3. Mathematical Modelling, Theoretical Aspects
3.1. Modelling Assumptions
In this study the following assumptions have been made: the material, of which the column is made, is linearly elastic; the hypothesis of small displacements and deformations; the axial force Q is constant and is computed through a first-order analysis;
force Q is not influenced by the bending moments, it is a conservative force, which remains unchanged during bending; for the analysis the Euler-Bernoulli beam model is used, which does not take into account shear deformation and rotational bending effects as the Timoshenko-Ehrenfest beam theory; stiffness matrix assembling process neglects axial deformations; the beam-type elements are not subjected to lateral load, external loads are applied only in the joints; the column ax is perfectly straight, there are not taken into account any initial imperfections; no local buckling at any cross-section along the column length is allowed.
3.2. General Aspects
A major issue in the design of beam-type elements with significant axial loads is to improve the stability of the element and avoid their failure through buckling, which phenomenon threatens the structural integrity of the whole structural assembly. The phenomenon is more relevant in the case of statically determined structural assemblies.
The first step in the modelling of beam-type elements to improve their stability is to analyze Euler’s critical load derived in 1757, which is presented in Expression (1) [
6].
In Expression (1) E represents Young’s modulus, denotes the minimum value of the moment of inertia of the cross-section, and represents the buckling length of the beam-type element subjected to compression forces, with respect to the imposed kinematic constraints to the joints.
Euler’s formula highlights two important aspects unaware of the kinematic restrains of the joints, the length of the element and the moment of inertia of the cross-section. The factor of direct proportionality with the critical load is the moment of inertia. This design parameter gain importance when the buckling modes are studied. The deflection shape associated with the primary buckling mode emphasizes potential critical areas of the element, which by similarity, can be scribed as potential areas of appearance of plastic hinges. In this manner it is required to amplify the value of the moment of inertia, therefore a variable cross-section beam-type element is obtained. In order to avoid sudden changes of the elements cross-section, which can be identified as stress concentration points, it is proposed the modelling of the cross-section of the element through a continuous function.
Modelling the cross-section of the element is performed with respect to Cavalieri’s principle. According to Cavalieri’s principle, the cross-section area of every section will remain unchanged during the modelling process, but the moment of inertia will change in accordance with the primary buckling mode. As a consequence of the mentioned principle, the elastic resistance of every cross-section is identical. Modelling a beam-type element with a variable cross-section follows the increase of the critical elastic buckling load, in an ideal case exceeding the elastic resistance of the cross-section, thus the buckling phenomenon can be avoided.
3.3. Modelling of the Moment Inertia
Modelling the moment of inertia of the cross-section presumes to assume a variation law. The variation law can be formed through interpolation functions between reference values in form of piecewise, multilinear, or polynomial functions. For the first two types of function, results are satisfying, although in the points where the function is not continuous the iterative process may be divergent, and the precision decreases by two orders of magnitudes. In the particular case of polynomial functions, the passing through the critical values is continuous, and the desired precision is in close correlation with the polynomial function degree.
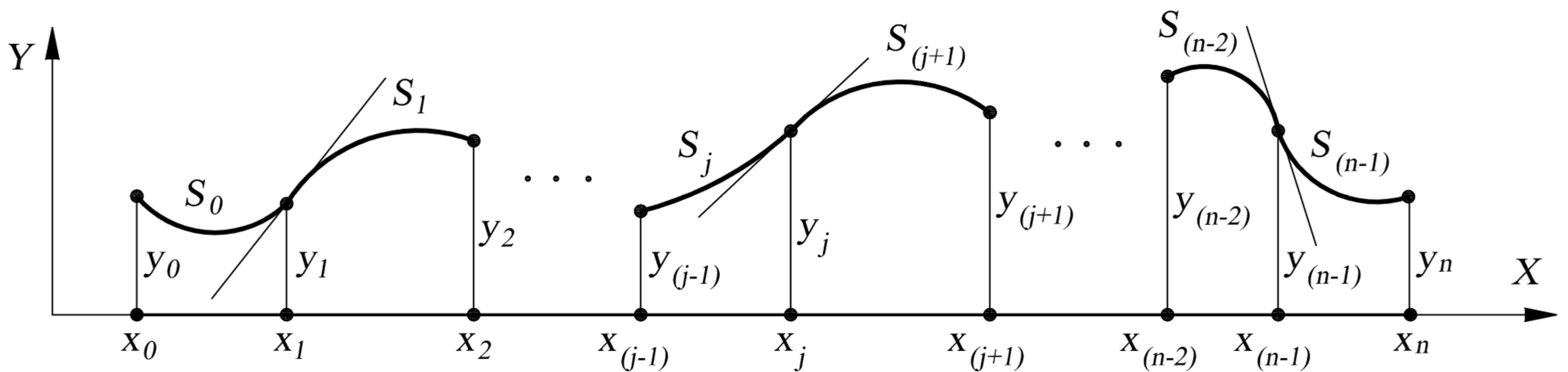
The modelling of the moment of inertia in this study regardless of the kinematic constraints of the joints is performed with cubic functions, a piecewise polynomial formula known as the spline function. The natural boundary conditions are shown in
Figure 1. Be
f a function defined on
which is interpolated in
m + 1 nodes on
n sub-intervals through a cubic interpolant
S(
x) defined in
Figure 1.
Cubic interpolant
S(
x), is a cubic polynomial piecewise function expressed in a general form as in Expression (2) [
21].
In Expression (2),
is defined on sub-interval
. The boundary conditions for every sub-interval
are presented in Relations (3a)–(3c).
The degree of the cubic interpolant
is 3,
, and the general expression for
is presented in Expression (4) [
21].
According to Expression (4), it is required to fix the values for coefficient
, , and
, with respect to the boundary conditions expressed in Relation (3a)–(3c). One of the cubic interpolant’s properties is to minimize the definite integral, presented in Expression (5), for every
g function defined on an interval
, which approximates function
f through nods
[
21].
One can introduce notation
, with respect to the general form presented in Expression (4), thus the boundary conditions from Relation (3a)–(3c) can be defined as recursive sequences, presented in Relation (6a)–(6c) [
21].
The numerical value of coefficient
results from the function evaluation of
f at the input value of
, denoted with
, as for
results from the function evaluation of
f at the input value of
, denoted with
. For the recursive sequences from Relations (6a)–(6c) it is required the cubic interpolants coefficients as expressions which depends only on two specific arguments, thus coefficients
and
are chosen. Coefficient
, can be expressed from Relation (6c), presented in Expression (7) [
21].
Substituting Expression (7) in the recursive Sequence (6a,b), Expression (8a,b) can be expressed [
21].
Substituting Expression (8a) in Expression (8b) it is possible to express coefficient
with arguments
and
, as in Expression (9) [
21].
The recursive Sequences (8b) and (9) can be expressed also for sub-interval
, therefor Expression (8b) can be written as in Equation (10) [
21].
Equation (10) represents
m − 1 equations, and in order to solve a linear system of equations, two additional relations are required in the form of the natural boundary conditions expressed in Relation (11) [
21].
Therefor the linear sytem of equations, whit respect to Equation (10) and Condition (11a,b), can be expressed as a matrix-vector Equation (12) [
21].
In Equation (12),
is the (
m + 1) × (
m + 1) coefficient matrix of the system whose implicit from is presented in Expression (13),
is a vector made up of the
m + 1 unknowns, presented in Expression (14a), and
is the vector made up of the
m + 1 right-hand sides of the equations, presented in Expression (14b).
Therefore, the solution of System (12) specifies the numerical values for coefficient
. The cubic interpolant’s coefficients defined on n sub-intervals, are presented in Expressions (15a)–(15c) [
21].
3.4. Stiffness Matrix Definition for Beam-Type Element with Elastic Restrains
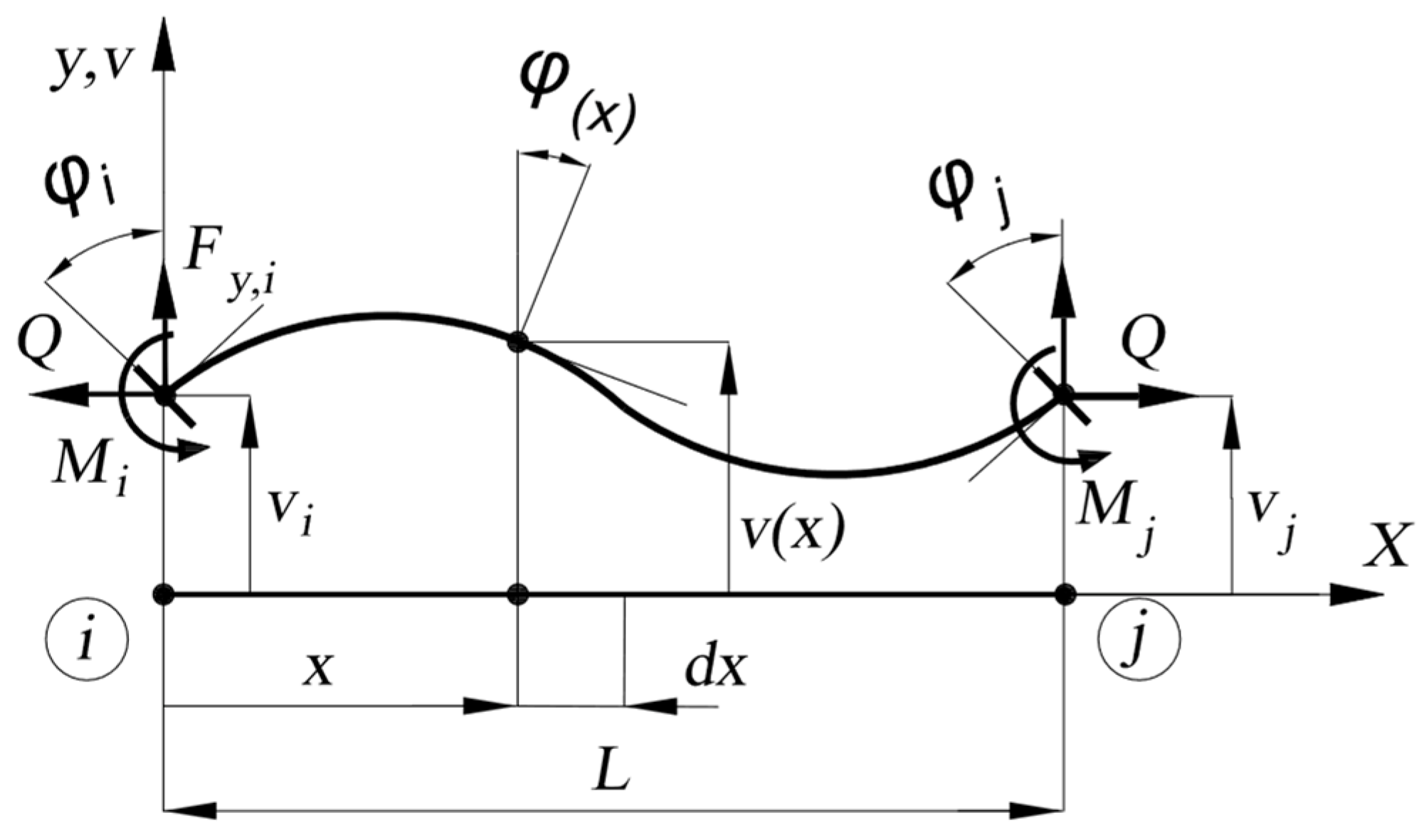
The characterization of a structure or of an element from a structure, presented in
Figure 2, through the geometric aspect, refers to the establishment of the deformed shape and defining the parameters which can define that specific deformed shape. The geometric characterization of structural elements highlights the fact that the deformed shape can be defined if the displacement field is known, displacements which can be translations or rotations. As a consequence of the geometric aspect, it is possible to choose the displacements as independent parameters to describe the elastic equilibrium state.
The matrix-based formulation of the stability problem assumes the definition of the displacement field, which represents a function approximation problem. The task is to find a function that closely matches the displacement field. In the case of a bi-dimensional stability problem, for the beam-type element presented in
Figure 2, the approximation problem assumes the approximation of the displacement field through a polynomial function of degree
n − 1, presented in Expression (16).
In Expression (16), is the polynomial function which describes the displacement field, n − 1 = deg(v(x)) is the degree of , is a vector with the terms of the polynomial function divided by the terms’ coefficient; a vector with the polynomial functions coefficient. For joints and of the beam-type element, the kinematic boundary conditions can be written as in Relation (17).
The accuracy of the approximation of the displacement field depends on the degree of the chosen polynomial function. Therefore beside the 4 nodal parameters,
there are introduced
n − 4 non-nodal parameters
. Consequently, the nodal displacement and force vectors for the beam-type element in
Figure 2, are presented in Expressions (18) and (19) [
22].
Expression (18) highlights the nodal and non-nodal parameters. Based on Expressions (18) and (19) the limit displacement boundary conditions are expressed in Equation (20).
The linear system of Equations presented in (20), is figured as a matrix equation in Equation (21).
In Equation (21), the matrix
represents the coefficient matrix of the limit displacement boundary condition system. By expressing the vector of the polynomial function coefficients and by introducing it in Expression (16), the interpolation function matrix
can be defined, as in Expression (22) and the polynomial function which describes the displacement field can be defined as in Expression (23).
In Expression (23),
represents the nodal interpolation function matrix, which links the displacements of the beam-type element with the nodal displacements,
is the vector of nodal and non-nodal displacements. Given Expression (23),
Figure 3 is highlights the significance of non-nodal parameters/displacements through 4 interpolation functions of a degree
n − 1 = 9 polynomial function.
Given Expression (23) and the geometric meaning of the differential relations between displacements, presented in
Figure 4, the slope of the deflected beam axis
, expressed in Expression (24), the strain
, expressed in Expression (25), and the reaction forces induced in the beam-type element
, expressed in Expression (26), can be defined as a function of nodal and non-nodal displacements
.
In Expression (24),
represents a matrix that links the slope of the deflected beam axis
with the nodal and non-nodal displacement vector
.
In Expression (25),
represents the strain displacement matrix, which can define the curvature
depending on the nodal and non-nodal displacements
.
