
Laplace Domain Boundary Element Method for Structural Health Monitoring of Poly-Crystalline Materials at Micro-Scale



Abstract
:1. Introduction
- To develop a computational framework for modeling dynamic waves propagation in poly-crystalline materials;
- To investigate the influence of grain morphology, size, and distribution;
- To investigate the possible scattering of UGWs due to the formation of voids and cracks;
- To assess the applicability of this computational framework when utilized to conduct the SHM of poly-crystalline materials.
- Aids in improving and better understanding wave–material interactions and the material micro- and macro-scale features, including random defects (those that are very difficult or impossible to assess with experiments);
- Developing numerical models can lead to reducing the number of experiments; hence, reducing cost and time;
- Numerical models being used to complement experiments to investigate micro-structural features can possibly improve the safety and lifespan of engineering structures in aerospace, oil and gas, and power plant fields.
2. Materials and Methods
2.1. Elastodynamic Boundary Integral Equation (BIE) in the Laplace Transform Formulation
- , nodal displacements and tractions at the external boundary;
- , nodal displacements and tractions at the grain–boundary interface.
2.2. Artificial Micro-Structure Generation: Voronoi Tessellation
2.3. Implementation of Missing Grains: Porosity (Voids/Pores)
- Localize the missing grains, as well as completely remove them from the micro-structure and from the calculation of the BE matrices;
- Consider the material elastic properties of the specific missing grain as very small (Young’s modulus and the Poisson ratio tended toward zero) compared with the ones of the other grains.
- After the generation of the micro-structure by utilizing the VT, the locations of the absent grains (pores) were determined and designated with a unique flag to facilitate their identification;
- The calculation of the BE matrices H and G was bypassed for the grains identified with a specific flag, and they were excluded from the population of the ultimate system of equations. This resulted in a consistent reduction in the equation system’s order;
- The boundary interfaces of the grains neighboring the absent ones (pores) were subjected to the imposition of free traction boundary conditions rather than enforcing interface continuity and equilibrium equations.
2.4. Elastodynamic Algorithm for UGW Propagation
3. Results and Discussion
- Numerical validation with experimental tests;
- Grain area distributions;
- Multi-region micro-structure for pristine structure using UGWs;
- Benchmark FEM vs. BEM;
- Missing grains (porosity);
- Parametric analysis with inter-granular cracks (debonding);
- Probability of Detection (PoD) with inter-granular cracks.
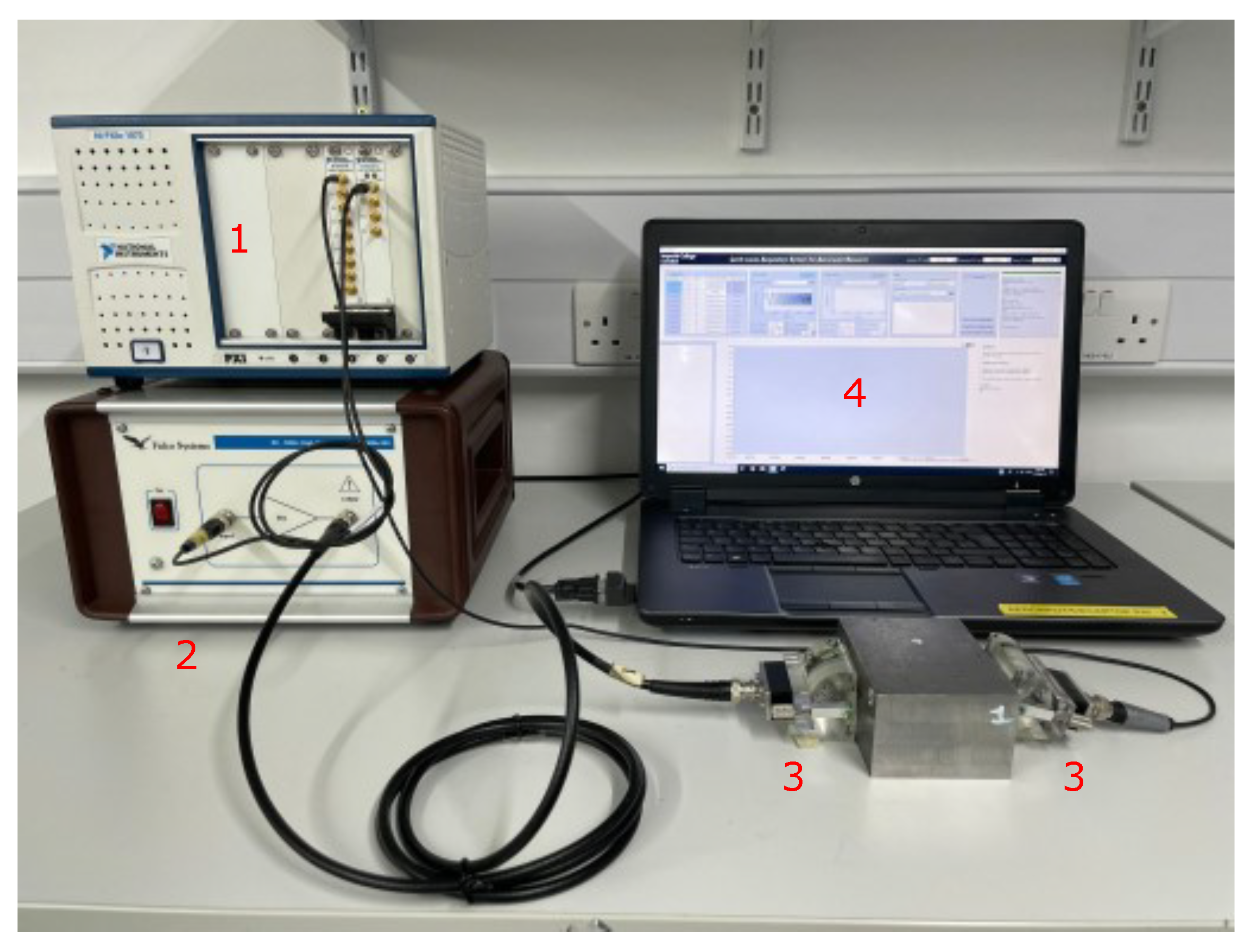
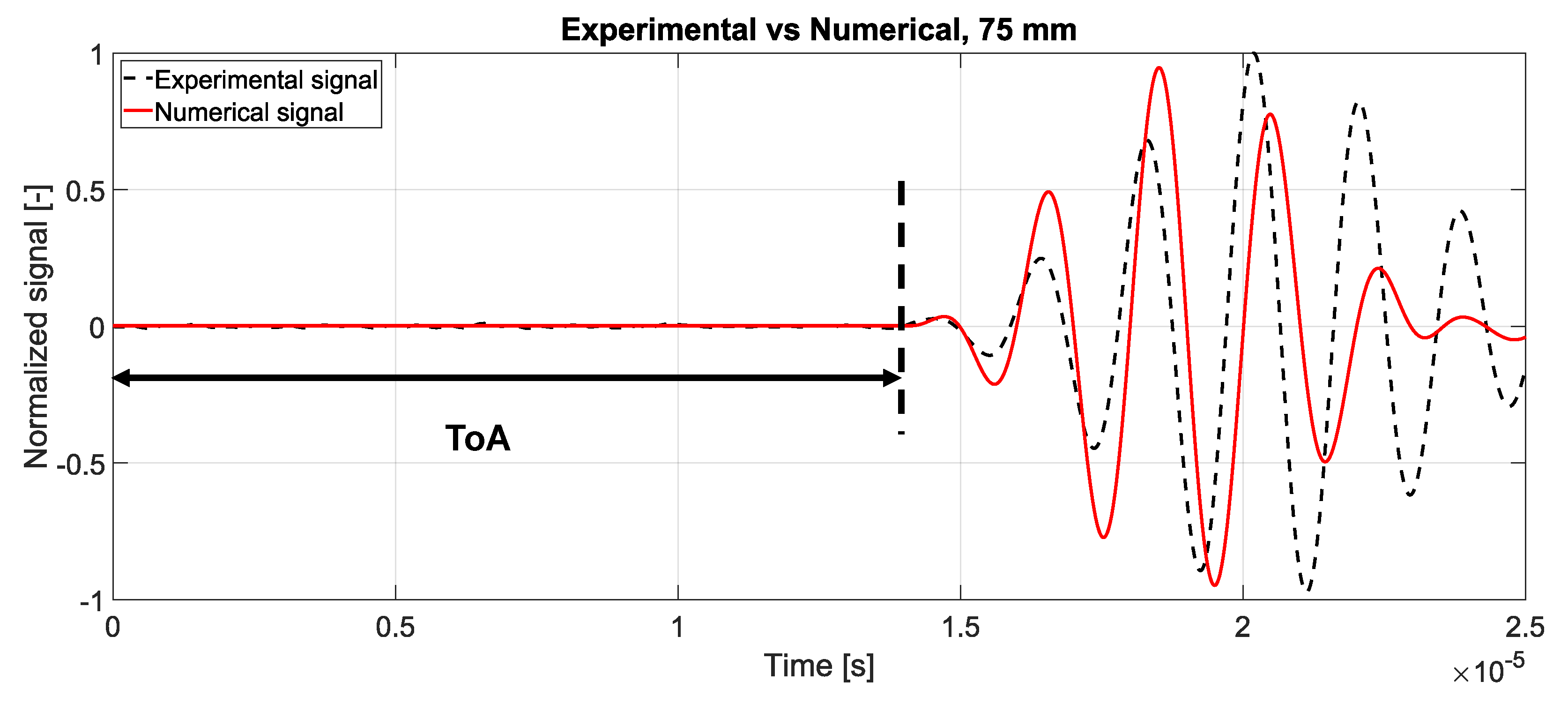
3.1. Numerical Validation with Experimental Tests
- The signal was generated with a NI-PXI wave generator;
- The actuation signal was amplified using the amplifier module;
- The resulting signal was applied by an Olympus A413S transducer to the specimen to initiate the desired response;
- Another transducer, functioning as a sensor, was employed to capture the resulting signals;
- The signal was acquired via an NI-PXI oscilloscope;
- For data acquisition and manipulation, a PC equipped with dedicated acquisition software was utilized.
