1. Introduction
Input shaping technology is used to reduce residual oscillations in various flexible systems, including industrial cranes [
1,
2] and flexible robot joint systems [
3]. Input shapers enhance robustness with added impulses to ensure good control performance. However, conventional input shapers have achieved zero-residual-deflection control performance with accurate system modeling and ideal actuators, whereas acceleration-limit actuators are commonly employed owing to their cost-effective industrial applications. Therefore, new robust input shapers must be developed for practical industrial applications of input shaping techniques to flexible systems for maintaining control robustness under acceleration-limit actuators.
Input shaping is implemented via the convolving of an input command with an impulse sequence comprising magnitudes and time locations determined by solving a set of constraint equations to generate a shaped input [
4,
5,
6]. The constraint on the percentage residual oscillation amplitude (PRA) can be expressed as the ratio of the residual oscillation amplitudes with and without shaping. For an undamped model of a second-order linear system,
is expressed as:
where
,
, and
represent the natural frequency of the system, and the magnitude and time location of the
th impulse, respectively. By setting
regarding the actuator performance limit and the shortest duration, a zero vibration (ZV) shaper [
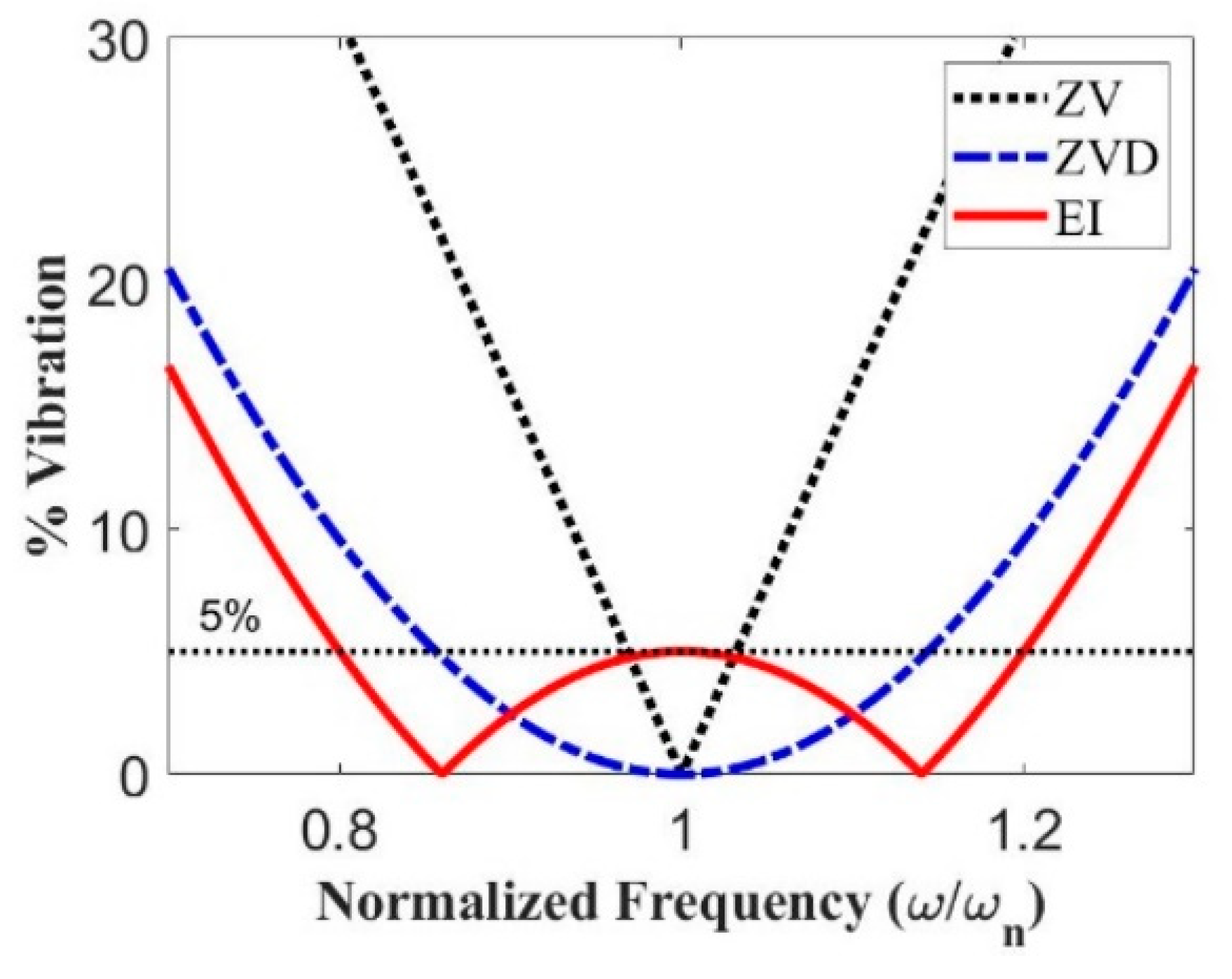
7] was obtained with the least amount of robustness because the residual oscillation increases rapidly as the modeling parameter is deviated. To improve the robustness of input shapers against system modeling errors, a ZV and derivative (ZVD) shaper [
8] was developed using the derivative with respect to the frequency of
= 0 as an additional constraint. To further improve the robustness by allowing a tolerable level of residual oscillation, an extra-insensitive (EI) shaper [
9] was proposed. For the qualitative measurement of the robustness of input shapers, a sensitivity curve is displayed in
Figure 1, indicating the change in residual oscillation as a function of the modeling error. Insensitivity is a measurement of the relative robustness of shapers and is defined as the width of the sensitivity curve at a tolerable percentage oscillation level
with respect to the parameter of interest. Even if the EI and ZVD shapers produce longer insensitivity than the ZV shaper at
, these input shapers are developed under the assumption of linear system theory which means that their robustness performance is questionable for nonlinear dynamics.
Considering the nonlinear dynamics of actuators, several input shapers have been proposed for ramp [
10,
11], first-order [
12,
13], and asymmetric 2nd-order [
14] actuators. However, nonlinear dynamics can be attributed to discontinuous nonlinearities within a system, such as backlash, saturation, rate-limiting, and dead-zone. When a hard nonlinearity distorts an input-shaped command, the oscillation reduction performance of the input shapers can be significantly degraded [
15,
16]. The effects of backlash [
17] and Coulomb friction [
18] on an input-shaping control system were considered and techniques for the input shaper redesign to reduce the detrimental effects of nonlinearities were presented. However, all previous studies have focused on developing input shaping techniques against the nonlinearities of actuators rather than improving control robustness while addressing nonlinear dynamics.
