
An Optimization Framework for Information Management in Adaptive Automotive Human–Machine Interfaces

 ,
, 
Abstract
:1. Introduction
1.1. Overview of A-HMIs in ICVs
1.2. A-HMIs as a Solution to Reduce Driver Distraction
1.2.1. Related Work
1.2.2. Research Gaps
1.3. Objectives and Scope of the Study
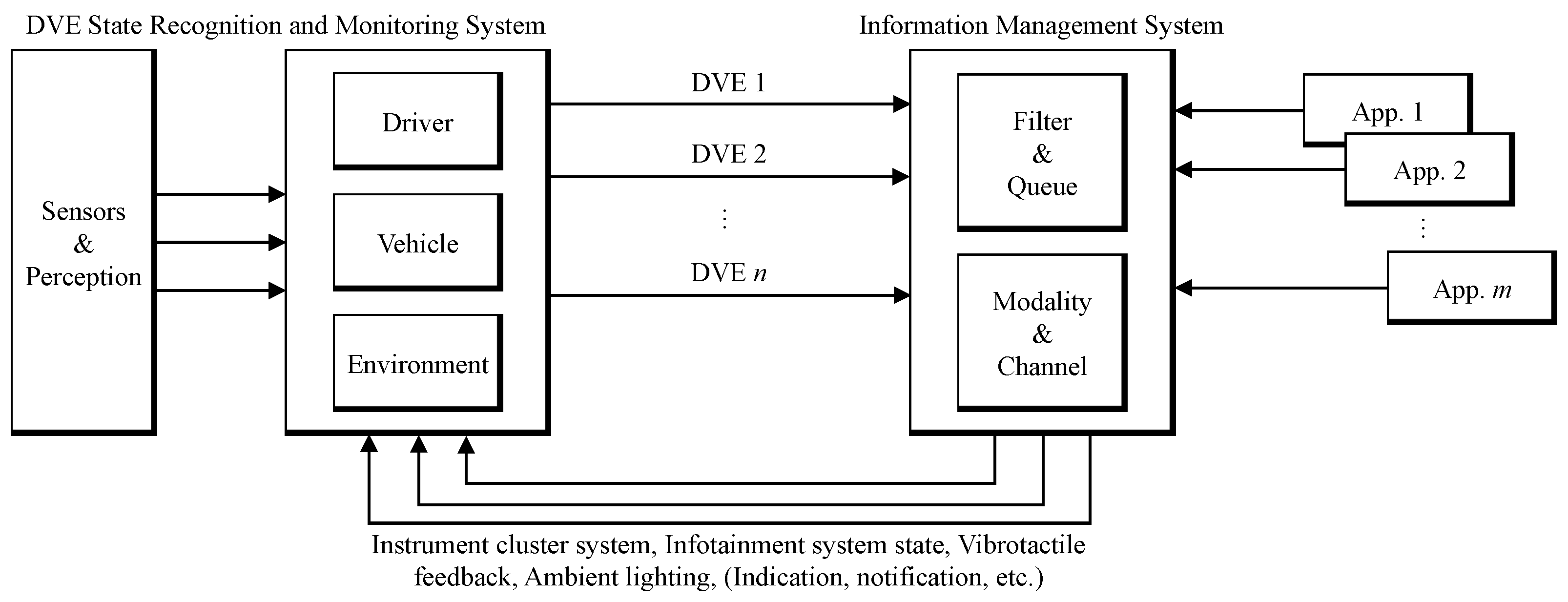
2. System Architecture
- Multi-modal HMIs, i.e., I/O devices shared by different ADAS and IVIS, such as Liquid Crystal Displays (LCD), Head-Up Displays (HUD), speech I/O, haptic I/O.
- An Information Management System (IMS), the control authority of the A-HMI, i.e., a centralized intelligence that performs information prioritization and scheduling.
- A gateway to connect nomadic devices to the in-vehicle system for sharing data, applications, and I/O devices. Thus, the functionality of the nomadic devices can be used by the in-vehicle system and vice versa.
- A system for real-time monitoring of driver and driving situation to assess information about Driver, Vehicle, and Environment (DVE status recognition and monitoring).
2.1. DVE State Recognition and Monitoring System
- DVE 1 : driver’s eyes off the road —No, driver is currently looking at the road ahead; 1—Yes, driver is currently looking at something other than the road ahead). Calculated by using driver head and eye movements and vehicle speed as input data, it gives a discrete representation of driver cognitive load or shift of visual attention away from the road ahead, induced by an external event or a secondary task.
- DVE 2 : driver impairment —Normal, alert and few driving errors; 1—Dangerous, drowsy with some driving errors, critical driving time, and long trip duration). Driver state of drowsiness is calculated based on lane positioning, driving time, and PERCLOS [57,58,59] (the percentage of eyelid closure over the pupil over time) detected by an in-cabin camera with a face-mesh technique. It describes the physical ability of the driver to drive (fatigue, sleepiness, etc.).