Expression (26) is based on the validity of Hooke’s law and the hypothesis of small displacements and deformations.
For the beam-type element, presented in
Figure 2, the equilibrium is expressed through the principle of virtual work. According to the mentioned principle, the virtual displacements or the virtual forces are infinitesimal and consistent with the physical and elastic constraints of the beam-type element. Therefore for virtual displacements and the virtual forces, the same relations can be expressed as for the real displacements and forces, presented in Expression (27).
In Expression (27),
is a vector of the nodal and non-nodal virtual displacements. The mathematical expression of the principle of virtual work is presented in Relation (28) [
22].
In Relation (28),
denotes the virtual mechanical work of the external forces, and
represents the virtual mechanical work of the internal efforts. The mathematical expression of the virtual mechanical work of the external forces is presented in Expression (29).
In Expression (29),
represents the virtual mechanical work of the external forces applied at the joints,
denoted the virtual mechanical work of the axial force
Q, presented in
Figure 4. The virtual mechanical work of the external forces applied at the joints,
can be expressed depending on the virtual nodal and non-nodal displacements, presented in Expression (30).
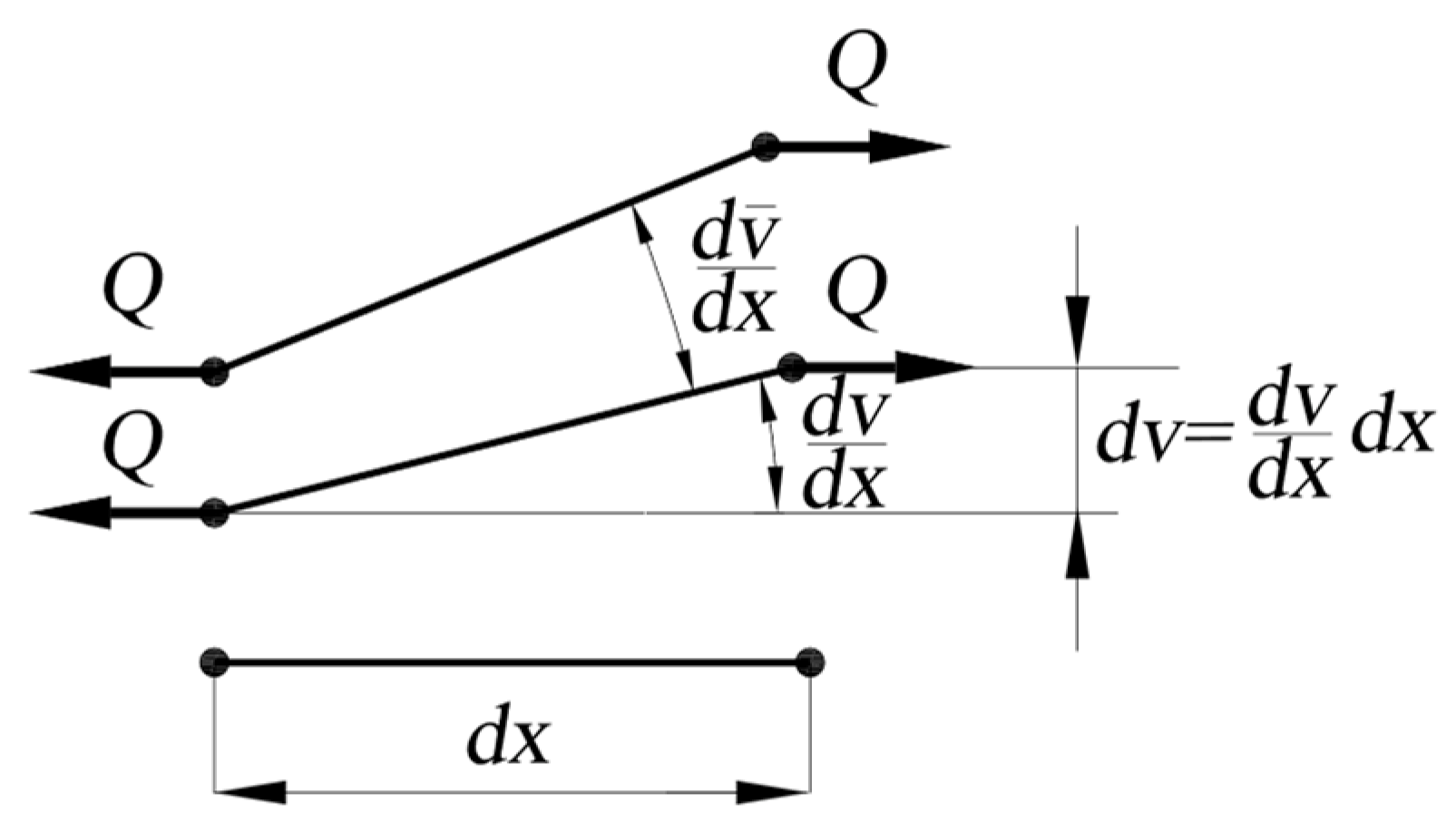
The virtual mechanical work of the axial force
Q, in the case of an infinitesimal beam-type element of length
dx, presented in
Figure 4, is defined in Expression (31).
In Expression (31), the elementary virtual mechanical work of the axial force
Q, can be expressed as in Expression (32).
By substituting Expression (32) in Expression (31) one can obtain the expression of the virtual mechanical work of the axial force
Q, as a function of the nodal and non-nodal displacements, which is shown in Expression (33).
In Expression (33),
represents the geometric stiffness matrix, which depends on the geometric characteristics of the beam-type element. The mathematical expression of the virtual mechanical work of the internal efforts is presented in Expression (34).
In Expression (34),
represents the virtual mechanical work of the internal efforts, which is expressed in Expression (35), and
represents the virtual mechanical work of the reaction forces of the support connections, presented in Expression (36).
In Expression (35),
represents the material stiffness matrix of the beam-type element.
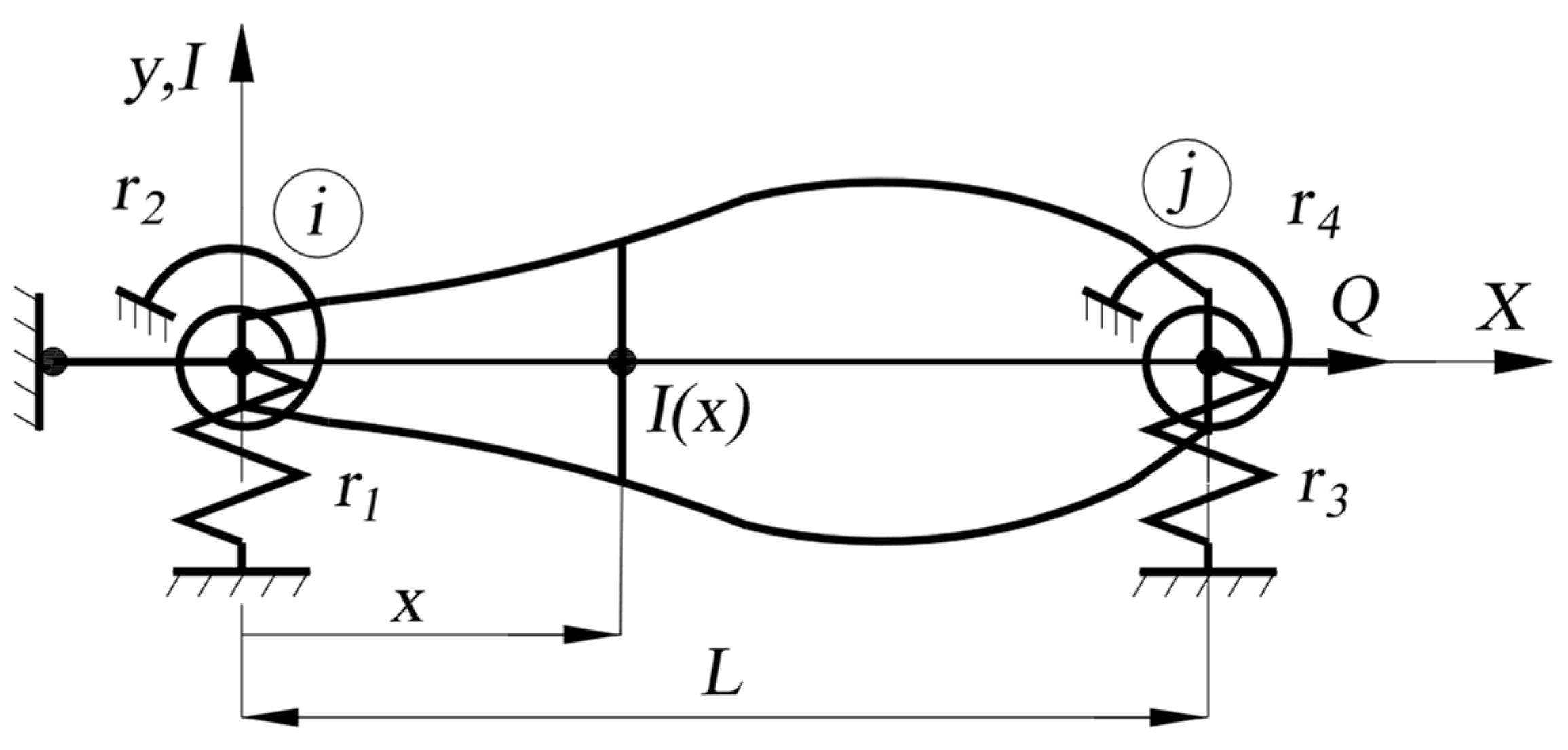
In Expression (36),
denotes the value of the stiffness of the elastic support connections with respect to the kinematic boundary conditions, presented in
Figure 5.
Expressions (35) and (36) are quadratic forms with nodal and non-nodal displacements as variables, therefor the stiffness coefficients can be obtained by the algebraic sum of the quadratic form’s coefficents, with respect to the connection indexes. Based on Expressions (35) and (36) the virtual mechanical work of the internal efforts can be written as in Expression (37).
With regard to Relationships (35) and (36), the procedure for assembling the material stiffness matrix, Expression (35) can be written as in Expression (37).
In Expression (37),
denotes the assembled material stiffness matrix. Based on Relation (28) and Expression (29) Equation (38) can be expressed.
Equation (39) can be obtained by substituting Expresions (30), (33), and (37) in Equation (38).
Equation (39) must be fulfilled for every virtual displacement
, therefore Equation (40) can be written.
A compact form of Equation (40) is presented in Equation (41).
In Equation (41), represents the elastic stiffness matrix of a beam-type element.
3.5. Formulation of the Stability Analysis
Based on Equation (41), internal forces
, can be obtained with respect to the nodal and non-nodal displacements
and the axial force
Q. By expressing the nodal and non-nodal displacement vector from Equation (41), Expression (42) is obtained [
23].
In Expression (42),
represents the adjunct matrix of the elastic stiffness matrix, whose diagonal entries are the determinant of the elastic stiffness matrix
. Based on Expression (42), the failure of a beam-type element occurs when there is an infinitesimal increase in the axial force
the displacements tend to infinity. Therefore, in the case of beam-type elements, the loss of stability occurs when Equation (43) is satisfied, called an eigenvalue problem [
23].
Equation (43), denotes the characteristic equation of the eigenvalue problem, which leads to a homogeneous system of equations, presented in Equation (44) [
23].
The solution of the eigenvalue problem and of Equation (44), represents vector with the proper eigenvalues and the corresponding eigenvectors in a matrix . The minimum value of represents which denotes the critical buckling load, and the corresponding eigenvector the deflection shape.
3.6. Indirect Variational Method for the Study of the Conditions and Nature of Equilibrium
The potential energy is defined as a function of a function, that is,
, a functional presented in Expression (45). The problem consists of determining the condition of the minimum functional
of one function
v of one variable
x [
20].
In Expression (45),
v(
x) is presumed to be continuous, with continuous first four derivates and also appropriate boundary conditions. The mathematical form of the total potential energy is presented in Expression (46) [
23].
In Expression (46),
U denotes the strain energy,
V represents the potential of the external forces or the mechanical work of external force applied in joints. In this study,
U is defined in Expression (47) through two energetic quantities.
It is assumed that the equilibrium position corresponds to an extreme value of the total potential energy, a condition presented in Equation (48) [
23].
Equation (48) represents the condition for the Euler equation, with the proper boundary conditions. In mechanics, Equation (48) is generally equivalent to the equilibrium condition [
23]. For the study of the nature of equilibrium, there are considered two stages of deformation, for the intensity
λ of the axial force: stage 1, which is defined by displacements
and total potential energy
(
,
λ); stage 2, which corresponds to displacements
) + and total potential energy
( +).
The variation of the total potential energy by passing from stage 1 to stage 2 can be expressed in Expression (49) [
23].
In Expression (49),
is a continuous n-time differentiable function defined on the interval [
0 L], which is expanded into a Taylor series, presented in Expression (50) [
20].
In Expression (50),
set the first-order derivative of the total potential energy,
denotes the second-order derivative of the total potential energy and
represents the higher-order derivative of the total potential energy, terms which are neglected in the modelling process [
23].
The beam-type element in this study has a single degree of freedom
v(
x), which defines the system’s state. The terms obtained after the expansion into a Taylor series of
, are presented in Expressions (51a)–(51c) [
20].
With respect to the condition of equilibrium, presented in Equation (48), and to the fact that the potential of the external forces, for the case of constant loads, is expressed as
, where
represents a force associated with displacement
, which is a linear displacement function, whose high-order derivative is canceled, the variation of the total potential energy between stage 1 and 2 is equivalent to the second-order derivative of the strain energy, presented in Expression (52) [
20].
Expression (52) allows the study of the nature of equilibrium, as presented in
Table 1.
In the case of neutral equilibrium, it is necessary to determine and study the higher-order derivative of the total potential energy according to Expression (50). The nature of equilibrium is indicated by the fourth-order derivative of the total potential energy, which has to be positive-definite, positive definiteness of
guarantees stability [
20].
Based on the first theorem of Castigliano the second-order derivative of the total potential energy with respect to the displacements represents the stiffness coefficient
, which indicates a force at
i due to unit displacement at
j. According to this remark, Expression (52) can be expressed as in Expression (53) [
23].
