
Detecting Underwater Concrete Cracks with Machine Learning: A Clear Vision of a Murky Problem




Abstract
:1. Introduction
- Visual inspections by divers: Specially trained divers can perform visual inspections of the structures to identify visible cracks or signs of damage. However, this method is limited by the accessibility of the structure and the diver’s ability to navigate and inspect the entire surface. Such inspections are also known for high risk for the divers involved in carrying out such inspections.
- Non-destructive testing techniques: Techniques such as ultrasonic testing and acoustic emission monitoring may be used to evaluate the interior condition of a concrete structure and detect cracks or other flaws. These methods rely on the analysis of sound waves or emitted signals to identify potential issues. However, they require specialized equipment and expertise to perform accurately. The time required to acquire and process data is long. Often, the cost of such data acquisition is very high as well.
- Advanced technologies: Underwater drones and robots equipped with cameras and sensors are emerging as valuable tools for crack detection and monitoring. These autonomous or remotely operated devices can access hard-to-reach areas, capture high-resolution images or videos, and collect data on the condition of the structures. This technology offers improved accessibility and accuracy in crack detection. The technique presented in this paper is an addition to this type of technology for underwater inspections.
2. An Overview of the Techniques Used for Underwater Concrete Crack Detection
2.1. Visual Inspection: Basic Method for Detecting Cracks in Underwater Concrete, Limited by Water Clarity and Visibility
2.2. Acoustic Methods: Use of Sound Waves to Detect Cracks, Including Impact-Echo, Impulse Response, and Ultrasonic Methods: Fluorosensor
2.3. Electrical Methods: Use of Electrical Resistance or Capacitance to Detect Cracks, etc.
2.4. Magnetic Methods: Use of Magnetic Fields to Detect Cracks, Including the Magnetic Flux Leakage Method
2.5. Deep-Learning-Based Methods: Image Analysis of Cracks Using Deep Learning
2.6. Other Methods: Including the Use of Fiber-Optic Sensors, Thermal Imaging, and X-ray Imaging
3. Navigating Challenges Related to Underwater Concrete Crack Detection Using Machine Learning
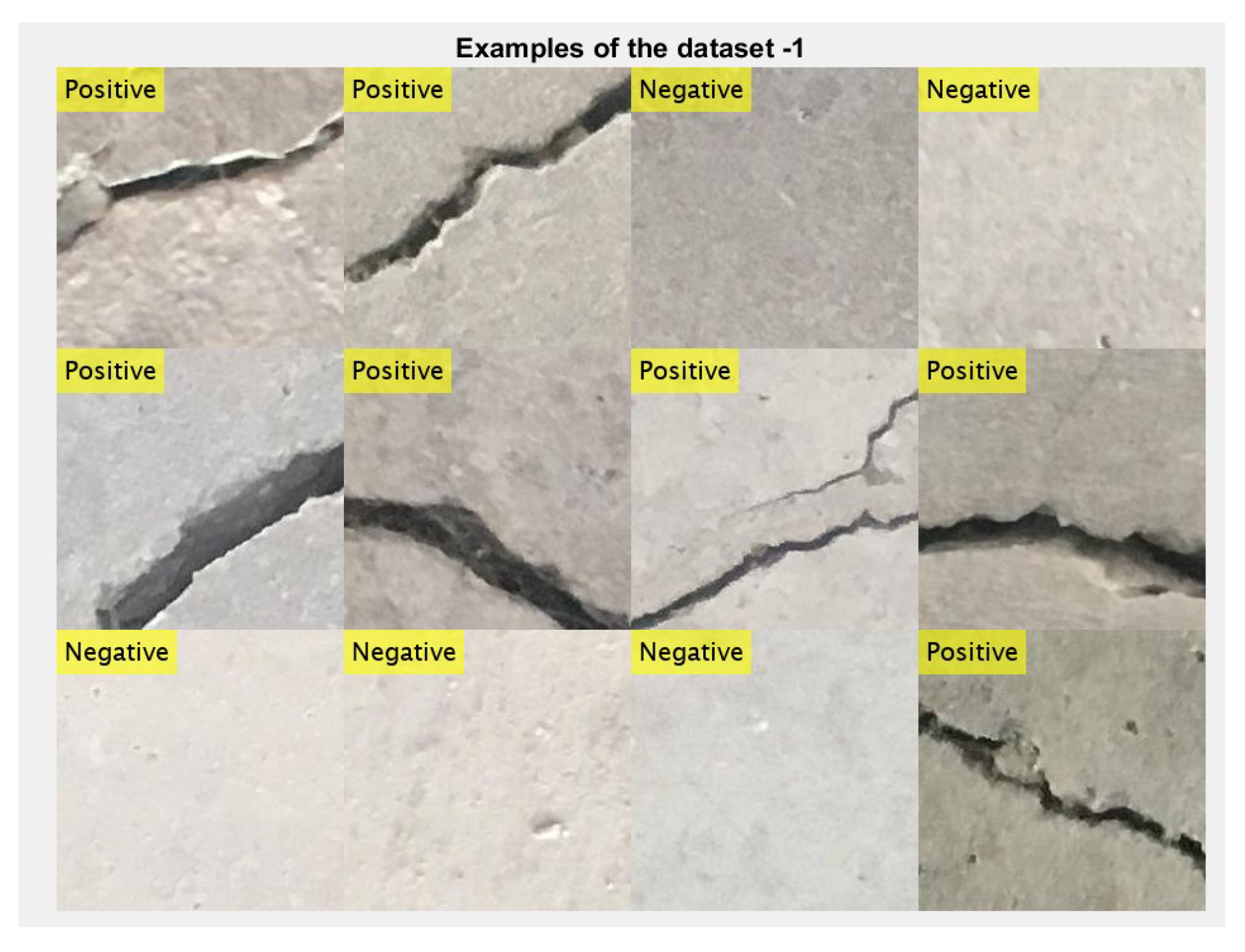
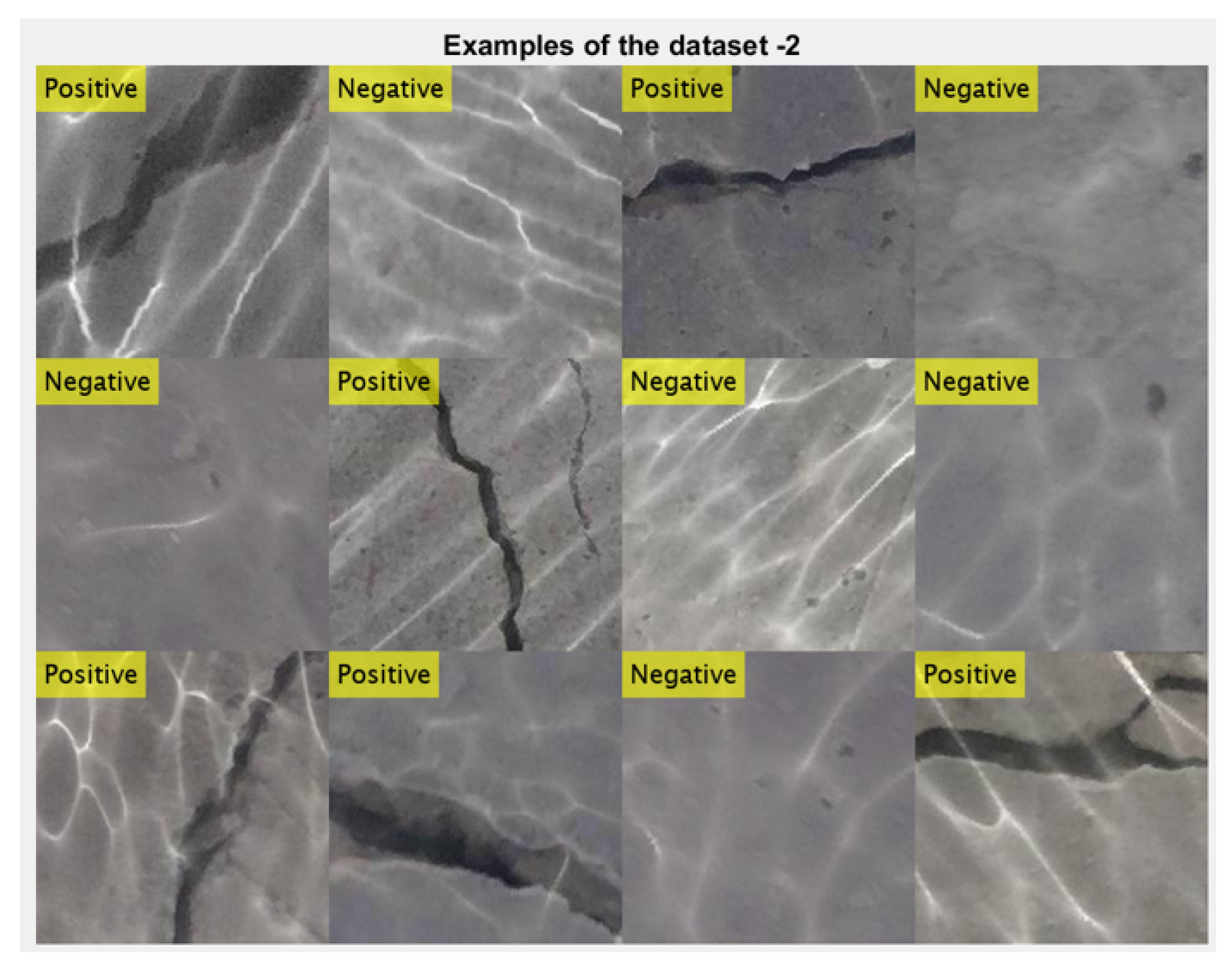
4. Augmentation of the Concrete Cracks Dataset
5. Underwater Concrete Crack Detection Using Machine Learning Approaches
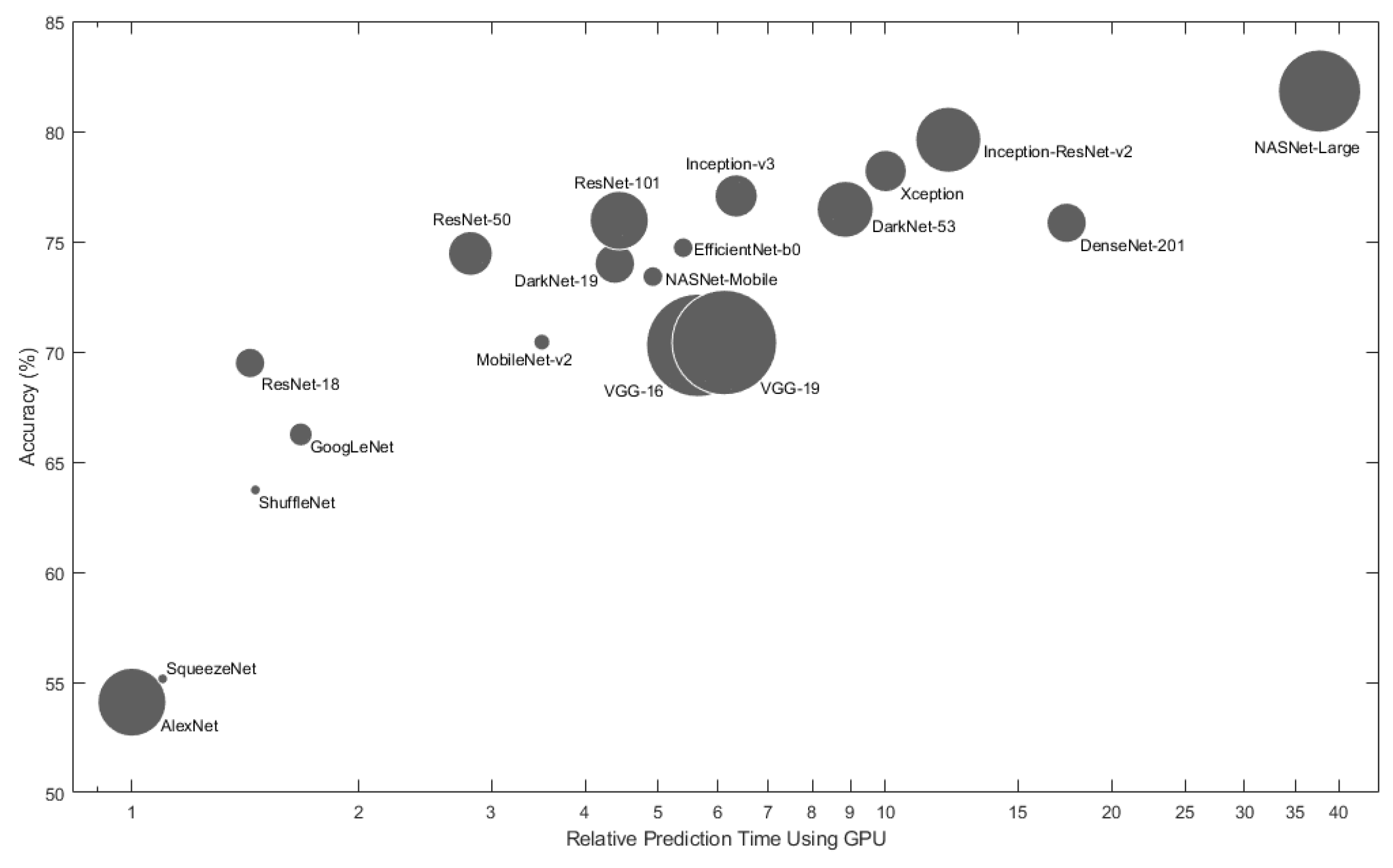
5.1. Transfer Learning and Use of a Pre-Trained Network
5.2. Test Cases—Review of Performance of Existing Networks on Concrete Images with and without Cracks and Underwater Effects
5.3. Test Case 1: Testing the Trained Network on Identifying Cracks within Non-Crack Surfaces and Using the Same Network to Test Underwater Images
- Training was conducted on the concrete crack images dataset;
- Testing was conducted on the underwater crack images dataset;
- For case investigation, we used convolutional neural network (CNN) architecture AlexNet and SqueezeNet.
