

Monocular Facial Presentation–Attack–Detection: Classifying Near-Infrared Reflectance Patterns



Abstract
:Featured Application
Abstract
1. Introduction
- Novel application material spectroscopy towards facial presentation–attack–detection;
- Novel near-infrared surface-reflectance mathematical model for facial-liveliness;
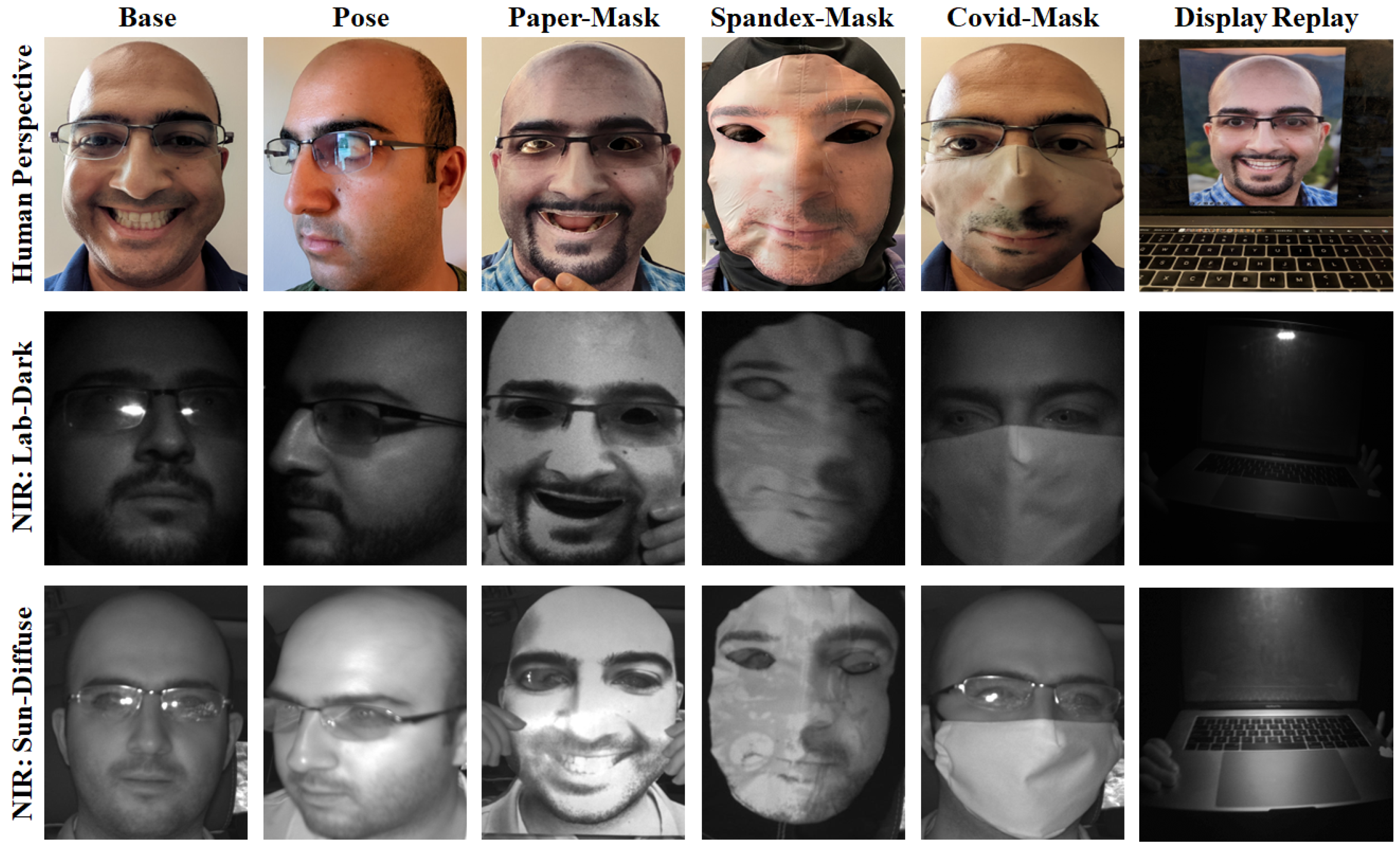
- Novel near-infrared data-collection of 30 diverse participants with NIST guided attacks that vary instrument, pose, distance, and lighting;
- Benchmarking the proposed methodology with 13 texture algorithms, enabling a conventional MobileNetV3 algorithm to achieve state-of-the-art performance.