Expression (53) is a quadratic from in displacements, which in a matrix form is presented in Expression (54).
In Expression (54),
is the displacement vector,
is the elastic stiffness matrix of the studied structural element. Based on the condition that the variation of the total potential energy at the limit equilibrium state must be zero, respectively
is obtained through the assembly of the material stiffness matrix and the geometric stiffness matrix, the equation of stability can be determined by an energetic method, which assumes an eigenvalue problem [
23].
Continuous structures are analyzed through an indirect variational method, in which the structure is not discretized. The differential equations are obtained from the minimizing condition for the potential energy [
20]. In contrast to this approach, the stability analysis, in which the structure is discrete or discretized and the expression of the second variation of potential energy is reduced to a quadratic form, is the direct variational approach [
20].
3.7. Positive Definiteness of
The positive definiteness of
guarantees stability. The total potential energy is quadratic from in displacements, and the elastic stiffness matrix [
K] determines the quadratic form. Matrix [
K] is a real symmetric matrix, which is positive-definite if and only if the eigenvalues of matrix [
K] are positive [
20].
The elastic stiffness matrix [
K] is a real, Hermitian matrix and, according to Sylvester’s criterion, the necessary and sufficient condition for the quadratic from
to be positive-definite if the leading principle minors are positive, meaning
, where n represents the dimension of the real vector space of the elastic stiffness matrix,
[
24].
3.8. Boundary Conditions
According to the Lagrange-Dirichlet theorem, the equilibrium is stable if the total potential energy admits a local minimum. The condition that the potential energy must be strict minimum determines the differential equation which describes the problem and the admissible forms of the boundary conditions. The kinematic boundary conditions in mechanics or the essential boundary conditions in mathematics can be expressed in Relation (55) [
20].
Equation (56a,b) can be used to express static boundary conditions in mechanics or natural boundary conditions in mathematics [
20].
The approximate deflection shape
v(x), or trial function, must always satisfy all the kinetic boundary conditions but does not have to satisfy the static boundary conditions. The static boundary conditions and the differential conditions of equilibrium are a result of the minimization of
itself. If the static boundary conditions are satisfied,
v(
x) approximates the exact buckling shape, and the resulting critical load
approximates
more accurantely [
20].
3.9. Rayleigh Quotient
The strain energy is a quadratic form in displacements and the neutral equilibrium state assumes that the second-order variation of the total potential energy is zero, conditions presented through a mathematical from in Equation (57) [
16].
Based on Equation (48) and Expression (23), Equation (57) can be expressed as in Equation (58).
In Equation (58)
represents the axial force multiplicator, which is expressed in Expression (59).
Expression (59) represents the Rayleigh quotient, which approximates the axial force, value dependent on the displacement field
v(
x). In order to fix the value of
RQ, an iterative process must be launched which has as its starting value a certain displacement vector, a vector which readjusts after every iteration, with local convergence conditions. The defection shape at the moment of loss of equilibrium is not known, therefore the presented method is an approximative one [
20].
According to the Lagrange-Dirichlet condition, the equilibrium is stable if P for every displacement v(x) compatible with the system’s kinematic constrains. At the limit state, the moment before the loss of stability, the critical buckling force represents , where it defines the number of iterations.
In Expression (59), the numerator represents the mechanical work of the internal efforts
and the denominator the unitary mechanical work of the axial force, in this case,
RQ,
. Expression (59) for a beam-type element can be expressed as in Expression (60) [
16].
In Expression (60), the Rayleigh quotient is defined as an analytic expression concerning the displacement field
v(
x), and function
I(
x) is a continuous function that describes the modification of the moment of inertia of the beam-type element [
20].
3.10. Timoshenko Quotient
In the case of statically determined structures with the Timoshenko quotient, one may obtain a better approximation of the critical buckling load. The method assumes the appraisal of the strain energy on the basis of the bending moment
M, which appears in the beam-type element due to deformation. The value of the bending moment is approximated with the product
, instead of the curvature, which assumes an approximative displacement field [
20].
In the case of a structure with linear elastic behavior, the strain energy is a quadratic form, and if
it corresponds to the equilibrium position, then the modification of the total potential energy at the limit of equilibrium coincides with the potential energy. The modification of the total potential energy at the critical state must be equal to zero, a condition which can be expressed as in Equation (61) [
20].
By expressing the axial force
Q from Equation (61), Expression (62) is obtained [
20].
The major advantage of the Timoshenko quotient is that it is a stationary value, a more precise value than the Rayleigh quotient.
4. Work Method
4.1. General Aspects
In this study, it is assumed that the beam-type element is part of a new structural assembly or part of a structure that requires structural rehabilitation. In the case of a new structure, a main structural design criterion is to use a minimum number of elements and a minimum amount of material. Therefore, the design or modelling of the beam-type element assumes an iterative process of optimization, through which the main goal is to fix the geometric characteristics of a beam-type element, of length L, subjected to axial force, with different kinematic constraints at the joints. In this study loads are applied only at the joints, therefore the state of strain is easier to control. The final failure criteria is a failure due to excessive stresses rather than buckling.
The modelling process assumes three interconnected iterative cycles, presented in
Figure 6, which assumes obtaining a geometric configuration for the beam-type element which is not sensible to buckling.
The first iterative cycle has the purpose of fixing the maximum critical buckling load which can be achieved for a beam-type element with length L, by defining a variation function for the moment of inertia. To define the variation function of the moment of inertia, five coefficients are introduced which are associated with five equidistant points on the element, which indicate the variation of the moment of inertia as against the reference cross-section. The reference cross-section’s geometric and inertial characteristics are computed based on the imposed failure condition. At these points, the quantity of material is not modified, only its distribution on the cross-section. Between these reference points, cubic interpolation is performed in order to obtain a continuous function to express the variation of the moment of inertia.
The second iterative cycle starts after fixing the values for the five coefficients, which describe the variation of the moment of inertia, and the geometric properties of the reference cross-section. In the case of the 5 critical sections, it is important that the class of the sections be less than 4, in order to avoid the local verification process as described in SREN 1993-1-6. The third iterative cycle assumes verifying the failure condition, which presumes comparing the critical buckling load with the design resistance of the cross-section for uniform compression.
By undergoing the presented three iterative cycles, it is possible, with respect to the modelling assumptions, to fix the geometric characteristics for the beam-type element, with length L and variable cross-section, in order to achieve a favorable failure condition and avoid the loss of stability of the element.
Figure 6.
Flow chart of the work method.
Figure 6.
Flow chart of the work method.
The abbreviations in
Figure 6 are related to a series of subprograms that incorporate the theoretical aspects from
Section 3, as follows.
The subprogram entitled
model_section_var sets the cubic interpolation function that describes the variation of the moment of inertia, as presented in
Section 3. The input arguments are the length of the element
L and the cross-section variation coefficients vector [
i1 i2 i3 i4 i5]. The output for this program is the symbolic function
Ii, which describes the modification of the moment of inertia.
The subprogram entitled sbc establishes the critical axial load, identified as the Rayleigh quotient, based on the variation of the cross-section, the material type, and the kinematic restraints imposed on the beam-type element. The input arguments are the length of the element L, the Young modulus E, the symbolic function Ii, and the stiffness vector for the joints. The outputs are the critical buckling force RQ and the deflection shape of the element through the displacement vector fp, which are the solution to the eigenvalue problem.
The subprogram entitled check_section is a verification program that calculates the geometric and inertial characteristics of the 5 critical sections and indicates if the class of the cross-section is greater than 3, based on the geometric characteristics of the reference cross-section. The input arguments are the cross-section variation coefficients vector, the outside diameter of the reference cross-section D0 and the thickness of the wall of the reference cross-section t0. The output of the program is a logical one. If the answer is TRUE then the variable cross-section beam-type element has no issues. When the answer is FALSE then modifications are required regarding the geometric entries of the reference cross-section or the variation coefficients of the moment of inertia.
The subprogram entitled failure_condition checks if the imposed failure condition is satisfied, regarding the failure due to the resistance of the cross-section for uniform compression rather than buckling. According to Hooke’s law, conditions can be expressed in terms of the area of the cross-section. The input arguments are the area of the reference cross-section A0, the steel-yield strength fy, and the critical buckling load RQ. The outputs are the elastic resistance of the cross-section Fc,Rd and the critical buckling load Fb,Rd.
4.2. Aspects Regarding the Input Data
4.2.1. Aspects Regarding the Length of the Beam-Type Element
The starting point of the modelling process is fixing the length of the beam-type element, L. The length of the element is a numerical value that remains constant during the iteration cycles and the kinematic constraints imposed on the joints.
In order to obtain a beam-type element with optimal shape from a topological point of view, the criteria regarding the variation of the cross-section are a necessary but not sufficient condition. The additional criteria are in close relation to Euler’s critical load, presented in Expression (1). In Expression (1), the second important factor which influences the critical buckling load is the length of the element, a numerical value that must be correlated with the geometric characteristics of the cross-section. Given the length of the element, a factor of inverse proportionality, there are three possible situations to note.
The possible situations are related to the effective geometric length of the element L and the critical length of the element , which is an ideal length for which the failure condition is fulfilled and the modelling of a variable cross-section makes sense.
In case I, the length of the element is less than the ideal length, or . In this case, the failure will occur by exceeding the value of the design resistance of the cross-section for uniform compression. The critical buckling force is net superior. In the present case, the modelling of a variable cross-section makes no sense, given the computational effort, the stiffness of the joints, and the technological terms. In this situation, the constant cross-section is an ideal solution.
In case II, the length of the element is quasi-equal to the ideal length, or . This case is considered the ideal case. The failure will occur by exceeding the value of the design resistance of the cross-section for uniform compression. The critical buckling force is superior. Modelling a variable cross-section is necessary in order to achieve a superior value for the critical buckling load beyond the design resistance of the cross-section for uniform compression.
In case III, the length of the element is greater than the ideal length, or . The failure will occur due to the loss of stability. The material is not used rationally.
For the cases for which the length of the element is a numerical value in the neighborhood of , there are several optimization methods, one of which is proposed in this study is to use a minimum quantity of material that has an optimum distribution on the cross-section.
4.2.2. Material Type and Section Profile
Slender structural elements subjected to a significant amount of compression forces appear to be characteristic of steel structural assemblies. In the case of steel structures, the beam-type elements are modeled according to the main stress in the cross-section. In the case of high axial forces, the most frequently used and recommended profiles are circular tubular profiles, with
s-planes of sectional symmetry, with the inertial properties are equal in every direction. Given the boundary conditions for the beam-type element, circular tubular profiles are not sensible to flexural buckling. The recommended steel circular tubular profiles are presented in EN10219 [
25]. In this study, these profiles will be considered as profiles for the reference cross-sections. The profile types presented in EN10219 are manufactured for constant cross-section elements. In this study, the reference cross-section id is presented in Expression (63), which indicates the geometric properties and material type for the cross-section.
In Expression (63) CHS is the abbreviation for the circular hole section, the type of profile chosen,
D represents the external diameter in [mm], t the thickness of the profile’s wall in [mm],
L represents the length of the beam-type element in [mm], S355JO is the grade of the steel, which carries a minimum yield strength of 355 [N/mm
2], JO indicates that the steel has undergone longitudinal Charpy V-Notch impact testing at 27[J] at 0 [°C], EN10219 is the reference standard for the profile type [
25].
4.2.3. The Stiffness of the Support Connections
In a theoretical study for the hindered displacements in a support connection, infinite value is associated with the stiffness of the connection. In the MATLAB programming language, the concept of infinity is associated with a numerical value of 10
1000 [
26]. To quantify the effects of real support connections which allow small displacements there are imposed finite numerical values for the stiffnesses of the hindered displacements. In the case of other not constrained connections, their stiffness is not zero.
In this study, the numerical values imposed on the stiffnesses of the support connections are purely theoretical and they do not result from measurements on a physical model. In the theoretical model, the support connections are considered absolutely rigid or absolutely flexible. For any intermediate values of the rigidity of the elastic support, a flexible joint is obtained [
6]. The modelling of elastic support connections resumes fixing the value of the stiffness for every connection type. The numerical values are computed based on the stiffness properties of the cross-section at the joints for the beam-type elements. For example, in the case of a beam-type element that is clamped-clamped the expression for the support connection stiffnesses, if one considers only the effect of bending, is presented in Expression (64) [
27].
In Expression (64),
E represents Young’s modulus,
L represents the length of the element,
denotes the moment of inertia at the joint cross-section. In Expression (64) for the first joint, it corresponds to the first and second values, the stiffness for a hindered transversal displacement and a hindered rotation of the joint, and for the second joint corresponds to the third and fourth value, the stiffness for a hindered transversal displacement and a hindered rotation of the joint. For every beam-type element, it is possible to fix a reference cross-section, which is considered the geometric invariant of the iterative process [
27].
4.2.4. Aspects Regarding the Variation of the Cross-Section
The cubic interpolant describes the variation of the cross-section of the element on m sub-intervals. It is necessary to fix the values for the interpolation function at the limit of the sub-intervals, meaning m + 1 numerical values, indicated through coefficients . Due to rational considerations, the maximum modification for the moment of inertia of the cross-section is 100 [%] concerning the reference cross-section. The final values for the coefficients are fixed at the end of the iterative process. The modification of the moment of inertia assumes the modification of the outside diameter of the cross-section and the wall thickness of the cross-section .
In this study, the interpolation function, which describes the variation of the moment of inertia, is modeled on 4 sub-intervals. Therefore it is necessary to fix the value at five reference points, according to Expression (65).
4.3. Aspects Regarding Subprogram Check_Section
The potential points where it is recommended to modify the value of the moment of inertia are indicated by the defection shape of the compressed element. At the limits of
m + 1 sub-intervals, the values of the moment of inertia get local maximum values. Subprogram
Check_section determines the outside diameter of the cross-section
and the wall thickness of the cross-section
as a function of the reference cross-section. At the limit of a sub-interval,
m Expression (66) can be written.
In Expression (66), denotes the numerical value of the reference cross-section, which is fixed for the constant cross-section beam-type element according to the imposed failure condition. The numerical value of parameter i is correlated with the amplitude of the deflection shape with respect to the kinematic boundary conditions.