5.4. Test Case 2: Testing a Network Trained to Identify Cracks within Non-Crack Surfaces on Identifying Cracks in Underwater Images
- Training was conducted on the underwater crack images dataset;
- Testing was conducted on the underwater crack images dataset;
- For case investigation, we used convolutional neural network (CNN) architecture AlexNet and SqueezeNet.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Palevičius, P.; Pal, M.; Landauskas, M.; Orinaitė, U.; Timofejeva, I.; Ragulskis, M. Automatic Detection of Cracks on Concrete Surfaces in the Presence of Shadows. Sensors 2022, 22, 3662. [Google Scholar] [CrossRef] [PubMed]
- Pal, M.; Palevičius, P.; Landauskas, M.; Orinaitė, U.; Timofejeva, I.; Ragulskis, M. An Overview of Challenges Associated with Automatic Detection of Concrete Cracks in the Presence of Shadows. Appl. Sci. 2021, 11, 11396. [Google Scholar] [CrossRef]
- Cox, C.; Munk, W. Some problems in optical oceanography. J. Mar. Res. 1955, 1, 63–78. [Google Scholar] [CrossRef]
- Zhong, N.; Zhu, X.; Liao, Q.; Wang, Y.; Chen, R.; Sun, Y. Effects of surface roughness on optical properties and sensitivity of fiber-optic evanescent wave sensors. Appl. Opt. 2013, 52, 3937–3945. [Google Scholar] [CrossRef]
- Li, H.; Han, C. Sonochemical Synthesis of Cyclodextrin-Coated Quantum Dots for Optical Detection of Pollutant Phenols in Water. Chem. Mater. 2008, 20, 6053–6059. [Google Scholar] [CrossRef]
- Legleiter, C.; Roberts, D.; Marcus, W.; Fonstad, M. Passive optical remote sensing of river channel morphology and in-stream habitat: Physical basis and feasibility. Remote Sens. Environ. 2004, 93, 493–510. [Google Scholar] [CrossRef] [Green Version]
- Gordon, H.R.; Ding, K. Self-shading of in-water optical instruments. Limnol. Oceanogr. 1992, 37, 491–500. [Google Scholar] [CrossRef]
- Dong, Y.; Tang, S.; Zhang, X. Effect of Random Sea Surface on Downlink Underwater Wireless Optical Communications. IEEE Commun. Lett. 2013, 17, 2164–2167. [Google Scholar] [CrossRef]
- Yoshimori, K.; Itoh, K.; Ichioka, Y. Optical characteristics of a wind-roughened water surface: A two-dimensional theory. Appl. Opt. 1995, 34, 6236–6247. [Google Scholar] [CrossRef]
- Huang, C.; Chen, Y.; Zhang, S.; Wu, J. Detecting, Extracting, and Monitoring Surface Water From Space Using Optical Sensors: A Review. Rev. Geophys. 2018, 56, 333–360. [Google Scholar] [CrossRef]
- Shi, H.; Itoh, M.; Takami, T. Optical Observation of the Supercavitation Induced by High-Speed Water Entry. J. Fluids Eng. 2000, 122, 806–810. [Google Scholar] [CrossRef]
- Smart, J. Underwater optical communications systems part 1: Variability of water optical parameters. In Proceedings of the MILCOM 2005—2005 IEEE Military Communications Conference, Atlantic City, NJ, USA, 17–20 October 2005; Volume 2, pp. 1140–1146. [Google Scholar] [CrossRef]
