
Strain Gauge Neural Network-Based Estimation as an Alternative for Force and Torque Sensor Measurements in Robot Manipulators




Abstract
:1. Introduction
2. Related Work and Contributions
2.1. Neural Networks for Force Estimation in Robotics
2.2. Strain Gauges for Force Measurements in Robotics
- Development of a general and simple method for estimation of end-effector interaction forces for complex real robots using an array of 1D strain gauges and deep neural networks. The method does not require special calibration nor the knowledge of the (exact) robot model.
- Estimation of robot joint torques through the implicit robot model, learned via deep neural networks using the developed method.
- Experimental verification of the proposed approach in comparison to the 6-axis force–torque sensor, through extensive testing.
3. Materials and Methods
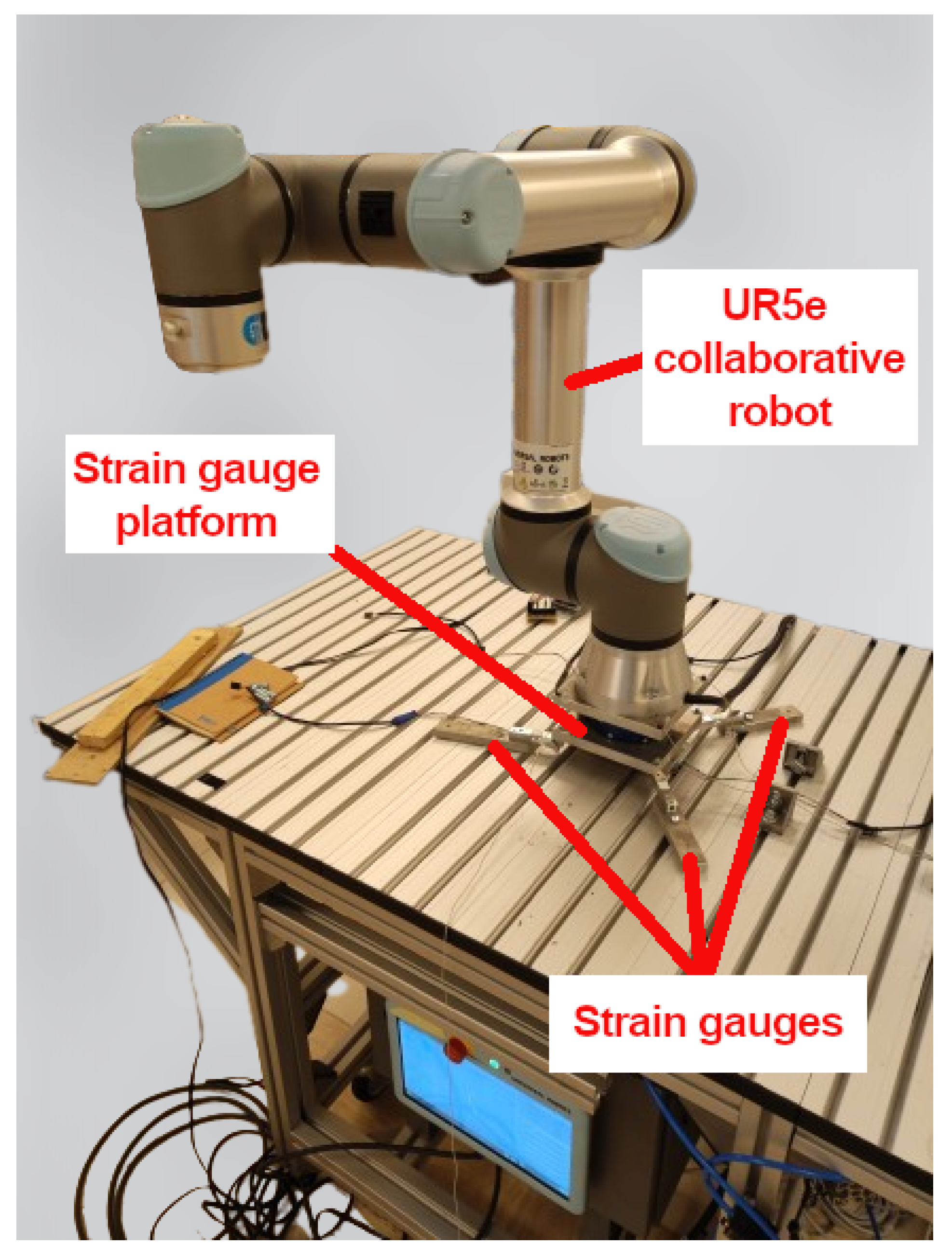
3.1. Data Collection