- DVE 3 : traffic risk —Low, no risk of collision with any other vehicle in path; 1—High, there is a risk of collision with other vehicles in path). This parameter represents the level of risk concerning the traffic density. It is driven by traffic risk established by Forward Collision Warning (FCW). Specifically, FCW warning sets the traffic risk to 1, otherwise it assumes value 0.
- DVE 4 : environment risk low visibility —Low, no risk associated with low environment visibility; 1—High, there is a risk for low environment visibility). Poor weather conditions (rain, fog, etc.) and unlit roads detected from the vehicle’s indicators and controls (e.g., wipers, rain detection sensor, fog lights, etc., and dipped headlights, high beams, etc., respectively), along with road and traffic attributes (e.g., high traffic density and high curvature of road until a certain distance ahead of the vehicle), are used to assess risk for low environment visibility [47]. At the current state of implementation, this parameter gives a discrete representation of the environmental conditions estimated only from wiper actuation state and rain detection sensor. In particular, if the wiper is active or the rain detection is true, as there is low visibility due to rain, this parameter is set to 1. Otherwise, it is set to 0.
- DVE 5 : environment risk low audibility —Low, no risk associated with low audibility of warning stimuli by the environment and vehicle safety critical systems; 1—High, there is a risk for low audibility). It describes the in-cabin noise level that is monitored by a microphone. High noise level sets the environment risk low audibility to 1, otherwise, it is set to 0.
2.2. Information Management System
- change of output modality and channel (displays, audio devices, etc.);
- change of physical layout (color, font, format, etc.);
- I/O action coordination based on prioritization, i.e., termination, interruption, retardation, resumption, or suppression of output messages.
2.2.1. Filter and Queue Module
2.2.2. Modality and Channel Module
3. Problem Statement
- using all I/O on ADAS, IVIS, and nomadic devices safely;
- keeping driver’s workload at a level that does not affect a safe driving performance;
- avoiding interference of multiple information sources;
- minimizing demanding interactions for the driver;
- decreasing the interaction complexity, according to the DVE state, via reconfiguration of the infotainment system;
- reducing response time for decision making.
- W: safety critical warnings (FCW, lane keeping, etc.).
- D: system interaction, etc.
- OP1: mandatory messages or important info related to the driving task (turn immediately notification, driver status, etc.).
- OP2: temporary info related to the driving task, requiring an action in the near future (high engine temperature, low oil pressure, etc.), or messages related to infotainment system.
- OP3: permanent status info related to the driving task, not requiring an action in the near future, or output messages related to secondary tasks (incoming phone call, chat notification, etc.).
- LQue : queue state —Low, no waiting queue for message, notifications, indications, etc.; 1—High, there is a waiting queue).
- the strategy implemented in the Filter and Queue module, described in Section 2.2.1, that is based on truth tables describing prioritization rules for applications’ requests as functions of DVE states;
- the rules implemented in the Modality and Channel module, described in Section 2.2.2, which, too, are founded on truth tables containing criteria for selecting representation modality of messages, notifications, indications, etc. suited to DVE states.
- collection of solutions to relevant driving scenarios and to different use cases;
- requirements of the A-HMI and other indications coming from the technical literature state-of-the-art;
- the perceived effects assessing proposals of HMI adaptation, made by a pool of experts.
4. Design of an Optimization Framework for the IMS
4.1. Driver Workload Index
4.2. Actions Queue Index
- safety relevance = high;
- mobility relevance = medium;
- workload impact = medium.