2. Related Works
2.1. Depth Sensing-Based Spoof Detection
2.2. Motion-Based Spoof Detection
2.3. Texture and Color-Based Spoof Detection
2.4. Texture and Motion Fusion-Based Spoof Detection
2.5. Literature Opportunity: Near-Infrared Reflectance Patterns
3. Near-Infrared Reflectance Methodology
3.1. Facial Reflectance Modeling
3.2. Liveliness Hypothesis
3.3. Classification Methodology
4. Presentation–Attack–Detection Experiment
4.1. Dataset Collection
4.2. Texture Classifiers for Benchmarking
4.2.1. Deterministic: Local Binary Patterns
4.2.2. Deterministic: Discrete Cosine Transform
4.2.3. Deterministic: Ranked Channel Histograms
4.2.4. Deterministic: Random Fourier Series
4.2.5. Deep Learning: Baseline Image Classification Networks
4.2.6. Deep Learning: Central Difference Network
4.2.7. Deep Learning: Spoof Cues Network
4.2.8. Deep-Learning: Dual-Branch Depth Network
4.3. Texture Method Evaluation
4.4. Research Limitations
5. Experimental Results
6. Discussion
7. Patents
- COUNTERFEIT IMAGE DETECTION (USPTO Case ID: 84238879US01). Convenience security facial-authentication using near-infrared camera specular reflectance. Person is first identified, then verified their compensated specular reflectance meets the liveliness-enrollment-similarity score.
- COUNTERFEIT IMAGE DETECTION (USPTO Case ID: 84227552US01). Secure facial-authentication capable of detecting complex 3D masks via co-registered CMOS and thermal cameras. CMOS camera is used to detect and identify the face; liveliness is determined using thermal analysis. System is secure with very efficient liveliness analysis.
- MATERIAL SPECTROSCOPY (USPTO Case ID: 84279449US01). Material source-identification using combined RGB-IR spectroscopy analysis. RGB provides material color context for near-infrared material spectroscopy. This provides a naive Anti-Spoofing approach (versus specular reflectance verification against enrollment).
- MATERIAL SPECTROSCOPY (USPTO Case ID: 84279422US01). Facial optical-tethering methods for material spectroscopy liveliness-analysis. Facial distance and orientation are determined using deterministic key-points or deep-learning.
- MATERIAL SPECTROSCOPY (USPTO Case ID: 84279413US01). Facial environment-compensation methods for material spectroscopy liveliness analysis. Sequenced light toggling is used to detect the face with an illuminated frame and de-noise the background using non-illuminated frame analysis.
- MATERIAL SPECTROSCOPY (USPTO Case ID: 84279409US01). Facial segmentation methods for material spectroscopy liveliness-analysis. In particular, emphasis is placed upon segmenting “skin” pixels either using deterministic key-points or semantically using deep-learning.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FR | Face recognition |
| NIST | National Institute of Standards and Technologies |
| PAD | Presentation–attack–detection |
References
- Schroff, F.; Kalenichenko, D.; Philbin, J. Facenet: A unified embedding for face recognition and clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 815–823. [Google Scholar]
- Google. Biometrics | Android Open Source Project. 2021. Available online: https://source.android.com/security/biometric (accessed on 1 June 2021).
- Pascu, L. Biometric Facial Recognition Hardware Present in 90% of Smartphones by 2024: Biometric Update. 2020. Available online: https://www.biometricupdate.com/202001/biometric-facial-recognition-hardware-present-in-90-of-smartphones-by-2024 (accessed on 1 June 2021).