As an alternative approach to improve the control robustness of input shapers, nonlinear optimization is required with the typical constraints of transient oscillation [
19], robustness [
20], and time optimality [
21,
22]. Although these approaches are powerful, they require high computational power and reliable algorithms; therefore, they are impractical in real-time applications. In addition, more impulse sequences for these input shapers should be employed to maintain robust control performance against system modeling errors. Because the input-shaping technology is a time-delayed filter, it is desirable to include as short a sequence as possible while maximizing the robustness performance for practical and cost-effective industrial implementations under non-ideal effects.
The primary contribution of this study is the development of two analytically robust input shapers with only three impulse sequences under acceleration-limit actuators using a vector diagram approach [
15,
23]. First, a pendulum system is utilized for the phasor-vector formulation to express the steady-state response. A ramp-step function is employed to approximate the response of the acceleration-limit actuator. Second, two types of robust input shapers are strategically developed with the utilization of the analytical impulse magnitudes of classical robust input shapers. Third, the proposed robust input shapers are numerically evaluated with respect to the duration, actuator parameters, and flexible system parameters. Finally, the sensitivity and residual deflections of the proposed robust input shapers are experimentally validated using a mini bridge crane.
2. Robust Input Shapers for Acceleration-Limit Actuators
In this section, two types of robust input shapers were analytically developed with only three impulse sequences for the oscillation reduction of flexible system operations with acceleration-limit actuators during point-to-point maneuvers. In the derivation process, the impulse magnitudes of the linear robust input shapers that satisfied the actuator performance limit were utilized to determine the impulse time locations. Two types of robust input shapers are presented besides a phasor vector representation of a ramp function to approximate the distorted input command profile, as described below.
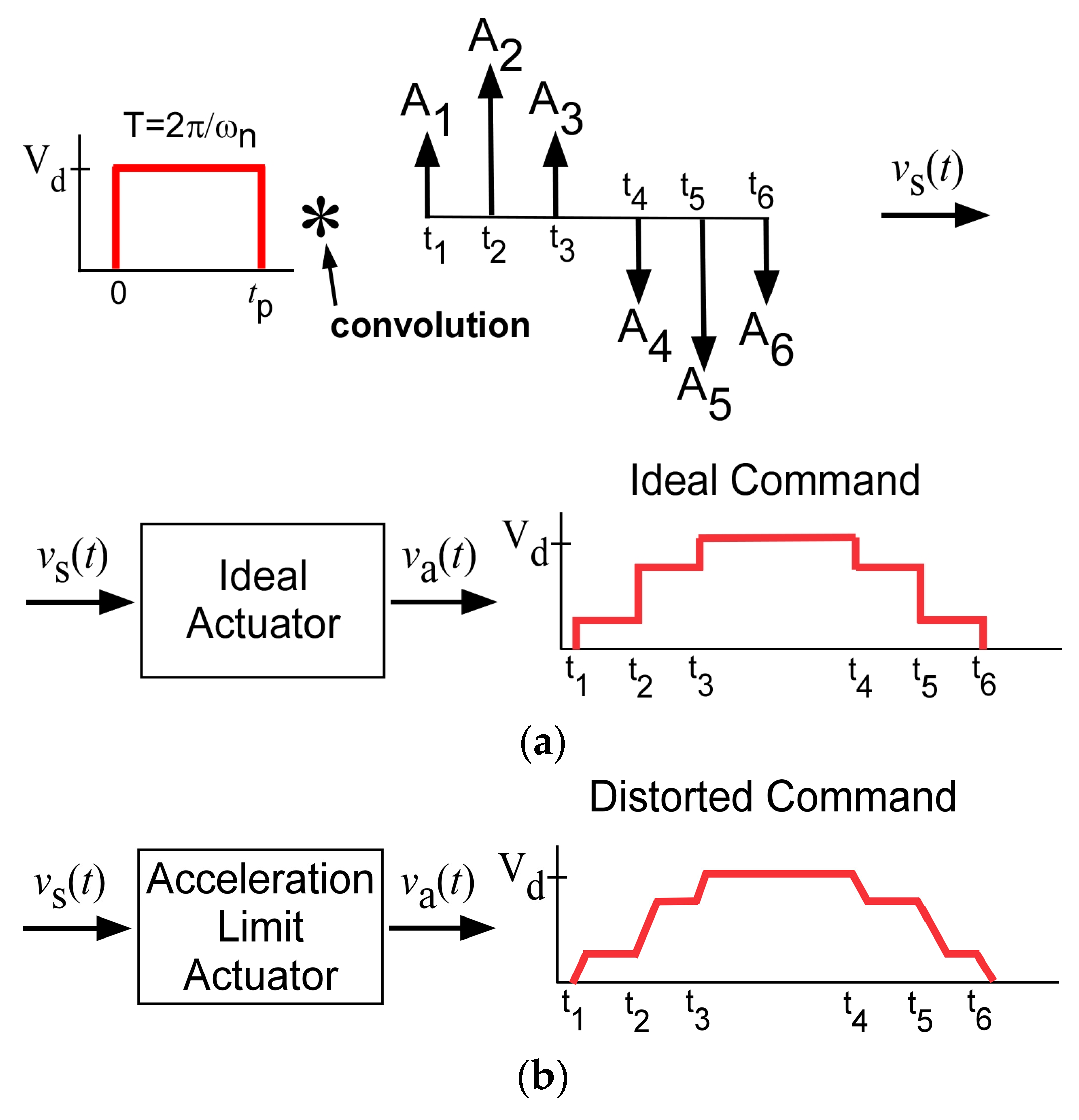
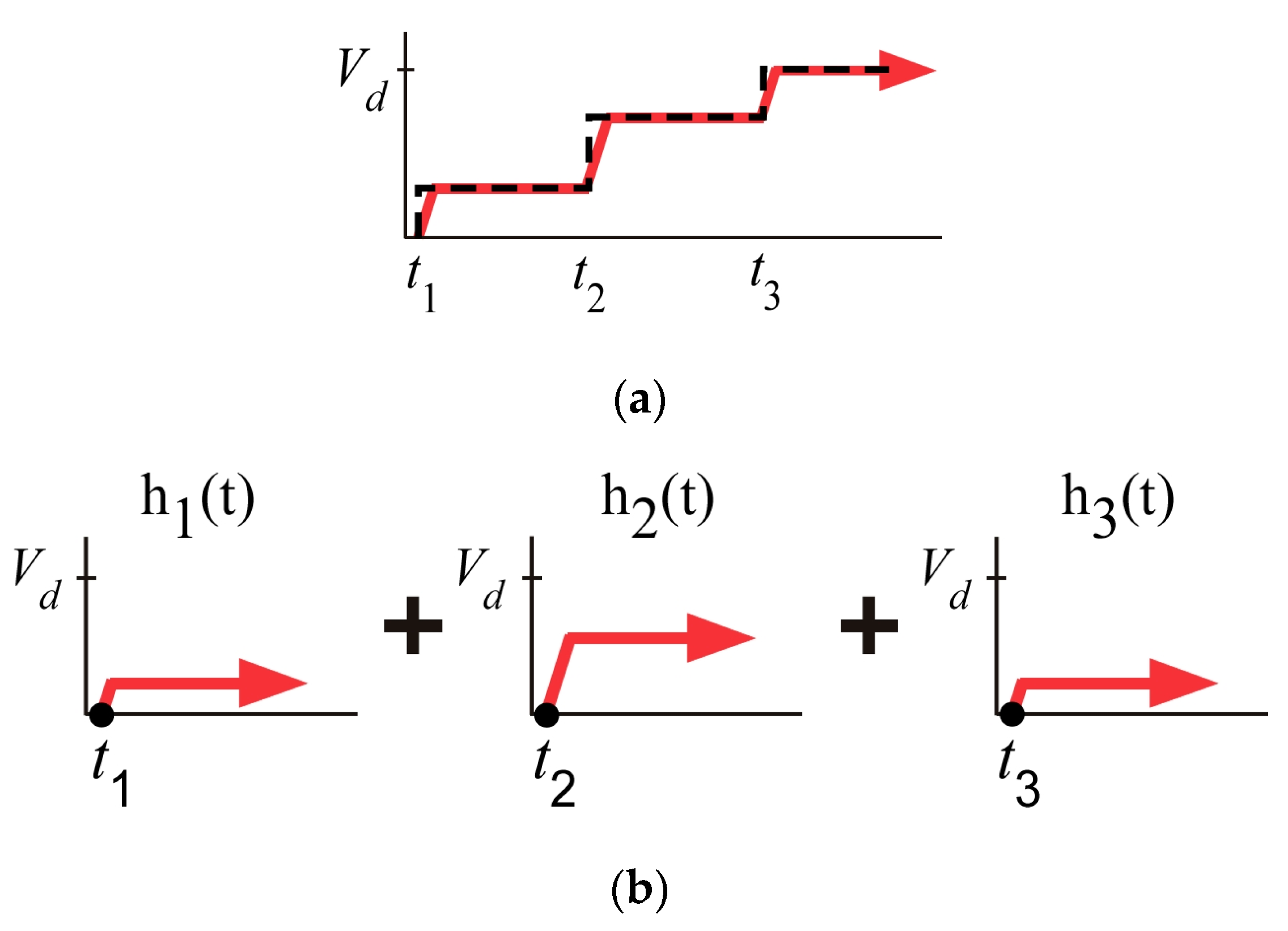
In the case of ideal actuators with infinite acceleration and braking performances, ideal-shaped input commands were generated by convolving the pulse input and three impulse sequences, where
and
are the amplitude and time location of the impulse, respectively, as shown in
Figure 2a. An acceleration-limit actuator that generates ramp-shaped input commands changes its own input commands, as shown in
