Biofouling Removal Using a Novel Electronic System for Driving an Array of High Power Marinised Transducers



Abstract
:1. Introduction
2. Electrical Equipment and Assembly to Power the Transducer
2.1. Marinised Power Ultrasonic Transducers
2.2. Power Generator Specification
- Fixed power generation, 160 Wrms (or over 1400 W peak), with 300 Vpp (100 Vrms), 4.5 App (1.6 Arms, fuse protection) transducer drive capability.
- High power gain bandwidth (200 kHz)
- Module provides two single channels or one Bridge mode channel.
- Supports a step-up transformer to further increase voltage drive and isolation for transducers that require ground isolation to operate safely.
- System can drive any UT (Ultrasonic Transducers) at frequencies between 20–200 kHz.
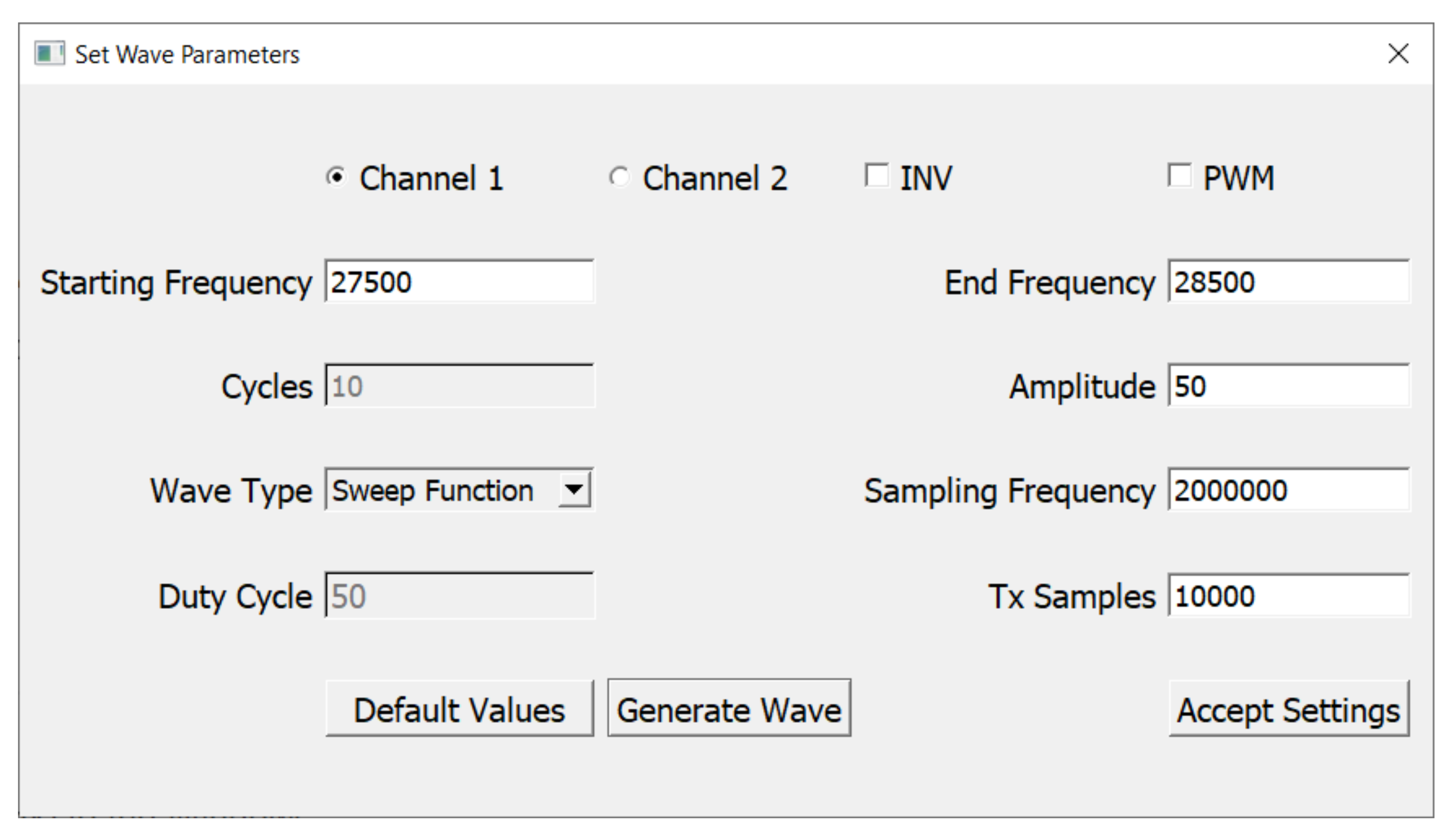
2.3. Signal Generator Specification
- Digital Signal Generators provide maximum flexibility like
- Dual independent signal output channels.