- Thabet, A.B.; Amor, N.B. Enhanced smart doorbell system based on face recognition. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 373–377. [Google Scholar]
- Calvello, M. 22 Eye-Opening Facial Recognition Statistics for 2020. 2019. Available online: https://www.g2.com/articles/facial-recognition-statistics (accessed on 1 October 2022).
- Reservations.com. Facial Recognition Statistics in Airports: Survey Shows 43% Approve, 33% Disapprove. 2020. Available online: https://www.reservations.com/blog/resources/facial-recognition-airports-survey/ (accessed on 1 October 2022).
- Oliva, J. Genesis GV60 will Recognize Your Face to Unlock the Car. 2021. Available online: https://www.motor1.com/news/533678/genesis-gv60-facial-recognition/ (accessed on 1 October 2022).
- Newton, E.; Schuckers, S. Recommendations for Presentation Attack Detection (PAD): Mitigation of Threats Due to Spoof Attacks. 2020. Available online: https://www.nist.gov/system/files/documents/2020/09/03/10_ibpc-prez-fido-ssanden-v5.pdf (accessed on 1 May 2021).
- Nesli, E.; Marcel, S. Spoofing in 2d face recognition with 3d masks and anti-spoofing with kinect. In Proceedings of the IEEE 6th International Conference on Biometrics: Theory, Applications and Systems (BTAS’13), Washington, DC, USA, 29 September–2 October 2013; pp. 1–8. [Google Scholar]
- Zhang, S.; Wang, X.; Liu, A.; Zhao, C.; Wan, J.; Escalera, S.; Shi, H.; Wang, Z.; Li, S.Z. A dataset and benchmark for large-scale multi-modal face anti-spoofing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 919–928. [Google Scholar]
- Asim, M.; Ming, Z.; Javed, M.Y. CNN based spatio-temporal feature extraction for face anti-spoofing. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; pp. 234–238. [Google Scholar]
- Firbank, M.; Oda, M.; Delpy, D.T. An improved design for a stable and reproducible phantom material for use in near-infrared spectroscopy and imaging. Phys. Med. Biol. 1995, 40, 955. [Google Scholar] [CrossRef] [PubMed]
- Chingovska, I.; Anjos, A.; Marcel, S. On the effectiveness of local binary patterns in face anti-spoofing. In Proceedings of the 2012 BIOSIG-Proceedings of the International Conference of Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 6–7 September 2012; pp. 1–7. [Google Scholar]
- Er, M.J.; Chen, W.; Wu, S. High-speed face recognition based on discrete cosine transform and RBF neural networks. IEEE Trans. Neural Netw. 2005, 16, 679–691. [Google Scholar] [CrossRef] [PubMed]
- Rahimi, A.; Recht, B. Weighted sums of random kitchen sinks: Replacing minimization with randomization in learning. Adv. Neural Inf. Process. Syst. 2008, 21, 1313–1320. [Google Scholar]
- Wen, D.; Han, H.; Jain, A.K. Face spoof detection with image distortion analysis. IEEE Trans. Inf. Forensics Secur. 2015, 10, 746–761. [Google Scholar] [CrossRef]
- Howard, A.; Sandler, M.; Chu, G.; Chen, L.C.; Chen, B.; Tan, M.; Wang, W.; Zhu, Y.; Pang, R.; Vasudevan, V.; et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27–28 October 2019; pp. 1314–1324. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the inception architecture for computer vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2818–2826. [Google Scholar]
- Yu, Z.; Zhao, C.; Wang, Z.; Qin, Y.; Su, Z.; Li, X.; Zhou, F.; Zhao, G. Searching Central Difference Convolutional Networks for Face Anti-Spoofing. In Proceedings of the CVPR, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Feng, H.; Hong, Z.; Yue, H.; Chen, Y.; Wang, K.; Han, J.; Liu, J.; Ding, E. Learning Generalized Spoof Cues for Face Anti-spoofing. arXiv 2020, arXiv:2005.03922. [Google Scholar]
- Jia, Y.; Zhang, J.; Shan, S. Dual-Branch Meta-Learning Network With Distribution Alignment for Face Anti-Spoofing. IEEE Trans. Inf. Forensics Secur. 2021, 17, 138–151. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Liu, A.; Wan, J.; Escalera, S.; Jair Escalante, H.; Tan, Z.; Yuan, Q.; Wang, K.; Lin, C.; Guo, G.; Guyon, I.; et al. Multi-modal face anti-spoofing attack detection challenge at cvpr2019. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–17 June 2019. [Google Scholar]