- Hermann, A.; Schmidt, W.G.; Schwerdtfeger, P. Resolving the Optical Spectrum of Water: Coordination and Electrostatic Effects. Phys. Rev. Lett. 2008, 100, 207403. [Google Scholar] [CrossRef] [Green Version]
- Steele, H.M.; Hamill, P. Effects of temperature and humidity on the growth and optical properties of sulphuric acid—Water droplets in the stratosphere. J. Aerosol Sci. 1981, 12, 517–528. [Google Scholar] [CrossRef]
- Jou, F.Y.; Freeman, G.R. Temperature and isotope effects on the shape of the optical absorption spectrum of solvated electrons in water. J. Phys. Chem. 1979, 83, 2383–2387. [Google Scholar] [CrossRef]
- Witte, W.G.; Whitlock, C.H.; Harriss, R.C.; Usry, J.W.; Poole, L.R.; Houghton, W.M.; Morris, W.D.; Gurganus, E.A. Influence of dissolved organic materials on turbid water optical properties and remote-sensing reflectance. J. Geophys. Res. Ocean. 1982, 87, 441–446. [Google Scholar] [CrossRef]
- Momen, M.; Wood, J.D.; Novick, K.A.; Pangle, R.; Pockman, W.T.; McDowell, N.G.; Konings, A.G. Interacting Effects of Leaf Water Potential and Biomass on Vegetation Optical Depth. J. Geophys. Res. Biogeosci. 2017, 122, 3031–3046. [Google Scholar] [CrossRef]
- Thornton, B. Effects of Pressure on the Optical Emissions Observed from Solids Immersed in Water Using a Single Pulse Laser. Appl. Phys. Express 2011, 4, 022702. [Google Scholar] [CrossRef]
- Hill, R.J. Optical propagation in turbulent water. J. Opt. Soc. Am. 1978, 68, 1067–1072. [Google Scholar] [CrossRef]
- Stavn, R.H.; Weidemann, A.D. Optical modeling of clear ocean light fields: Raman scatteringeffects. Appl. Opt. 1988, 27, 4002–4011. [Google Scholar] [CrossRef]
- Gilvear, D.; Hunter, P.; Higgins, T. An experimental approach to the measurement of the effects of water depth and substrate on optical and near infra-red reflectance: A field-based assessment of the feasibility of mapping submerged instream habitat. Int. J. Remote Sens. 2007, 10, 2241–2256. [Google Scholar] [CrossRef]
- Bristow, M.; Nielsen, D.; Bundy, D.; Furtek, R. Use of water Raman emission to correct airborne laser fluorosensor data for effects of water optical attenuation. Appl. Opt. 1981, 20, 2889–2906. [Google Scholar] [CrossRef] [PubMed]
- Jiang, A.L.; Zhao, Y.H.; Zhang, L.W. Experimental study of acoustic emission characteristics of underwater concrete structures. In Proceedings of the 2008 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications, Nanjing, China, 5–8 December 2008; pp. 252–257. [Google Scholar]
- Baharom, S.; Mutlib, N.K.; El-Shafie, A. Crack detection of Underwater Concrete Beams Using Ultrasonic Surface Waves. In Proceedings of the 2015 World Congress on Advances in Structural Engineering and Mechanics (ASEM15), Incheon, Republic of Korea, 25–29 August 2015. [Google Scholar]
- Wang, C.; Wei, P.; Wang, X.; Zhang, S.; Cui, W. Blast-Resistance and Damage Evaluation of Concrete Gravity Dam Exposed to Underwater Explosion: Considering the Initial Stress Field. KSCE J. Civ. Eng. 2021, 25, 2922–2935. [Google Scholar] [CrossRef]