Modelling the cross-section is based on Cavalieri’s principle. The area of the cross-section is equal for every cross-section, presented in Relation (67).
In Relation (67),
represents the area of the reference cross-section, and it is highlighted the proposed modelling principle of the redistribution of material in the cross-section, highlighted also in
Figure 7. The numerical value for every cross-section is fixed for the constant cross-section beam-type element according to the imposed failure condition.
In
Figure 7 it is shown that a longitudinal and transversal cross-section of a variable cross-section beam-type element. Cross-section 1-1 corresponds to a section at the first joint, and cross-section 2-2 represents a current cross-section where a considerable modification of the moment of inertia is recorded. For cross-section 1-1 and cross-section 2-2 one may define the geometric and inertial characteristics presented in Expression (68a)–(68d).
In Expression (67),
represents the area of the cross-section;
denotes the moment of inertia of the cross-section;
represents the outside diameter and
represents the inside diameter of the cross-section, for
. By substituting Expressions (68a)–(68d) into Expression (67) the system of Equations (69) is obtained, which can be expressed as in Equation (70) due to a computational artifice.
By substituting Equation (2) in Equation (1) from the system (70) and with Equation (2) from the System (71), is obtained.
If Equation (1) is gathered with Equation (2), from the system (71), than Equation (72) can be written, from which the outside diameter of cross-section 2-2 can be obtained as a function of the geometric characteristics of cross-section 1-1, concerning the modification of the moment of inertia, presented in Expression (73).
If Equation (2) is subtracted from Equation (1), from the system (71), Equation (74) can be written, from which the inside diameter of cross-section 2-2 can be obtained as a function of the geometric characteristics of cross-section 1-1, concerning the modification of the moment of inertia, presented in Expression (75).
If a ratio,
p, is accepted between the outside and inside diameter of the cross-section for cross-section 1-1 Relation (76) can be written.
It is admitted the same ratio,
p, between the outside and inside diameter of the cross-section for corss-section 1-1 Relation (77) can be written.
Expressions (78) and (79) are obtained by squaring Relation (76) and substituting the outside diameter for cross-section 1-1 in Expressions (73) and (75).
If Relation (77) is squared and Expressions (78) and (79) are substituted, Equation (80) is obtained.
The solution to Equation (80), with respect
, highlights that the assumed ratio for both of the cross-sections is valid if the beam-type element has a constant cross-section. According to the reductio ad absurdum principlee, it is not possible to associate the same ratio for both of the cross-sections, therefore Relations (81) and (82) are written.
At this phase, the task is to determine ratio
p2 as a function of ratio
p1. Therefore by dividing Expression (78) with Expression (79) and based on Relation (82) the expression of ratio
p2 can be expressed as in Expression (83).
To be able to control the modified cross-sections, the thickness of the profile wall of cross-section 2-2 is expressed as a function of the thickness of the profile wall of cross-section 1-1. Cross-section 1-1′s thickness of the profile wall can be expressed as in Equation (84).
From Equation (84) the inside diameter of secion 1–1,
, can be expressed, which is introduced in Expressions (78) and (79) one may obtain Expressions (85) and (86).
If Expression (86) is substracted from Expression (85) the expression for the thickness of the profile’s wall for cross-section 2-2 is obtained, as a function of the thickness of cross-section 1-1′s profile wall and ratio p
1, as in Expression (87).
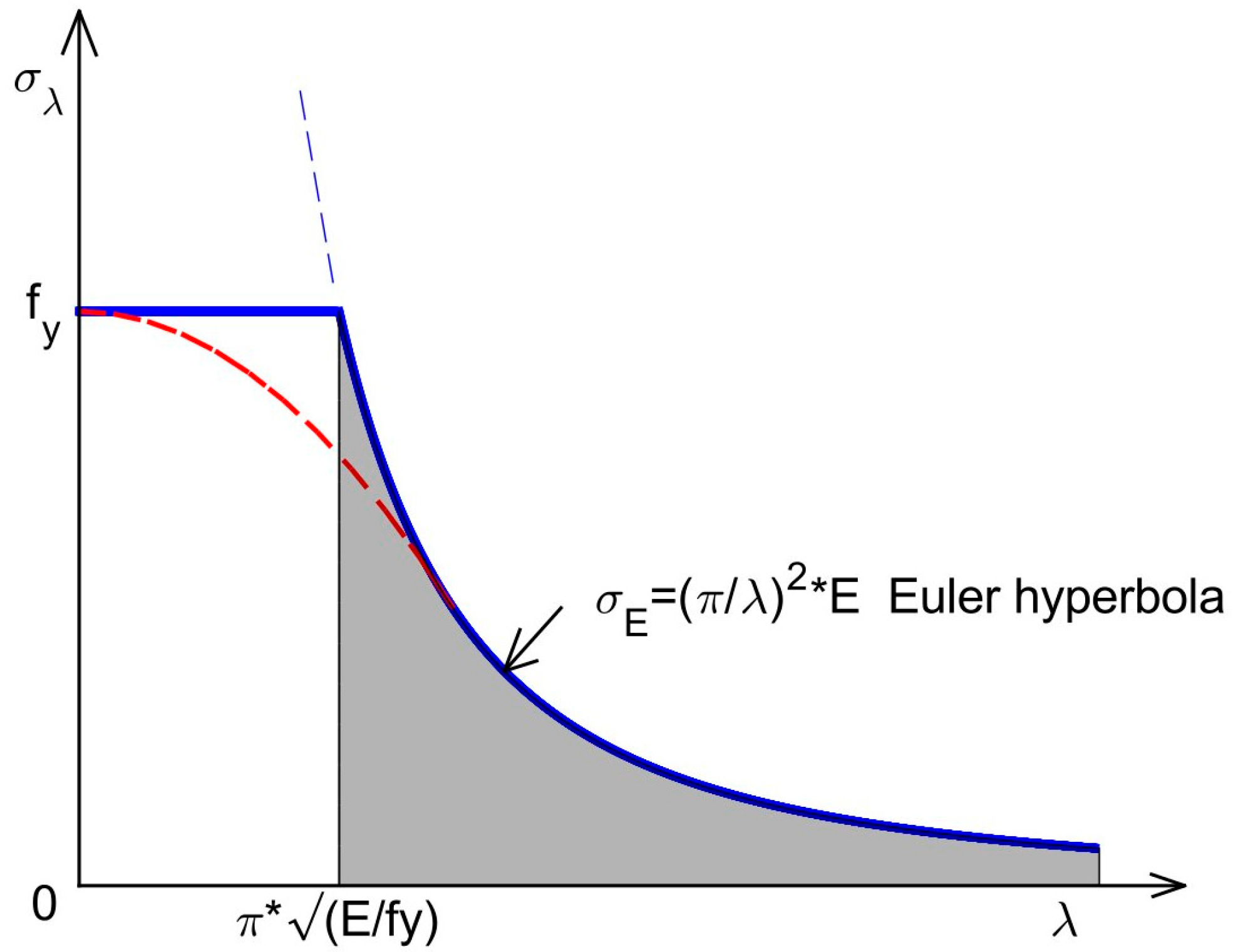
Based on Expressions (85) and (87), the new sections can be controlled preliminary during the modelling phase, in order to define the class of the modified cross-section. By modifying the moment of inertia of the cross-section and by keeping constant the area, based on Cavalieri’s principle, the thickness of the profile’s wall will thin out. The iterative process must keep in mind this phenomenon, to avoid slender sections and to keep the class of the cross-section under 4, as to avoid further verification as presented in SREN 1993-1-6. By representing the buckling stress as a function of slenderness as in
Figure 8, the target zone in this study is the shaded zone. The classification of the cross-section was performed as presented in SREN1993-1-1.
4.4. Aspects Regarding the Failure Condition
The optimization process assumes defining the configuration of the beam-type element through the moment of inertia of the cross-section in order to achieve a failure due to exceeding the design resistance of the cross-section under uniform compression rather than the design buckling resistance of the compression member. A limit state is characterized by appropriate values of the design resistances, which is a clear objective of the optimization process. The mentioned condition is expressed in a mathematical form as in Relation (88) [
28].
In Relation (88), the symbols as in EN1993-1-1,
represent the design resistance of the cross-section under uniform compression and
represent the design buckling resistance of the compression member. The margin of error is considered 5 [%], and the empirical value, is quantified in Relation (88) by coefficient 1.05 [
28].
4.5. Estimating the Error of the Iterative Process
The convergence criteria of the iterative process is to compute a numerical value for the critical buckling load which exceeds the value of the resistance of the cross-section under uniform compression, by modelling a variable cross-section for the beam-type element. To highlight the precision of the proposed method, a parameter is introduced to verify if the displacement field defined based on the defection shape of the beam-type element through the proposed method describes neutral equilibrium at critical load.
The definition of the control parameter,
Error, is conditioned by the assumption that at the state of neutral equilibrium at critical load, the variation of the total potential energy is zero. The displacement field which describes the equilibrium state is approximated through a polynomial function. Therefore the variation of the total potential energy is not equal to zero. To quantify this amount of energy, it is related to the algebraic sum of the strain energy and the energy stored in the elastic support connection due to deformation. The mathematical form of the control parameter is presented in Expression (89).
If the numerical value of the control parameter, defined in Expression (89), is a small finite value, then axial force Q is appropriate to the critical buckling load.
4.6. Determining the Degree of the Polynomial Function v(x)
The displacement field is approximated through a polynomial function of degree n − 1. To fix the degree of the polynomial function, an analysis is performed on an axially loaded Euler column, a joint-supported statically determined system, for which the Rayleigh quotient and the Timoshenko quotient are calculated. This analysis is performed based on the first iteration cycle, with input values for the length of the element, Young’s modulus, and the moment of inertia of the reference cross-section unitary.
Based on the two methods of approximating the critical buckling loads, the analysis assumes the variation of the polynomial function’s degree until the numerical values for the critical buckling load are equal. The analysis is performed on an Euler column with a constant cross-section with results presented in
Table 2 and on an Euler column with variable cross-section, with the coefficients which describe the variation of the moment of inertia
, results presented in
Table 3.
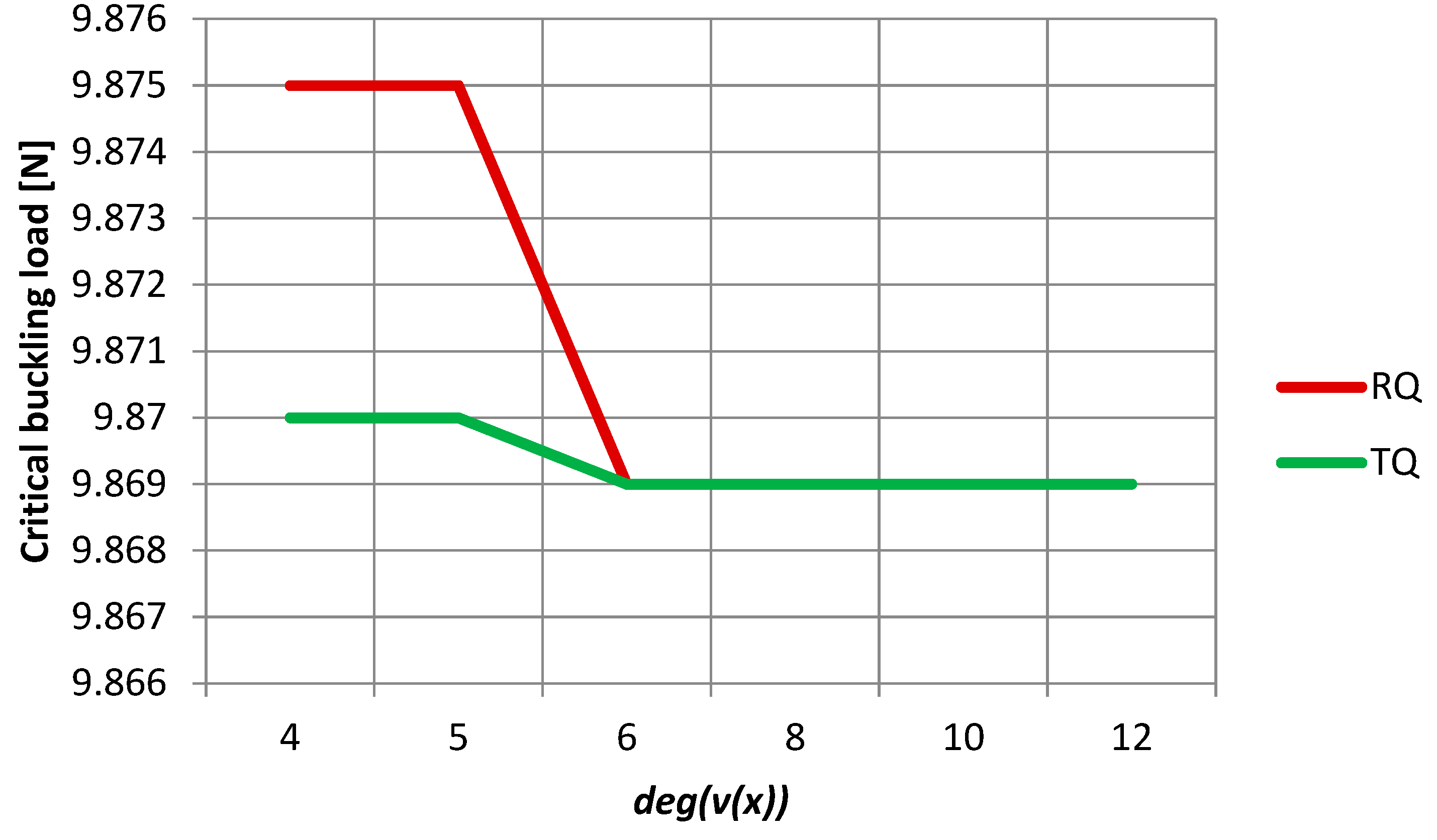
In the case of the constant cross-section Euler column, the maximum error is 0.519%. The numerical values in
Table 2 are presented in a graphical form in
Figure 9.
Based on the data from
Table 2, for the constant cross-section Euler column, it is sufficient to model the displacement field through a polynomial function of degree eight.