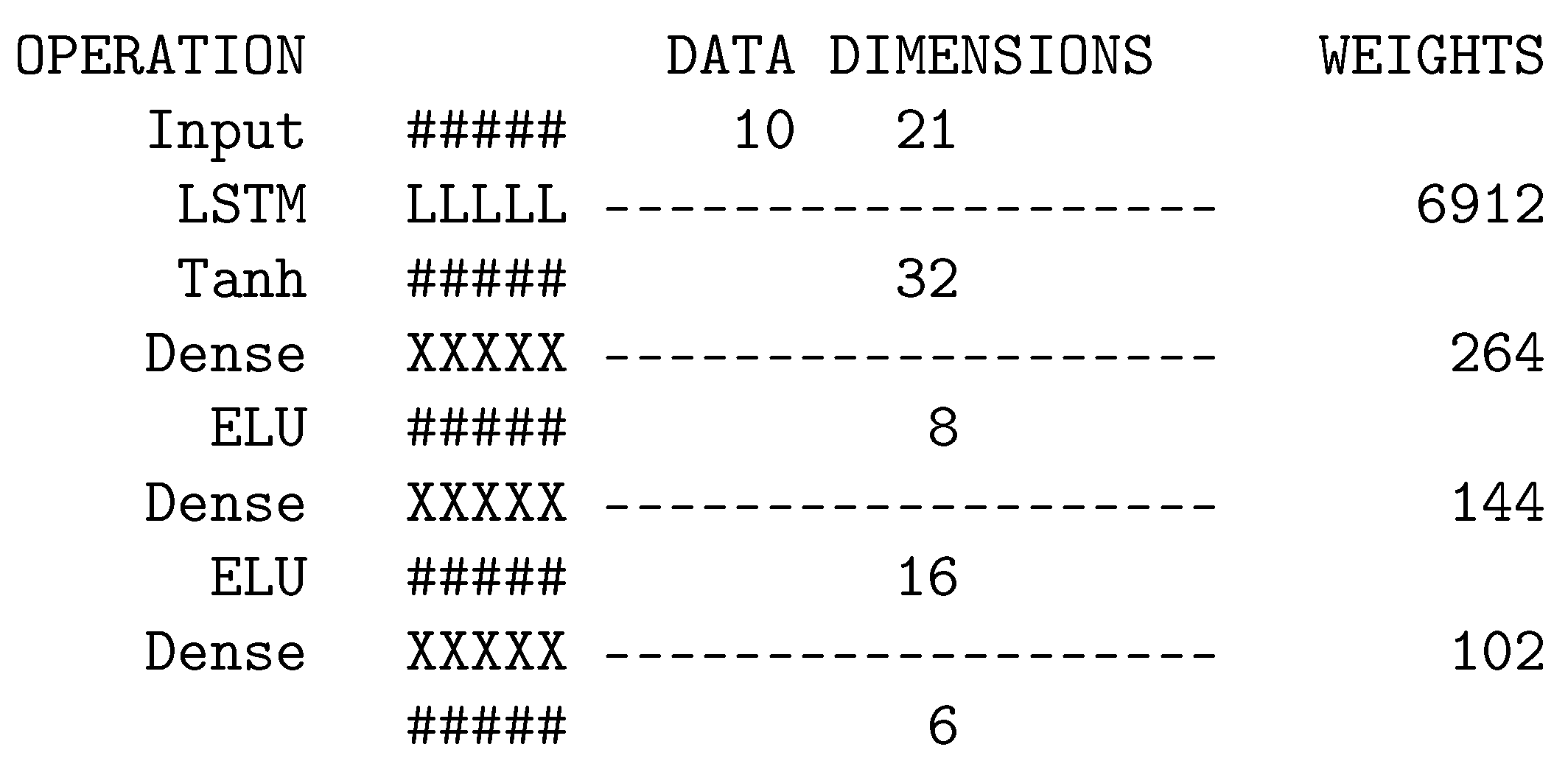
3.2. Neural Networks
4. Results and Discussion
4.1. End-Effector Force Estimation
4.2. Joint-Side Torque Estimation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 1D | 1-dimensional |
| 2D | 2-dimensional |
| 3D | 3-dimensional |
| 6D | 6-dimensional |
| A/D | Analog-to-Digital |
| CNN | Convolutional Neural Network |
| DeLaN | Deep Lagrangian Network |
| DoF | Degrees of Freedom |
| ELU | Exponential Linear Unit |
| LNN | Lagrangian Neural network |
| LSTM | Long-short Term Memory |
| MLP | Multilayer Perceptron |
| MSE | Mean Square Error |
| NRMSE | Normalised Root Mean Square Error |
| ReLU | Rectified Linear Unit |
| RMSE | Root Mean Square Error |
References
- Mordor Intelligence. Global Robotics Market-Growth, Trends, COVID-19 Impact, And Forecasts (2021–2026). 2020. Available online: https://www.mordorintelligence.com/industry-reports/robotics-market (accessed on 21 October 2021).