- Digitally synthesized waveforms for maximum flexibility.
- Uses 12-bit DACs running up to 2 MHz sampling frequency.
- Selection of any frequency (20–200 kHz)
- Sweep mode, any rate and frequency range.
- Pulse mode with duty cycle control for all signals generated.
- Arbitrary signal generation by importing synthesized signals from a file (useful for research purposes).
- Bespoke firmware supported by BIC and can be upgraded with new features and bug fixes.
2.4. Transducer Design Electrical Connection Precautions
3. Proposing a Sweep Sine to Cool down the Transducer Automatically
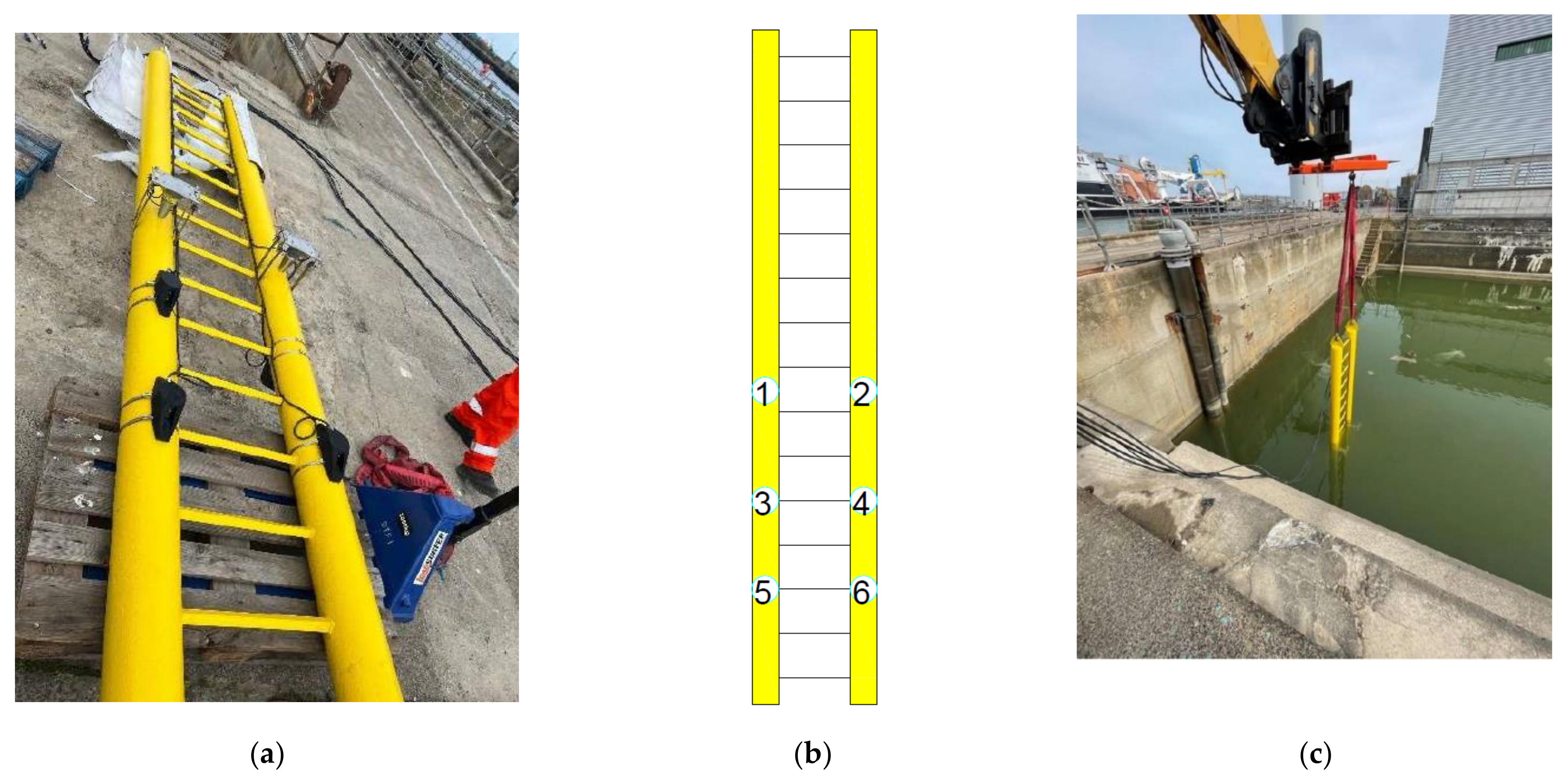
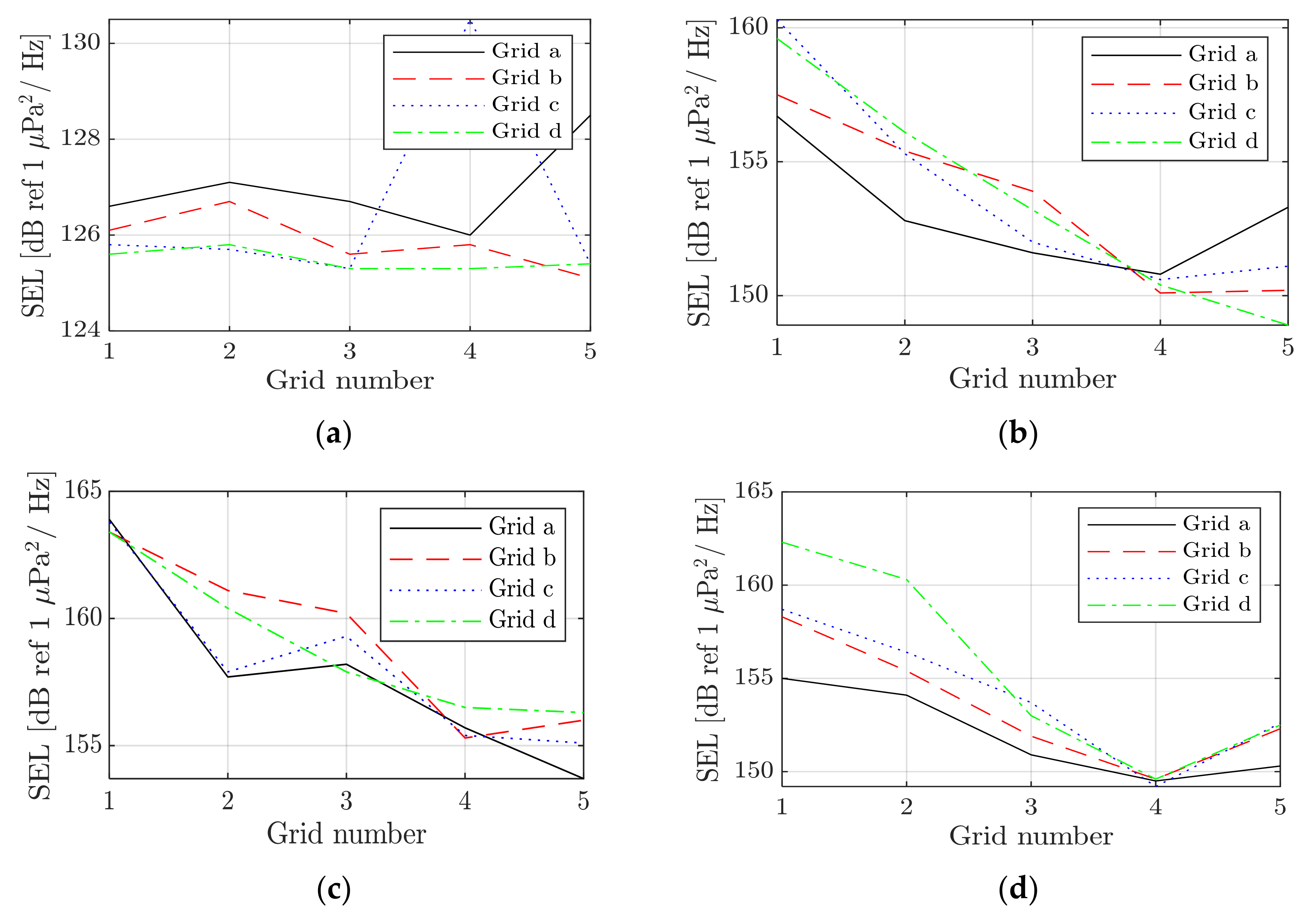
4. Noise Levels in the Ocean Generated by Horn and Non-Horn Marinised Transducers
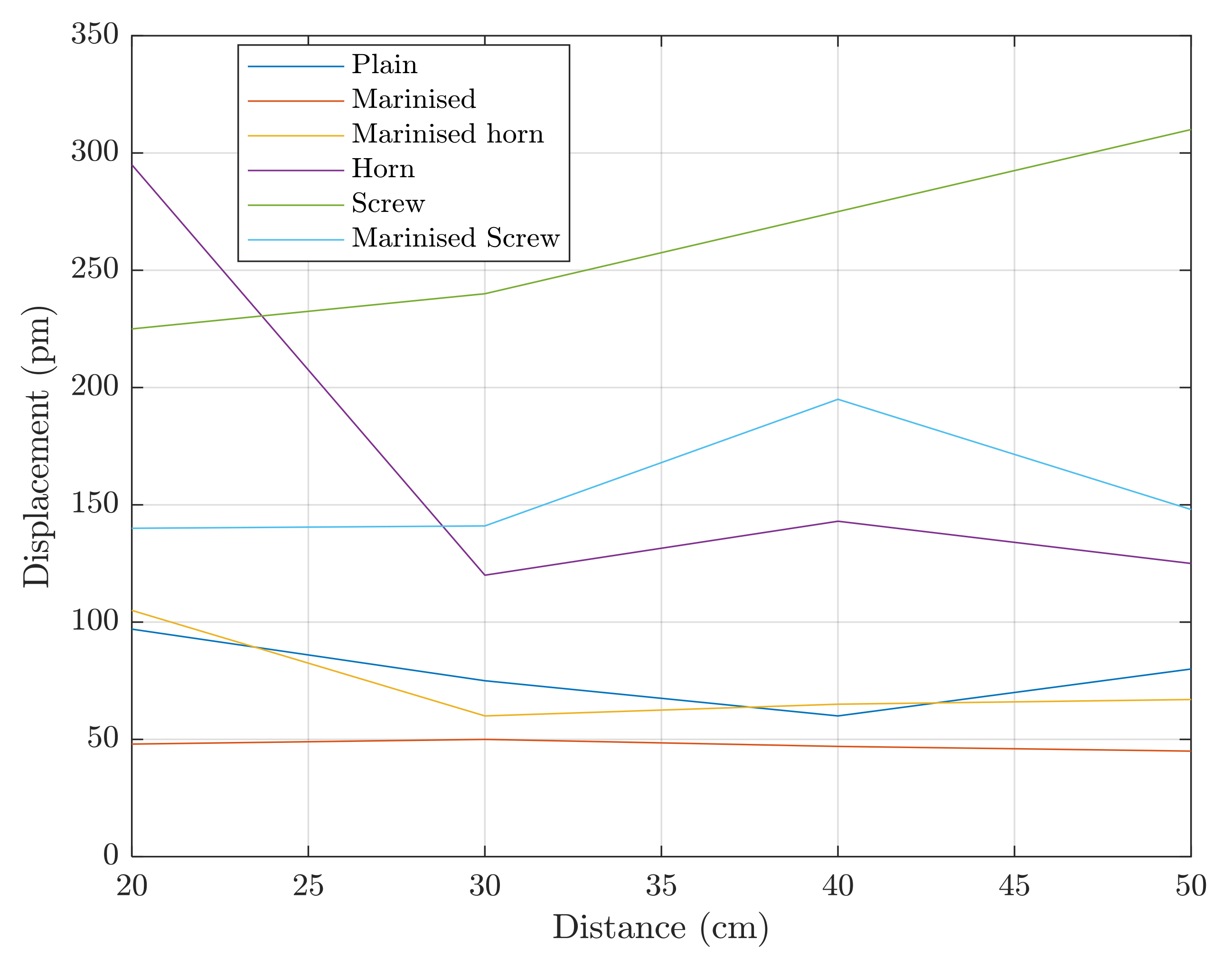
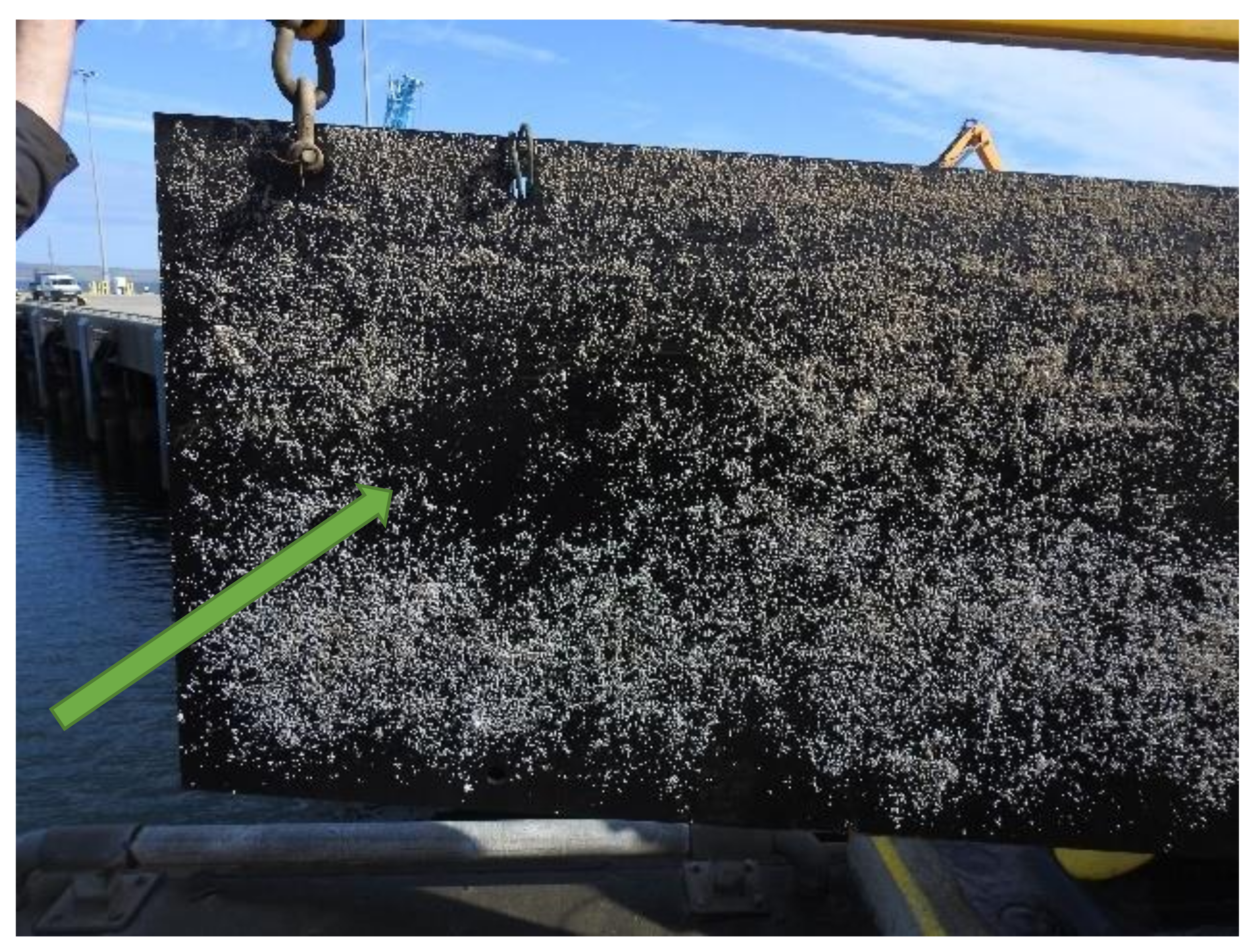
5. The Effect of HPUT Vibration on Removing Biofouling from a Plate
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alternative Methods for Environmentally Friendly Fouling Control. Available online: https://eurofishmagazine.com/sections/technology/item/676-alternative-methods-for-environmentally-friendly-fouling-control (accessed on 20 December 2022).