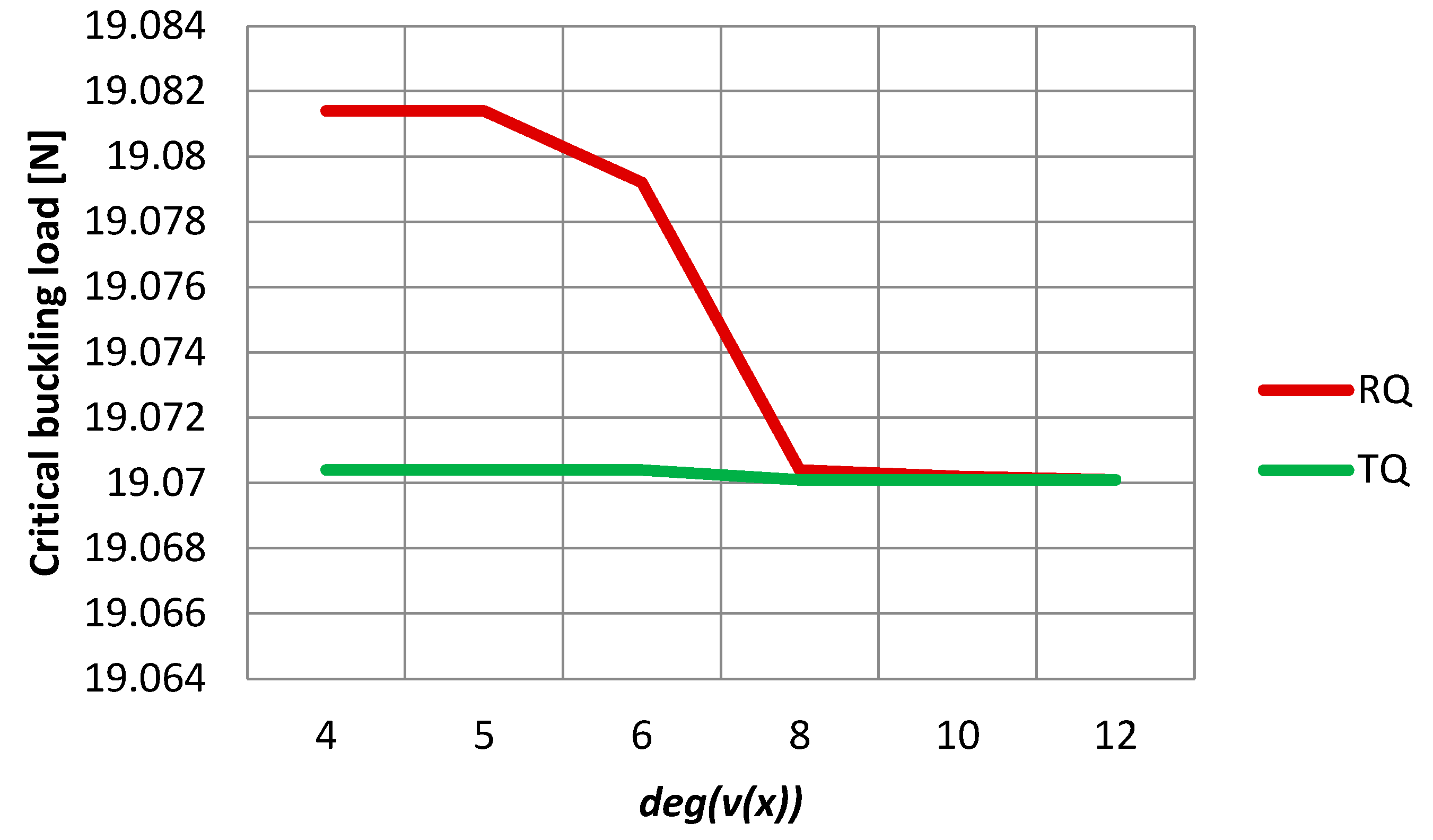
In the case of the variable cross-section beam-type element, the maximum error is 0.573%. The numerical values in
Table 3 are presented in a graphical form in
Figure 10.
Based on the data from
Table 3, for the variable cross-section Euler column, it is sufficient to model the displacement field through a polynomial function of degree six.
Table 3.
The results of the analysis for the variable cross-section Euler column.
Table 3.
The results of the analysis for the variable cross-section Euler column.
| deg(v(x)) | RQ [N] | TQ [N] | (RQ–TQ)·103 [N] |
|---|
| 12 | 19.0701 | 19.0701 | 0.0032 |
| 10 | 19.0702 | 19.0701 | 0.0276 |
| 8 | 19.0704 | 19.0701 | 0.2438 |
| 6 | 19.0792 | 19.0704 | 8.7387 |
| 5 | 19.0814 | 19.0704 | 10.9261 |
| 4 | 19.0814 | 19.0704 | 10.9261 |
4.7. Aspects Regarding the Modelling Phase concerning the Rayleigh Quotient
The approximation of the critical buckling load, through the Rayleigh quotient, presumes an iterative process through it is assumed a particular deflection shape, then after h iteration cycles, the critical buckling load is approximated concerning the modelling assumptions. The number of iteration cycles h is established based on the number of deflection shapes taken into account, through the moment of inertia of the cross-section.
In this study, it is assumed a particular variation of the moment of inertia of the cross-section, approximates the deflection shape of the beam-type element. By modifying the coefficients which describe the variation of the moment of inertia it is obtained a new defection shape, which is more appropriate to the real deflection shape, therefore the Rayleigh quotient decreases to a value more appropriate to the critical buckling load.
With the modification of the shape of the beam-type element, a new displacement field is obtained, and also the elastic stiffness matrix is changing therefore the critical buckling force increases. This is the basis of the first iterative cycle.
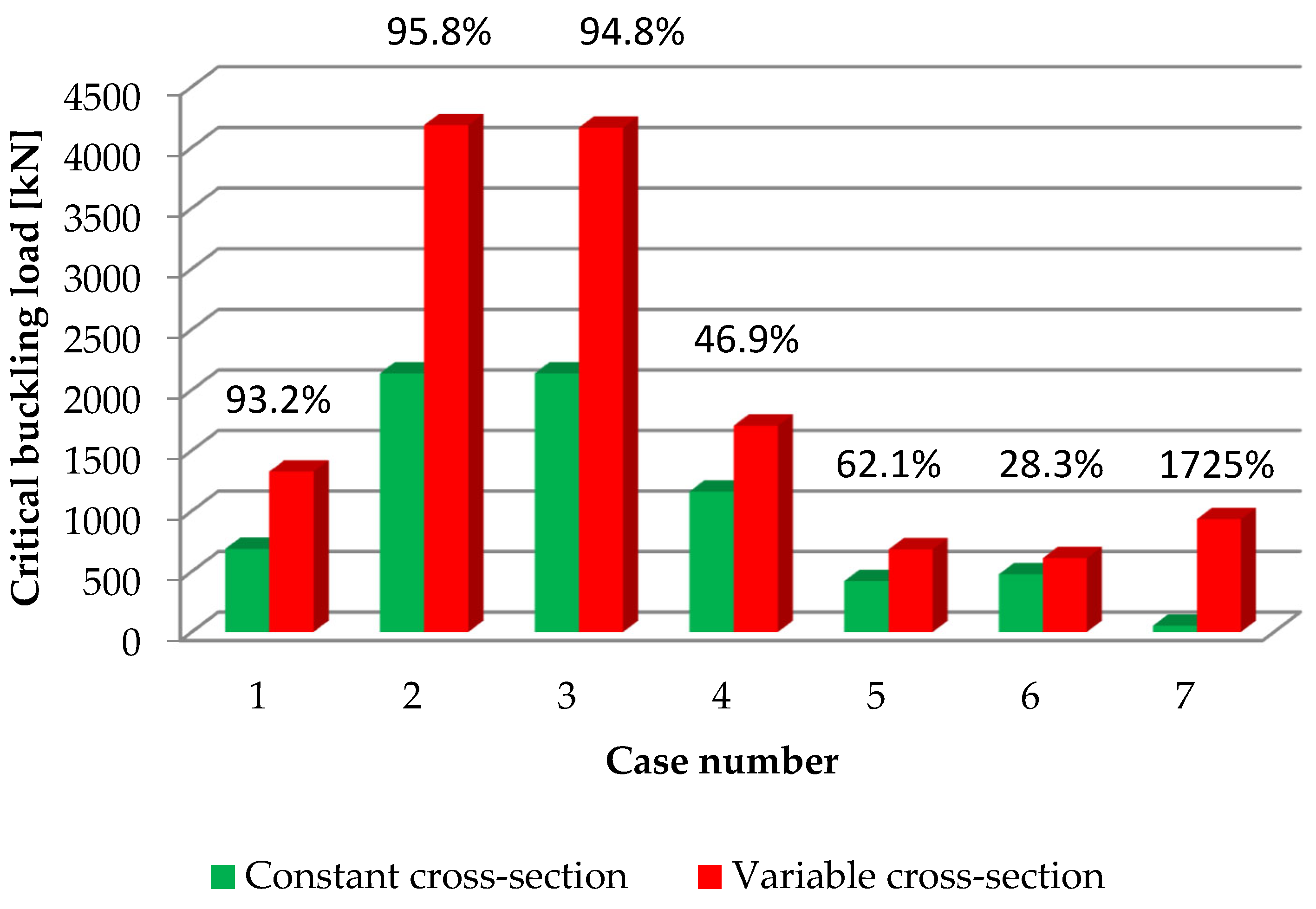
5. Case Study/Parametric Study/Computational Examples
The computational examples assume the study of statically determinate and indeterminate beam-type elements, six situations with ideal support connections, and also the consequence of the elastic support connections.
The starting point of every individual study is fixing the „reference” beam-type element, with a constant cross-section. The given element is modeled to achieve a critical buckling load superior to the resistance of the cross-section at uniform compression, explicitly to avoid the loss of stability.
The modelling of the beam-type element assumes knowing the kinematic boundary conditions. The kinematic boundary conditions in the case of ideal support connections can be defined as a zero displacement field. Regardless of the imposed kinematic boundary conditions the beam-type elements are considered with an equal geometric length of 6000 [mm], Young’s modulus of 2.1·105 [N/mm2], and yield strength of the steel, fy, with the value of 355 [N/mm2].
- a)
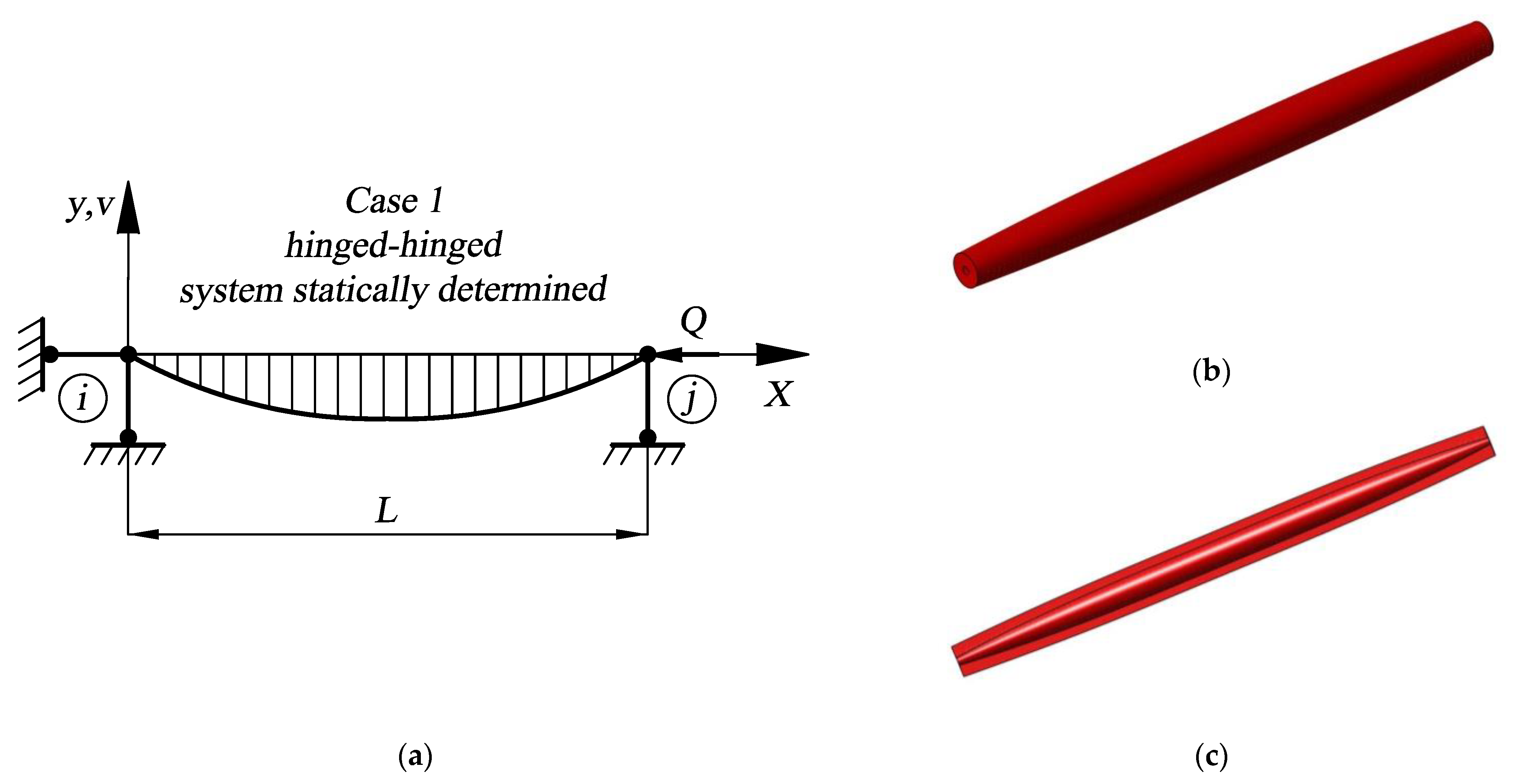
The hinged-hinged beam-type element
The hinged-hinged beam-type element is presented in
Figure 11a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
163.8x8–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [
inf 0
inf 0]. The results of the iterative optimization phase are presented in
Table 4 and the graphical representation of the data from
Table 4 is presented in
Figure 12.