- Purnapatra, S.; Smalt, N.; Bahmani, K.; Das, P.; Yambay, D.; Mohammadi, A.; George, A.; Bourlai, T.; Marcel, S.; Schuckers, S.; et al. Face liveness detection competition (livdet-face)-2021. In Proceedings of the 2021 IEEE International Joint Conference on Biometrics (IJCB), Shenzhen, China, 4–7 August 2021; pp. 1–10. [Google Scholar]
- Zhang, Y.; Yin, Z.; Shao, J.; Liu, Z.; Yang, S.; Xiong, Y.; Xia, W.; Xu, Y.; Luo, M.; Liu, J.; et al. Celeba-spoof challenge 2020 on face anti-spoofing: Methods and results. arXiv 2021, arXiv:2102.12642. [Google Scholar]
- Patel, K.; Han, H.; Jain, A.K. Secure face unlock: Spoof detection on smartphones. IEEE Trans. Inf. Forensics Secur. 2016, 11, 2268–2283. [Google Scholar] [CrossRef]
- Uchida, N.; Shibahara, T.; Aoki, T.; Nakajima, H.; Kobayashi, K. 3D face recognition using passive stereo vision. In Proceedings of the IEEE International Conference on Image Processing 2005, Genova, Italy, 14 September 2005; IEEE: Piscataway, NJ, USA, 2005; Volume 2, pp. II-950–II-953. [Google Scholar]
- Hansen, M.F.; Atkinson, G.A.; Smith, L.N.; Smith, M.L. 3D face reconstructions from photometric stereo using near infrared and visible light. Comput. Vis. Image Underst. 2010, 114, 942–951. [Google Scholar] [CrossRef]
- Plank, H.; Almer, M.; Lobnik, R.; Steger, C.; Ruprechter, T.; Bock, H.; Haid, J.; Holweg, G.; Druml, N. OptiSec3D-A new Paradigm in Secure Communication and Authentication featuring Time-of-Flight. In Proceedings of the EWSN, Graz, Austria, 15–17 February 2016; pp. 335–340. [Google Scholar]
- Atkinson, G.A.; Hansen, M.F.; Smith, M.L.; Smith, L.N. A efficient and practical 3D face scanner using near infrared and visible photometric stereo. Procedia Comput. Sci. 2010, 2, 11–19. [Google Scholar] [CrossRef]
- Tsalakanidou, F.; Forster, F.; Malassiotis, S.; Strintzis, M.G. Real-time acquisition of depth and color images using structured light and its application to 3D face recognition. Real-Time Imaging 2005, 11, 358–369. [Google Scholar] [CrossRef]
- Soukupova, T.; Cech, J. Eye blink detection using facial landmarks. In Proceedings of the 21st Computer Vision Winter Workshop, Rimske Toplice, Slovenia, 3–5 February 2016. [Google Scholar]
- Balakrishnan, G.; Durand, F.; Guttag, J. Detecting pulse from head motions in video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 3430–3437. [Google Scholar]
- Li, X.; Chen, J.; Zhao, G.; Pietikainen, M. Remote heart rate measurement from face videos under realistic situations. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 4264–4271. [Google Scholar]
- Wang, S.Y.; Yang, S.H.; Chen, Y.P.; Huang, J.W. Face liveness detection based on skin blood flow analysis. Symmetry 2017, 9, 305. [Google Scholar] [CrossRef]
- Boulkenafet, Z.; Komulainen, J.; Hadid, A. Face anti-spoofing based on color texture analysis. In Proceedings of the 2015 IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 2636–2640. [Google Scholar]
- Zhang, W.; Shan, S.; Gao, W.; Chen, X.; Zhang, H. Local gabor binary pattern histogram sequence (lgbphs): A novel non-statistical model for face representation and recognition. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05) Volume 1, Washington, DC, USA, 17–21 October 2005; Volume 1, pp. 786–791. [Google Scholar]
- Gragnaniello, D.; Cozzolino, D.; Marra, F.; Poggi, G.; Verdoliva, L. Are GAN generated images easy to detect? A critical analysis of the state-of-the-art. In Proceedings of the 2021 IEEE International Conference on Multimedia and Expo (ICME), Shenzhen, China, 5–9 July 2021; pp. 1–6. [Google Scholar]
- Shao, R.; Lan, X.; Yuen, P.C. Joint discriminative learning of deep dynamic textures for 3D mask face anti-spoofing. IEEE Trans. Inf. Forensics Secur. 2018, 14, 923–938. [Google Scholar] [CrossRef]