- Seo, E.; Lee, J.W.; Lee, D.; Seong, M.R.; Kim, G.H.; Hwang, D.S.; Lee, S.J. Eco-Friendly Erucamide–Polydimethylsiloxane Coatings for Marine Anti-Biofouling. Colloids Surf. B Biointerfaces 2021, 207, 112003. [Google Scholar] [CrossRef] [PubMed]
- Swain, G.W.; Nelson, W.G.; Preedeekanit, S. The Influence of Biofouling Adhesion and Biotic Disturbance on the Development of Fouling Communities on Non-toxic Surfaces. Biofouling 1998, 12, 257–269. [Google Scholar] [CrossRef]
- Hao, H.-H.; Liu, P.; Su, P.; Chen, T.; Zhu, M.; Jiang, Z.-B.; Li, J.-P.; Feng, D.-Q. Sea-Trial Research on Natural Product-Based Antifouling Paint Applied to Different Underwater Sensor Housing Materials. Int. Biodeterior. Biodegrad. 2022, 170, 105400. [Google Scholar] [CrossRef]
- Kalumuck, K.M.; Chahine, G.L.; Frederick, G.S.; Aley, P.D. Development of a DYNAJET Cavitating Water Jet Cleaning Tool for Underwater Marine Fouling Removal. In Proceedings of the 9th American Waterjet Conference, Dearborn, MI, USA, 23–26 August 1997. [Google Scholar]
- Ning, D.; Wang, Q.; Tian, J.; Gong, Y.; Du, H.; Chen, S.; Hou, J. Experimental Study on the Coating Removing Characteristics of High-Pressure Water Jet by Micro Jet Flow. Micromachines 2021, 12, 173. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Liu, Y.; Ma, C.; Muhammad, T.; Zhou, B.; Zhou, Y.; Song, P.; Li, Y. Using Electromagnetic Fields to Inhibit Biofouling and Scaling in Biogas Slurry Drip Irrigation Emitters. J. Hazard. Mater. 2021, 401, 123265. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Seo, Y.; Lin, Y.; Li, L.; Muhammad, T.; Ma, C.; Li, Y. Electromagnetic Fields for Biofouling Mitigation in Reclaimed Water Distribution Systems. Water Res. 2020, 173, 115562. [Google Scholar] [CrossRef]
- Guo, S.; Khoo, B.C.; Teo, S.L.M.; Lee, H.P. The Effect of Cavitation Bubbles on the Removal of Juvenile Barnacles. Colloids Surf. B Biointerfaces 2013, 109, 219–227. [Google Scholar] [CrossRef] [PubMed]
- Vyas, N.; Manmi, K.; Wang, Q.; Jadhav, A.J.; Barigou, M.; Sammons, R.L.; Kuehne, S.A.; Walmsley, A.D. Which Parameters Affect Biofilm Removal with Acoustic Cavitation? A Review. Ultrasound Med. Biol. 2019, 45, 1044–1055. [Google Scholar] [CrossRef]
- Louisnard, O.; González-García, J. Acoustic Cavitation. In Ultrasound Technologies for Food and Bioprocessing; Springer: Berlin/Heidelberg, Germany, 2011; pp. 13–64. [Google Scholar]
- Miller, M.W.; Miller, D.L.; Brayman, A.A. A Review of in vitro Bioeffects of Inertial Ultrasonic Cavitation from a Mechanistic Perspective. Ultrasound Med. Biol. 1996, 22, 1131–1154. [Google Scholar] [CrossRef]
- Ashokkumar, M. The Characterization of Acoustic Cavitation Bubbles–An Overview. Ultrason. Sonochem. 2011, 18, 864–872. [Google Scholar] [CrossRef]
- Mustonen, J.; Tommiska, O.; Holmström, A.; Rauhala, T.; Moilanen, P.; Gritsevich, M.; Salmi, A.; Hæggström, E. FEM-Based Time-Reversal Enhanced Ultrasonic Cleaning. Ultrason. Sonochem. 2021, 79, 105798. [Google Scholar] [CrossRef]
- Church, C.C.; Carstensen, E.L. “Stable” Inertial Cavitation. Ultrasound Med. Biol. 2001, 27, 1435–1437. [Google Scholar] [CrossRef] [PubMed]
- Fuchs, F.J. 19-Ultrasonic Cleaning and Washing of Surfaces. In Power Ultrasonics; Gallego-Juárez, J.A., Graff, K.F., Eds.; Woodhead Publishing: Oxford, UK, 2015; pp. 577–609. ISBN 978-1-78242-028-6. [Google Scholar]