- Siciliano, B.; Villani, L. Robot Force Control; Springer: Greer, SC, USA, 1999. [Google Scholar] [CrossRef]
- Liu, X.; Zuo, G.; Zhang, J.; Wang, J. Sensorless force estimation of end-effect upper limb rehabilitation robot system with friction compensation. Int. J. Adv. Robot. Syst. 2019, 16, 1729881419856132. [Google Scholar] [CrossRef]
- Wahrburg, A.; Bos, J.; Listmann, K.D.; Dai, F.; Matthias, B.; Ding, H. Motor-Current-Based Estimation of Cartesian Contact Forces and Torques for Robotic Manipulators and Its Application to Force Control. IEEE Trans. Autom. Sci. Eng. 2018, 15, 879–886. [Google Scholar] [CrossRef]
- Sereinig, M.; Werth, W.; Faller, L.M. A review of the challenges in mobile manipulation: Systems design and RoboCup challenges. Electr. Comput. Eng. 2020, 137, 297–308. [Google Scholar] [CrossRef]
- Feng, Z.; Hu, G.; Sun, Y.; Soon, J. An overview of collaborative robotic manipulation in multi-robot systems. Annu. Rev. Control 2020, 49, 113–127. [Google Scholar] [CrossRef]
- Kružić, S.; Musić, J.; Kamnik, R.; Papić, V. Estimating Robot Manipulator End-effector Forces using Deep Learning. In Proceedings of the 2020 43rd International Convention on Information, Communication and Electronic Technology (MIPRO), Opatija, Croatia, 28 September–2 October 2020. [Google Scholar] [CrossRef]
- Kružić, S.; Musić, J.; Kamnik, R.; Papić, V. End-Effector Force and Joint Torque Estimation of a 7-DoF Robotic Manipulator Using Deep Learning. Electronics 2021, 10, 2963. [Google Scholar] [CrossRef]
- Hoffmann, K. An Introduction to Measurement Using Strain Gauges; Hottinger Baldwin: Darmstadt, Germany, 1989. [Google Scholar]
- Sebastian, G.; Li, Z.; Crocher, V.; Kremers, D.; Tan, Y.; Oetomo, D. Interaction Force Estimation Using Extended State Observers: An Application to Impedance-Based Assistive and Rehabilitation Robotics. IEEE Robot. Autom. Lett. 2019, 4, 1156–1161. [Google Scholar] [CrossRef]
- Alcocer, A.; Robertsson, A.; Valera, A.; Johansson, R. Force estimation and control in robot manipulators. IFAC Proc. Vol. 2003, 36, 55–60. [Google Scholar] [CrossRef]
- Veil, C.; Müller, D.; Sawodny, O. Nonlinear disturbance observers for robotic continuum manipulators. Mechatronics 2021, 78, 102518. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Oboe, R.; Ohnishi, K. Disturbance Observer-Based Robust Control and Its Applications: 35th Anniversary Overview. IEEE Trans. Ind. Electron. 2020, 67, 2042–2053. [Google Scholar] [CrossRef]
- Stolt, A.; Linderoth, M.; Robertsson, A.; Johansson, R. Force controlled robotic assembly without a force sensor. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St. Paul, MN, USA, 14–18 May 2012. [Google Scholar] [CrossRef]
- Yu, X.; He, W.; Li, Q.; Li, Y.; Li, B. Human-Robot Co-Carrying Using Visual and Force Sensing. IEEE Trans. Ind. Electron. 2021, 68, 8657–8666. [Google Scholar] [CrossRef]
- Liu, S.; Wang, L.; Wang, X.V. Sensorless force estimation for industrial robots using disturbance observer and neural learning of friction approximation. Robot. Comput. Integr. Manuf. 2021, 71, 102168. [Google Scholar] [CrossRef]
- El Dine, K.M.; Sanchez, J.; Corrales, J.A.; Mezouar, Y.; Fauroux, J.C. Force-Torque Sensor Disturbance Observer Using Deep Learning. In Springer Proceedings in Advanced Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 364–374. [Google Scholar] [CrossRef]
- Levine, S.; Pastor, P.; Krizhevsky, A.; Ibarz, J.; Quillen, D. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection. Int. J. Robot. Res. 2017, 37, 421–436. [Google Scholar] [CrossRef]