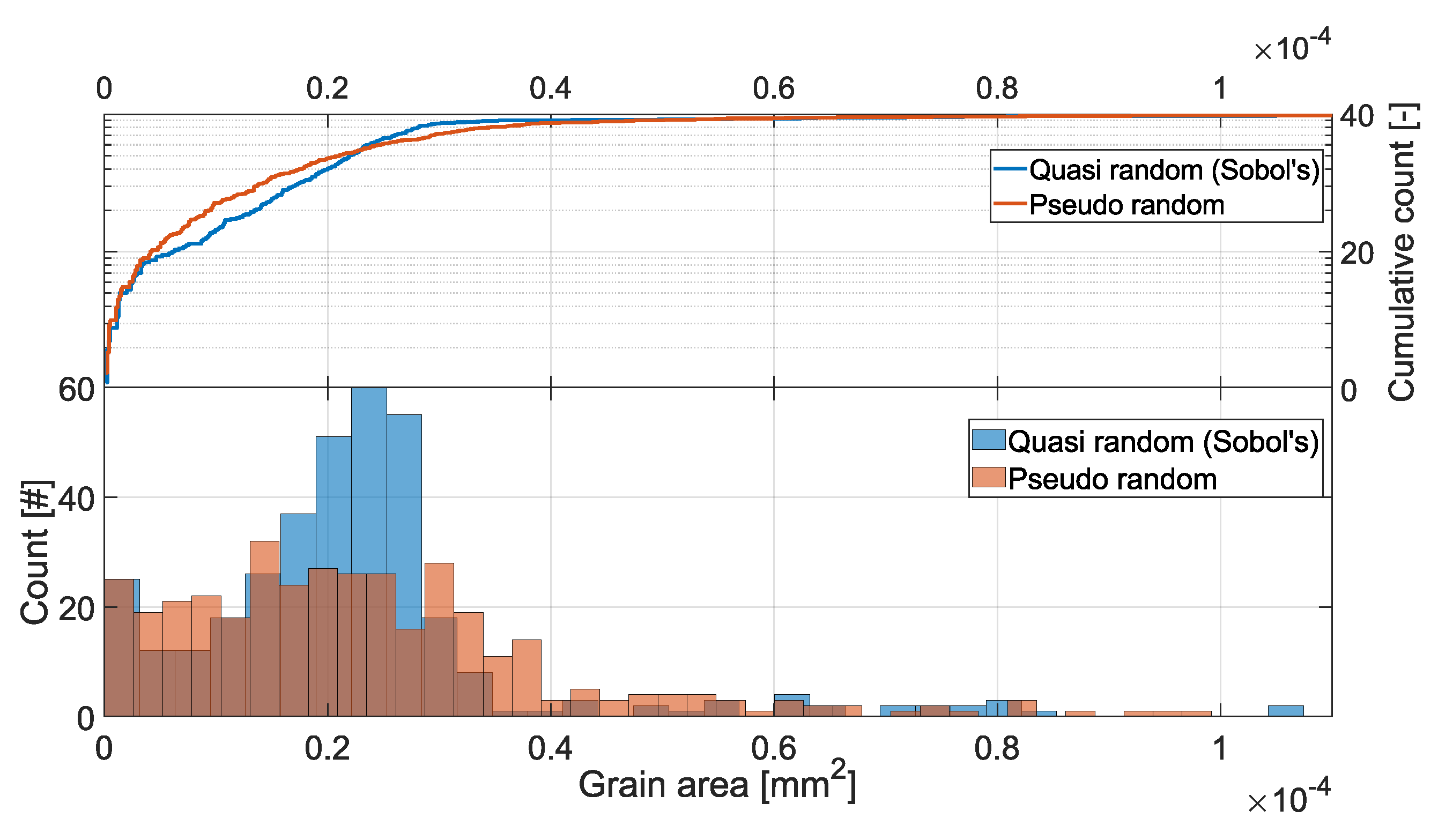
3.2. Grain Area Distributions
- A plot of the grain area vs. the # of grains;
- A plot of the grain area vs. the cumulative # of grains.