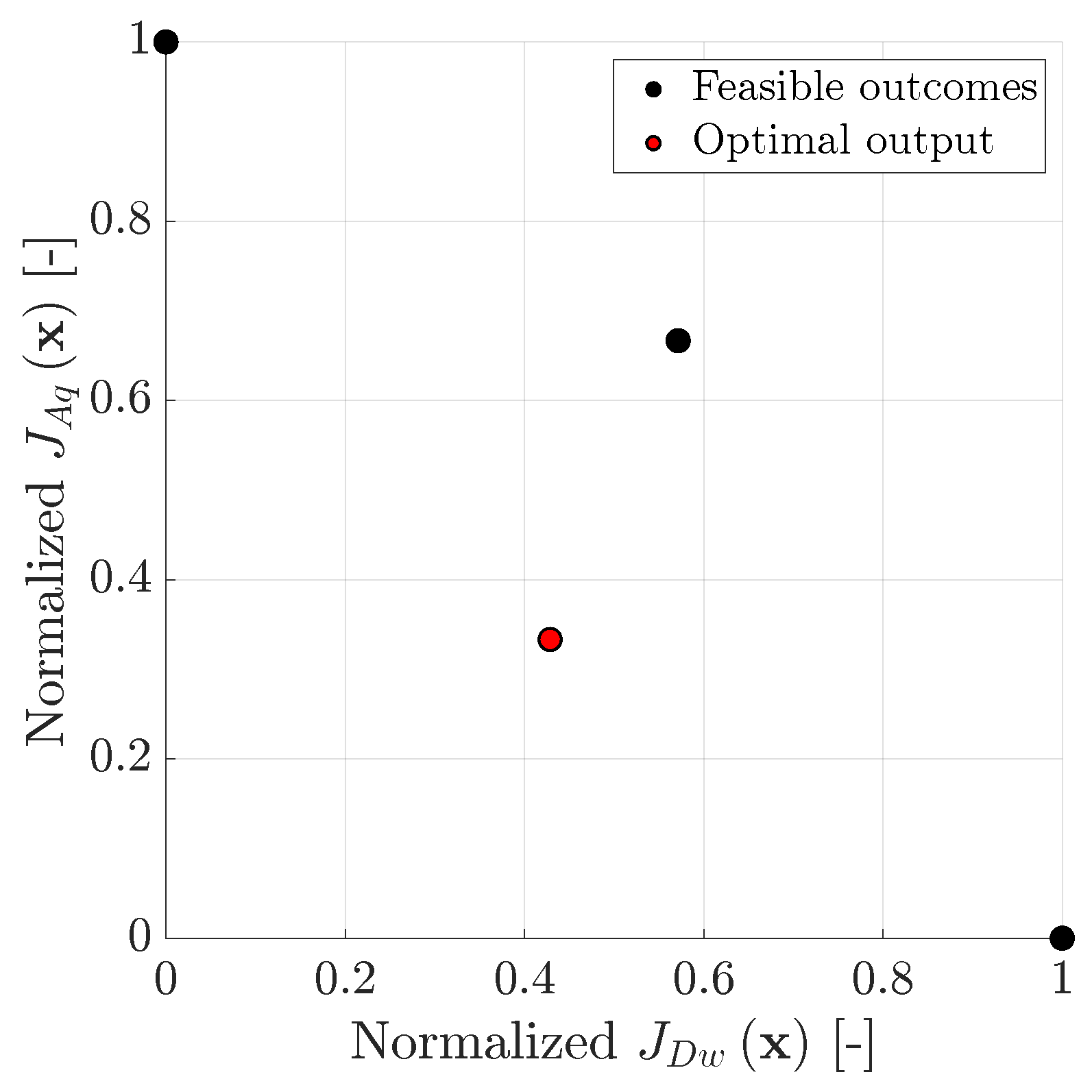
4.3. Multi-Variable Multi-Objective Optimization
- parameters that describe the driving scenario, i.e., DVE 1, …, DVE n, LQue, App. 1, …, App. m;
- m decision variables , each of them associated with one of the m application requests App. i, and determines if the corresponding action is executed or not .
5. Results and Analysis
5.1. Implementation of the Optimization Framework
Implementation of the Optimized Filtering Strategy
5.2. Results
- Scenario 1: the Filter and Queue module must schedule the driver request to increase the volume of the infotainment system and an incoming phone call. The decision management process is carried out, taking into account the output from the DVE state recognition and monitoring system, which infers a high driver workload level. The input vector of this driving scenario is reported in Table 4.
- Scenario 2: wipers actuation state, measurements of rain detection sensors, and microphone warn of a high level of environmental risk for both low visibility and audibility. According to these conditions, the truth table must filter two application requests, i.e., activate turn indicators and an incoming phone call. Table 5 shows the corresponding input vector.
- Scenario 3: the monitoring system detects high risk in four of the five dimensions of the driver–vehicle–environment system, i.e., driver distraction, driver drowsiness, environment low visibility, and environment low audibility. The IMS addresses a complex decision management problem, where, in the high waiting queue condition, three requests are performed, i.e., system interaction, activate turn indicators, and increase the volume of the infotainment system. This driving scenario corresponds to the input vector in Table 6.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input (DVE Parameters) | Value | Input (Queue State, App. Requests) | Value |
|---|---|---|---|
| DVE 1 | 1 [-] | LQue | 0 [-] |
| DVE 2 | 0 [-] | App. 2 (system interaction) | 0 [-] |
| DVE 3, App. 1 (FCW) | 0 [-] | App. 3 (turn indicators) | 0 [-] |
| DVE 4 | 0 [-] | App. 4 (volume increase) | 1 [-] |
| DVE 5 | 0 [-] | App. 5 (phone call) | 1 [-] |
| Input (DVE Parameters) | Value | Input (Queue State, App. Requests) | Value |
|---|---|---|---|
| DVE 1 | 0 [-] | LQue | 0 [-] |
| DVE 2 | 0 [-] | App. 2 (system interaction) | 0 [-] |
| DVE 3, App. 1 (FCW) | 0 [-] | App. 3 (turn indicators) | 1 [-] |
| DVE 4 | 1 [-] | App. 4 (volume increase) | 0 [-] |
| DVE 5 | 1 [-] | App. 5 (phone call) | 1 [-] |
| Input (DVE Parameters) | Value | Input (Queue State, App. Requests) | Value |
|---|---|---|---|
| DVE 1 | 1 [-] | LQue | 1 [-] |
| DVE 2 | 1 [-] | App. 2 (system interaction) | 1 [-] |
| DVE 3, App. 1 (FCW) | 0 [-] | App. 3 (turn indicators) | 1 [-] |
| DVE 4 | 1 [-] | App. 4 (volume increase) | 1 [-] |
| DVE 5 | 1 [-] | App. 5 (phone call) | 0 [-] |
5.3. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Haydari, A.; Yılmaz, Y. Deep reinforcement learning for intelligent transportation systems: A survey. IEEE Trans. Intell. Transp. Syst. 2020, 23, 11–32. [Google Scholar] [CrossRef]
- Coppola, A.; Lui, D.G.; Petrillo, A.; Santini, S. Cooperative driving of heterogeneous uncertain nonlinear connected and autonomous vehicles via distributed switching robust PID-like control. Inf. Sci. 2023, 625, 277–298. [Google Scholar] [CrossRef]
- Arthurs, P.; Gillam, L.; Krause, P.; Wang, N.; Halder, K.; Mouzakitis, A. A taxonomy and survey of edge cloud computing for intelligent transportation systems and connected vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6206–6221. [Google Scholar] [CrossRef]
