
Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Structure and Working Principle of the Soil Crushing and Separating Device
2.2. Raw Materials
2.2.1. Potato Modeling
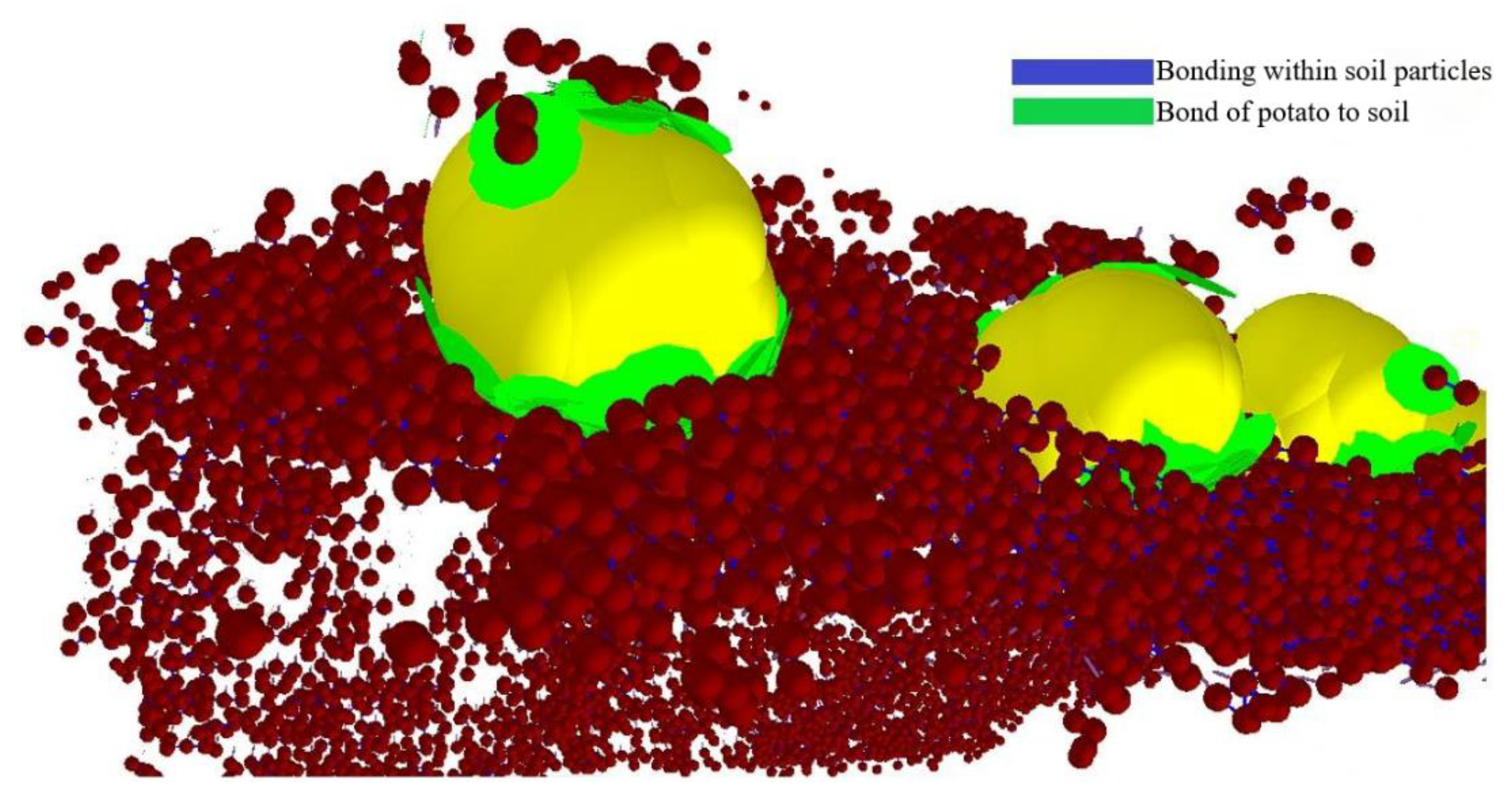
2.2.2. Modeling of Potato Soil Agglomerates
2.2.3. Soil Crushing and Separation Mechanism Modeling
2.2.4. The Setting of Discrete Element Simulation Parameters
2.3. Experimental Design
2.3.1. Single-Factor Experimental Design
2.3.2. Response Surface Experimental Design
2.3.3. Analysis of Experimental Evaluation Indicators
3. Results
3.1. Single-Factor Test Results and Analysis
3.2. Response Surface Test Results and Analysis
3.3. Parameter Optimization and Validation
4. Conclusions
- (1)
- Different models of potato soil agglomerates using particle bonding models provide a new method to study the fragmentation and separation of potato and soil;
- (2)
- Design-Expert was used to construct response surfaces for the potato soil agglomerate separation rate, the soil particle breakage ratio, and the soil particle bond breakage ratio. The relationships between blade speed, lift chain bar line speed, tilt angle, debris removal rate, the percentage of bond breakage between potato soil particles, and the percentage of bond breakage between soil particles were obtained;
- (3)
- The optimum parameters of the overburden rotating plate mechanism were verified through tests to be 0.307 m/s for the lift chain bar line speed, 0.4 m/s for the blade speed, and 40° for the tilt angle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wei, Z.; Su, G.; Li, X.; Wang, X.; Sun, F.; Meng, P. Parameter Optimization and Test of Potato Harvester Wavy Sieve Based on EDEM. J. Agric. Mach. 2020, 51, 109–122. [Google Scholar]
- Wen, M. Design and Test of Seed Arrangement Device of Conveyor Belt Potato Planter. Master’s Thesis, Sichuan Agricultural University, Ya’an, China, 2021. [Google Scholar]
- Sun, H. Design and Experimental Research on Transporting and Separating Device of Lifting Chain Potato Digger. Master’s Thesis, Northeast Agricultural University, Harbin, China, 2019. [Google Scholar]
- Zhang, Z. Experimental Study and Simulation Analysis on Vibration Damage of Potato during Transportation. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]
- Wang, Y. Simulation Analysis and Experimental Study on Acceleration Characteristics of Potato in Potato Soil Separation Unit. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]
- Li, P. Development and Performance Test of Three-Stage Six-Boom Swing Separation Sieve. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]