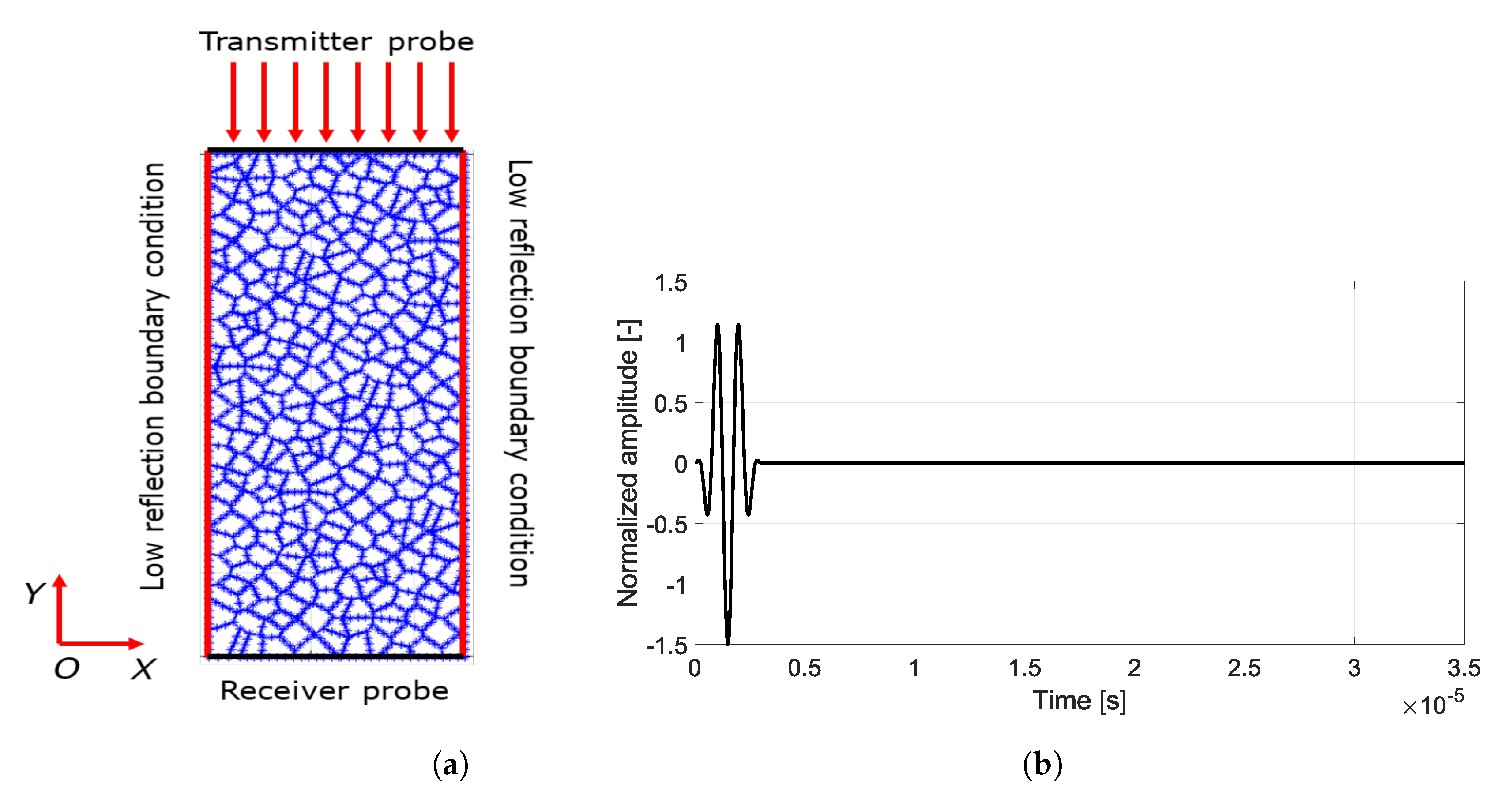
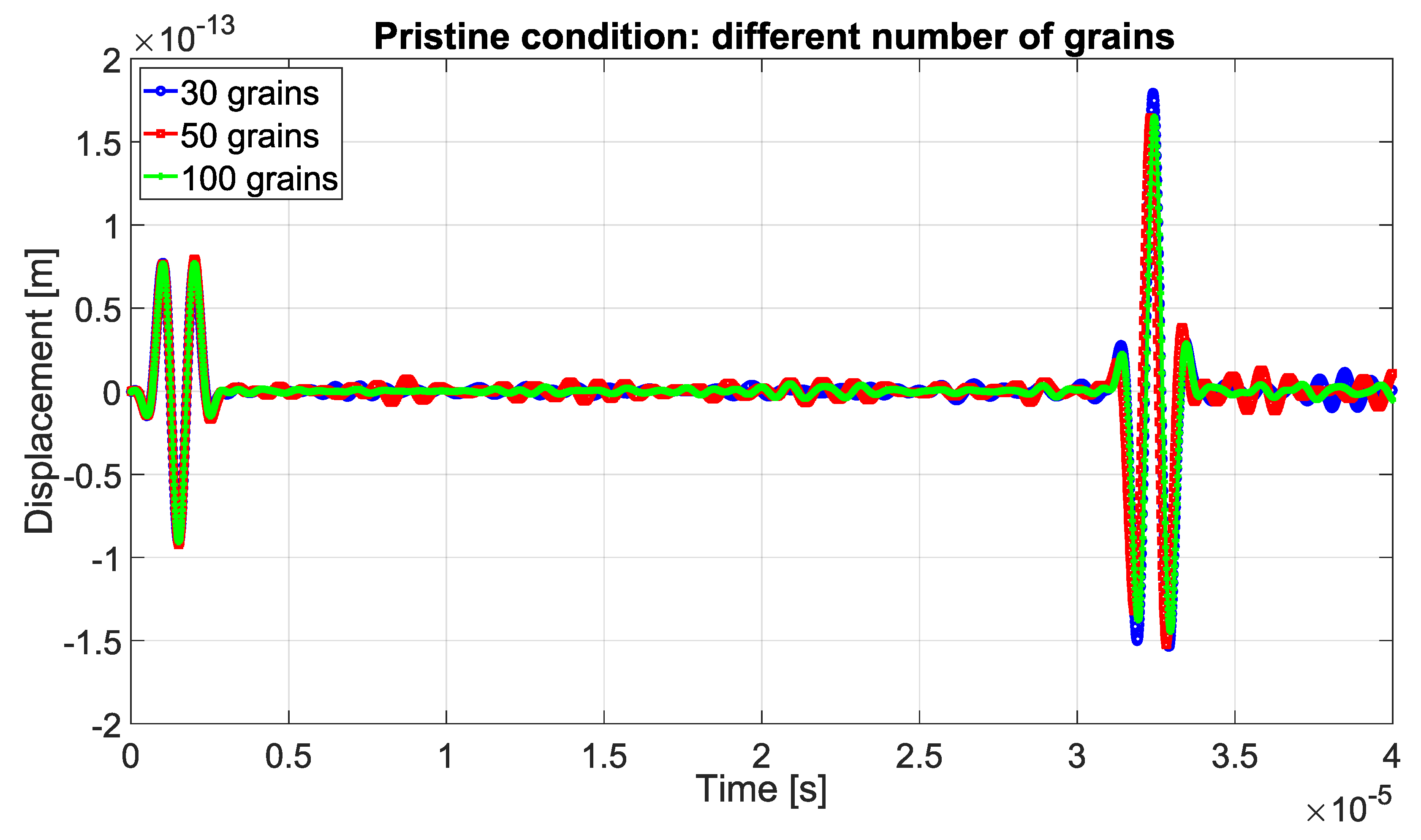
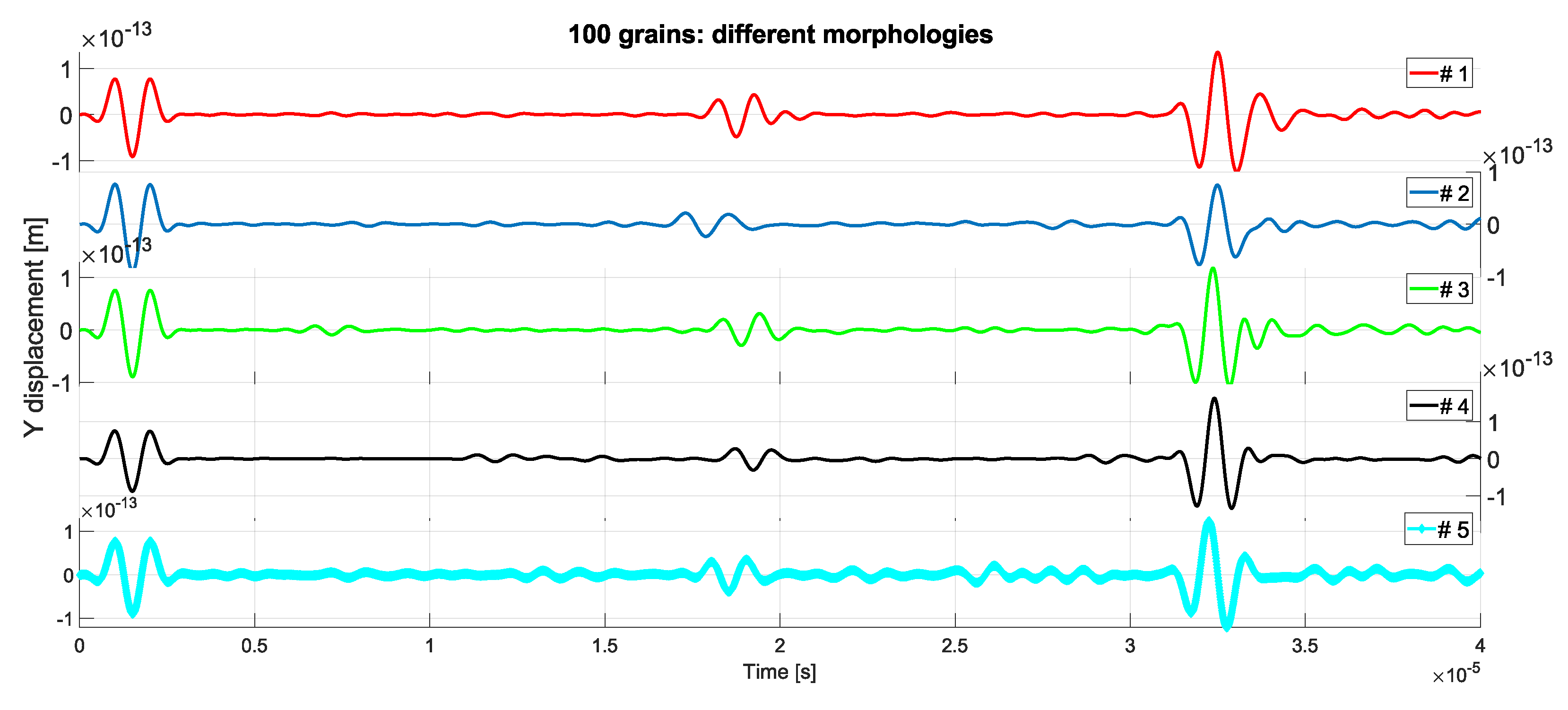
3.3. The Multi-Region Micro-Structure for Pristine Structures Using UGWs
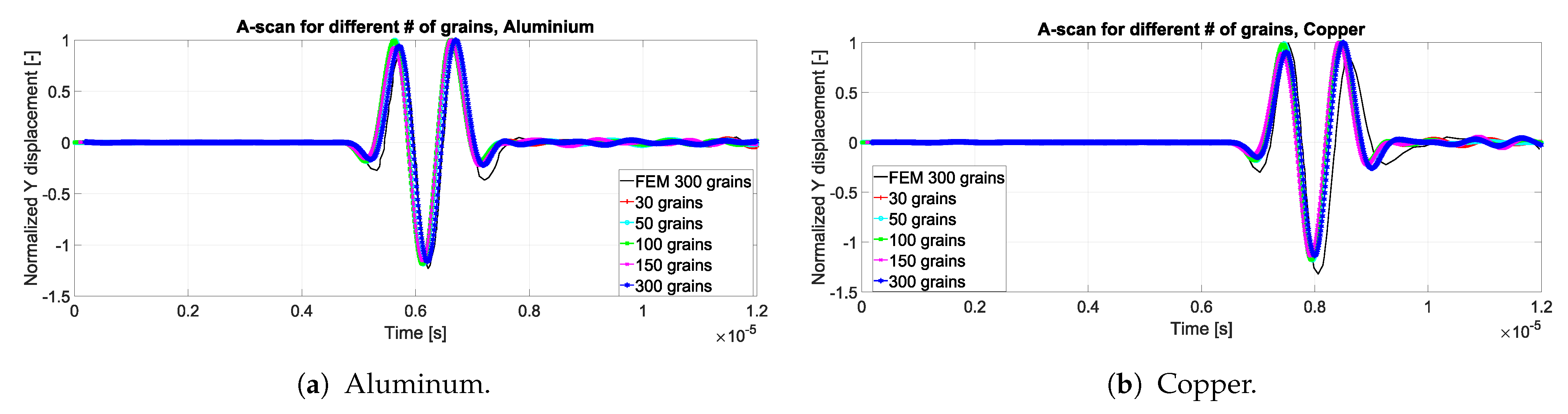
3.4. Benchmark FEM vs. BEM
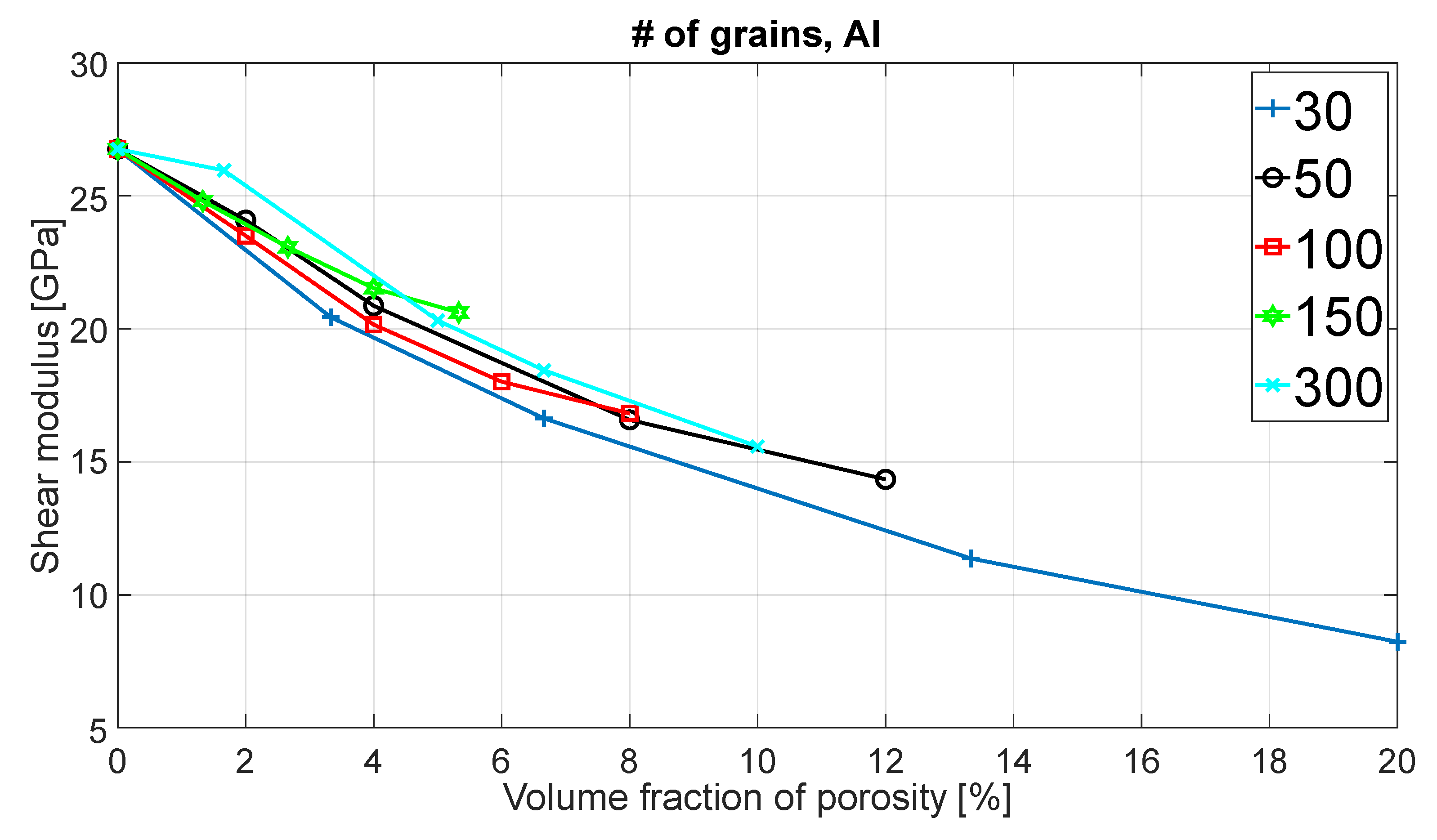
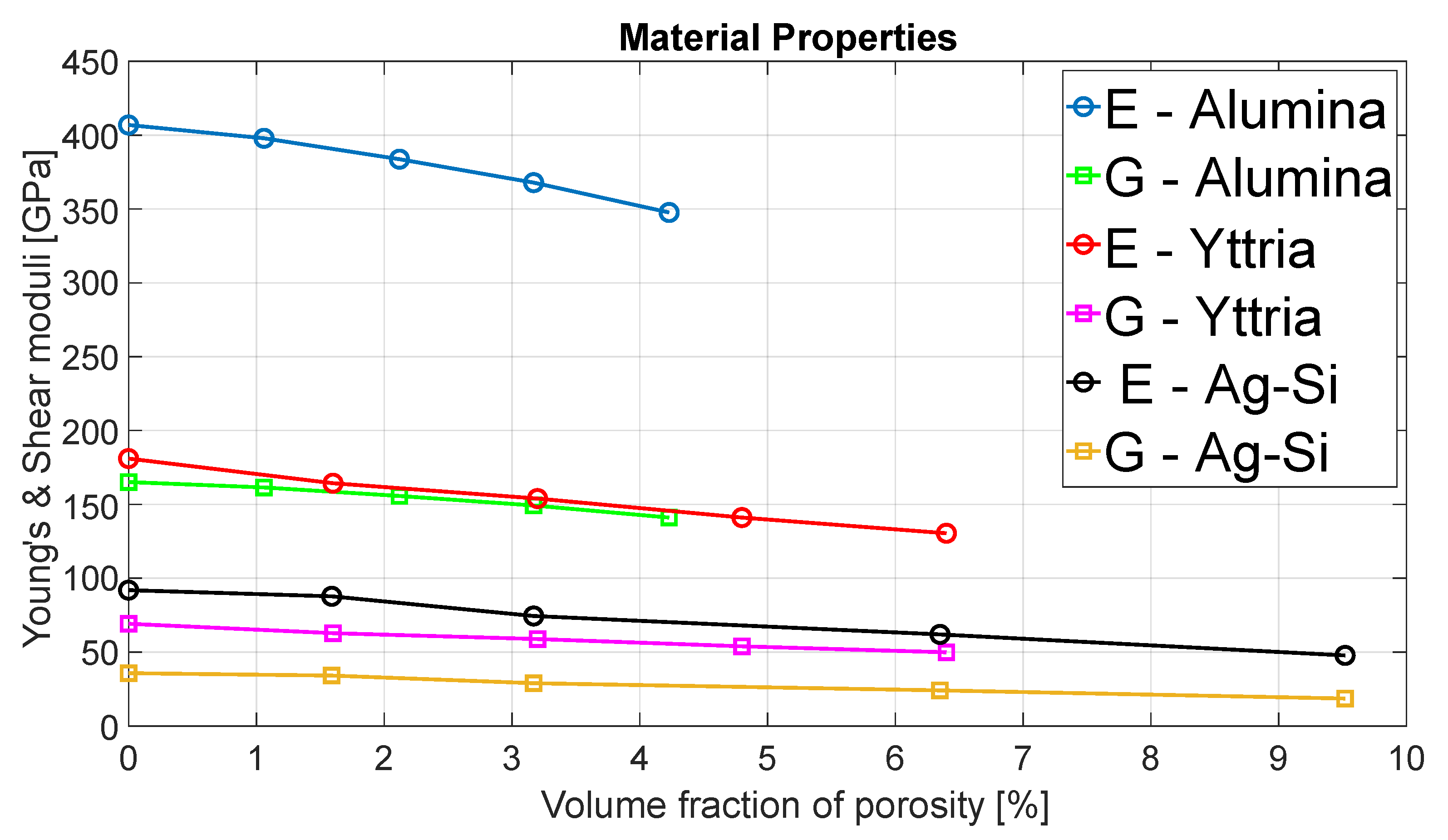
3.5. Missing Grains: Porosity
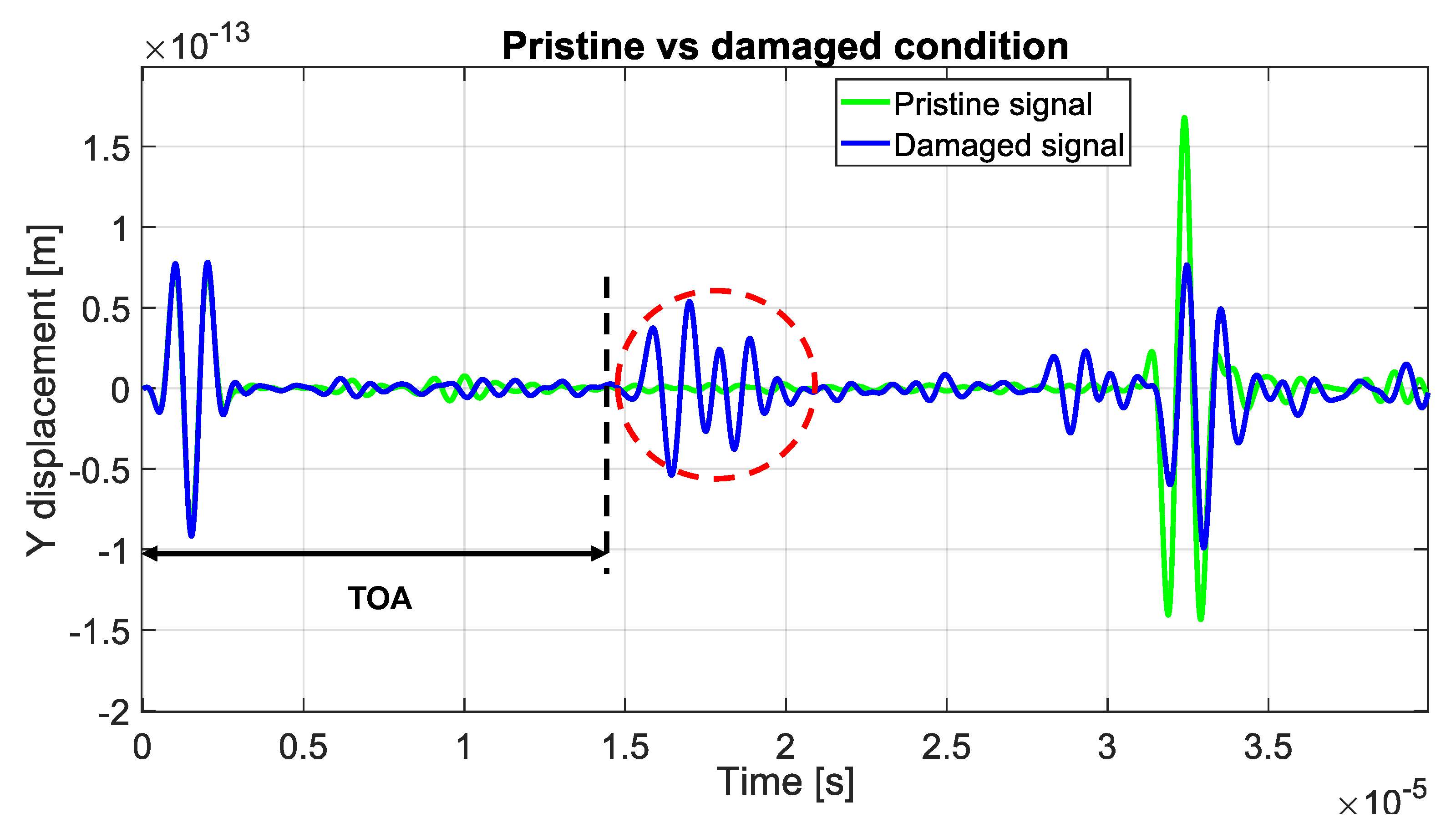
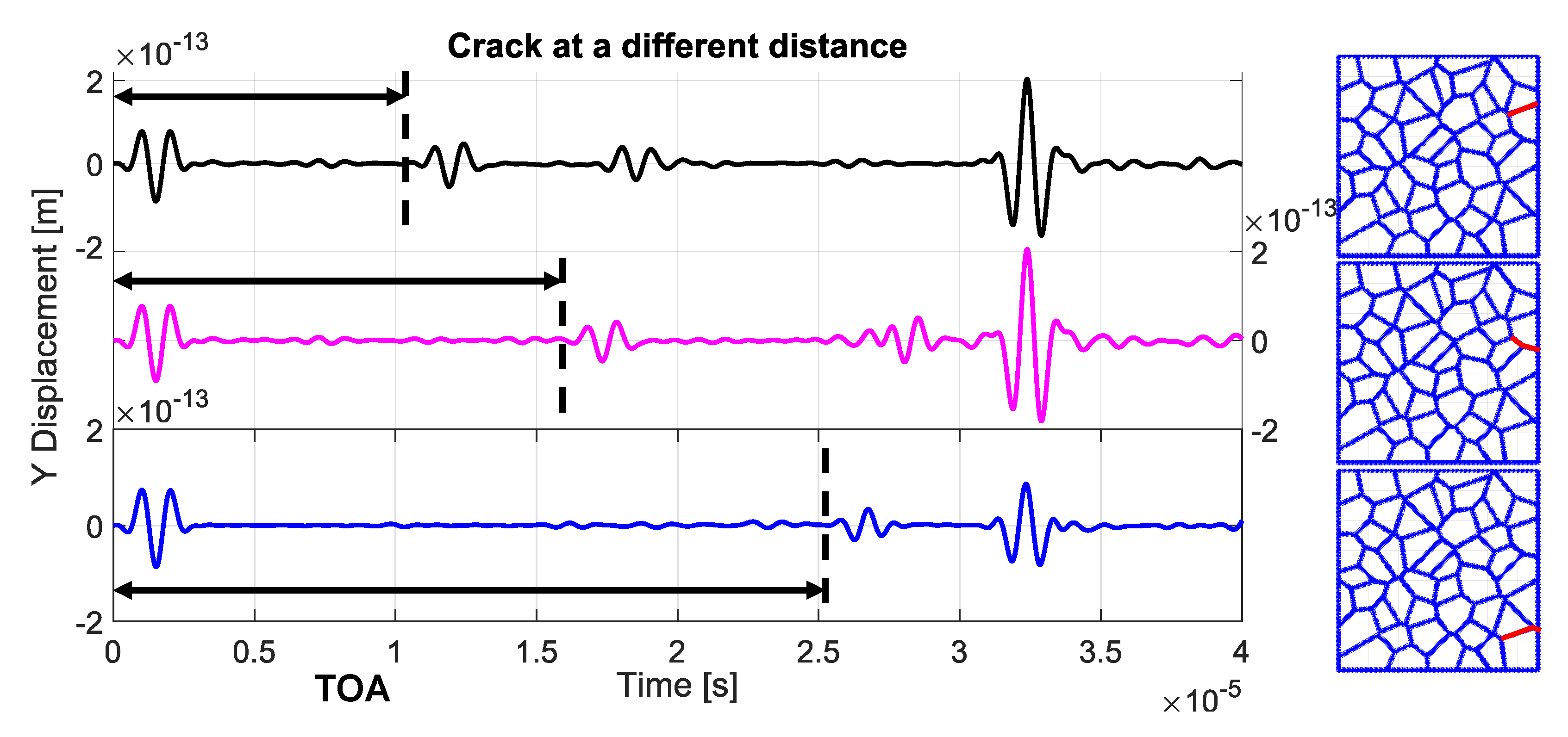
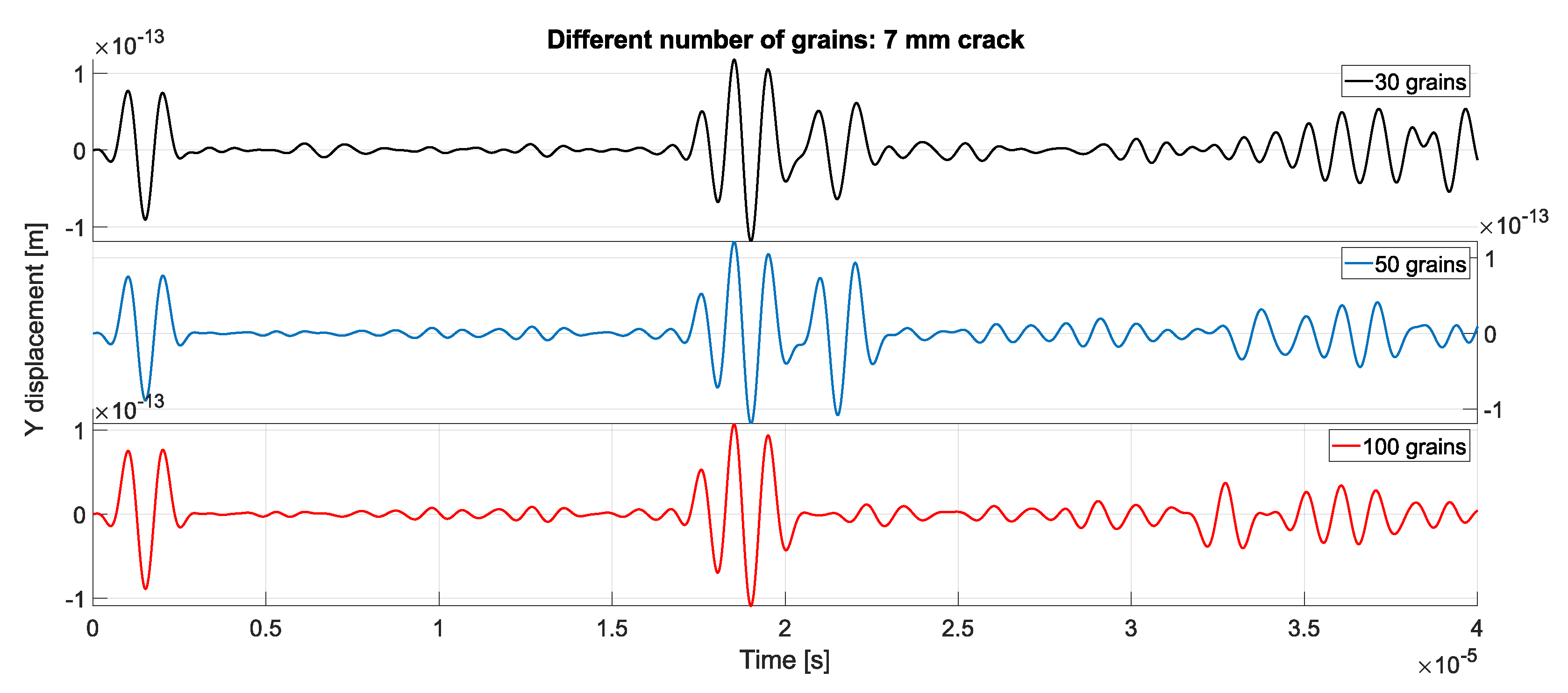
3.6. Parametric Analysis with Inter-Granular Cracks (Debonding)
- Position/orientation: the cracks were located at the same distance from the upper edge with equal length but were positioned at different locations (left, center, and right);
- Crack length: the cracks were situated at the same distance from the upper edge, but varied in length;
- Distance: the cracks had the same length but were positioned at different distances from the upper edge.
3.7. Probability of Detection (PoD) with Inter-Granular Cracks
- Fixing the morphology;
- Changing the frequency with a mean of 1 [MHz] and standard deviation of (uncertainty on frequency);
- Changing the location of the actuation signal (uncertainty on location).
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ASTM | American Society for Testing and Materials |
| BEM | Boundary Element Method |
| DI | Damage Index |
| FEM | Finite Element Method |
| FFT | Fast Fourier Transform |
| NDT | Non Destructive Testing |
| PoD | Probability of Detection |
| RVE | Representative Volume Element |
| SEM | Scanning Electron Microscopy |
| SHM | Structural Health Monitoring |
| ToA | Time of Arrival |
| UGWs | Ultrasonic Guided Waves |
| VTs | Voronoi Tessellations |
Appendix A. Isotropic Fundamental Solution
References
- Shivaprasad, S.; Pandala, A.; Krishnamurthy, C.; Balasubramaniam, K. Wave localized finite-difference-time-domain modelling of scattering of elastic waves within a polycrystalline material. J. Acoust. Soc. Am. 2018, 144, 3313–3326. [Google Scholar] [CrossRef] [PubMed]
- Geraci, G. Boundary Element Methods for Cohesive Thermo-Mechanical Damage and Micro-Cracking Evolution. Ph.D. Thesis, Imperial College London, London, UK, 2018. [Google Scholar]
- Raghavan, A. Guided-Wave Structural Health Monitoring. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2007. [Google Scholar]
- Sause, M.G.R.; Jasiuniene, E. Structural Health Monitoring Damage Detection Systems for Aerospace, 1st ed.; Springer Open: Berlin/Heidelberg, Germany, 2021; pp. 1–284. [Google Scholar]
- Ding, Y.; Ye, X.W.; Guo, Y. Data set from wind, temperature, humidity and cable acceleration monitoring of the Jiashao bridge. J. Civ. Struct. Health Monit. 2023, 13, 579–589. [Google Scholar] [CrossRef]