- Petrillo, A.; Prati, M.V.; Santini, S.; Tufano, F. Improving the NOx reduction performance of an Euro VI d SCR System in real-world condition via nonlinear model predictive control. Int. J. Engine Res. 2023, 24, 823–842. [Google Scholar] [CrossRef]
- Baratta, M.; Kheshtinejad, H.; Laurenzano, D.; Misul, D.; Brunetti, S. Modelling aspects of a CNG injection system to predict its behavior under steady state conditions and throughout driving cycle simulations. J. Nat. Gas Sci. Eng. 2015, 24, 52–63. [Google Scholar] [CrossRef]
- Coppola, A.; Lui, D.G.; Petrillo, A.; Santini, S. Eco-driving control architecture for platoons of uncertain heterogeneous nonlinear connected autonomous electric vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24220–24234. [Google Scholar] [CrossRef]
- Albarella, N.; Lui, D.G.; Petrillo, A.; Santini, S. A Hybrid Deep Reinforcement Learning and Optimal Control Architecture for Autonomous Highway Driving. Energies 2023, 16, 3490. [Google Scholar] [CrossRef]
- Bifulco, G.N.; Coppola, A.; Petrillo, A.; Santini, S. Decentralized cooperative crossing at unsignalized intersections via vehicle-to-vehicle communication in mixed traffic flows. J. Intell. Transp. Syst. 2022, 1–26. [Google Scholar] [CrossRef]
- Caiazzo, B.; Coppola, A.; Petrillo, A.; Santini, S. Distributed nonlinear model predictive control for connected autonomous electric vehicles platoon with distance-dependent air drag formulation. Energies 2021, 14, 5122. [Google Scholar] [CrossRef]
- Musa, A.; Pipicelli, M.; Spano, M.; Tufano, F.; De Nola, F.; Di Blasio, G.; Gimelli, A.; Misul, D.A.; Toscano, G. A review of model predictive controls applied to advanced driver-assistance systems. Energies 2021, 14, 7974. [Google Scholar] [CrossRef]
- Bengler, K.; Rettenmaier, M.; Fritz, N.; Feierle, A. From HMI to HMIs: Towards an HMI framework for automated driving. Information 2020, 11, 61. [Google Scholar] [CrossRef]
- Kun, A.L. Human-machine interaction for vehicles: Review and outlook. Found. Trends Hum. Comput. Interact. 2018, 11, 201–293. [Google Scholar] [CrossRef]
- Piechulla, W.; Mayser, C.; Gehrke, H.; König, W. Reducing drivers’ mental workload by means of an adaptive man–machine interface. Transp. Res. Part Traffic Psychol. Behav. 2003, 6, 233–248. [Google Scholar] [CrossRef]
- Hasenjäger, M.; Heckmann, M.; Wersing, H. A survey of personalization for advanced driver assistance systems. IEEE Trans. Intell. Veh. 2019, 5, 335–344. [Google Scholar] [CrossRef]
- Feigh, K.M.; Dorneich, M.C.; Hayes, C.C. Toward a characterization of adaptive systems: A framework for researchers and system designers. Hum. Factors 2012, 54, 1008–1024. [Google Scholar] [CrossRef]
- Tan, Z.; Dai, N.; Su, Y.; Zhang, R.; Li, Y.; Wu, D.; Li, S. Human–machine interaction in intelligent and connected vehicles: A review of status quo, issues, and opportunities. IEEE Trans. Intell. Transp. Syst. 2021, 23, 13954–13975. [Google Scholar] [CrossRef]
- Nakagawa, T.; Nishimura, R.; Iribe, Y.; Ishiguro, Y.; Ohsuga, S.; Kitaoka, N. A human machine interface framework for autonomous vehicle control. In Proceedings of the 2017 IEEE 6th Global Conference on Consumer Electronics (GCCE), Nagoya, Japan, 24–27 October 2017; pp. 1–3. [Google Scholar]
- Árnason, J.I.; Jepsen, J.; Koudal, A.; Schmidt, M.R.; Serafin, S. Volvo intelligent news: A context aware multi modal proactive recommender system for in-vehicle use. Pervasive Mob. Comput. 2014, 14, 95–111. [Google Scholar] [CrossRef]
- Wiegand, G.; Mai, C.; Holländer, K.; Hussmann, H. Incarar: A design space towards 3D augmented reality applications in vehicles. In Proceedings of the 11th international conference on automotive user interfaces and interactive vehicular applications, Utrecht, The Netherlands, 22–25 September 2019; pp. 1–13. [Google Scholar]