- Wei, M. The Design and Simulation Analysis of Key Components of the Roller Potato Harvester. Master’s Thesis, Hubei University of Technology, Wuhan, China, 2018. [Google Scholar]
- Yang, R.; Yang, H.; Shang, S.; Ni, Z.; Liu, Z.; Guo, D. Design and Experiment of Vertical Circular Separating and Conveying Device for Potato Combine Harvester. Trans. Chin. Soc. Agric. Eng. 2018, 34, 10–18. [Google Scholar]
- Zi, Z.; Jin, J.; Chang, Z.; Qun, Y.; Xiu, S. Design and Experimental Study on The Conveying Chain Soil Cleaning Device of Potato Harvester. J. Agric. Mech. Res. 2016, 2, 123–127. [Google Scholar]
- Hu, G. Discrete Element Method Analysis and Simulation of Particle System: Industrial Application of Discrete Element Method and Introduction to EDEM Software; Wuhan University of Technology Press: Wuhan, China, 2010. [Google Scholar]
- Cundalll, P.A. A discrete numerical model for granular assemblies. Geotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Huang, W. Parameter calibration of discrete element model for sandy soil particles. Fujian Build. Mater. 2023, 2, 1–5. [Google Scholar]
- Li, J.; Xie, S.; Liu, F.; Guo, Y.; Liu, C.; Shang, Z.; Zhao, X. Calibration and Testing of Discrete Element Simulation Parameters for Sandy Soils in Potato Growing Areas. Appl. Sci. 2022, 12, 10125. [Google Scholar] [CrossRef]
- Jiang, Y.; Hong, Y.; Ni, J. Micro-Investigation of Shear Strength of Sand Based on Discrete Element Method. Low Temp. Constr. Technol. 2022, 44, 96–101. [Google Scholar]
- Alfaris Murtadha, A.; Almaliki Salim, A. Effect of Tillage Depth and Lateral Distance of Shallow Plows on the Mean Weight Diameter and the Energy of Soil Fragmentation by Using Locally Manufactured Subsoiler Plow. IOP Conf. Ser. Earth Environ. Sci 2022, 1060, 012129. [Google Scholar] [CrossRef]
- Tagar, A.A.; Adamowski, J.; Memon, M.S.; Do, M.C.; Mashori, A.S.; Soomro, A.S.; Bhayo, W.A. Soil fragmentation and aggregate stability as affected by conventional tillage implements and relations with fractal dimensions. Soil Tillage Res. 2020, 197, 104494. [Google Scholar] [CrossRef]
- da Silva Martinez, A.; Seidel, E.P.; Pan, R.; Brito, T.S.; Meiners, W. Crop rotation and soil scarification: Impacts in the soil penetration resistance. Commun. Plant Sci. 2019, 10, 26814. [Google Scholar]
- Zhao, B.; Men, L.; Song, L.; Wang, Y.; Ye, J.; Jiang, H.; Liu, Y.; Luo, J.; Guo, J.; Guo, X. Mechanical properties analysis and experiment on Multi-order excavation shovel of Ophiopogon japonicas harvester. J. Phys. Conf. Ser. 2021, 1986, 012016. [Google Scholar] [CrossRef]
- Li, Y.; Fan, J.; Hu, Z.; Luo, W.; Yang, H.; Shi, L.; Wu, F. Calibration of Discrete Element Model Parameters of Soil around Tubers during Potato Harvesting Period. Agriculture 2022, 12, 1475. [Google Scholar] [CrossRef]