- Yuan, F.-G. Structural Health Monitoring (SHM) in Aerospace Structures, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 1–514. [Google Scholar]
- Ding, Y.; Ye, X.-W.; Guo, Y. A Multistep Direct and Indirect Strategy for Predicting Wind Direction Based on the EMD-LSTM Model. Struct. Control Health Monit. 2023, 1, 1–13. [Google Scholar] [CrossRef]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media, 1st ed.; Cambridge University Press: Cambridge, UK, 2014; pp. 1–507. [Google Scholar]
- Zou, F. A Boundary Element Method for Modelling Piezoelectric Transducer Based Structural Health Monitoring. Ph.D. Thesis, Imperial College London, London, UK, 2015. [Google Scholar]
- Aghaie-Khafri, M.; Honarvar, F.; Zanganeh, S. Characterization of grain size and yield strength in aisi 301 stainless steel using ultrasonic attenuation measurements. J. Nondestruct. Eval. 2012, 31, 191–196. [Google Scholar] [CrossRef]
- Grabec, M.; Sedlák, T.P.; Veres, I.A. Influence of grain morphology on ultrasonic wave attenuation in polycrystalline media with statistically equiaxed grains. J. Acoust. Soc. Am. 2018, 143, 219–229. [Google Scholar]
- Arguelles, A.P.; Turner, J.A. Ultrasonic attenuation of polycrystalline materials with a distribution of grain sizes. J. Acoust. Soc. Am. 2017, 141, 4347–4353. [Google Scholar] [CrossRef]
- Geraci, G.; Aliabadi, M. Micromechanical boundary element modelling of transgranular and intergranular cohesive cracking in polycrystalline materials. Eng. Fract. Mech. 2017, 176, 351–374. [Google Scholar] [CrossRef]
- Sfantos, G.; Aliabadi, M. A boundary cohesive grain element formulation for modelling intergranular microfracture in polycrystalline brittle materials. Int. J. Numer. Methods Eng. 2007, 69, 1590–1626. [Google Scholar] [CrossRef]
- Benedetti, I.; Barbe, F. Modelling Polycrystalline Materials: An Overview of Three-Dimensional Grain-Scale Mechanical Models. J. Multiscale Model. 2013, 5, 1–51. [Google Scholar] [CrossRef]
- Van Pamel, A.; Sha, G.; Rokhlin, S.I.; Lowe, M.J. Finite-element modelling of elastic wave propagation and scattering within heterogeneous media. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20160738. [Google Scholar] [CrossRef]
- Van Pamel, A.; Brett, C.R.; Huthwaite, P.; Lowe, M.J. Finite element modelling of elastic wave scattering within a polycrystalline material in two and three dimensions. J. Acoust. Soc. Am. 2015, 138, 2326–2336. [Google Scholar] [CrossRef]
- Levander, A.R. Fourth-order finite-difference P-SV seismograms. Geophysics 1988, 53, 1425–1436. [Google Scholar] [CrossRef]
- Souza, L.A.; Carrer, J.A.M.; Martins, C.J. A fourth order finite difference method applied to elastodynamics: Finite element and boundary element formulations. Struct. Eng. Mech. 2004, 17, 735–749. [Google Scholar] [CrossRef]