- Aktij, S.A.; Taghipour, A.; Rahimpour, A.; Mollahosseini, A.; Tiraferri, A. A Critical Review on Ultrasonic-Assisted Fouling Control and Cleaning of Fouled Membranes. Ultrasonics 2020, 108, 106228. [Google Scholar] [CrossRef] [PubMed]
- Rassweiler, J.J.; Knoll, T.; Köhrmann, K.-U.; McAteer, J.A.; Lingeman, J.E.; Cleveland, R.O.; Bailey, M.R.; Chaussy, C. Shock Wave Technology and Application: An Update. Eur. Urol. 2011, 59, 784–796. [Google Scholar] [CrossRef] [Green Version]
- Lais, H.; Lowe, P.S.; Gan, T.-H.; Wrobel, L.C. Numerical Investigation of Design Parameters for Optimization of the In-Situ Ultrasonic Fouling Removal Technique for Pipelines. Ultrason. Sonochem. 2019, 56, 94–104. [Google Scholar] [CrossRef]
- Agarwal, A.; Jern Ng, W.; Liu, Y. Removal of Biofilms by Intermittent Low-Intensity Ultrasonication Triggered Bursting of Microbubbles. Biofouling 2014, 30, 359–365. [Google Scholar] [CrossRef] [PubMed]
- Lais, H.; Lowe, P.S.; Wrobel, L.C.; Gan, T.-H. Investigation of Ultrasonic Sonotrode Design to Improve the Performance of Ultrasonic Fouling Removal. IEEE Access 2019, 7, 148897–148912. [Google Scholar] [CrossRef]
- da Cunha, T.V.; Bohórquez, C.E.N. Ultrasound in Arc Welding: A Review. Ultrasonics 2015, 56, 201–209. [Google Scholar] [CrossRef]
- Teyeb, A.; Silva, J.; Kanfoud, J.; Carr, P.; Gan, T.-H.; Balachandran, W. Improvements in the Microstructure and Mechanical Properties of Aluminium Alloys Using Ultrasonic-Assisted Laser Welding. Metals 2022, 12, 1041. [Google Scholar] [CrossRef]
- Teyeb, A.; Salimi, M.; el Masri, E.; Balachandran, W.; Gan, T.-H. Analytical Simulation of the Microbubble Collapsing in a Welding Fusion Pool. Materials 2023, 16, 410. [Google Scholar] [CrossRef]
- Mason, T.J. Industrial Sonochemistry: Potential and Practicality. Ultrasonics 1992, 30, 192–196. [Google Scholar] [CrossRef]
- Harvey, G.; Gachagan, A.; Mutasa, T. Review of High-Power Ultrasound-Industrial Applications and Measurement Methods. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2014, 61, 481–495. [Google Scholar] [CrossRef] [Green Version]
- Escrig, J.; Woolley, E.; Rangappa, S.; Simeone, A.; Watson, N.J. Clean-in-Place Monitoring of Different Food Fouling Materials Using Ultrasonic Measurements. Food Control 2019, 104, 358–366. [Google Scholar] [CrossRef]
- Kumar, S.; Wu, C.S.; Padhy, G.K.; Ding, W. Application of Ultrasonic Vibrations in Welding and Metal Processing: A Status Review. J. Manuf. Process. 2017, 26, 295–322. [Google Scholar] [CrossRef]
- Gallego-Juarez, J.A. High-Power Ultrasonic Processing: Recent Developments and Prospective Advances. Phys. Procedia 2010, 3, 35–47. [Google Scholar] [CrossRef] [Green Version]
- Saalbach, K.-A.; Twiefel, J.; Wallaschek, J. Self-Sensing Cavitation Detection in Ultrasound-Induced Acoustic Cavitation. Ultrasonics 2019, 94, 401–410. [Google Scholar] [CrossRef]
- Uchida, T.; Sato, H.; Takeuchi, S.; Kikuchi, T. Investigation of Output Signal from Cavitation Sensor by Dissolved Oxygen Level and Sonochemical Luminescence. Jpn. J. Appl. Phys. 2010, 49, 07HE03. [Google Scholar] [CrossRef]
- Uchida, T.; Takeuchi, S.; Kikuchi, T. Measurement of Amount of Generated Acoustic Cavitation: Investigation of Spatial Distribution of Acoustic Cavitation Generation Using Broadband Integrated Voltage. Jpn. J. Appl. Phys. 2011, 50, 07HE01. [Google Scholar] [CrossRef]