- Gray, R.; Ho, C.; Spence, C. A comparison of different informative vibrotactile forward collision warnings: Does the warning need to be linked to the collision event? PLoS ONE 2014, 9, e87070. [Google Scholar] [CrossRef]
- Brancati, R.; Tufano, F. Indirect Estimation of Tire Pressure on Several Road Pavements via Interacting Multiple Model Approach. Machines 2022, 10, 1221. [Google Scholar] [CrossRef]
- Rittger, L.; Engelhardt, D.; Schwartz, R. Adaptive user experience in the car—Levels of adaptivity and adaptive HMI design. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4866–4876. [Google Scholar] [CrossRef]
- Wandtner, B.; Schömig, N.; Schmidt, G. Secondary task engagement and disengagement in the context of highly automated driving. Transp. Res. Part Traffic Psychol. Behav. 2018, 58, 253–263. [Google Scholar] [CrossRef]
- Verwey, W.B. On-line driver workload estimation. Effects of road situation and age on secondary task measures. Ergonomics 2000, 43, 187–209. [Google Scholar] [CrossRef] [PubMed]
- Bischoff, D. Developing Guidelines for Managing Driver Workload and Distraction Associated with Telematic Devices SAE Paper. 2007. Available online: https://www-esv.nhtsa.dot.gov/Proceedings/20/print6.pdf (accessed on 21 September 2023).
- DeGuzman, C.A.; Kanaan, D.; Donmez, B. Attentive user interfaces: Adaptive interfaces that monitor and manage driver attention. In User Experience Design in the Era of Automated Driving; Springer: Berlin/Heidelberg, Germany, 2022; pp. 305–334. [Google Scholar]
- Galarza, M.; Paradells, J. Improving road safety and user experience by employing dynamic in-vehicle information systems. IET Intell. Transp. Syst. 2019, 13, 738–744. [Google Scholar] [CrossRef]
- Birrell, S.; Young, M.; Stanton, N.; Jennings, P. Using adaptive interfaces to encourage smart driving and their effect on driver workload. In Advances in Human Aspects of Transportation: Proceedings of the AHFE 2016 International Conference on Human Factors in Transportation, Walt Disney World®, Orlando, FL, USA, 27–31 July 2016; Springer: Berlin/Heidelberg, Germany, 2017; pp. 31–43. [Google Scholar]
- Wintersberger, P.; Schartmüller, C.; Riener, A. Attentive user interfaces to improve multitasking and take-over performance in automated driving: The auto-net of things. Int. J. Mob. Hum. Comput. Interact. (IJMHCI) 2019, 11, 40–58. [Google Scholar] [CrossRef]
- Oron-Gilad, T.; Ronen, A.; Shinar, D. Alertness maintaining tasks (AMTs) while driving. Accid. Anal. Prev. 2008, 40, 851–860. [Google Scholar] [CrossRef]
- Jamson, A.H.; Lai, F.C.; Carsten, O.M. Potential benefits of an adaptive forward collision warning system. Transp. Res. Part Emerg. Technol. 2008, 16, 471–484. [Google Scholar] [CrossRef]
- Gaspar, J.; Schwarz, C.; Kashef, O.; Schmitt, R.; Shull, E. Using Driver State Detection in Automated Vehicles. 2018. Available online: https://rosap.ntl.bts.gov/view/dot/42273 (accessed on 21 September 2023).
- Reinmueller, K.; Koehler, L.; Steinhauser, M. Adaptive warning signals adjusted to driver passenger conversation: Impact of system awareness on behavioral adaptations. Transp. Res. Part Traffic Psychol. Behav. 2018, 58, 242–252. [Google Scholar] [CrossRef]
- Heigemeyr, A.; Harrer, A. An integrated method for Adaptive automotive Human Machine Interfaces. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), Hague, The Netherlands, 6–9 October 2013; pp. 558–564. [Google Scholar]
- Endres, C. PRESTK: Situation-Aware Presentation of Messages and Infotainment Content for Drivers. 2012. Available online: http://dx.doi.org/10.22028/D291-25216 (accessed on 21 September 2023).