- Shivaprasad, S.; Krishnamurthy, C.; Pandala, A.; Saini, A.; Ramachandran, A.; Balasubramaniam, K. Numerical Modelling Methods for Ultrasonic Wave Propagation Through Polycrystalline Materials. Trans. Indian Inst. Met. 2019, 72, 2923–2932. [Google Scholar] [CrossRef]
- Fellinger, P.; Marklein, R.; Langenberg, K.J.; Klaholz, S. Numerical modeling of elastic wave propagation and scattering with EFIT—Elastodynamic finite integration technique. Wave Motion 1995, 21, 47–66. [Google Scholar] [CrossRef]
- Song, C.; Wolf, J.P. The scaled boundary finite-element method—Alias consistent infinitesimal finite-element cell method—For elastodynamics. Comput. Methods Appl. Mech. Eng. 1997, 147, 329–355. [Google Scholar] [CrossRef]
- Gravenkamp, H. Numerical Methods for the Simulation of Ultrasonic Guided Waves. Ph.D. Thesis, TU Braunschweig, Braunschweig, Germany, 2014. [Google Scholar]
- Sha, G. Analytical attenuation and scattering models for polycrystals with uniform equiaxed grains. J. Acoust. Soc. Am. 2018, 143, EL347–EL353. [Google Scholar] [CrossRef]
- Ghoshal, G.; Turner, J.A. Numerical model of longitudinal wave scattering in polycrystals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 1419–1428. [Google Scholar] [CrossRef]
- Dupond, O.; Feuilly, N.; Chassignole, B.; Fouquet, T.; Moysan, J.; Corneloup, G. Relation between ultrasonic backscattering and microstructure for polycrystalline materials. J. Phys. Conf. Ser. 2011, 269, 1–8. [Google Scholar] [CrossRef]
- Liu, Y.; Van Pamel, A.; Nagy, P.B.; Cawley, P. Investigation of ultrasonic backscatter using three-dimensional finite element simulations. J. Acoust. Soc. Am. 2019, 145, 1584–1595. [Google Scholar] [CrossRef]
- Pandala, A.; Shivaprasad, S.; Krishnamurthy, C.; Balasubramaniam, K. Modelling of Elastic Wave Scattering in Polycrystalline Materials. In Proceedings of the 8th International Symposium on NDT in Aerospace, Bangalore, India, 3–5 November 2016; Volume 22, pp. 1–9. [Google Scholar]
- Li, J. Boundary Element Plate Formulations for Dynamic Fracture and Ultrasonic Guided-Wave Structural Health Monitoring. Ph.D. Thesis, Imperial College London, London, UK, 2020. [Google Scholar]
- Aliabadi, M.H.F. The Boundary Element Method, Volume 2: Applications in Solids and Structures, 1st ed.; John Wiley & Sons: Chichester, UK, 2002; pp. 1–593. [Google Scholar]
- Liu, E.; Zhang, Z. Numerical Study pf Elastic Wave Scattering by Cracks or Inclusions Using the Boundary Integral Equation Method. J. Comput. Acoust. 2001, 9, 1039–1054. [Google Scholar] [CrossRef]
- Schafbuch, P.J.; Thompson, R.B.; Rizzo, F.J. Application of the boundary element method to elastic wave scattering by irregular defects. J. Nondestruct. Eval. 1990, 9, 113–127. [Google Scholar] [CrossRef]
- Fedelinski, P.; Aliabadi, M.; Rooke, D. The laplace transform DBEM for mixed-mode dynamic crack analysis. Comput. Struct. 1996, 59, 1021–1031. [Google Scholar] [CrossRef]