- Jin, L.; Li, S.; Yu, J.; He, J. Robot manipulator control using neural networks: A survey. Neurocomputing 2018, 285, 23–34. [Google Scholar] [CrossRef]
- Smith, A.C.; Hashtrudi-Zaad, K. Application of neural networks in inverse dynamics based contact force estimation. In Proceedings of the 2005 IEEE Conference on Control Applications, Sydney, Austrlia, 4–7 July 2005. [Google Scholar] [CrossRef]
- Yilmaz, N.; Wu, J.Y.; Kazanzides, P.; Tumerdem, U. Neural Network based Inverse Dynamics Identification and External Force Estimation on the da Vinci Research Kit. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 1387–1393. [Google Scholar] [CrossRef]
- Aviles, A.I.; Alsaleh, S.; Sobrevilla, P.; Casals, A. Sensorless force estimation using a neuro-vision-based approach for robotic-assisted surgery. In Proceedings of the 2015 7th International IEEE/EMBS Conference on Neural Engineering (NER), Montpellier, France, 22–24 April 2015. [Google Scholar] [CrossRef]
- Chua, Z.; Jarc, A.M.; Okamura, A.M. Toward Force Estimation in Robot-Assisted Surgery using Deep Learning with Vision and Robot State. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 12335–12341. [Google Scholar] [CrossRef]
- Lutter, M.; Ritter, C.; Peters, J. Deep Lagrangian Networks: Using Physics as Model Prior for Deep Learning. In Proceedings of the International Conference on Learning Representations, New Orleans, LA, USA, 6–9 May 2019. [Google Scholar] [CrossRef]
- Cranmer, M.; Greydanus, S.; Hoyer, S.; Battaglia, P.; Spergel, D.; Ho, S. Lagrangian Neural Networks. arXiv 2020, arXiv:2003.04630. [Google Scholar] [CrossRef]
- Han, Y.; Li, R.; Chirikjian, G.S. Look at my new blue force-sensing shoes! In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2891–2896. [Google Scholar]
- Chua, Z.; Okamura, A.M. A Modular 3-Degrees-of-Freedom Force Sensor for Robot-Assisted Minimally Invasive Surgery Research. Sensors 2023, 23, 5230. [Google Scholar] [CrossRef] [PubMed]
- Schulze, J.S.; Fisher, C. Prototype of an Ultralow-Cost 2-D Force Sensor for Robotic Applications. IEEE Sens. Lett. 2021, 5, 2500404. [Google Scholar] [CrossRef]
- Andersson, T.; Kihlberg, A. Differential Drive Robot Platform with External Force Sensing Capabilities Intended for Logistic Tasks Set in a Hospital Environment. Master’s Thesis, Malardalen University, Vateras, Sweden, 2021. Available online: https://diva-portal.org/smash/get/diva2:1717478/FULLTEXT01.pdf (accessed on 28 August 2023).
- Hoang, P.H.; Thang, V.D.T. Design and simulation of flexure-based planar force/torque sensor. In Proceedings of the 2010 IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 28–30 June 2010; pp. 194–198. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Metta, G.; Sandini, G.; Vernon, D.; Beira, R.; Becchi, F.; Righetti, L.; Santos-Victor, J.; Ijspeert, A.J.; Carrozza, M.C.; et al. iCub: The design and realization of an open humanoid platform for cognitive and neuroscience research. Adv. Robot. 2007, 21, 1151–1175. [Google Scholar] [CrossRef]
- Gattringer, H.; Müller, A.; Hoermandinger, P. Design and Calibration of Robot Base Force/Torque Sensors and Their Application to Non-Collocated Admittance Control for Automated Tool Changing. Sensors 2021, 21, 2895. [Google Scholar] [CrossRef]
- Universal Robots. e-Series. Built to Do More. Brochure, 2021. Available online: https://www.universal-robots.com/media/1809365/05_2021_e-series_brochure_english_web_rgb_din-a4.pdf (accessed on 28 August 2023).
