Xiaobing Wang, Junqiang Wu, Yang Tao, and Neng Xiong. 2023. "Aerodynamic Characteristics Analysis of Rectifier Drum of High-Speed Train Environmental Monitoring Devices" Applied Sciences 13, no. 12: 7325. https://doi.org/10.3390/app13127325
APA StyleLi, B., Wang, X., Wu, J., Tao, Y., & Xiong, N. (2023). Aerodynamic Characteristics Analysis of Rectifier Drum of High-Speed Train Environmental Monitoring Devices. Applied Sciences, 13(12), 7325. https://doi.org/10.3390/app13127325