- Hamid, H.; Chorzepa, M.G.; Durham, S.A. Investigation of Cracks Observed in Underwater Bridge Seal Structures and Crack Control by Means of Material Design. J. Perform. Constr. Facil. 2020, 34, 04020117. [Google Scholar] [CrossRef]
- Kirk, J.T.O. Dependence of relationship between inherent and apparent optical properties of water on solar altitude. Limnol. Oceanogr. 1984, 29, 350–356. [Google Scholar] [CrossRef]
- Lee, Z.P.; Du, K.; Voss, K.J.; Zibordi, G.; Lubac, B.; Arnone, R.; Weidemann, A. An inherent-optical-property-centered approach to correct the angular effects in water-leaving radiance. Appl. Opt. 2011, 50, 3155–3167. [Google Scholar] [CrossRef]
- Xingxin, X.; Jin, W.; Jinyin, S.; Zaicheng, H. Case Study: Application of GPR to Detection of Hidden Dangers to Underwater Hydraulic Structures. J. Hydraul. Eng. 2006, 132, 12–20. [Google Scholar] [CrossRef]
- Zhang, Y.; Pulliainen, J.; Koponen, S.; Hallikainen, M. Application of an empirical neural network to surface water quality estimation in the Gulf of Finland using combined optical data and microwave data. Remote Sens. Environ. 2002, 81, 327–336. [Google Scholar] [CrossRef]
- Gege, P. The water color simulator WASI: An integrating software tool for analysis and simulation of optical in situ spectra. Comput. Geosci. 2004, 30, 523–532. [Google Scholar] [CrossRef]
- Musa, Z.N.; Popesc, I.; Mynett, A. A review of applications of satellite SAR, optical, altimetry and DEM data for surface water modelling, mapping and parameter estimation. Hydrol. Earth Syst. Sci. 2015, 19, 3755–3769. [Google Scholar] [CrossRef] [Green Version]
- Irwin, K.; Beaulne, D.; Braun, A.; Fotopoulos, G. Fusion of SAR, Optical Imagery and Airborne LiDAR for Surface Water Detection. Remote Sens. 2017, 9, 890. [Google Scholar] [CrossRef] [Green Version]
- Mucolli, L.; Krupinski, S.; Maurelli, F.; Mehdi, S.A.; Mazhar, S. Detecting cracks in underwater concrete structures: An unsupervised learning approach based on local feature clustering. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; Volume 10, pp. 1–8. [Google Scholar] [CrossRef]
- Shi, P.; Fan, X.; Ni, J.; Khan, Z.; Li, M. A novel underwater dam crack detection and classification approach based on sonar images. PLoS ONE 2017, 12, e0179627. [Google Scholar] [CrossRef] [Green Version]
- Shi, P.; Fan, X.; Wang, G. A novel underwater dam crack detection algorithm based on sonar images. In Proceedings of the 2015 5th International Conference on Computer Sciences and Automation Engineering (ICCSAE 2015), Sanya, China, 14–15 November 2015. [Google Scholar] [CrossRef] [Green Version]
- El-Messiry, H.; Khaled, H.; Maher, A.; Ahmed, A. Real-Time Crack Detection Using ROV. In Lecture Notes in Networks and Systems—Intelligent Computing; Springer: Berlin/Heidelberg, Germany, 2021; pp. 922–929. [Google Scholar]