Figure 2b. These distorted input commands degrade the control performance of flexible systems and produce large residual oscillations.
In
Figure 2,
represents the desired velocity of the actuator and
represents the velocity shaped by the input shaper. To develop an input shaper for such a nonlinear input command profile, the input command is transformed and simplified into a ramp shape, as depicted in
Figure 3. This approach, with an equivalent constraint, provides a solution process that can be reformulated to develop an input shaper for the distorted command [
11].
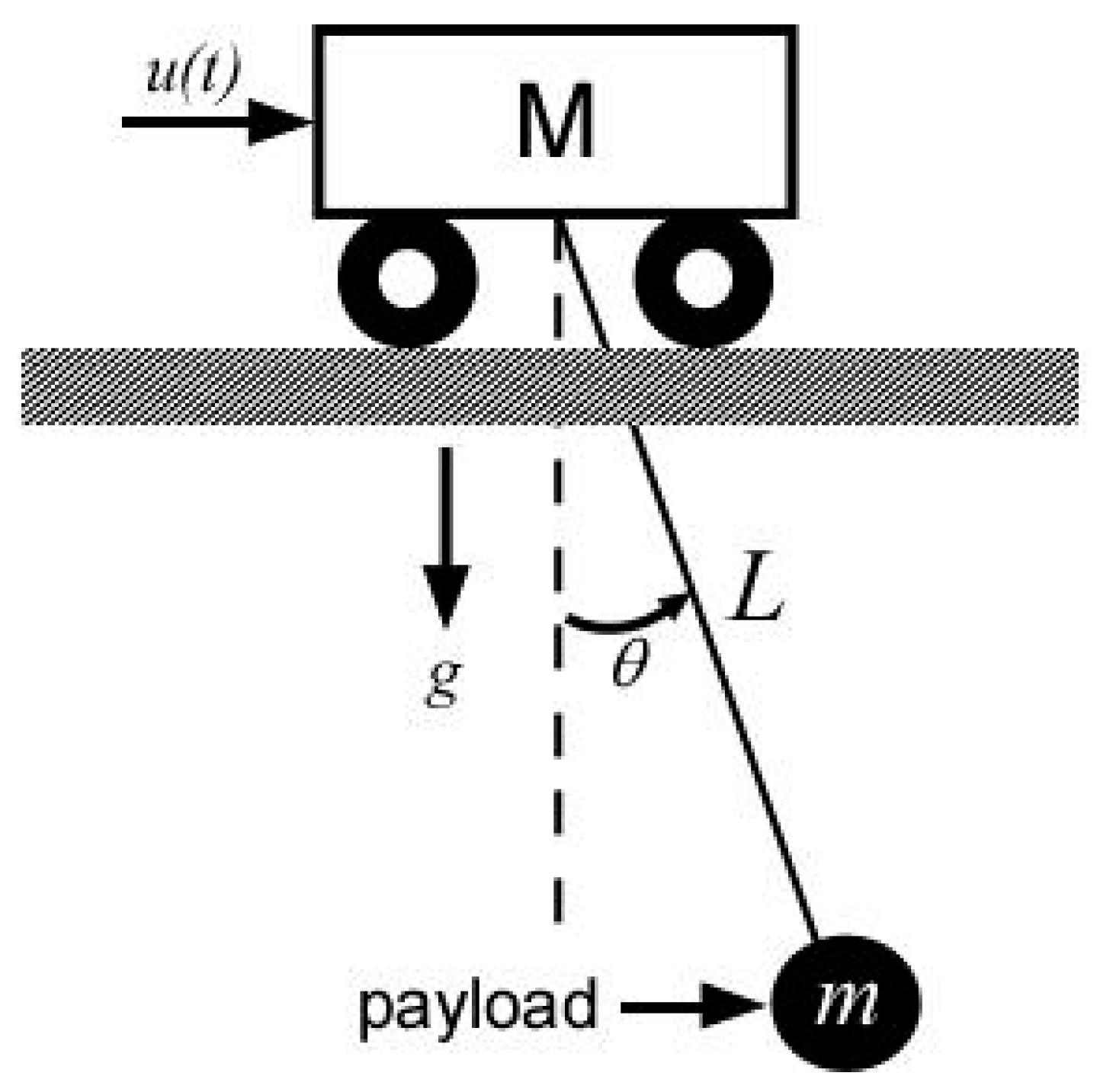
To present the two types of robust input shapers using the modified process described above, a single-pendulum system was utilized with ramp-type input commands, as shown in
Figure 4. The equation of motion is given as:
where
represents the velocity input command,
L represents the system string length from the trolley to the payload, and
g represents the gravitational acceleration. Assuming that
is sufficiently small, Equation (2) is Laplace transformed as:
where
represents the Laplace transform of
. The output
of the system is reformulated as the system input
and the sine input to be expressed in phasor form as:
As a key point in the input shaping technique, the steady-state equation can be expressed according to Equation (4) as:
For no residual oscillation,
in Equation (5) must be zero. Therefore,
can be determined by dividing a command by the impulse time of the input shaper, as presented in
Figure 5b, in an acceleration-limit input command in rising mode, as shown in
Figure 5a.
As shown in
Figure 5, the acceleration limit of the actuator must be considered. The equivalent shaper formulation under the acceleration rate limit can be used with the following restrictions:
Here,
and
represent the acceleration and deceleration constants, respectively. This condition is enforced to obtain the acceptable control performance of the proposed input shapers without collapsing the command profile. As an analytical approach by utilizing a phaser-vector form of the response function of the pendulum system, a ramp-shaped input command is expressed as:
where
represents the function of each region, as displayed in
Figure 5. The following equation is obtained via approximation of the nonuniform acceleration and deceleration of the actuator with a ramp-shaped function:
where
represents the velocity slope, which is determined according to the acceleration or deceleration, and
represents the desired velocity, which can become the maximum velocity of the actuator. Taking the Laplace transform of Equation (8) for each region for vector matching yields:
Using the steady-state response equation in Equation (5), and the magnitude and phase angle of the ramp-shaped input command vector, the command vector of each segment in