- Heigemeyr, A.; Harrer, A. Information management for adaptive automotive human machine interfaces. In Proceedings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; pp. 1–8. [Google Scholar]
- Amditis, A.; Andreone, L.; Pagle, K.; Markkula, G.; Deregibus, E.; Rue, M.R.; Bellotti, F.; Engelsberg, A.; Brouwer, R.; Peters, B.; et al. Towards the automotive HMI of the future: Overview of the AIDE-integrated project results. IEEE Trans. Intell. Transp. Syst. 2010, 11, 567–578. [Google Scholar] [CrossRef]
- Peter, C.; Beale, R. Affect and Emotion in Human-Computer Interaction: From Theory to Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008; Volume 4868. [Google Scholar]
- Khan, I.; Khusro, S. Towards the design of context-aware adaptive user interfaces to minimize drivers’ distractions. Mob. Inf. Syst. 2020, 2020, 8858886. [Google Scholar] [CrossRef]
- Manawadu, U.E.; Kamezaki, M.; Ishikawa, M.; Kawano, T.; Sugano, S. A multimodal human-machine interface enabling situation-Adaptive control inputs for highly automated vehicles. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1195–1200. [Google Scholar]
- Amditis, A.; Polychronopoulos, A.; Andreone, L.; Bekiaris, E. Communication and interaction strategies in automotive adaptive interfaces. Cogn. Technol. Work. 2006, 8, 193–199. [Google Scholar] [CrossRef]
- Prentzas, J.; Hatzilygeroudis, I. Categorizing approaches combining rule-based and case-based reasoning. Expert Syst. 2007, 24, 97–122. [Google Scholar] [CrossRef]
- Deregibus, E.; Andreone, L.; Bianco, E.; Amditis, A.; Polychronopoulos, A.; Kussman, H. The AIDE Adaptive and Integrated HMI Design: The Concept of the Interaction Communication Assistant; ITS: London, UK, 2006. [Google Scholar]
- Maino, C.; Misul, D.; Musa, A.; Spessa, E. Optimal mesh discretization of the dynamic programming for hybrid electric vehicles. Appl. Energy 2021, 292, 116920. [Google Scholar] [CrossRef]
- Miretti, F.; Misul, D.; Spessa, E. DynaProg: Deterministic Dynamic Programming solver for finite horizon multi-stage decision problems. SoftwareX 2021, 14, 100690. [Google Scholar] [CrossRef]
- De Santis, D. A framework for optimizing co-adaptation in body-machine interfaces. Front. Neurorobotics 2021, 15, 662181. [Google Scholar] [CrossRef]
- Amditis, A.; Kubmann, H.; Polychronopoulos, A.; Engstrom, J.; Andreone, L. System architecture for integrated adaptive HMI solutions. In Proceedings of the 2006 IEEE Intelligent Vehicles Symposium, Meguro-Ku, Japan, 13–15 June 2006; pp. 388–393. [Google Scholar]
- López-González, M. Today is to see and know: An argument and proposal for integrating human cognitive intelligence into autonomous vehicle perception. Electron. Imaging 2019, 31, art00020. [Google Scholar] [CrossRef]
- Liang, Y.; Reyes, M.L.; Lee, J.D. Real-time detection of driver cognitive distraction using support vector machines. IEEE Trans. Intell. Transp. Syst. 2007, 8, 340–350. [Google Scholar] [CrossRef]
- Muñoz, M.; Reimer, B.; Lee, J.; Mehler, B.; Fridman, L. Distinguishing patterns in drivers’ visual attention allocation using Hidden Markov Models. Transp. Res. Part Traffic Psychol. Behav. 2016, 43, 90–103. [Google Scholar] [CrossRef]
- Wang, X.; Liu, Y.; Wang, F.; Wang, J.; Liu, L.; Wang, J. Feature extraction and dynamic identification of drivers’ emotions. Transp. Res. Part Traffic Psychol. Behav. 2019, 62, 175–191. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Zhang, Z.; Wang, H.; Na, X.; Cao, D.; Velenis, E.; Wang, F.Y. Identification and analysis of driver postures for in-vehicle driving activities and secondary tasks recognition. IEEE Trans. Comput. Soc. Syst. 2017, 5, 95–108. [Google Scholar] [CrossRef]
- Sommer, D.; Golz, M. Evaluation of PERCLOS based current fatigue monitoring technologies. In Proceedings of the 2010 Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 4456–4459. [Google Scholar]
- Li, K.; Gong, Y.; Ren, Z. A fatigue driving detection algorithm based on facial multi-feature fusion. IEEE Access 2020, 8, 101244–101259. [Google Scholar] [CrossRef]
- Polychronopoulos, A.; Amditis, A.; Andreone, L. Stochastic reconstruction of the traffic scenario and applications for situation adaptive interfaces. In Proceedings of the 12th World Congress on Intelligent Transport SystemsITS AmericaITS JapanERTICO, San Francisco, CA, USA, 6–10 November 2005. [Google Scholar]
- Polychronopoulos, A.; Amditis, A.; Andreone, L. Real time environmental and traffic supervision for adaptive interfaces in intelligent vehicles. IFAC Proc. Vol. 2005, 38, 115–120. [Google Scholar] [CrossRef]
- Wierwille, W.W.; Wreggit, S.; Kirn, C.; Ellsworth, L.; Fairbanks, R. Research on Vehicle-Based Driver Status/Performance Monitoring; Development, Validation, and Refinement of Algorithms for Detection of Driver Drowsiness. Final Report; Technical Report. 1994. Available online: https://rosap.ntl.bts.gov/view/dot/2578 (accessed on 21 September 2023).