- Qi, Z.; Zhang, J.; Liu, D. A CNN-Based Method for Concreate Crack Detection in Underwater Environments. In Proceedings of the Construction Research Congress, Tempe, AZ, USA, 8–10 March 2020; pp. 566–575. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.; Zou, L.; Fu, J.; Ma, C.J. A novel crack detection algorithm of underwater dam image. In Proceedings of the 2012 International Conference on Systems and Informatics, ICSAI 2012, Yantai, China, 19–20 May 2012. [Google Scholar] [CrossRef]
- Zhang, Z.; Fan, X.; Xie, Y.; Xu, H. An edge detection method based artificial bee colony for underwater dam crack image. In Proceedings of the Biomedical Imaging and Sensing Conference, Yokohama, Japan, 25–27 April 2018; p. 59. [Google Scholar] [CrossRef]
- O’Byrne, M.; Schoefs, F.; Pakrashi, V.; Ghosh, B. An underwater lighting and turbidity image repository for analysing the performance of image-based non-destructive techniques. Struct. Infrastruct. Eng. 2018, 14, 104–123. [Google Scholar] [CrossRef] [Green Version]
- Yuya, N.; Naoto, S.; Shinsuke, Y.; Kazuo, I. Crack Detection in a Concrete Structure Using an Underwater Vehicle. In Proceedings of the 2021 International Conference on Artificial Life and Robotics (ICAROB2021), Virtual event, 21–24 January 2021; pp. 777–781. [Google Scholar] [CrossRef]
- Fan, X.; Wu, J.; Shi, P.; Zhang, X.; Xie, Y. A novel automatic dam crack detection algorithm based on local-global clustering. Multimed. Tools Appl. 2018, 77, 26581–26599. [Google Scholar] [CrossRef]
- Chen, X.; Wu, G.; Hou, S.; Fan, J.; Dang, J.; Chen, Z. Development of Tactile Imaging for Underwater Structural Damage Detection. Sensors 2019, 18, 3925. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Y.; Zhang, H.; Wang, S.; Li, J. Image-Based Underwater Inspection System for Abrasion of Stilling Basin Slabs of Dam. Adv. Civ. Eng. 2019, 2019, 6924976. [Google Scholar] [CrossRef]
- Iwasaki, K.; Dobashi, Y.; Nishita, T. An Efficient Method for Rendering Underwater Optical Effects Using Graphics Hardware. Comput. Graph. Forum 2002, 21, 701–711. [Google Scholar] [CrossRef]
- Nishita, T.; Nakamae, E. Method of Displaying Optical Effects within Water Using Accumulation Buffer. In Proceedings of the SIGGRAPH ’94: 21st Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 24–29 July 1994; pp. 373–379. [Google Scholar] [CrossRef]
- Schooley, A.H. A Simple Optical Method for Measuring the Statistical Distribution of Water Surface Slopes. J. Opt. Soc. Am. 1954, 44, 37–40. [Google Scholar] [CrossRef]
- Chen, J.; Xiong, F.; Zhu, Y.; Yan, H. A crack detection method for underwater concrete structures using sensing-heating system with porous casing. Measurement 2021, 168, 108332. [Google Scholar] [CrossRef]
- Zhu, Y.; Chen, J.; Zhang, Y.; Xiong, F.; He, F.; Fang, X. Temperature tracer method for crack detection in underwater concrete structures. Struct. Control Health Monit. 2020, 27, e2595. [Google Scholar] [CrossRef]