Figure 5 can be represented as
To equate Equation (5) to zero, the vectors in Equation (11), can be scaled, rotated, or reflected across the real axis without affecting the results. For the vectors to sum to zero, they must form a closed triangle. In addition, the amplitudes of conventional robust input shapers were considered to satisfy the actuator performance limit.
2.1. ZVDAL Input Shaper for Ramp Actuators
This subsection proposes a robust input shaper called the ZVD
AL shaper for a wide range of modeling errors in flexible systems with a ramp-shaped velocity profile owing to an acceleration-limit actuator. A robust input shaper is presented utilizing a conventional robust shaper (ZVD shaper) to satisfy the actuator performance constraint and obtain an exact solution without a parameter optimization formulation. The ZVD shaper [
8] for linear damped systems is expressed as:
where
T represents the period and
is the damping ratio of a system oscillation with
K =
. In the development of
, the damping ratio is assumed as
. The vector equations in Equation (11) can be expressed assuming that the impulse magnitudes (
= 0.25,
= 0.5, and
= 0.25) of the
shaper are
Normalizing the command vectors in Equations (13)–(15), the phasor vectors can be expressed as:
where
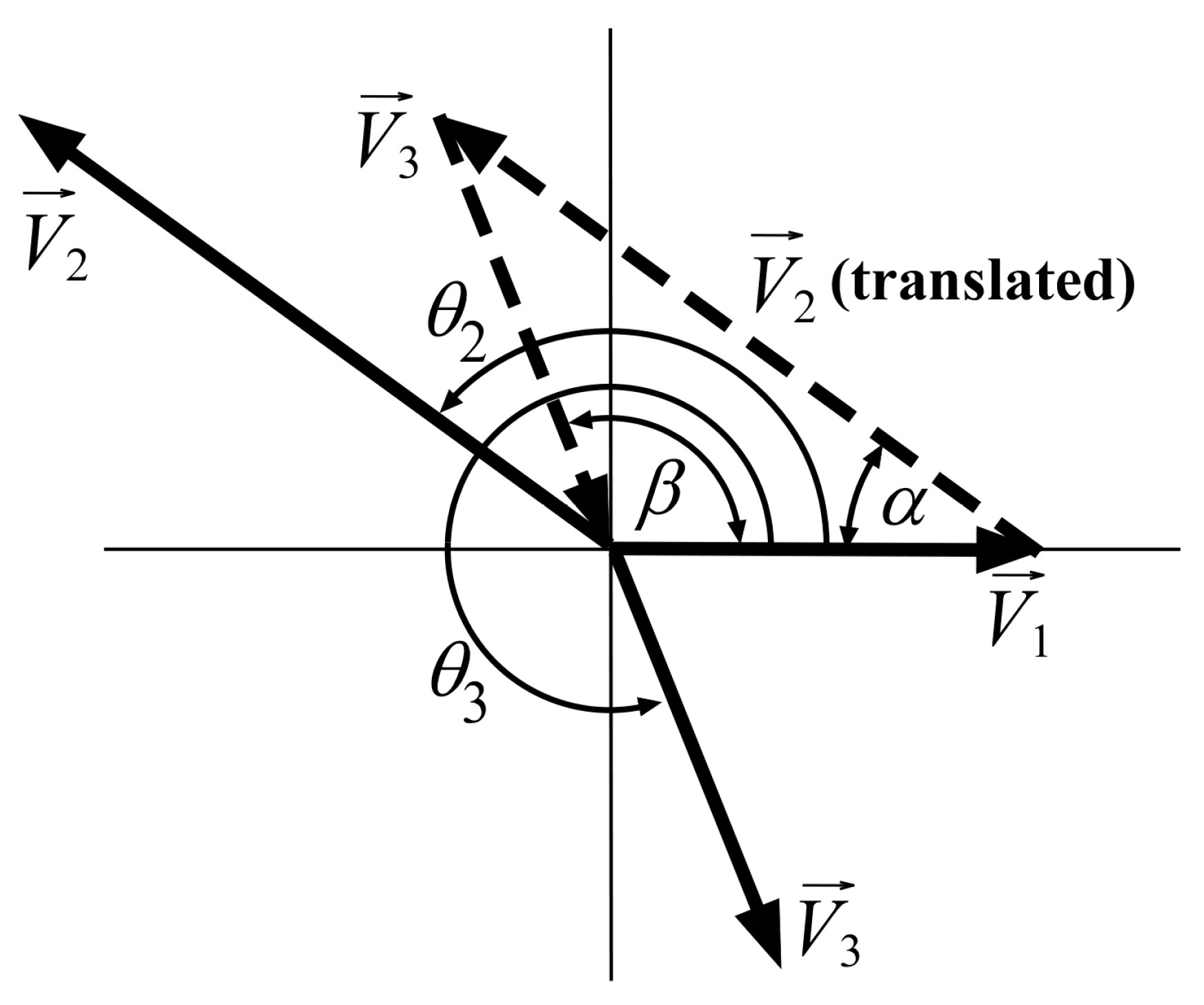
The normalized phase vector equations above can be employed to control the residual deflection using a vector diagram. Each vector of the ZVD
AL shaper for the ramp actuator is displayed in
Figure 6. The magnitude of the residual deflection is determined by the sum of the three vectors. The angle between
and
(dotted line) is denoted as
and the angle between
and
(dotted line) is denoted as
, as in
Figure 6.
and
are determined using the cosine law as:
The phase angles obtained using the vector geometry in
Figure 6 and Equations (17) and (18) can be represented as
and
. The impulse time locations of the ZVD
AL shaper are then determined as
The impulse time
must be a real number and the inverse cosine function must include a positive value because
must exist after
. Each switch time for the stop operation was calculated using the same procedure as that for the start operation. The sign of the impulse magnitude changes asymmetrically, and acceleration and deceleration are considered accordingly.
and
for the stop operation are expressed as:
where
=
denotes the pulse duration of the initial input command. The constraint of Equation (26) must be satisfied to verify the effect of the residual deflection performance of the ZVD
AL shaper when a ramp-shaped input is assumed to be:
When Equation (26) is satisfied, the ZVD
AL shaper reduces the residual deflection in a flexible system with a ramp actuator. Using Equations (22)–(25), the ZVD