- Aggarwal, A.; Kumar, M. Image surface texture analysis and classification using deep learning. Multimed. Tools Appl. 2021, 80, 1289–1309. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, Z.; Zhao, C.; Zhu, X.; Qin, Y.; Zhou, Q.; Zhou, F.; Lei, Z. Deep spatial gradient and temporal depth learning for face anti-spoofing. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5042–5051. [Google Scholar]
- Ramachandran, V.S. Perception of shape from shading. Nature 1988, 331, 163–166. [Google Scholar] [CrossRef]
- Woodham, R.J. Photometric method for determining surface orientation from multiple images. Opt. Eng. 1980, 19, 139–144. [Google Scholar] [CrossRef]
- Li, S.Z.; Zhang, L.; Liao, S.; Zhu, X.; Chu, R.; Ao, M.; He, R. A near-infrared image based face recognition system. In Proceedings of the 7th International Conference on Automatic Face and Gesture Recognition (FGR06), Southampton, UK, 10–12 April 2006; pp. 455–460. [Google Scholar]
- Li, S.Z.; Chu, R.; Liao, S.; Zhang, L. Illumination invariant face recognition using near-infrared images. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 627–639. [Google Scholar] [CrossRef]
- Peng, M.; Wang, C.; Chen, T.; Liu, G. Nirfacenet: A convolutional neural network for near-infrared face identification. Information 2016, 7, 61. [Google Scholar] [CrossRef]
- Ju, Y.; Shi, B.; Jian, M.; Qi, L.; Dong, J.; Lam, K.M. Normattention-psn: A high-frequency region enhanced photometric stereo network with normalized attention. Int. J. Comput. Vis. 2022, 130, 3014–3034. [Google Scholar] [CrossRef]
- Zhang, Z.; Yi, D.; Lei, Z.; Li, S.Z. Face liveness detection by learning multispectral reflectance distributions. In Proceedings of the 2011 IEEE International Conference on Automatic Face & Gesture Recognition (FG), Santa Barbara, CA, USA, 21–23 March 2011; pp. 436–441. [Google Scholar]
- Chan, P.P.; Liu, W.; Chen, D.; Yeung, D.S.; Zhang, F.; Wang, X.; Hsu, C.C. Face liveness detection using a flash against 2D spoofing attack. IEEE Trans. Inf. Forensics Secur. 2017, 13, 521–534. [Google Scholar] [CrossRef]
- Agarwal, A.; Yadav, D.; Kohli, N.; Singh, R.; Vatsa, M.; Noore, A. Face presentation attack with latex masks in multispectral videos. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 81–89. [Google Scholar]
- Zhou, C.; Han, G.; Via, B.K.; Song, Y.; Gao, S.; Jiang, W. Rapid identification of fibers from different waste fabrics using the near-infrared spectroscopy technique. Text. Res. J. 2019, 89, 3610–3616. [Google Scholar] [CrossRef]
- Eisenreich, N.; Rohe, T. Infrared spectroscopy in analysis of plastics recycling. In Encyclopedia of Analytical Chemistry: Applications, Theory and Instrumentation; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Kamitsos, E. Infrared spectroscopy of glasses. In Modern Glass Characterization; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2015; pp. 1–42. [Google Scholar]
- Green, R.O. Retrieval of reflectance from calibrated radiance imagery measured by the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) for lithological mapping of Clark Mountains, California. In Proceedings of the Annual JPL Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) Workshop, Mountain Pass, CA, USA, 4–5 June 1990; Volume 2. [Google Scholar]
- Man, K.; Ashdown, I. Accurate colorimetric feedback for RGB LED clusters. In Proceedings of the Sixth International Conference on Solid State Lighting, San Diego, CA, USA, 13–17 September 2006; Volume 6337, p. 633702. [Google Scholar]
- Basri, R.; Jacobs, D.W. Lambertian reflectance and linear subspaces. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 218–233. [Google Scholar] [CrossRef]
- Blackfly S USB3. 2022. Available online: https://www.flir.com/products/blackfly-s-usb3/?model=BFS-U3-51S5P-C&vertical=machine%2Bvision&segment=iis (accessed on 1 October 2022).