- Schäfer, M.B.; Meiringer, J.G.; Nawratil, J.; Worbs, L.; Giacoppo, G.A.; Pott, P.P. Estimating Gripping Forces During Robot- Assisted Surgery Based on Motor Current. Curr. Dir. Biomed. Eng. 2022, 8, 105–108. [Google Scholar] [CrossRef]
- Rojas, R.A.; Garcia, M.A.R.; Gualtieri, L.; Rauch, E. Combining safety and speed in collaborative assembly systems—An approach to time optimal trajectories for collaborative robots. Procedia CIRP 2021, 97, 308–312. [Google Scholar] [CrossRef]
- Raviola, A.; Guida, R.; Martin, A.D.; Pastorelli, S.; Mauro, S.; Sorli, M. Effects of Temperature and Mounting Configuration on the Dynamic Parameters Identification of Industrial Robots. Robotics 2021, 10, 83. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. arXiv 2017, arXiv:1412.6980. [Google Scholar] [CrossRef]
- Chollet, F. Keras. 2015. Available online: https://keras.io (accessed on 28 August 2023).
- Kapoor, A.; Gulli, A.; Pal, S.; Chollet, F. Deep Learning with TensorFlow and Keras Build and Deploy Supervised, Unsupervised, Deep, and Reinforcement Learning Models; Packt Publishing, Limited: Birmingham, UK, 2022. [Google Scholar]
- O’Malley, T.; Bursztein, E.; Long, J.; Chollet, F.; Jin, H.; Invernizzi, L. KerasTuner. 2019. Available online: https://github.com/keras-team/keras-tuner (accessed on 28 August 2023).
- Li, L.; Jamieson, K.; DeSalvo, G.; Rostamizadeh, A.; Talwalkar, A. Hyperband: A novel bandit-based approach to hyperparameter optimization. J. Mach. Learn. Res. 2018, 18, 1–52. [Google Scholar]
- Kim, U.; Jo, G.; Jeong, H.; Park, C.H.; Koh, J.S.; Park, D.I.; Do, H.; Choi, T.; Kim, H.S.; Park, C. A Novel Intrinsic Force Sensing Method for Robot Manipulators During Human–Robot Interaction. IEEE Trans. Robot. 2021, 37, 2218–2225. [Google Scholar] [CrossRef]
- Kružić, S.; Musić, J.; Stančić, I.; Papić, V. Neural Network-based End-effector Force Estimation for Mobile Manipulator on Simulated Uneven Surfaces. In Proceedings of the 2022 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 22–24 September 2022; pp. 1–6. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hyperparameter | Possible Values |
|---|---|
| Activation function | ReLU, ELU, Tanh |
| Number of LSTM layers | 1–3 |
| Number of cells per LSTM layer | 8–64, step 8 |
| Number of FC layers | 2–4 |
| Number of neurons per FC layer | 8–64, step 8 |
| # | System | Validation RMSE | Test RMSE |
|---|---|---|---|
| 1. | Force sensor | 2.1590 N | 2.0043 N |
| 2. | Strain gauges | 1.9226 N | 1.9447 N |
| # | System | Validation RMSE | Test RMSE |
|---|---|---|---|
| 1. | Force sensor | 2.9294 Nm | 3.0430 Nm |
| 2. | Strain gauges | 2.9137 Nm | 3.0063 Nm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kružić, S.; Musić, J.; Papić, V.; Kamnik, R. Strain Gauge Neural Network-Based Estimation as an Alternative for Force and Torque Sensor Measurements in Robot Manipulators. Appl. Sci. 2023, 13, 10217. https://doi.org/10.3390/app131810217
Kružić S, Musić J, Papić V, Kamnik R. Strain Gauge Neural Network-Based Estimation as an Alternative for Force and Torque Sensor Measurements in Robot Manipulators. Applied Sciences. 2023; 13(18):10217. https://doi.org/10.3390/app131810217
Chicago/Turabian StyleKružić, Stanko, Josip Musić, Vladan Papić, and Roman Kamnik. 2023. "Strain Gauge Neural Network-Based Estimation as an Alternative for Force and Torque Sensor Measurements in Robot Manipulators" Applied Sciences 13, no. 18: 10217. https://doi.org/10.3390/app131810217
APA StyleKružić, S., Musić, J., Papić, V., & Kamnik, R. (2023). Strain Gauge Neural Network-Based Estimation as an Alternative for Force and Torque Sensor Measurements in Robot Manipulators. Applied Sciences, 13(18), 10217. https://doi.org/10.3390/app131810217