AL shaper for the stop and start commands of the flexible system can be expressed as:
Equation (27) is used to generate a ramp-shaped command using an actuator with asymmetric acceleration and braking through convolution on a robust input command. The analytical development procedure for the ZVDAL shaper could be expanded to generate various input-shaped commands for acceleration-limit actuators.
2.2. EIAL Input Shaper for Ramp Actuators
In this subsection, a robust input shaper called the EI
AL shaper is proposed for reducing a wide range of modeling errors by allowing a certain level ratio (%) of the residual oscillation magnitude under ramp actuators. As in the previous derivation, a robust input shaper was developed by employing a classical EI shaper for the actuator performance constraint and an exact solution for practical implementation. The solution to the EI shaper [
9] is expressed as:
where
represents the percentage ratio (%) of the allowed residual deflection magnitude in an unshaped case and
T represents the period of the flexible systems. Assuming that the impulse magnitudes (
,
, and
) are given for the EI
AL shaper, the vector equations from Equation (11) can be obtained as
Normalizing the command vectors yields the following phasor vectors:
where
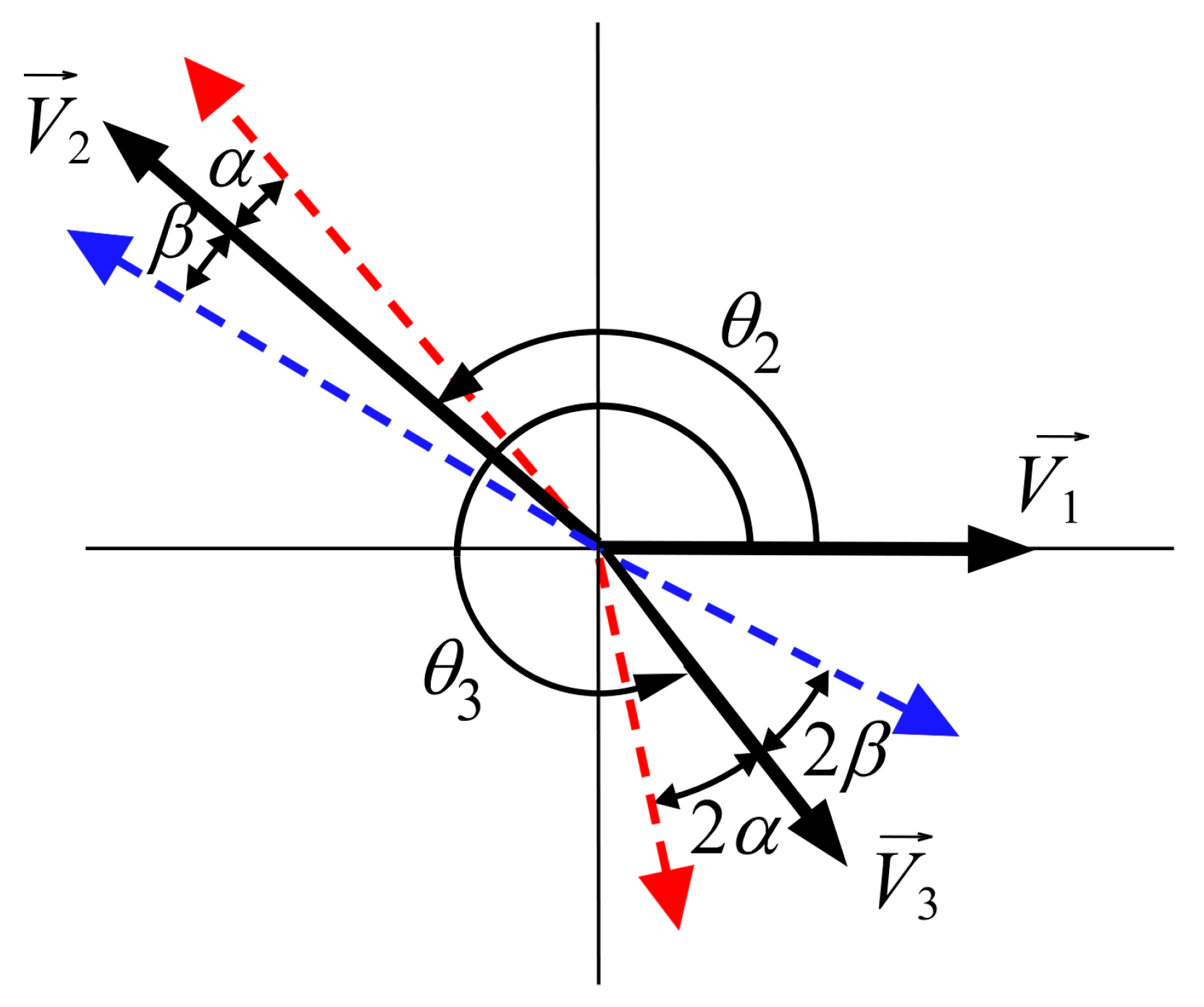
The normalized phasor-vector equations are depicted as vector diagrams in
Figure 7. From the sensitivity curve of the
shaper shown in
Figure 1, the geometric constraints can be set to derive the
shaper. The resultant of the 3 vectors, indicated by the black solid arrows at
/
= 1, must have an allowable deflection magnitude ratio,
. For the symmetricity of the sensitivity curve about the modeling frequency,
is always constrained [
9]. In forcing the sensitivity curve on either side of
/
=1 to achieve zero residual oscillation, the vector resultant must be zero regarding either
or
, where
and
are uncertain angle deviations from
/
= 1. With the cosine law and the trigonometric identity, the resultant constraints in
/
1 are expressed as:
The resultant constraints in
/
1 are similar to the above equations except for the
deviation. Then, the amplitude condition is obtained as
By setting the resultant magnitude equal to the oscillation limit,
at
/
= 1, the resultant constraint with Equation (38),
and
, can be expressed as:
where
represents the magnitude of unshaped vibrations. Using
at
/
=1,
is obtained. From Equations (32)–(35) and (39), the time locations of the EI
AL shaper are expressed as:
The switch time for stop operations was the same as that for start operations. The sign of the impulse magnitude changed asymmetrically. In stop operations, deceleration (
) is used instead of acceleration (
) in start operations, and the impulse times