- Deng, J.; Guo, J.; Ververas, E.; Kotsia, I.; Zafeiriou, S. Retinaface: Single-shot multi-level face localisation in the wild. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 5203–5212. [Google Scholar]
- Ahonen, T.; Hadid, A.; Pietikainen, M. Face description with local binary patterns: Application to face recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 2037–2041. [Google Scholar] [CrossRef] [PubMed]
- van der Walt, S.; Schönberger, J.L.; Nunez-Iglesias, J.; Boulogne, F.; Warner, J.D.; Yager, N.; Gouillart, E.; Yu, T.; The Scikit-Image Contributors. Scikit-image: Image processing in Python. PeerJ 2014, 2, e453. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Ahmed, N.; Natarajan, T.; Rao, K.R. Discrete cosine transform. IEEE Trans. Comput. 1974, 100, 90–93. [Google Scholar] [CrossRef]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef]
- Simanjuntak, G.D.; Ramadhani, K.N.; Arifianto, A. Face spoofing detection using color distortion features and principal component analysis. In Proceedings of the 2019 7th International Conference on Information and Communication Technology (ICoICT), Kuala Lumpur, Malaysia, 24–26 July 2019; pp. 1–5. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- PyTorch Lightning. GitHub. 2019. Available online: https://github.com/PyTorchLightning/pytorch-lightning (accessed on 26 January 2023).
- Rössler, A.; Cozzolino, D.; Verdoliva, L.; Riess, C.; Thies, J.; Nießner, M. Faceforensics: A large-scale video dataset for forgery detection in human faces. arXiv 2018, arXiv:1803.09179. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Presentation | Ambient | Distance (Meters) | Yaw (deg) | Pitch (deg) |
|---|---|---|---|---|
| Live (30) | Dark, Lights, Sun * | [0.5, 1.5] | [−45, 45] | [−15, 15] |
| display-replay (30) | Dark, Lights, Sun * | [0.5, 1.5] | [−45, 45] | [−15, 15] |
| Paper Mask (30) | Dark, Lights, Sun * | [0.5, 1.5] | [−45, 45] | [−15, 15] |
| Spandex Mask (30) | Dark, Lights, Sun * | [0.5, 1.5] | [−45, 45] | [−15, 15] |
| Face-Print Covid Mask (30) | Dark, Lights, Sun * | [0.5, 1.5] | [−45, 45] | [−15, 15] |
| Algorithm | ACER | NPCER | APCER: | |||
|---|---|---|---|---|---|---|
| Paper | Spandex | COVID | Display | |||
| Det: LBP † | 3.6% | 4.9% | 6.4% | 0.2% | 0.0% | ND |
| Det: DCT | 9.8% | 17.6% | 1.0% | 5.2% | 0.0% | ND |
| Det: RCH | 14.9% | 23.3% | 11.5% | 4.6% | 0.0% | ND |
| Det: RFS | 50.1% | 99.9% | 0.4% | 0.1% | 0.1% | ND |