- Dinges, D.F.; Grace, R. PERCLOS: A Valid Psychophysiological Measure of Alertness as Assessed by Psychomotor Vigilance; Publication Number FHWA-MCRT-98-006; US Department of Transportation, Federal Highway Administration: Washington, DC, USA, 1998.
- Trutschel, U.; Sirois, B.; Sommer, D.; Golz, M.; Edwards, D. PERCLOS: An alertness measure of the past. In Proceedings of the Driving Assesment Conference, Santa Fe, NM, USA, 24–27 June 2011; University of Iowa: Iowa, IA, USA, 2011; Volume 6. [Google Scholar]
- Amditis, A.; Andreone, L.; Polychronopoulos, A.; Engström, J. Design and development of an adaptive integrated driver-vehicle interface: Overview of the AIDE project. IFAC Proc. Vol. 2005, 38, 103–108. [Google Scholar] [CrossRef]
- Lohani, M.; Payne, B.R.; Strayer, D.L. A review of psychophysiological measures to assess cognitive states in real-world driving. Front. Hum. Neurosci. 2019, 13, 57. [Google Scholar] [CrossRef]
- Paxion, J.; Galy, E.; Berthelon, C. Mental workload and driving. Front. Psychol. 2014, 5, 1344. [Google Scholar] [CrossRef] [PubMed]
- Annett, J. Subjective rating scales: Science or art? Ergonomics 2002, 45, 966–987. [Google Scholar] [CrossRef]
- Tomporowski, P.D. Performance and perceptions of workload among young and older adults: Effects of practice during cognitively demanding tasks. Educ. Gerontol. 2003, 29, 447–466. [Google Scholar] [CrossRef]
- Johnson, A.; Proctor, R.W. Attention: Theory and Practice; Sage: Newcastle-upon-Tyne, UK, 2004. [Google Scholar]
- Tokunaga, R.A.; Hagiwara, T.; Kagaya, S.; Onodera, Y. Cellular telephone conversation while driving: Effects on driver reaction time and subjective mental workload. Transp. Res. Rec. 2000, 1724, 1–6. [Google Scholar] [CrossRef]
- Patten, C.J.; Kircher, A.; Östlund, J.; Nilsson, L. Using mobile telephones: Cognitive workload and attention resource allocation. Accid. Anal. Prev. 2004, 36, 341–350. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1988; Volume 52, pp. 139–183. [Google Scholar]
- Pauzié, A. A method to assess the driver mental workload: The driving activity load index (DALI). IET Intell. Transp. Syst. 2008, 2, 315–322. [Google Scholar] [CrossRef]
- Gimelli, A.; Sannino, R. A micro gas turbine one-dimensional model: Approach description, calibration with a vector optimization methodology and validation. Appl. Therm. Eng. 2021, 188, 116644. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Muccillo, M.; Gimelli, A.; Sannino, R. Multi-objective optimization and sensitivity analysis of a cogeneration system for a hospital facility. Energy Procedia 2015, 81, 585–596. [Google Scholar] [CrossRef]
- Gimelli, A.; Mottola, F.; Muccillo, M.; Proto, D.; Amoresano, A.; Andreotti, A.; Langella, G. Optimal configuration of modular cogeneration plants integrated by a battery energy storage system providing peak shaving service. Appl. Energy 2019, 242, 974–993. [Google Scholar] [CrossRef]
- Deb, K.; Sindhya, K.; Okabe, T. Self-adaptive simulated binary crossover for real-parameter optimization. In Proceedings of the 9th Annual Conference on Genetic and Evolutionary Computation, London, UK, 7–1 July 2007; pp. 1187–1194. [Google Scholar]
- Kineton. Innovarion Lab, KineCar. 2023. Available online: https://www.kineton.it/innovation-lab/ (accessed on 5 September 2023).