and
for the stop operation are given by:
where
represents the pulse duration at the start of the operation. The EI
AL shaper must be used under the constraint of Equation (26) owing to the slope of the ramp-shaped velocity profile, similar to the ZVD
AL shaper presented in the previous subsection. Under the condition of a ramped velocity profile, the EI
AL shaper reduced the residual deflection in a flexible system with a ramp actuator. Using Equations (40)–(43), the EI
AL shaper for the start and stop operations of the flexible system can be expressed as
Equation (44) is used to generate a ramp-shaped command using an actuator with asymmetric acceleration and braking through convolution on a robust input command. The analytical development procedure for the EIAL shaper can be expanded to generate commands for various shapes using acceleration-limit actuators.
4. Experimental Verification
As described in this section, the control performances of the proposed ZVD
AL and EI
AL shapers were experimentally compared with those of ZVD and EI shapers for robustness to the uncertainties of the system and actuator parameters. The mini bridge crane in
Figure 18 has dimensions of 1.3 m (length) × 0.75 m (width) × 1.5 m (height).
Figure 19 shows the hardware and software components of the mini bridge crane used for the experimental verification. Among the hardware components, a programmable logic controller (PLC) was connected to a computer via a wireless local area network to implement the proposed algorithm. The velocity command generated by the PLC is transmitted to the bridge and trolley motor drives. The drive uses an incoming command as the velocity-setting point of the motor. The motor drive used a synchronous AC motor constituting a communication module and a control driver. The system software of the mini bridge crane was programmed using CFC, SCL, and WinCC Flexible 2007 software with the functions of uploading and downloading the experimental data. The magnitude of the payload oscillation was measured using a vision program with a VS720-series vision sensor, which was written using Spectation
® software.
To confirm the testbed performance, the actual and shaped demanded commands for the measurement of the absolute encoder signal on the AC motor are shown in
Figure 20. To accurately generate the desired input command under the asymmetric acceleration and braking rates of the actuator with the proportional gain of 0.25, an integration gain of 10 ms was set in the motor control driver. For the parameters listed in
Table 1, the error velocity is shown within the range of
with small oscillations at the corner of the command. Therefore, the settings of the testbed and experimental input commands can be used to evaluate various input shapers.