- Fedelinski, P.; Aliabadi, M.; Rooke, D. A single-region time domain BEM for dynamic crack problems. Int. J. Solids Struct. 1995, 32, 3555–3571. [Google Scholar] [CrossRef]
- Cruse, T.A.; Rizzo, F.J. A direct formulation and numerical solution of the general transient elastodynamic problem. I. J. Math. Anal. Appl. 1968, 22, 244–259. [Google Scholar] [CrossRef]
- Cruse, T.A. A direct formulation and numerical solution of the general transient elastodynamic problem. II. J. Math. Anal. Appl. 1968, 22, 341–355. [Google Scholar] [CrossRef]
- Vetterling, W.T.; Press, W.H.; Teukolsky, S.A.; Flannery, B.P. Numerical Recipes in Fortran, the Art of Scientific Computing, 1st ed.; Cambridge University Press: Cambridge, UK, 1994; pp. 1–973. [Google Scholar]
- Hearmon, R.F.S. Numerical Data and Functional Relationships in Science and Technology: Group III, Crystal and Solid State Physics, Vol. 1, Elastic, Piezoelectric Piezooptic and Electrooptic Constants of Crystals, 1st ed.; Hellwege, K.H., Ed.; Springer: Berlin/Heidelberg, Germany, 1966. [Google Scholar]
- American Society for Testing and Materials (ASTM). Standard test methods for determining average grain size, e112-13. ASTM Int. 2013, 1, 1–28. [Google Scholar]
- Schneider, C.A.; Rasband, W.S.; Eliceiri, K.W. Nih image to imagej: 25 years of image analysis. Nat. Methods 2012, 9, 671–675. [Google Scholar] [CrossRef]
- Van Pamel, A.; Nagy, P.B.; Lowe, M.J. On the dimensionality of elastic wave scattering within heterogeneous media. J. Acoust. Soc. Am. 2016, 140, 4360–4366. [Google Scholar] [CrossRef]
- Van Pamel, A.; Huthwaite, P.; Brett, C.R.; Lowe, M.J. Numerical simulations of ultrasonic array imaging of highly scattering materials. NDT E Int. 2016, 81, 9–19. [Google Scholar] [CrossRef]
- Van Pamel, A.; Huthwaite, P.; Brett, C.; Lowe, M. A finite element model investigation of ultrasonic array performance for inspecting polycrystalline materials. AIP Conf. Proc. Am. Inst. Phys. 2015, 1650, 1007–1014. [Google Scholar]
- Boström, A.; Ruda, A. Ultrasonic Attenuation in Polycrystalline Materials in 2D. J. Nondestruct. Eval. 2019, 38, 47. [Google Scholar] [CrossRef]
- Van Pamel, A.; Huthwaite, P.; Brett, C.R.; Lowe, M.J.S. Finite element modelling of wave propagation in highly scattering materials. AIP Conf. Proc. 2016, 1706, 070001. [Google Scholar]
- Shivaprasad, S.; Balasubramaniam, K.; Krishnamurthy, C.V. Voronoi based microstructure modelling for elastic wave propagation. AIP Conf. Proc. 2016, 1706, 070013. [Google Scholar]
- Asmani, M.; Kermel, C.; Leriche, A.; Ourak, M. Influence of porosity on young’s modulus and poisson’s ratio in alumina ceramics. J. Eur. Ceram. Soc. 2001, 21, 1081–1086. [Google Scholar] [CrossRef]