- Chen, L.; Xue, J. Research on the calibration method of cassava seed stem simulation parameters based on discrete elements. Jiangsu Agric. Sci. 2023, 51, 198–205. [Google Scholar]
- Liu, Y.; Zhao, J. Parameters calibration of discrete element of clay soil in yam planting area. J. Hebei Agric. Univ. 2021, 44, 99–105. [Google Scholar]
- Liu, Y. Model Construction of Root—Soil Complex of Yam and Experimental Study on de—Soiling. Master’s Thesis, Hebei Agricultural University, Baoding, China, 2021. [Google Scholar]
- Liu, W.; He, J. Calibration of Simulation Parameters for Potato Minituber Based on EDEM. Trans. Chin. Soc. Agric. Mach. 2018, 49, 125–135+142. [Google Scholar]
- Liu, G. Experimental Study on Potato Motion Characteristics during Potato Soil Separation Process. Master’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]
- Zhang, Q. Analysis of Potato Collision Problem and Research and Development of Key Components of Separator Based on Discrete Element. Master’s Thesis, Shandong University of Science and Technology, Zibo, China, 2022. [Google Scholar]
- Song, Z.; Li, H.; Yan, Y. Calibration Method of Contact Characteristic Parameters of Soil in Mulberry Field Based on Unequaldiameter Particles DEM Theory. Trans. Chin. Soc. Agric. Mach. 2022, 53, 21–33. [Google Scholar]
- Wu, T.; Huang, W.; Chen, X.; Ma, X.; Han, Z.; Pan, T. Calibration of discrete element model parameters for cohesive soil considering the cohesion between particles. J. South China Agric. Univ. 2017, 38, 93–98. [Google Scholar]
- Tao, L.; Shi, Y.; Huang, L.; Lin, S.; Liu, Y.; Li, X. Parameter Calibration of Soil Discrete Element Simulation Model for Sugarcane Cultivation in Guangxi Coastal Area. Acta Agric. Jiangxi 2022, 34, 94–100. [Google Scholar]
- Yu, C. Study on the Failure Mechanism of High Slope of Soil Roadbed Based on Particle Discrete Element Method. Traffic Eng. Technol. Natl. Def. 2022, 20, 19–22. [Google Scholar]
- Fan, W.; Zhang, F.; Yan, J.; Zheng, L.; Pan, D.; Han, Z. Discrete element simulation calibration and testing of the interaction between clay and loose soil components. J. Agric. Mech. Res. 2024, 46, 177–182+190. [Google Scholar]
- Zhang, C.; Hu, X.; Liu, J.; Yang, Y.; Li, Y. Calibration and Verification of Bonding Parameters of Banana Straw Simulation Model Based on Discrete Element Method. Trans. Chin. Soc. Agric. Mach. 2023, 54, 121–130. [Google Scholar]
- Li, Q.; Zheng, X.; Liu, J.; Yang, H.; Wang, Z.; Zhang, L. Calibration of Discrete Element Simulation Parameters for Farmland Silt in Xinjiang. Xinjiang Agric. Sci. 2022, 59, 2014–2024. [Google Scholar]