- Kutila, M.; Jokela, M.; Markkula, G.; Rué, M.R. Driver distraction detection with a camera vision system. In Proceedings of the 2007 IEEE International Conference on Image Processing, San Antonio, TX, USA, 16–19 September 2007; Volume 6, pp. VI-201–VI-204. [Google Scholar]
- Helene, T.V.; Thierry, B.; Serge, B.; Matti, K.; Jouko, V.; Evangelos, B.; Maria, P.; Johan, E.; Anders, A. Development of a driver situation assessment module in the AIDE project. IFAC Proc. Vol. 2005, 38, 97–102. [Google Scholar] [CrossRef]
- Wu, C.; Liu, Y. Queuing network modeling of driver workload and performance. IEEE Trans. Intell. Transp. Syst. 2007, 8, 528–537. [Google Scholar]
- Fonsalas, F. Holistic HMI Architecture for Adaptive and Predictive Car Interiors. In Electronic Components and Systems for Automotive Applications, Proceedings of the 5th CESA Automotive Electronics Congress, Paris, France, 5–6 December 2018; Springer: Berlin/Heidelberg, Germany, 2019; pp. 217–227. [Google Scholar]
- Hu, Z.; Lv, C.; Hang, P.; Huang, C.; Xing, Y. Data-driven estimation of driver attention using calibration-free eye gaze and scene features. IEEE Trans. Ind. Electron. 2021, 69, 1800–1808. [Google Scholar] [CrossRef]






| DVE, Queue, Application Requests | DVE 1 | |
| … | ||
| DVE n | ||
| LQue | ||
| Outcome of Requests | App. 1 | |
| … | ||
| App. m | ||
| App. 1 | DVE 1, …, DVE n, LQue, App. 1, …, App. m | |
| … | … | |
| App. m | DVE 1, …, DVE n, LQue, App. 1, …, App. m | |
| DVE and Application Request | DVE 1 | |
| DVE 2 | ||
| DVE 3 | ||
| DVE 4 | ||
| DVE 5 | ||
| LQue | ||
| Outcome of Request | App. 1 = FCW | |
| App. 2 = system interaction | ||
| App. 3 = turn indicators | ||
| App. 4 = volume increase | ||
| App. 5 = phone call | ||
| FCW | DVE 1, …, DVE 5, LQue, App. 1, …, App. 5 | |
| system interaction | DVE 1, …, DVE 5, LQue, App. 1, …, App. 5 | |
| turn indicators | DVE 1, …, DVE 5, LQue, App. 1, …, App. 5 | |
| volume increase | DVE 1, …, DVE 5, LQue, App. 1, …, App. 5 | |
| phone call | DVE 1, …, DVE 5, LQue, App. 1, …, App. 5 | |
| Coefficient | Value | Coefficient | Value |
|---|---|---|---|
| 10 [-] | 5 [-] | ||
| 20 [-] | 4 [-] | ||
| 10 [-] | 3 [-] | ||
| 2 [-] | 2 [-] | ||
| 2 [-] | 4 [-] | ||
| 1.5 [-] | 4 [-] | ||
| 1 [-] | 3 [-] | ||
| 2 [-] | 2 [-] |
| Output (Action) | Value | Output (Action) | Value |
|---|---|---|---|
| system interaction | 0 [-] | volume increase | 1 [-] |
| turn indicators | 0 [-] | phone call | 0 [-] |
| Output (Action) | Value | Output (Action) | Value |
|---|---|---|---|
| system interaction | 0 [-] | volume increase | 0 [-] |
| turn indicators | 1 [-] | phone call | 0 [-] |
| Output (Action) | Value | Output (Action) | Value |
|---|---|---|---|
| system interaction | 0 [-] | volume increase | 1 [-] |
| turn indicators | 1 [-] | phone call | 0 [-] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tufano, F.; Bahadure, S.W.; Tufo, M.; Novella, L.; Fiengo, G.; Santini, S. An Optimization Framework for Information Management in Adaptive Automotive Human–Machine Interfaces. Appl. Sci. 2023, 13, 10687. https://doi.org/10.3390/app131910687
Tufano F, Bahadure SW, Tufo M, Novella L, Fiengo G, Santini S. An Optimization Framework for Information Management in Adaptive Automotive Human–Machine Interfaces. Applied Sciences. 2023; 13(19):10687. https://doi.org/10.3390/app131910687
Chicago/Turabian StyleTufano, Francesco, Sushant Waman Bahadure, Manuela Tufo, Luigi Novella, Giovanni Fiengo, and Stefania Santini. 2023. "An Optimization Framework for Information Management in Adaptive Automotive Human–Machine Interfaces" Applied Sciences 13, no. 19: 10687. https://doi.org/10.3390/app131910687
APA StyleTufano, F., Bahadure, S. W., Tufo, M., Novella, L., Fiengo, G., & Santini, S. (2023). An Optimization Framework for Information Management in Adaptive Automotive Human–Machine Interfaces. Applied Sciences, 13(19), 10687. https://doi.org/10.3390/app131910687