- Phani, K.K. Estimation of elastic properties of porous ceramic using ultrasonic longitudinal wave velocity only. J. Am. Ceram. Soc. 2007, 90, 2165–2171. [Google Scholar] [CrossRef]
- Chang, L.S.; Chuang, T.H. Characterization of alumina ceramics by ultrasonic testing. Mater. Charact. 2000, 45, 221–226. [Google Scholar] [CrossRef]
- Chen, H.L.R.; Zhang, B.; Alvin, M.A.; Lin, Y. Ultrasonic detection of delamination and material characterization of thermal barrier coatings. J. Therm. Spray Technol. 2012, 21, 1184–1194. [Google Scholar] [CrossRef]
- Eren, E.; Kurama, S.; Solodov, I. Characterization of porosity and defect imaging in ceramic tile using ultrasonic inspections. Ceram. Int. 2012, 38, 2145–2151. [Google Scholar] [CrossRef]
- Chen, B.; Li, W.; Qing, X. Damage detection of thermal barrier coating by ultrasonic guided wave. IOP Conf. Ser. Mater. Sci. Eng. 2019, 493, 1–9. [Google Scholar] [CrossRef]
- Chen, R.H.; Zhang, B.; Alvin, M.A. Ultrasonic detection of delamination and material characterization of thermal barrier coatings. Turbo Expo Power Land Sea Air 2009, 48852, 925–932. [Google Scholar] [CrossRef]
- Lin, L.; Zhao, Y.; Chen, J.; Li, X.; Lei, M. Ultrasonic characterization of eb-pvd thermal barrier coatings irradiated by hipib. Key Eng. Mater. 2008, 373, 358–362. [Google Scholar] [CrossRef]
- Ding, Y.; Ye, X.-W.; Guo, Y.; Zhang, R.; Ma, Z. Probabilistic method for wind speed prediction and statistics distribution inference based on SHM data-driven. Probab. Eng. Mech. 2023, 73, 1–9. [Google Scholar] [CrossRef]
- Ding, Y.; Ye, X.-W.; Guo, Y. Copula-based JPDF of wind speed, wind direction, wind angle, and temperature with SHM data. Probab. Eng. Mech. 2023, 73, 1–10. [Google Scholar] [CrossRef]
- Ding, Y.; Ye, X.-W.; Su, Y.-H.; Zheng, X.-L. A framework of cable wire failure mode deduction based on Bayesian network. Structures 2023, 57, 1–11. [Google Scholar] [CrossRef]
- Ding, Y.; Ye, X.-W.; Guo, Y. Wind load assessment with the JPDF of wind speed and direction based on SHM data. Structures 2023, 47, 2074–2080. [Google Scholar] [CrossRef]
- MAPOD. Available online: http://www.cnde.iastate.edu/mapod/ (accessed on 7 July 2022).
- Annis, C. MIL-HDBK-1823A, Nondestructive Evaluation System Reliability Assessment; Department of Defense Handbook, Wright-Patterson AFB: Greene County, OH, USA, 2009; Volume 1, pp. 1–171. [Google Scholar]
- Gandossi, L.; Annis, C. Probability of Detection Curves: Statistical Best-Practices; ENIQ Report No 41; EUR 24429 EN; European Commission Joint Research Centre Institute for Energy: Petten, The Netherlands, 2010; Volume 1, pp. 1–72. [Google Scholar]
- Subair, S.M.; Balasubramaniam, K.; Rajagopal, P.; Kumar, A.; Rao, B.P.; Jayakumar, T. Finite element simulations to predict probability of detection (pod) curves for ultrasonic inspection of nuclear components. Procedia Eng. 2014, 86, 461–468. [Google Scholar] [CrossRef]