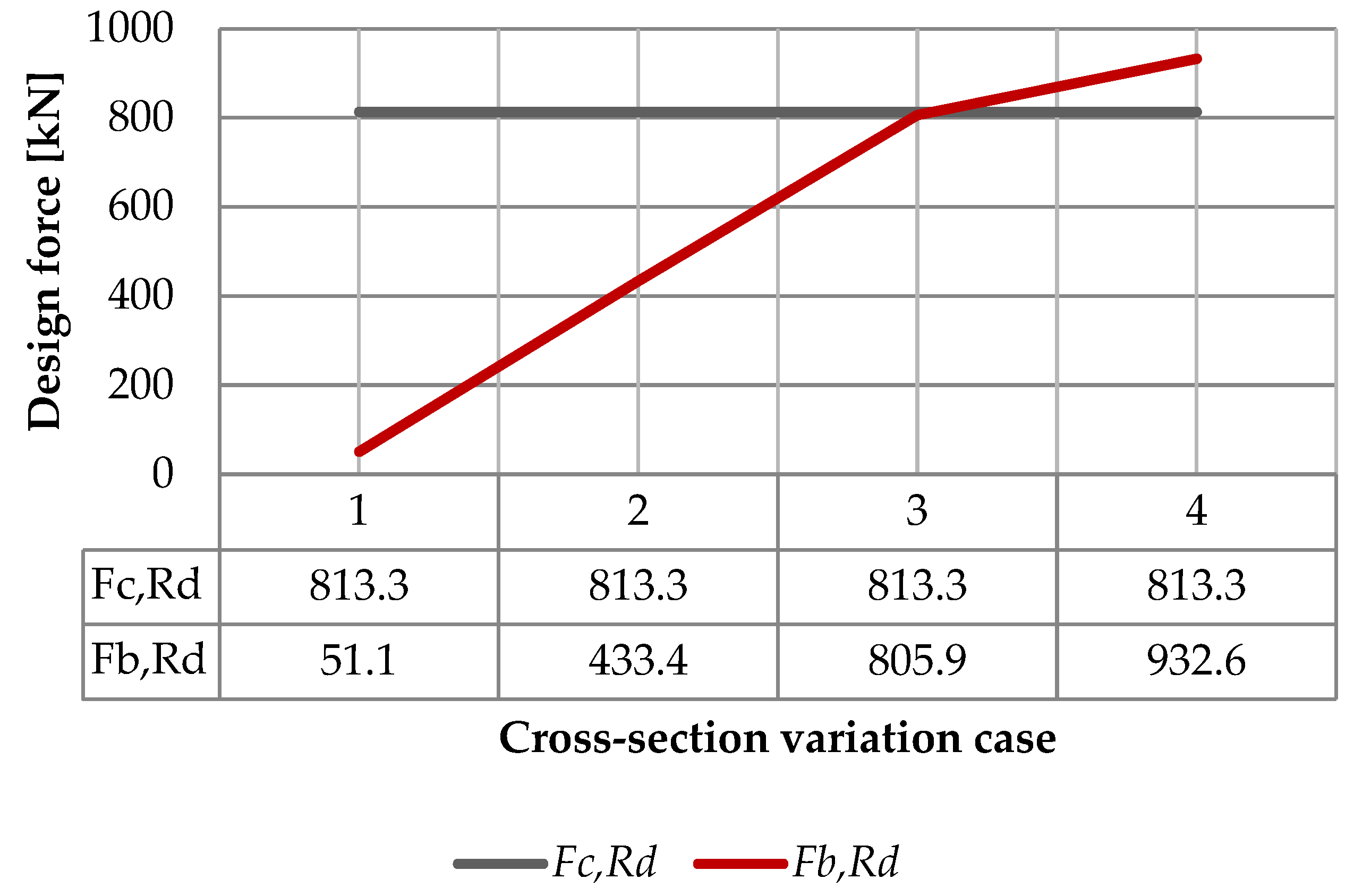
In
Table 4 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled hinged-hinged beam-type element is presented in
Figure 11b,c.
In the case of the hinged-hinged beam-type element through the variation of the cross-section, without material addition, a significant increase of
93.23% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 12.
- b)
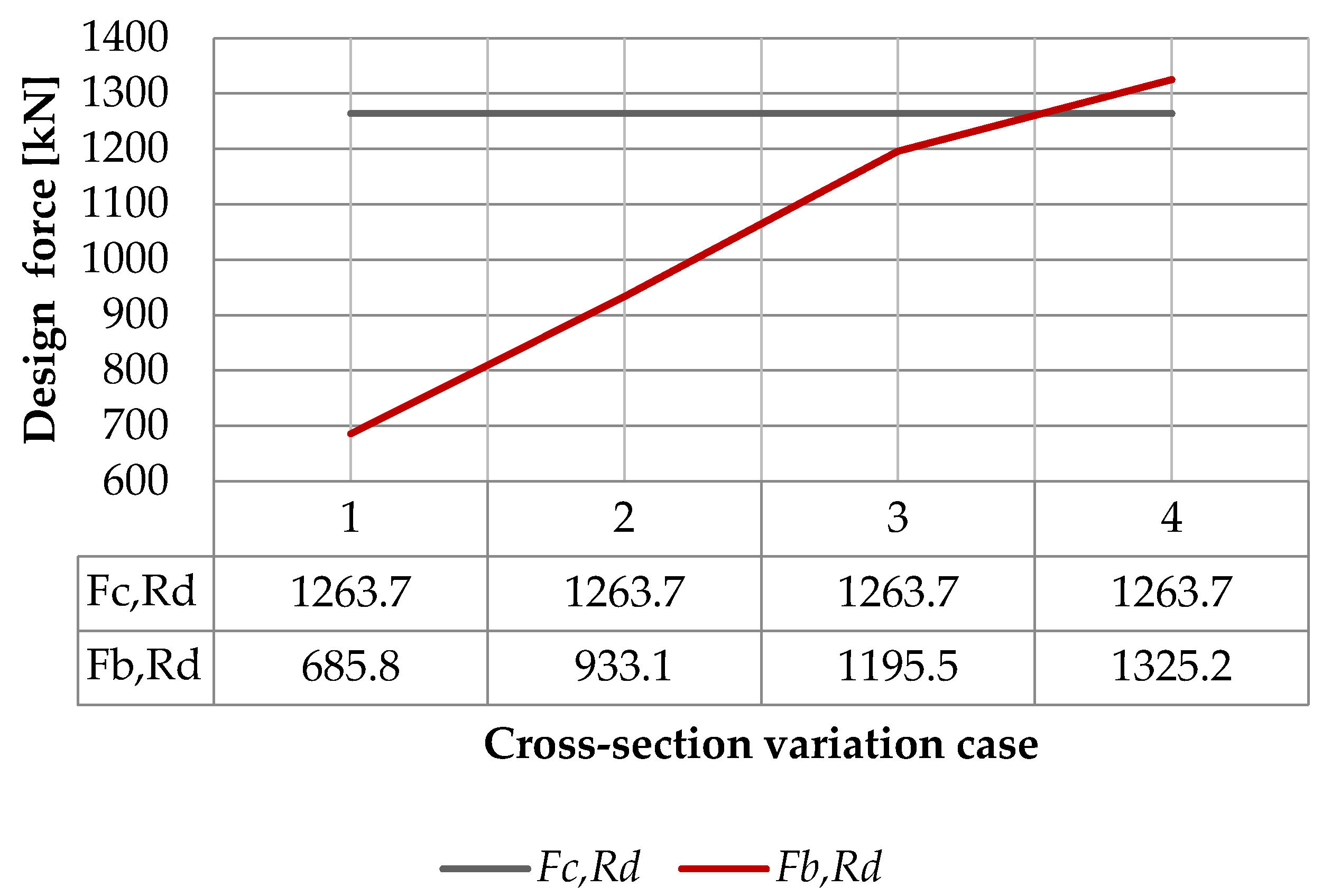
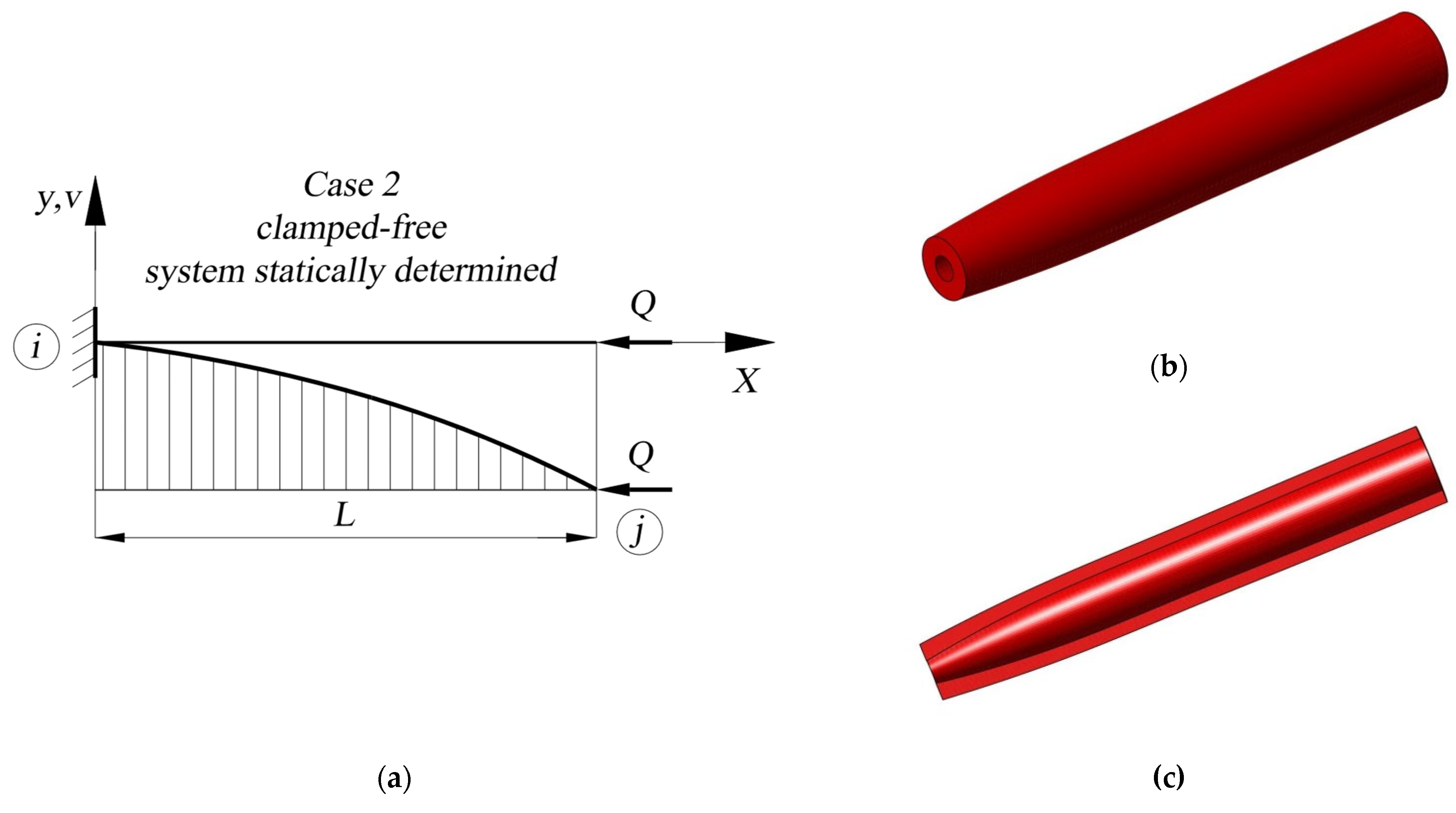
The clamped-free beam-type element
The clamped-free beam-type element is presented in
Figure 13a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
323.9x12.5–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [
inf inf 0 0]. The results of the iterative optimization phase are presented in
Table 4 and the graphical representation of the data from
Table 5 is presented in
Figure 14.
In
Table 5 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled clamped-free beam-type element is presented in
Figure 13b,c.
In the case of the clamped-free beam-type element through the variation of the cross-section, without material addition, a significant increase of
95.79% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 14.