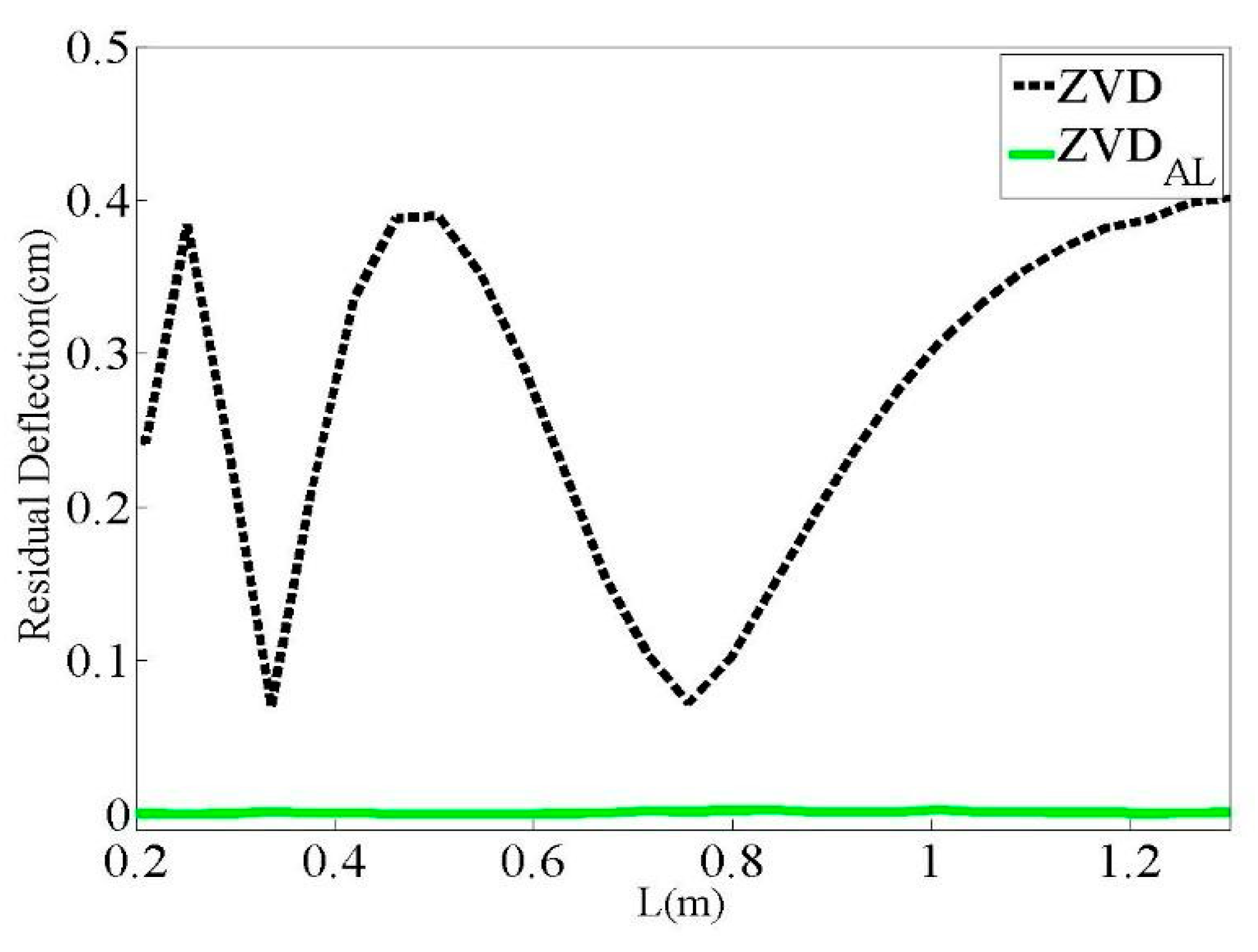
Figure 21 shows the residual deflections resulting from the actual command shown in
Figure 20 while measuring the payload oscillation using the vision sensor. The ZVD
AL shaper exhibited almost zero residual deflection, whereas the ZVD shaper produced a periodic residual deflection with an amplitude of 1.2 cm. However, the EI
AL shaper generated an oscillation magnitude comparable to that of the EI shaper owing to the allowable residual deflection. The inclusion of actuator dynamics in the shaper design was necessary to achieve better deflection reduction.
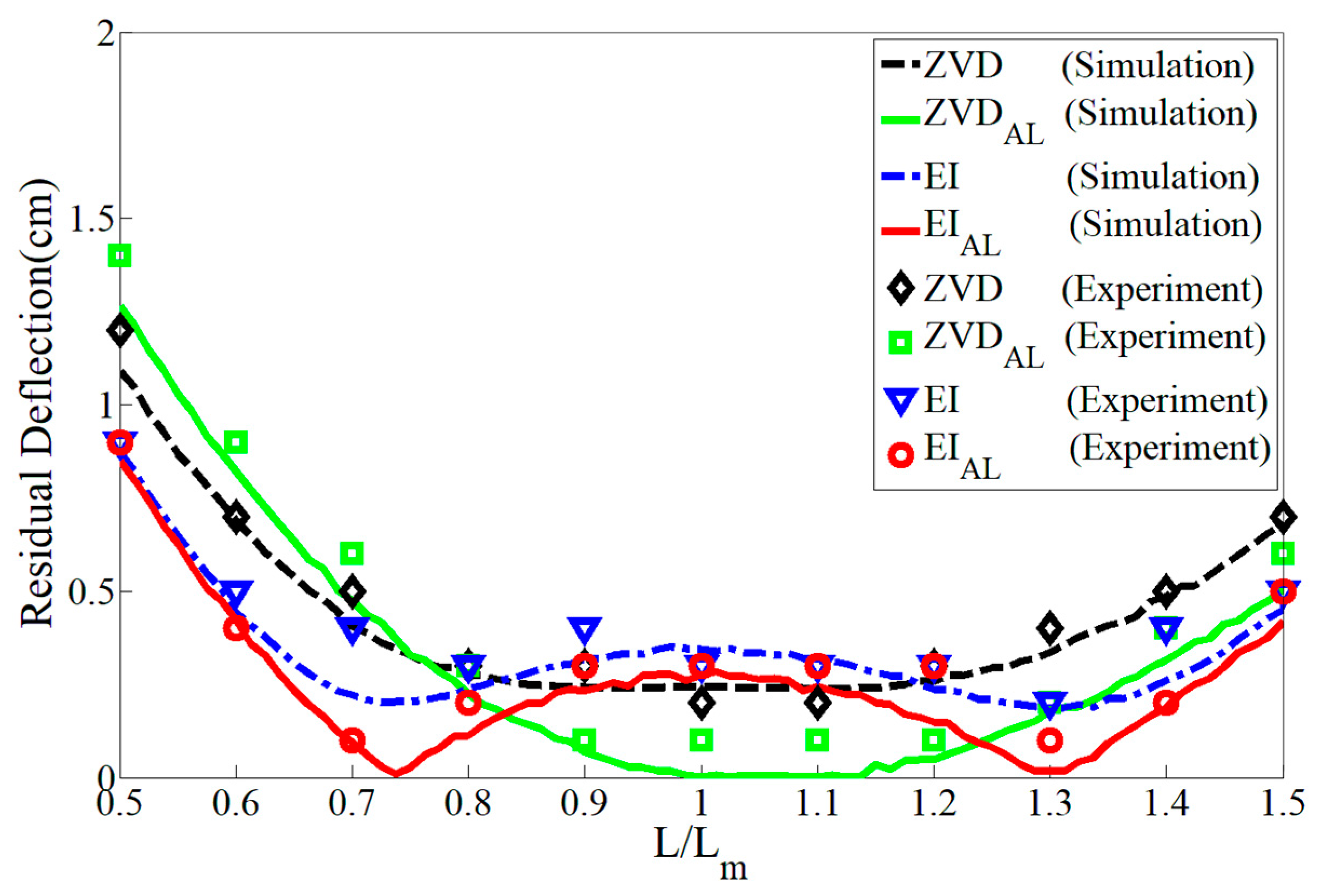
Figure 22 displays the numerical and experimental sensitivity comparison with uncertain cable length
. The experimental results are presented as the average values of the data obtained from multiple experiments. The ZVD
AL and EI
AL shapers exhibited better robustness than the ZVD and EI shapers, which exhibit residual deflections throughout the evaluation range of
. The ZVD