| Det 3D-Ensemble: LBP | 1.7% | 0.9% | 7.7% | 0.0% | 0.0% | ND |
| Det 3D-Ensemble: DCT | 3.8% | 3.8% | 2.2% | 8.4% | 0.5% | ND |
| Det 3D-Ensemble: RCH | 6.7% | 8.1% | 10.2% | 0.4% | 5.5% | ND |
| Det 3D-Ensemble: RFS | 24.8% | 31.0% | 17.0% | 17.0% | 22.0% | ND |
| DL Base: MobileNetV3 ‡ | 0.2% | 0.2% | 0.3% | 0.0% | 0.1% | ND |
| DL Base: InceptionNetV3 | 0.3% | 0.4% | 0.5% | 0.0% | 0.0% | ND |
| SOTA: Central-Difference Net | 0.5% | 0.4% | 1.6% | 0.0% | 0.0% | ND |
| SOTA: Spoof-Cues Net | 1.0% | 0.5% | 2.9% | 0.1% | 1.4% | ND |
| SOTA: Dual-Branch Depth Net | 1.3% | 0.6% | 3.2% | 0.1% | 2.2% | ND |
| Algorithm | ACER | NPCER | APCER: | |||
|---|---|---|---|---|---|---|
| Paper | Spandex | COVID | Display | |||
| Det: LBP † | 2.6% | 4.0% | 3.5% | 0.1% | 0.1% | ND |
| Det: DCT | 7.9% | 13.5% | 1.2% | 5.6% | 0.0% | ND |
| Det: RCH | 9.4% | 15.9% | 8.3% | 0.0% | 0.1% | ND |
| Det: RFS | 49.7% | 7.5% | 91.4% | 96.8% | 87.6% | ND |
| Det 3D-Ensemble: LBP | 1.6% | 2.4% | 1.9% | 0.2% | 0.1% | ND |
| Det 3D-Ensemble: DCT | 4.7% | 2.9% | 5.5% | 13.3% | 0.4% | ND |
| Det 3D-Ensemble: RCH | 6.7% | 10.6 % | 8.0% | 0.4% | 0.3% | ND |
| Det 3D-Ensemble: RFS | 50.0% | 99.9% | 0.1% | 0.2% | 0.1% | ND |
| DL Base: MobileNetV3 ‡ | 0.8% | 1.3% | 0.3% | 0.0% | 0.2% | ND |
| DL Base: InceptionNetV3 | 0.3% | 0.4% | 0.5% | 0.0% | 0.0% | ND |
| SOTA: Central-Difference Net | 1.1% | 1.8% | 1.3% | 0.0% | 0.0% | ND |
| SOTA: Spoof-Cues Net | 1.5% | 1.6% | 2.2% | 0.1% | 1.3% | ND |
| SOTA: Dual-Branch Depth Net | 1.9% | 2.0% | 2.8% | 0.0% | 1.9% | ND |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hassani, A.; Diedrich, J.; Malik, H. Monocular Facial Presentation–Attack–Detection: Classifying Near-Infrared Reflectance Patterns. Appl. Sci. 2023, 13, 1987. https://doi.org/10.3390/app13031987
Hassani A, Diedrich J, Malik H. Monocular Facial Presentation–Attack–Detection: Classifying Near-Infrared Reflectance Patterns. Applied Sciences. 2023; 13(3):1987. https://doi.org/10.3390/app13031987
Chicago/Turabian StyleHassani, Ali, Jon Diedrich, and Hafiz Malik. 2023. "Monocular Facial Presentation–Attack–Detection: Classifying Near-Infrared Reflectance Patterns" Applied Sciences 13, no. 3: 1987. https://doi.org/10.3390/app13031987
APA StyleHassani, A., Diedrich, J., & Malik, H. (2023). Monocular Facial Presentation–Attack–Detection: Classifying Near-Infrared Reflectance Patterns. Applied Sciences, 13(3), 1987. https://doi.org/10.3390/app13031987