- c)
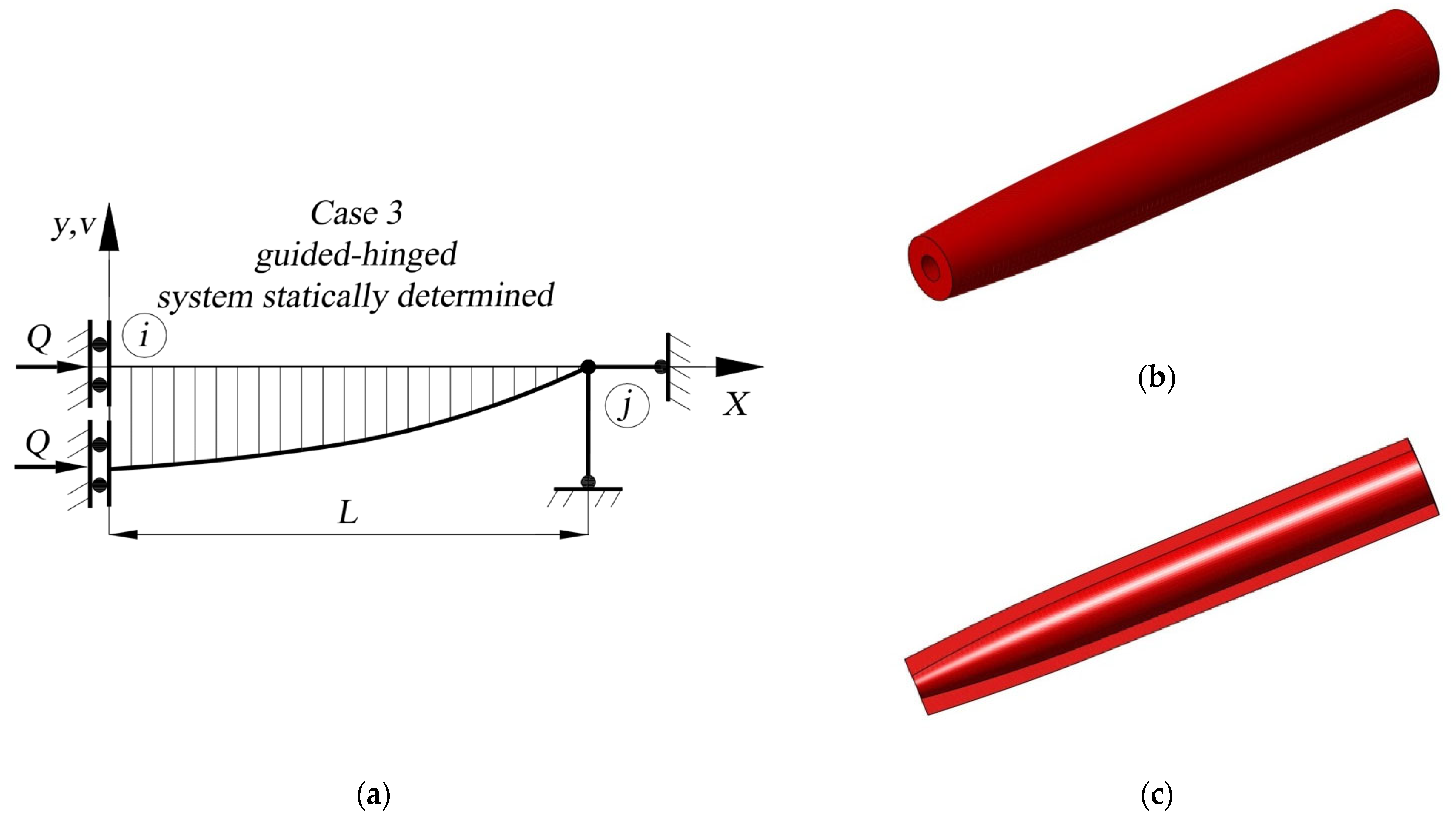
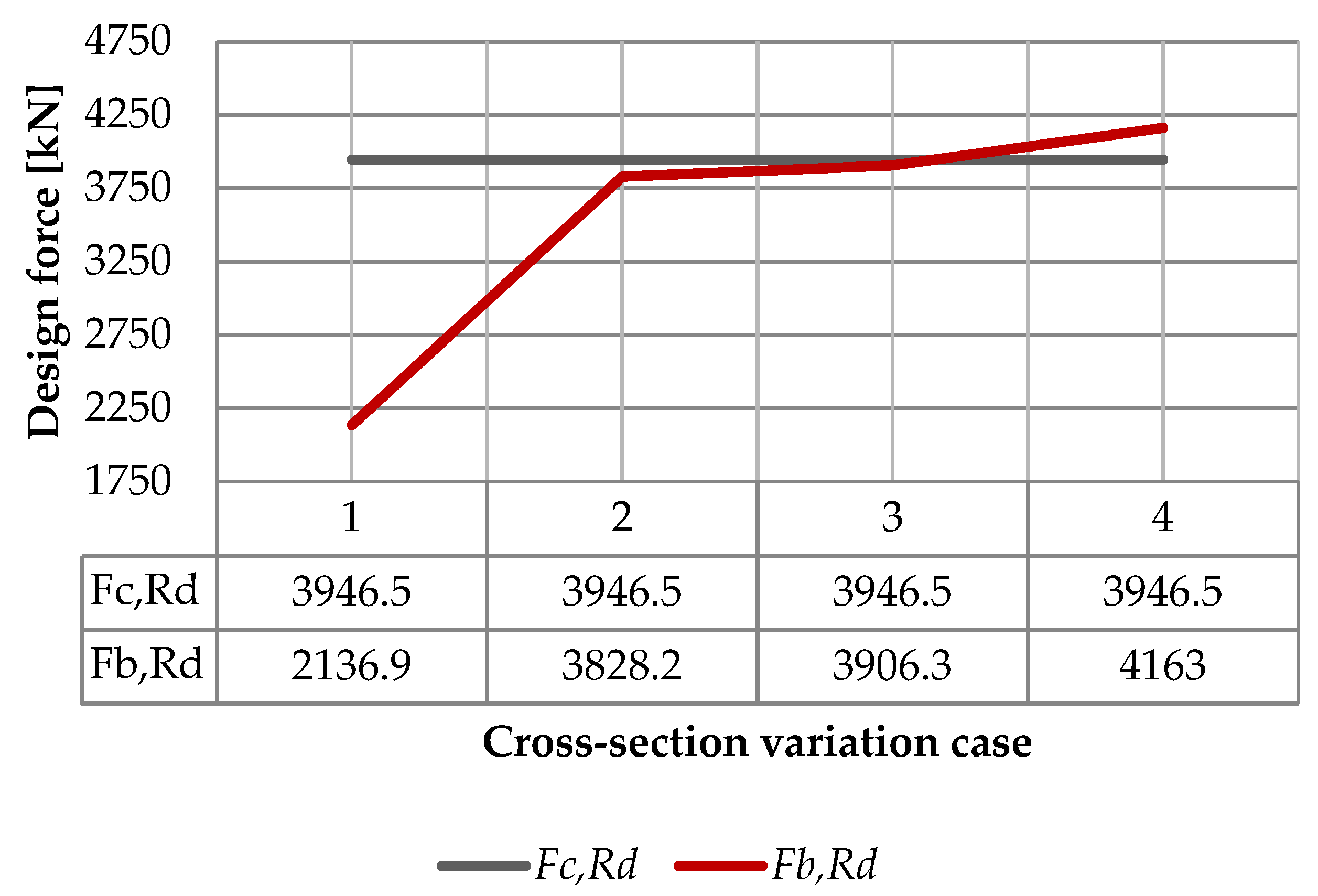
The guided-hinged beam-type element
The guided-hinged beam-type element is presented in
Figure 15a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
323.9x12.5–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [0
inf inf 0]. The results of the iterative optimization phase are presented in
Table 6 and the graphical representation of the data from
Table 6 is presented in
Figure 16.
In
Table 6 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled guided-hinged beam-type element is presented in
Figure 15b,c.
In the case of the guided-hinged beam-type element through the variation of the cross-section, without material addition, a significant increase of
94.81% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 16.
- d)
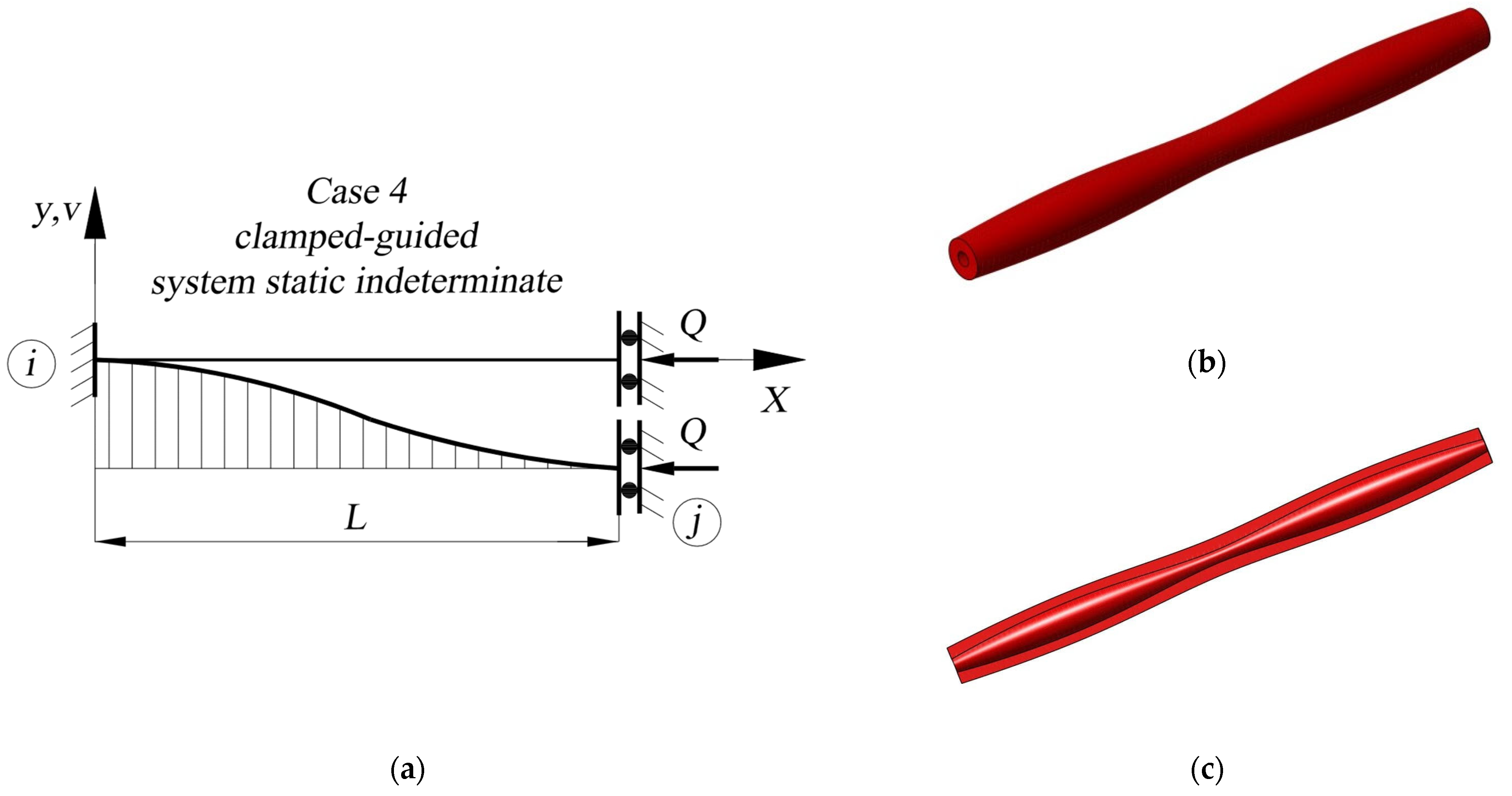
The clamped-guided beam-type element
The clamped-guided beam-type element is presented in
Figure 17a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
193.7x8–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [
inf inf 0
inf]. The results of the iterative optimization phase are presented in
Table 7 and the graphical representation of the data from
Table 7 is presented in
Figure 18.
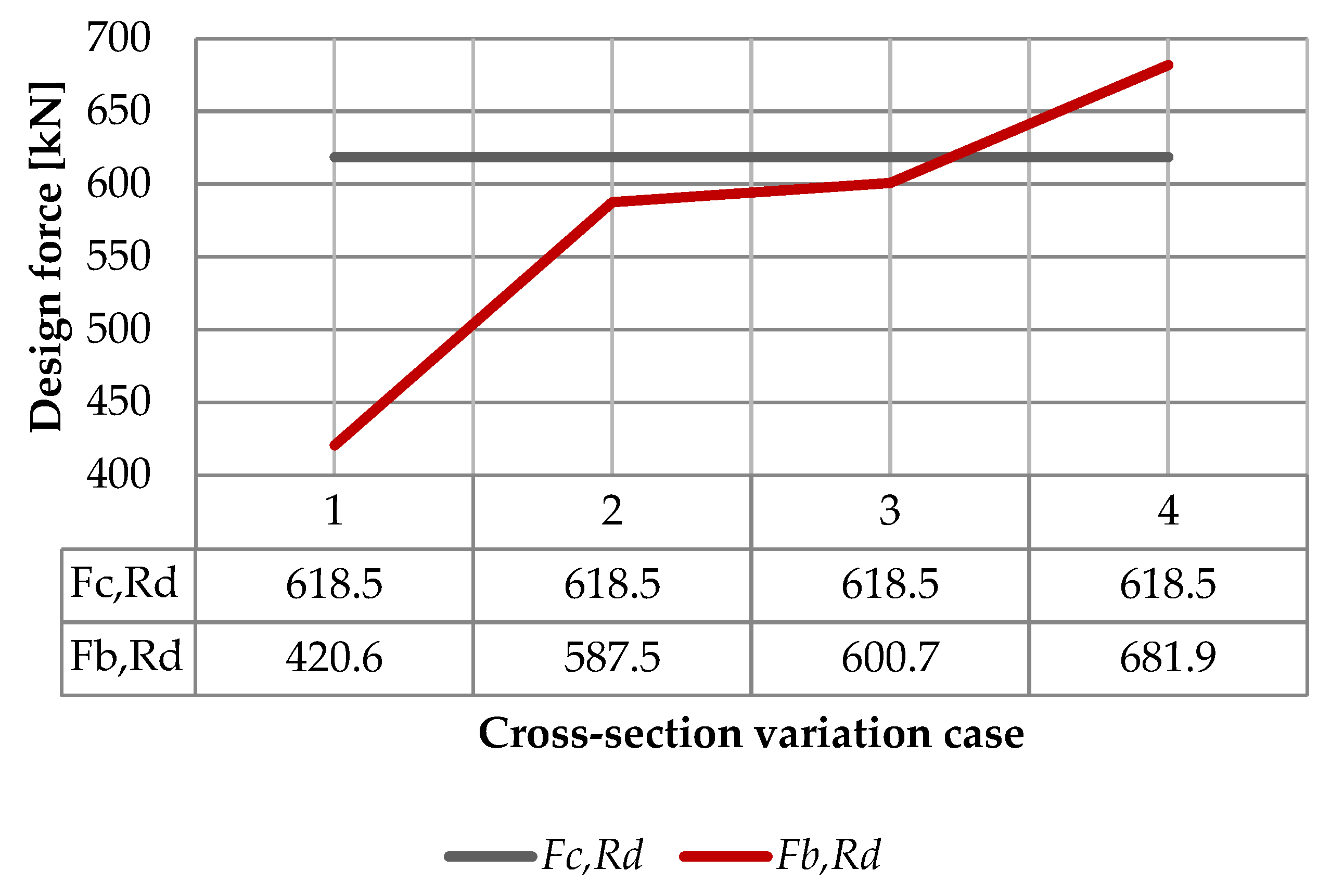
In
Table 7 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled clamped-guided beam-type element is presented in
Figure 17b,c.