AL shaper was characterized by zero residual deflection at
whereas the ZVD shaper exhibits the same feature in the case of an ideal actuator. Furthermore, the EI
AL shaper produces one hump and two zero-residual deflections, which are observed for the EI shaper in the case of an ideal actuator. Therefore, the residual deflection reduction performances of the ZVD
AL and EI
AL shapers are predictable, whereas the ZVD and EI shapers produce large residual deflections in the case of acceleration-limit actuators.
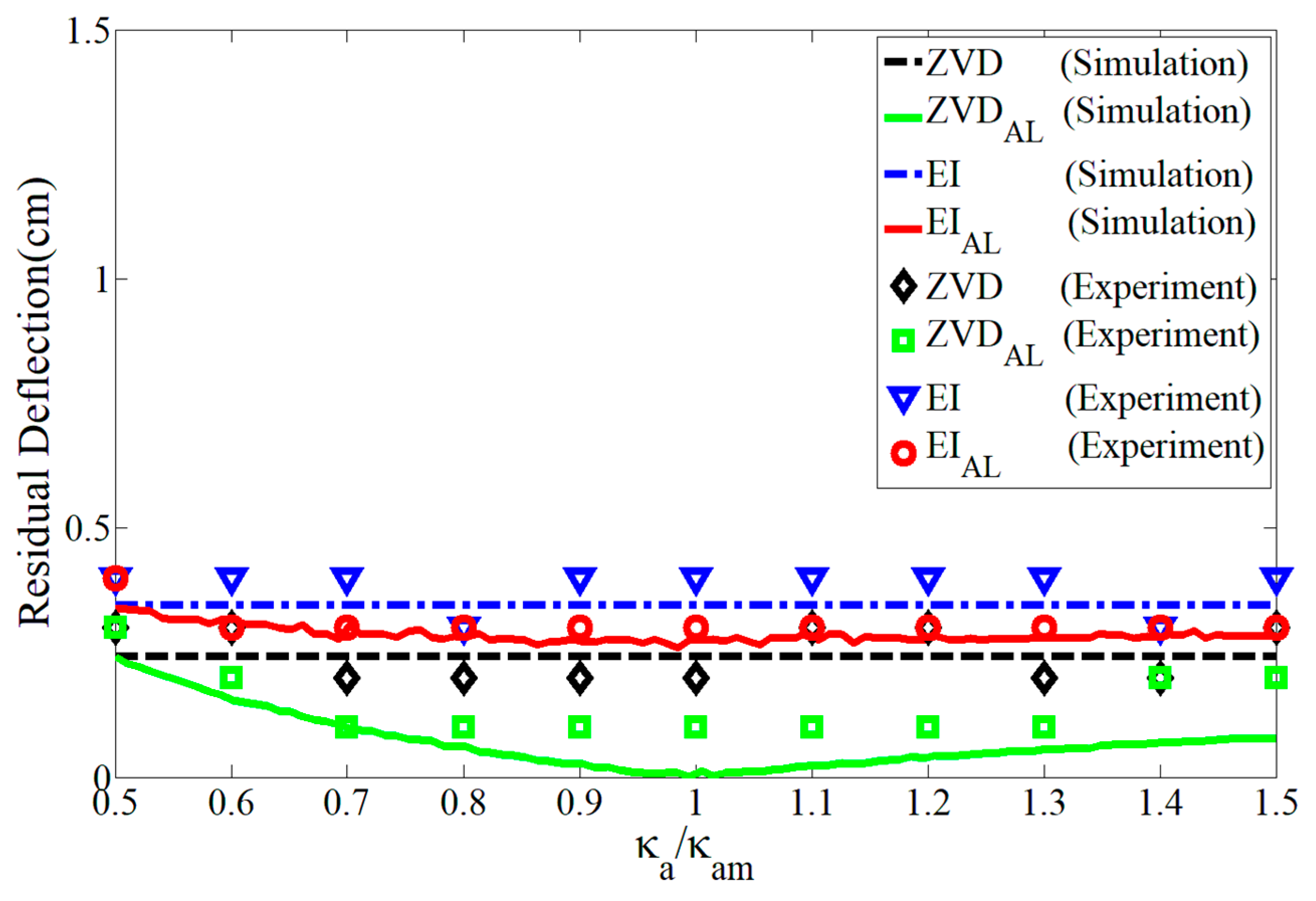
Figure 23 depicts the numerical and experimental robustness performances as a function of actuator parameter ratio
. The classical ZVD and EI shapers are unaffected by the actuator parameter as expected. The ZVD
AL shaper exhibits zero residual deflection at
whereas the ZVD shaper shows large residual deflection. The EI
AL and EL shapers exhibit similar residual deflection performances, characterized by the deflection allowance feature.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}