- Zhang, C.; Chen, J.; Luo, Y.; Xiong, F.; Xu, A. Crack width identification for underwater concrete structures using temperature tracer method. Meas. Sci. Technol. 2021, 32, 125107. [Google Scholar] [CrossRef]
- Yi, N.H.; Nam, J.W.; Kim, S.B.; Kim, I.S.; Kim, J.H.J. Evaluation of material and structural performances of developed Aqua-Advanced-FRP for retrofitting of underwater concrete structural members. Constr. Build. Mater. 2010, 24, 566–576. [Google Scholar] [CrossRef]
- Yan, Q.; Xu, Y.; Zhang, W.; Geng, P.; Yang, W. Numerical analysis of the cracking and failure behaviors of segmental lining structure of an underwater shield tunnel subjected to a derailed high-speed train impact. Tunn. Undergr. Space Technol. 2018, 72, 41–54. [Google Scholar] [CrossRef]
- Moradloo, A.; Adib, A.; Pirooznia, A. Damage Analysis of Arch Concrete Dams Subjected to Underwater Explosion. Appl. Math. Model. 2019, 75, 709–734. [Google Scholar] [CrossRef]
- Lins, R.G.; Givigi, S.N. Automatic Crack Detection and Measurement Based on Image Analysis. IEEE Trans. Instrum. Meas. 2016, 65, 583–590. [Google Scholar] [CrossRef]
- Shi, P.; Fan, X.; Ni, J.; Wang, G. A detection and classification approach for underwater dam cracks. Struct. Health Monit. 2016, 15, 541–554. [Google Scholar] [CrossRef]
- Miura, T.; Sato, K.; Nakamura, H. Influence of primary cracks on static and fatigue compressive behavior of concrete under water. Constr. Build. Mater. 2021, 305, 124755. [Google Scholar] [CrossRef]
- Sheerin Sitara, N.; Kavitha, S.; Raghuraman, G. Review and Analysis of Crack Detection and Classification Techniques based on Crack Types. Int. J. Appl. Eng. Res. 2021, 13, 6056–6062. [Google Scholar] [CrossRef]
- Orinaitė, U.; Palevičius, P.; Pal, M.; Ragulskis, M. A deep learning-based approach for automatic detection of concrete cracks below the waterline. Vibroeng. Procedia 2022, 44, 142–148. [Google Scholar] [CrossRef]
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, A.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). Deutches Hydrographisches Institut 1973. Available online: http://resolver.tudelft.nl/uuid:f204e188-13b9-49d8-a6dc-4fb7c20562fc (accessed on 21 May 2023).
- Özgenel, F. Concrete crack images for classification. Mendeley Data 2019, 2. [Google Scholar] [CrossRef]
- Petrauskiene, V.; Pal, M.; Cao, M.; Wang, J.; Ragulskis, M. Color Recurrence Plots for Bearing Fault Diagnosis. Sensors 2022, 22, 8870. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Parameters Used for Training Network | Overall Accuracy for Concrete Crack Dataset | Overall Accuracy for Underwater Crack Dataset | Validation Accuracy | Training Time | Epoch | Maximum Iterations | Iterations per Epoch | Frequency | Learning Rate |
|---|---|---|---|---|---|---|---|---|---|---|
| SqueezeNet | ||||||||||
| 1. | Training—0.1, Testing—0.1, Validation—0.1 | 99.2% | 84% | 97.78% | 54 min 29 s | 6 | 186 | 31 | 30 iterations | 0.001 |