In the case of the clamped-guided beam-type element through the variation of the cross-section, without material addition, a significant increase of
46.91% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 18.
- e)
The hinged-clamped beam-type element
The hinged-clamped beam-type element is presented in
Figure 19a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
127x5–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [
inf 0
inf inf]. The results of the iterative optimization phase are presented in
Table 8 and the graphical representation of the data from
Table 8 is presented in
Figure 20.
In
Table 8 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled hinged-clamped beam-type element is presented in
Figure 19b,c.
In the case of the hinged-clamped beam-type element through the variation of the cross-section, without material addition, a significant increase of
62.13% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 20.
- f)
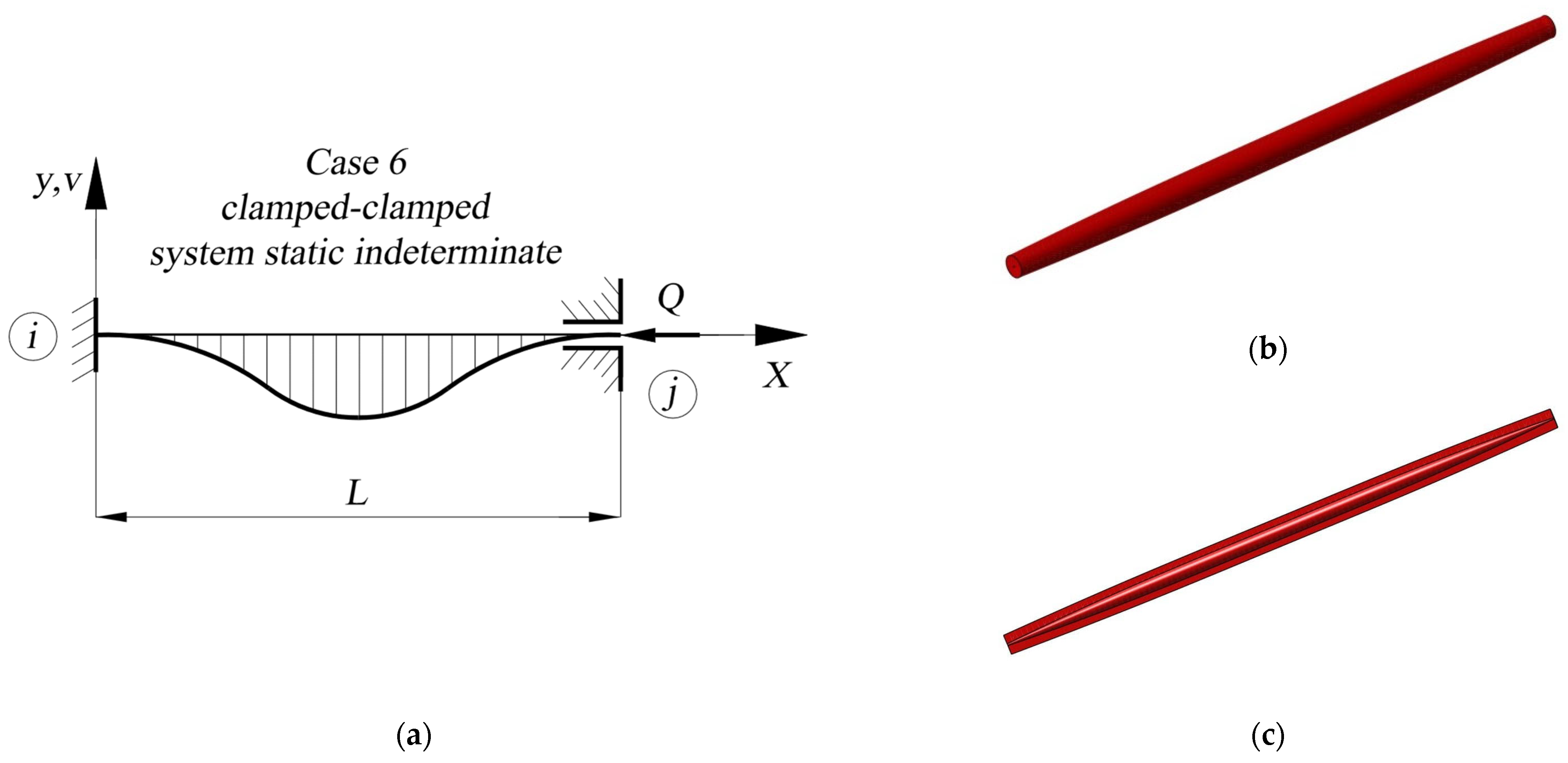
The clamped-clamped beam-type element
The clamped-clamped beam-type element is presented in
Figure 21a, which highlights the kinematic boundary conditions. The type of profile imposed on the reference cross-section is CHS
101.6x6–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [
inf inf inf inf]. The results of the iterative optimization phase are presented in
Table 9 and the graphical representation of the data from
Table 9 is presented in
Figure 22.
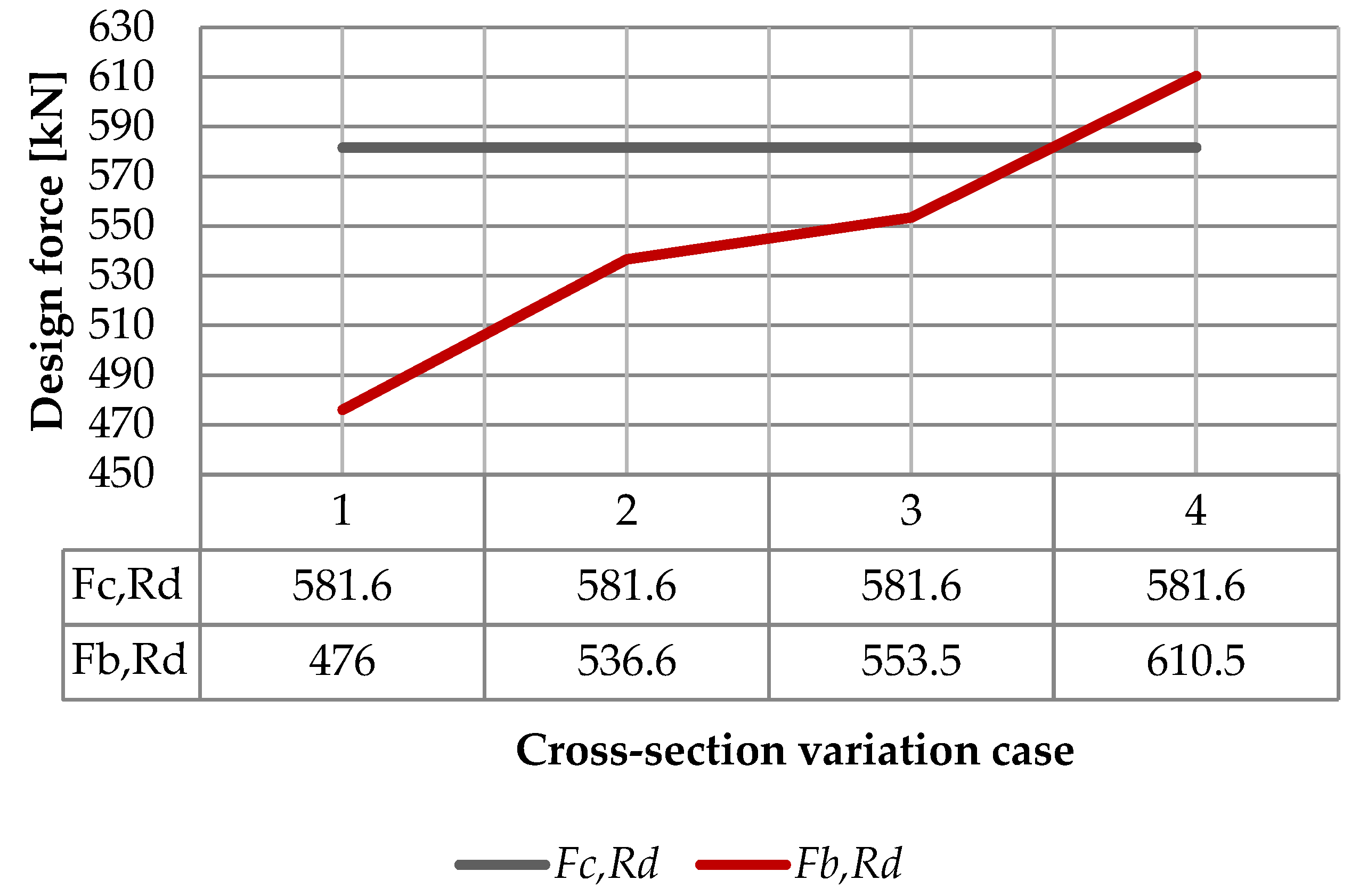
In
Table 9 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle. The modeled clamped-clamped beam-type element is presented in
Figure 21b,c.
In the case of the clamped-clamped beam-type element through the variation of the cross-section, without material addition, a significant increase of
28.25% for the critical buckling load is obtained and ensuring a proper failure condition as presented in
Figure 22.
- g)
The clamped-clamped beam-type element
The beam-type element with elastic supports is presented in
Figure 23a, which highlights the kinematic boundary conditions. The type of profile imposed to the reference cross-section is CHS
101.6x6–6000–S355JO–EN10219, respectively values for the stiffness of the support connections are [0.002 [kN/m] 28.935 [kNm/m] 0.002 [kN/m] 28.935 [kNm/m]]·10
4 established according to Expression (64). The results of the iterative optimization phase are presented in
Table 10 for ideal and elastic restraints.
In
Table 10, the symbol
fin represents the finite numerical value for the corresponding stiffness of the elastic support, determined according to Expression (64). The symbol
inf represents the ideal beam-type element support connections stiffness. In
Table 10 it is highlighted that considering finite numerical values for the stiffness of the support connections the critical buckling load decreases radically, for example in case 1b the buckling force
decreases by
84.07% and in case 2b buckling force
decreases with
55.31%.
To avoid such sudden changes, which influence negatively the failure condition, another type of cross-section is chosen, with superior geometric and inertial characteristics. In
Table 11 the data from modelling a beam-type element with elastic support is presented with the reference cross-section CHS
139.7x6–6000–S355JO–EN10219, and the numerical values for the stiffness of the support connections [0.007 [kN/m] 78.996 [kNm/m] 0.007 [kN/m] 78.996 [kNm/m]]·10
4 determined according to Expression (64).
In
Table 11 as a function of the variation of the moment of inertia the resistance of the cross-section for uniform compression,
Fc,Rd, and the buckling resistance,
Fb,Rd, is computed and in the last column is presented the estimated error of the iteration cycle.
In the case of the beam-type element with elastic supports through the modification of the cross-section, without material addition, a significant increase of
1725.05% for the critical buckling load is obtained as against the new reference cross-section beam-type element, and it is ensured a propper failure condition as presented in
Figure 24.
Figure 23b,c are presented the beam-type element with elastic supports. In
Table 12 a comparison is presented of the critical buckling forces without and with elastic support, with the variation coefficients of the moment of inertial extracted from
Table 10.
Case 1b from
Table 12 highlights the fact that by adding elastic supports the failure occurs due to the loss of stability and variation modelling a variable cross-section for the beam-type element is not appropriate and the reference cross-section with superior geometric and inertial properties is required.
Case 2b from
Table 12 highlights that by adding elastic supports for a reference cross-section with superior geometric and inertial properties the failure occurs due to exceeding the resistance of the cross-section under uniform compression and variation modelling a variable cross-section for the beam-type element is necessary. Adopting elastic support instead of ideal support connections
at least a 55% decrease is noticed in case of the critical buckling force.
The explanation for the radical decrease of the critical buckling force in the case of elastic support connections may be found in an analysis of the displacement field of a constant cross-section beam-type element loaded with axial forces and bending moments at the joints. In the case of the hinged-hinged beam-type element the displacements associated with the bending moment
M, are proportional with
M·L2 divided by the stiffness coefficient
E·I, expressed in Relation (90a). The displacements associated with the axial force
Q, are proportional with
Q·L divided by the stiffness coefficient
E·A, presented in Relation (90b) [
29].
The quantities expressed in Relation (90a,b) have the same order of magnitude if conditions from Relation (91a,b) are satisfied, with respect to Brachmann-Landau notation [
30].
For the quantities defined in Relation (91a,b), Relation (92) can be expressed, for a node in
interval [
29].
By expressing ratio
M/Q from Relation (92) with respect to Hooke’s law and Navier’s relation, Expression (93) is obtained [
31].
In Relation (93),
represents stress associated with the bending moment,
represents the stress associated with the axial load, and for a tubular circular cross-section ratio,
I/W is equal to a maximal distance of section point from the neutral axis that crosses the centroid, in the present situation it represents the half of the outside diameter of the profile,
D, which leads to Relation (93) and thus Relation (94) [
29].
The right part of the Relation (94) represents a considerably small ratio, representing the ratio between the outside diameter and the length of the element, therefore
has the same order of magnitude compared to
. Based on the mathematical relation of the Euler-Bernoulli beam theory, Relation (94) can be expressed as Relation (95) [
29].
In Relation (95)
serve as the maximal strain associated with the bending moment and
denote the strain associated with the axial load. Based on the expression of the maximal strain of the cross-section,
ε, Expression (96) is obtained [
29].
In Relation (96) is highlighted the influence of strain associated with the bending moment on the displacement field of the beam-type element, with in this case is practically insignificant. In this manner by adding elastic support connections with finite values for the stiffnesses, computed based on the Expression (64), regardless of the imposed boundary conditions, the beam-type element’s behavior is practically identical to the Euler column.
The method through the ideal support connection is replaced with elastic support connection, with finite numerical values for the stiffness coefficients computed based on the deformability of the structural assembly, must consider the fact that the numerical value of the critical buckling load can be half as computed. To better understand the phenomena, one can make an analogy with a planer truss with rigid nodes and structural assemblies with high statical indeterminacy, due to the axial strain of the structural elements, in the joints of the beam-type elements bending moments will occur as a function of the relative rotation of the trusses, an effect which has been proven to be a secondary one.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}