- Zhang, S.; Zhou, J.; Liu, H.; Shi, S.; Wei, G.; He, T. Determination of Interspecific Contact Parameters of Corner Simulation Calibration of Discrete Element. Trans. Chin. Soc. Agric. Mach. 2022, 53, 69–77. [Google Scholar]
- Meng, J.; Wang, C. Modeling and motion simulation analysis of potato based on 3D scanning. J. Agric. Mech. Res. 2015, 37, 64–67. [Google Scholar]
- Ucgul, M.; Fielke, J.M.; Saunders, C. Three dimensional discrete element modeling DEM of tillage accounting for soil cohesion and adhesion. Biosyst. Eng. 2015, 129, 298–306. [Google Scholar] [CrossRef]
- Deng, W. Study on the Collision Damage Characteristics and Peel Friction Damage Mechanisms of Potato Tubers. Doctor’s Thesis, Inner Mongolia Agricultural University, Hohhot, China, 2022. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Materials | Poisson’s Ratio υ | Shear Modulus G/Pa | Density ρ/kg·m−3 |
|---|---|---|---|
| Potatoes | 0.49 | 1.12 × 106 | 1120 |
| 65Mn | 0.30 | 7.92 × 1010 | 7650 |
| Soil | 0.30 | 4.62 × 105 | 1500 |
| Rubber | 0.47 | 2.67 × 106 | 910 |
| Recovery Factor | Static Friction Coefficient | Rolling Friction Coefficient | |
|---|---|---|---|
| Potato with 65Mn | 0.40 | 0.31 | 0.03 |
| Potatoes and potatoes | 0.31 | 0.39 | 0.04 |
| Potato and rubber | 0.31 | 0.62 | 0.05 |
| Soil with 65Mn | 0.16 | 0.60 | 0.35 |
| Soil and potatoes | 0.06 | 0.50 | 0.01 |
| Soil and rubber | 0.10 | 0.80 | 0.50 |
| Soil and soil | 0.13 | 0.56 | 0.27 |
| Parameters | Numerical Value | Unit |
|---|---|---|
| Normal stiffness per unit area | 1.7 × 108 | N·m−3 |
| Tangential stiffness per unit area | 9 × 107 | N·m−3 |
| Normal critical stress | 45,000 | Pa |
| Tangential critical stress | 6000 | Pa |
| Tests | Tilt Angle/° | Blade Speed/ m·s−1 | Lift Chain Bar Line Speed/m·s−1 | Blade Rack Type |
|---|---|---|---|---|
| 1 2 3 | 45 | 0.6 | 0.302 | Triangular rack blade Rectangular rack blade Oblique rack blade |
| 4 | 30 | 0.6 | 0.302 | Triangular rack blade |
| 5 | 37.5 | |||
| 6 | 45 | |||
| 7 | 52.5 | |||
| 8 | 60 | |||
| 9 | 45 | 0.4 | ||
| 10 | 0.5 | |||
| 11 | 0.6 | |||
| 12 | 0.7 | |||
| 13 | 0.8 | |||
| 14 | 45 | 0.6 | 0.151 | |
| 15 | 0.226 | |||
| 16 | 0.302 | |||
| 17 | 0.377 | |||
| 18 | 0.453 |
| Tests | Factors | ||
|---|---|---|---|
| Tilt Angle/° | Blade Speed/m·s−1 | Lift Chain Bar Line Speed/m·s−1 | |
| −1 | 30 | 0.4 | 0.151 |
| 0 | 45 | 0.6 | 0.302 |
| 1 | 60 | 0.8 | 0.453 |
| Tests | Tilt Angle/° | Blade Speed/m·s−1 | Lift Chain Bar Line Speed/m·s−1 |
|---|---|---|---|
| 1 | 30 | 0.4 | 0.302 |
| 2 | 45 | 0.6 | 0.302 |
| 3 | 45 | 0.6 | 0.302 |
| 4 | 45 | 0.6 | 0.302 |
| 5 | 60 | 0.8 | 0.302 |
| 6 | 30 | 0.6 | 0.453 |
| 7 | 60 | 0.4 | 0.302 |