| 2. | Training—0.15, Testing—0.15, Validation—0.1 | 98% | 70% | 97.80% | 87 min 23 s | 6 | 276 | 46 | 30 iterations | 0.001 |
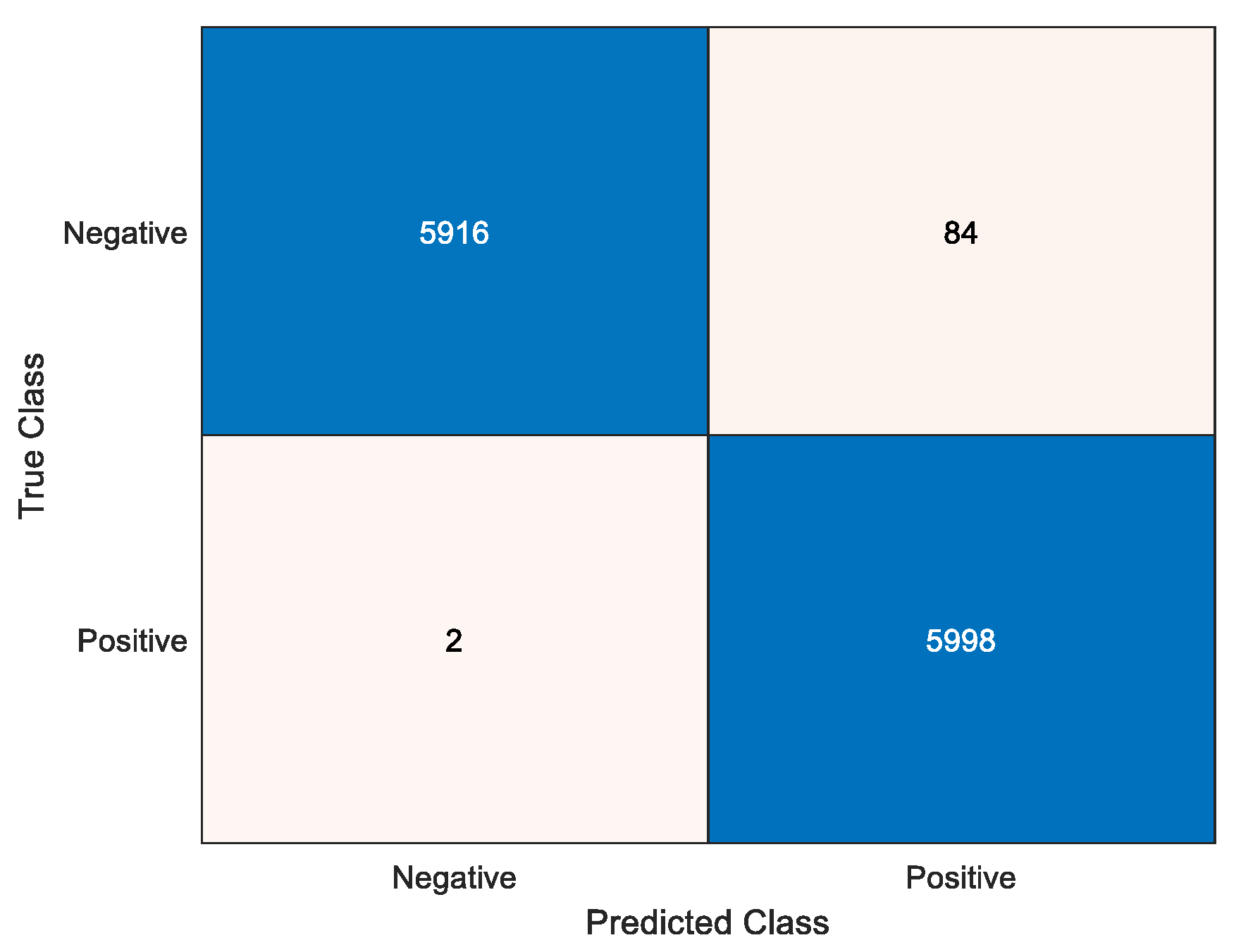
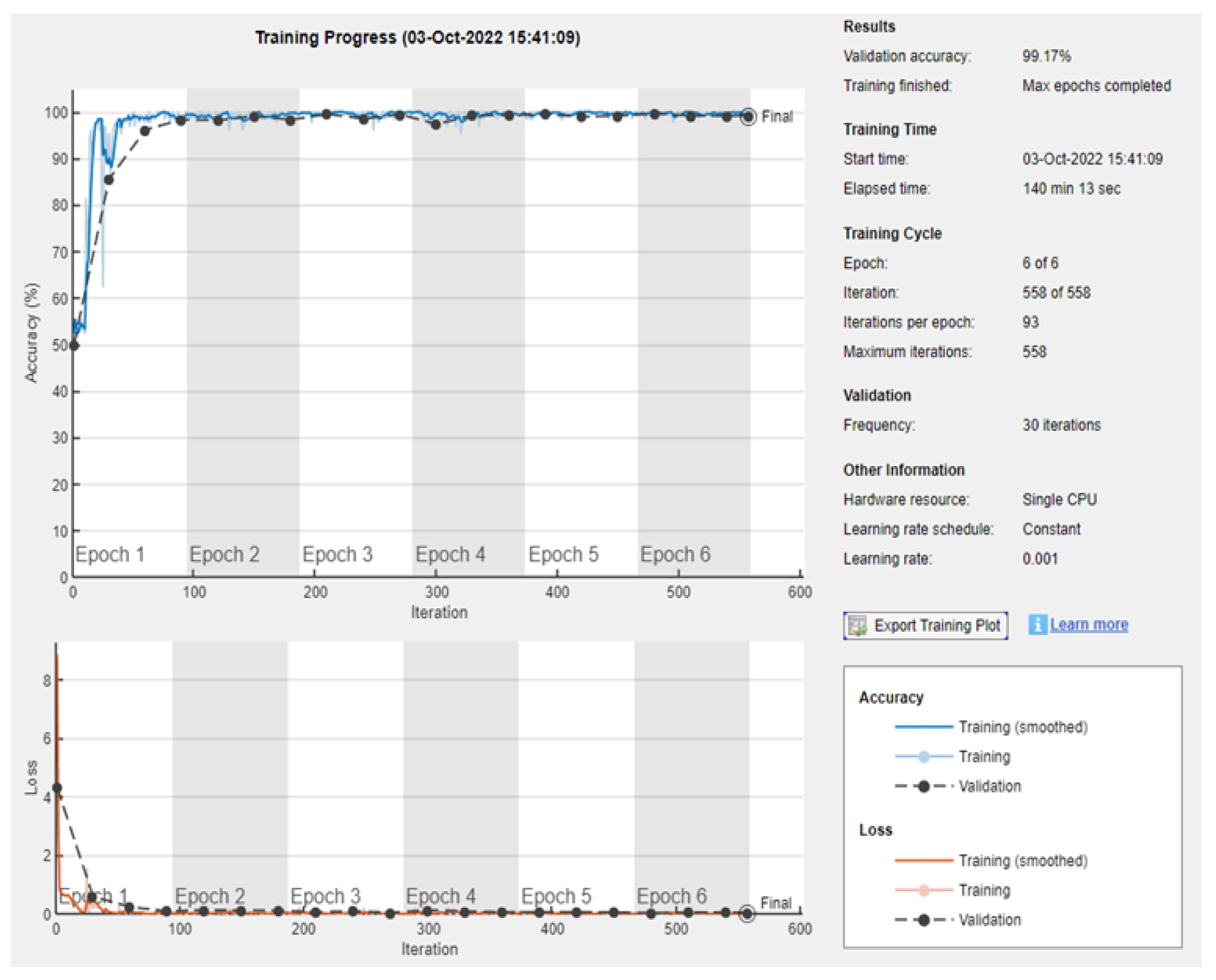
| 3. | Training—0.3, Testing—0.3, Validation—0.3 | 99.3% | 61% | 99.17% | 104 min 13 s | 6 | 558 | 93 | 30 iterations | 0.001 |
| AlexNet | ||||||||||
| 1. | Training—0.1, Testing—0.1, Validation—0.1 | 99.5% | 79% | 99.75% | 39 min 47 s | 6 | 186 | 31 | 30 iterations | 0.001 |
| 2. | Training—0.15, Testing—0.15, Validation—0.1 | 99.7% | 87% | 99.72% | 56 min 19 s | 6 | 276 | 46 | 30 iterations | 0.001 |
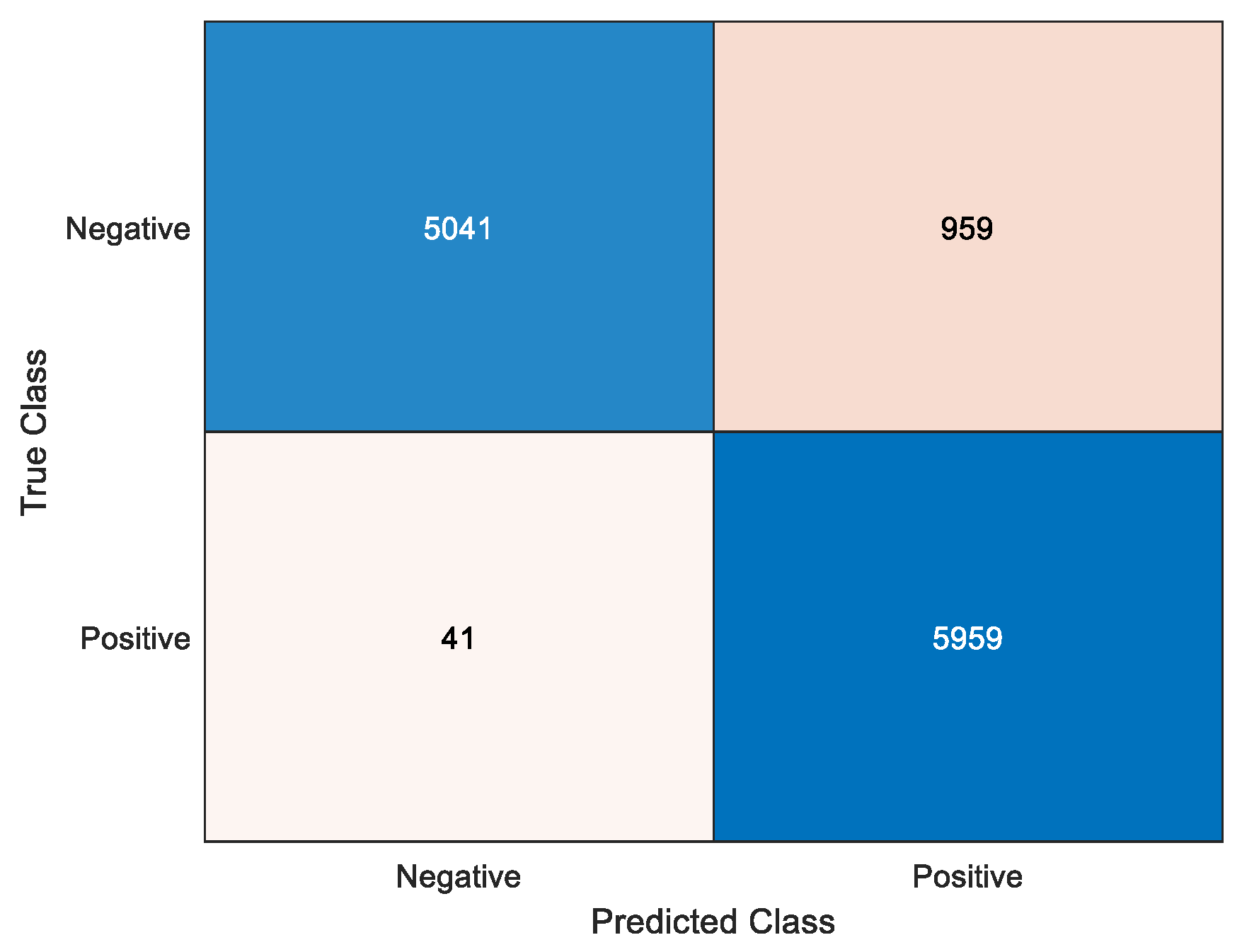
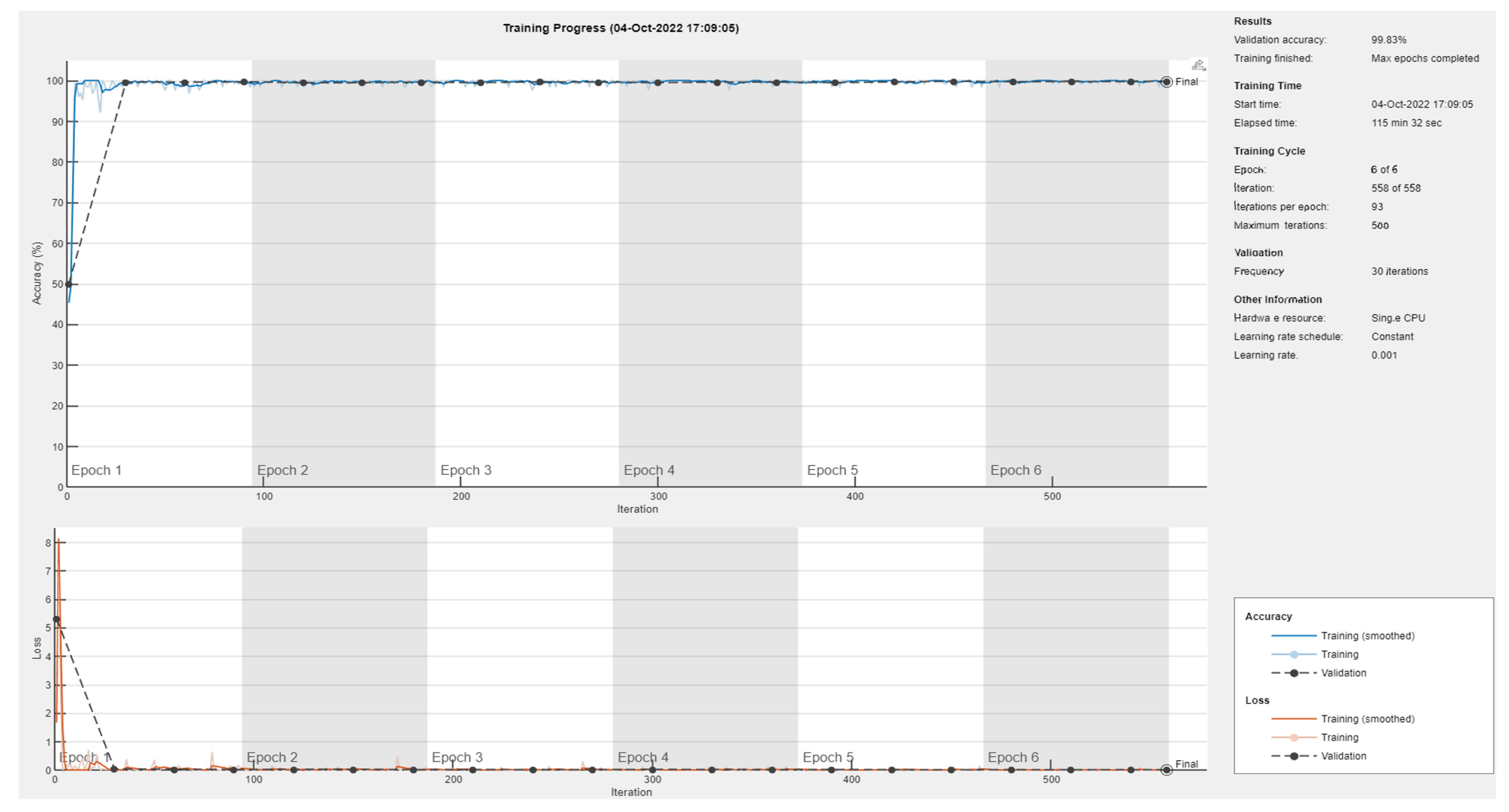
| 3. | Training—0.3, Testing—0.3, Validation—0.3 | 99.7% | 92% | 99.83% | 115 min 32 s | 6 | 558 | 93 | 30 iterations | 0.001 |
| Index | Parameters Used for Training Network | Overall Accuracy for Underwater Crack Dataset | Validation Accuracy | Training Time | Epoch | Maximum Iterations | Iterations per Epoch | Frequency | Learning Rate |
|---|---|---|---|---|---|---|---|---|---|
| SqueezeNet | |||||||||
| 1. | Training—0.1, Testing—0.1, Validation—0.1 | 98.25% | 99.12% | 74 min 54 s | 6 | 186 | 31 | 30 iterations | 0.001 |
| 2. | Training—0.15, Testing—0.15, Validation—0.1 | 99.1% | 99.20% | 124 min 27 s | 6 | 276 | 46 | 30 iterations | 0.001 |
| 3. | Training—0.3, Testing—0.3, Validation—0.3 | 99.6% | 99.45% | 282 min 49 s | 6 | 558 | 93 | 30 iterations | 0.001 |
| AlexNet | |||||||||
| 1. | Training—0.1, Testing—0.1, Validation—0.1 | 99.6% | 99.62% | 460 min 20 s | 6 | 186 | 31 | 30 iterations | 0.001 |
| 2. | Training—0.15, Testing—0.15, Validation—0.1 | 99.5% | 99.47% | 450 min 51 s | 6 | 276 | 46 | 30 iterations | 0.001 |
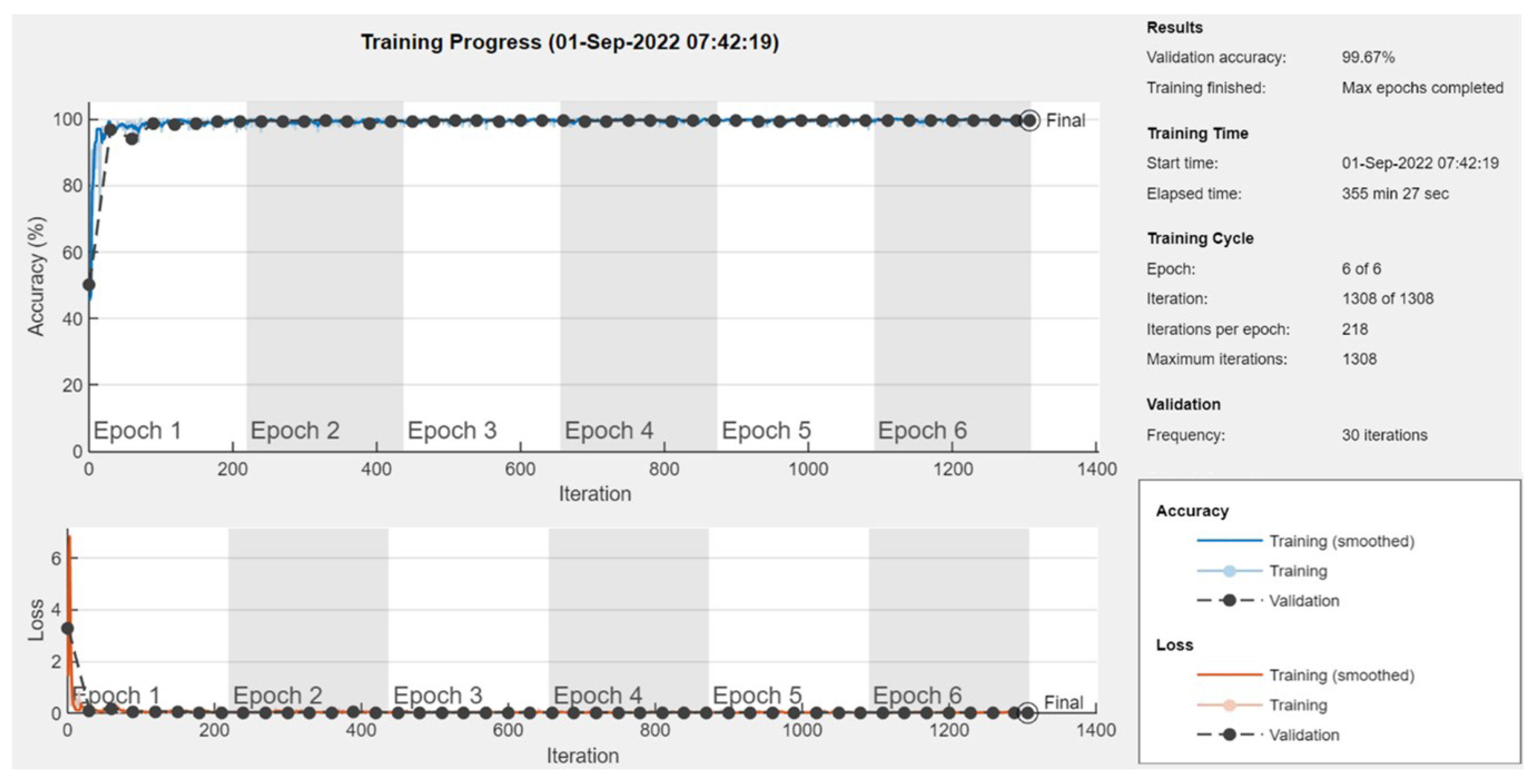
| 3. | Training—0.3, Testing—0.3, Validation—0.3 | 99.7% | 99.67% | 355 min 27 s | 6 | 558 | 93 | 30 iterations | 0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orinaitė, U.; Karaliūtė, V.; Pal, M.; Ragulskis, M. Detecting Underwater Concrete Cracks with Machine Learning: A Clear Vision of a Murky Problem. Appl. Sci. 2023, 13, 7335. https://doi.org/10.3390/app13127335
Orinaitė U, Karaliūtė V, Pal M, Ragulskis M. Detecting Underwater Concrete Cracks with Machine Learning: A Clear Vision of a Murky Problem. Applied Sciences. 2023; 13(12):7335. https://doi.org/10.3390/app13127335
Chicago/Turabian StyleOrinaitė, Ugnė, Viltė Karaliūtė, Mayur Pal, and Minvydas Ragulskis. 2023. "Detecting Underwater Concrete Cracks with Machine Learning: A Clear Vision of a Murky Problem" Applied Sciences 13, no. 12: 7335. https://doi.org/10.3390/app13127335
APA StyleOrinaitė, U., Karaliūtė, V., Pal, M., & Ragulskis, M. (2023). Detecting Underwater Concrete Cracks with Machine Learning: A Clear Vision of a Murky Problem. Applied Sciences, 13(12), 7335. https://doi.org/10.3390/app13127335