- Ali, M.S.S.A.; Kumar, A.; Rao, P.B.; Tammana, J.; Balasubramaniam, K.; Rajagopal, P. Bayesian synthesis for simulation-based generation of probability of detection (pod) curves. Ultrasonics 2018, 84, 210–222. [Google Scholar]
- Subair, S.M.; Agrawal, S.; Balasubramaniam, K.; Rajagopal, P.; Kumar, A.; Rao, P.B.; Tamanna, J. On a framework for generating pod curves assisted by numerical simulations. AIP Conf. Proc. 2015, 1650, 1907–1914. [Google Scholar]



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density | Young’s Modulus [GPa] | Poisson’s Ration |
|---|---|---|---|
| Gold−Silver (Ag-Si) | 12,000–15,000 | 90 | 0.286 |
| Yttria (Y2O3) | 5010 | 174 | 0.308 |
| Alumina (Al2O3) | 3600 | 403 | 0.232 |
| [%] | E [GPa] | G [GPa] | Diff E [%] | Diff G [%] |
|---|---|---|---|---|
| 0 | 90 | 35 | - | - |
| 1.59 | 87.77 | 34.13 | 2.48 | 0.97 |
| 3.17 | 74.45 | 28.95 | 17.28 | 6.73 |
| 6.35 | 61.98 | 24.1 | 31.14 | 12.12 |
| 9.52 | 47.77 | 18.57 | 46.92 | 18.25 |
| [%] | E [GPa] | G [GPa] | Diff E [%] | Diff G [%] |
|---|---|---|---|---|
| 0 | 174 | 66.5 | - | - |
| 1.6 | 164.34 | 62.82 | 5.55 | 2.11 |
| 3.2 | 153.96 | 58.85 | 11.52 | 4.4 |
| 4.8 | 141.1 | 53.93 | 18.91 | 7.22 |
| 6.4 | 130.46 | 49.87 | 25.02 | 9.56 |
| [%] | E [GPa] | G [GPa] | Diff E [%] | Diff G [%] |
|---|---|---|---|---|
| 0 | 403 | 163.5 | - | - |
| 1.06 | 397.85 | 161.47 | 1.28 | 0.51 |
| 2.12 | 383.7 | 155.72 | 4.79 | 1.93 |
| 3.17 | 367.83 | 149.28 | 8.73 | 3.53 |
| 4.23 | 347.63 | 141.09 | 13.74 | 5.56 |
| Signal | Crack Signal Amplitude [m] | Back-Wall Signal Amplitude [m] |
|---|---|---|
| Black color | 10 | 10 |
| Green color | 10 | 10 |
| Purple color | 10 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marrazzo, M.; Sharif Khodaei, Z.; Aliabadi, M.H.F. Laplace Domain Boundary Element Method for Structural Health Monitoring of Poly-Crystalline Materials at Micro-Scale. Appl. Sci. 2023, 13, 13138. https://doi.org/10.3390/app132413138
Marrazzo M, Sharif Khodaei Z, Aliabadi MHF. Laplace Domain Boundary Element Method for Structural Health Monitoring of Poly-Crystalline Materials at Micro-Scale. Applied Sciences. 2023; 13(24):13138. https://doi.org/10.3390/app132413138
Chicago/Turabian StyleMarrazzo, Massimiliano, Zahra Sharif Khodaei, and M. H. Ferri Aliabadi. 2023. "Laplace Domain Boundary Element Method for Structural Health Monitoring of Poly-Crystalline Materials at Micro-Scale" Applied Sciences 13, no. 24: 13138. https://doi.org/10.3390/app132413138
APA StyleMarrazzo, M., Sharif Khodaei, Z., & Aliabadi, M. H. F. (2023). Laplace Domain Boundary Element Method for Structural Health Monitoring of Poly-Crystalline Materials at Micro-Scale. Applied Sciences, 13(24), 13138. https://doi.org/10.3390/app132413138