| 8 | 45 | 0.6 | 0.302 |
| 9 | 30 | 0.6 | 0.151 |
| 10 | 45 | 0.6 | 0.302 |
| 11 | 45 | 0.8 | 0.151 |
| 12 | 45 | 0.4 | 0.453 |
| 13 | 45 | 0.4 | 0.151 |
| 14 | 60 | 0.6 | 0.151 |
| 15 | 60 | 0.6 | 0.453 |
| 16 | 45 | 0.8 | 0.453 |
| 17 | 30 | 0.8 | 0.302 |
| Tests | Tilt Angle/ ° | Blade Speed/ m·s−1 | Lift Chain Bar Line Speed/ m·s−1 | The Debris Removal Rate/% | The Percentage of Bond Breakage between Potato Soil Particles/% | The Percentage of Bond Breakage between Soil Particles/% |
|---|---|---|---|---|---|---|
| 1 | 30 | 0.4 | 0.302 | 99.2 | 100.0 | 95.0 |
| 2 | 45 | 0.6 | 0.302 | 94.0 | 97.3 | 97.6 |
| 3 | 45 | 0.6 | 0.302 | 93.8 | 97.2 | 97.4 |
| 4 | 45 | 0.6 | 0.302 | 94.2 | 97.4 | 97.4 |
| 5 | 60 | 0.8 | 0.302 | 92.7 | 96.9 | 97.5 |
| 6 | 30 | 0.6 | 0.453 | 93.1 | 96.8 | 97.2 |
| 7 | 60 | 0.4 | 0.302 | 85.6 | 100.0 | 93.6 |
| 8 | 45 | 0.6 | 0.302 | 94.2 | 97.3 | 97.5 |
| 9 | 30 | 0.6 | 0.151 | 97.4 | 99.1 | 97.1 |
| 10 | 45 | 0.6 | 0.302 | 94.1 | 97.1 | 97.7 |
| 11 | 45 | 0.8 | 0.151 | 91.7 | 96.4 | 95.9 |
| 12 | 45 | 0.4 | 0.453 | 97.8 | 97.6 | 99.6 |
| 13 | 45 | 0.4 | 0.151 | 98.9 | 100.0 | 98.2 |
| 14 | 60 | 0.6 | 0.151 | 83.7 | 92.7 | 90.7 |
| 15 | 60 | 0.6 | 0.453 | 83.2 | 96.4 | 91.7 |
| 16 | 45 | 0.8 | 0.453 | 90.0 | 91.1 | 95.8 |
| 17 | 30 | 0.8 | 0.302 | 91.5 | 94.7 | 96.4 |
| Tests | Tilt Angle/ ° | Blade Speed/m·s−1 | Lift Chain Bar Line Speed/ m·s−1 | The Debris Removal Rate/% | The Percentage of Bond Breakage between Potato Soil Particles/% | The Percentage of Bond Breakage between Soil Particles/% |
|---|---|---|---|---|---|---|
| 1 | 98.9 | 100.0 | 100.0 | |||
| 2 | 40 | 0.4 | 0.307 | 99.4 | 99.6 | 99.7 |
| 3 | 99.1 | 98.5 | 99.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, D.; Deng, W.; Xie, S.; Liu, C.; Ren, Z.; Zhao, H.; Cai, Y.; Zhao, Z. Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation. Appl. Sci. 2023, 13, 8416. https://doi.org/10.3390/app13148416
Yan D, Deng W, Xie S, Liu C, Ren Z, Zhao H, Cai Y, Zhao Z. Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation. Applied Sciences. 2023; 13(14):8416. https://doi.org/10.3390/app13148416
Chicago/Turabian StyleYan, Dong, Weigang Deng, Shengshi Xie, Chenglong Liu, Zhiqi Ren, Haohao Zhao, Yansong Cai, and Zexin Zhao. 2023. "Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation" Applied Sciences 13, no. 14: 8416. https://doi.org/10.3390/app13148416
APA StyleYan, D., Deng, W., Xie, S., Liu, C., Ren, Z., Zhao, H., Cai, Y., & Zhao, Z. (2023). Discrete Element-Based Simulation Analysis and Research of Potato Soil Agglomerate Fragmentation and Separation. Applied Sciences, 13(14), 8416. https://doi.org/10.3390/app13148416