- Nguyen, T.T.; Asakura, Y.; Koda, S.; Yasuda, K. Dependence of Cavitation, Chemical Effect, and Mechanical Effect Thresholds on Ultrasonic Frequency. Ultrason. Sonochem. 2017, 39, 301–306. [Google Scholar] [CrossRef]
- Heikkola, E.; Miettinen, K.; Nieminen, P. Multiobjective Optimization of an Ultrasonic Transducer Using NIMBUS. Ultrasonics 2006, 44, 368–380. [Google Scholar] [CrossRef]
- Lin, S.; Xu, L.; Wenxu, H. A New Type of High Power Composite Ultrasonic Transducer. J. Sound Vib. 2011, 330, 1419–1431. [Google Scholar] [CrossRef]
- Zhong, X.; Dong, J.; Liu, M.; Meng, R.; Li, S.; Pan, X. Experimental Study on Ship Fouling Cleaning by Ultrasonic-Enhanced Submerged Cavitation Jet: A Preliminary Study. Ocean Eng. 2022, 258, 111844. [Google Scholar] [CrossRef]
- Mazue, G.; Viennet, R.; Hihn, J.Y.; Carpentier, L.; Devidal, P.; Albaïna, I. Large-Scale Ultrasonic Cleaning System: Design of a Multi-Transducer Device for Boat Cleaning (20 KHz). Ultrason. Sonochem. 2011, 18, 895–900. [Google Scholar] [CrossRef]
- Guo, S.; Lee, H.P.; Teo, S.L.M.; Khoo, B.C. Inhibition of Barnacle Cyprid Settlement Using Low Frequency and Intensity Ultrasound. Biofouling 2012, 28, 131–141. [Google Scholar] [CrossRef] [PubMed]
- Scherba, G.; Weigel, R.M.; O’Brien Jr, W.D. Quantitative Assessment of the Germicidal Efficacy of Ultrasonic Energy. Appl. Environ. Microbiol. 1991, 57, 2079–2084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, T.J.; Nakano, K.; Matsumara, M. Ultrasonic Irradiation for Blue-Green Algae Bloom Control. Environ. Technol. 2001, 22, 383–390. [Google Scholar] [CrossRef] [PubMed]
- McKenna, M.F.; Gabriele, C.; Kipple, B. Effects of Marine Vessel Management on the Underwater Acoustic Environment of Glacier Bay National Park, AK. Ocean Coast Manag. 2017, 139, 102–112. [Google Scholar] [CrossRef]
- Tyack, P.L. Implications for Marine Mammals of Large-Scale Changes in the Marine Acoustic Environment. J. Mammal. 2008, 89, 549–558. [Google Scholar] [CrossRef] [Green Version]
- Lais, H.; Lowe, P.S.; Kanfoud, J.; Gan, T.-H. Application of High Power Ultrasonics for Fouling Removal in Submerged Structures. In Proceedings of the OCEANS 2017, Aberdeen, UK, 19–22 June 2017; pp. 1–8. [Google Scholar]
- Sullivan, K.D. Technical Guidance for Assessing the Effects of Anthropogenic Sound on Marine Mammal Hearing: Underwater Acoustic Thresholds for Onset of Permanent and Temporary Threshold Shifts. National Marine Fisheries Service, Office of Protected Resources: Washington, DC, USA,, 2016; Volume 178. [Google Scholar] [CrossRef]
- Available online: https://www.bjultrasonic.com/category/ultrasonic-transducer/ (accessed on 9 January 2023).
- Legg, M.; Yücel, M.K.; de Carellan, I.G.; Kappatos, V.; Selcuk, C.; Gan, T.H. Acoustic Methods for Biofouling Control: A Review. Ocean Eng. 2015, 103, 237–247. [Google Scholar] [CrossRef]
- Aganin, A.A.; Ilgamov, M.A.; Kosolapova, L.A.; Malakhov, V.G. Dynamics of a Cavitation Bubble near a Solid Wall. Thermophys. Aeromech. 2016, 23, 211–220. [Google Scholar] [CrossRef]
- Fisher, F.H.; Simmons, V.P. Sound Absorption in Sea Water. J. Acoust. Soc. Am. 1977, 62, 558–564. [Google Scholar] [CrossRef]
- Warburton, G.B. The Vibration of Rectangular Plates. Proc. Inst. Mech. Eng. 1954, 168, 371–384. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stage Number | Max SEL (dB) ref 1 μPa | Min SEL (dB) ref 1 μPa | Max SPL (dB) ref 1 μPa | Min SPL (dB) ref 1 μPa |
|---|---|---|---|---|
| 1 | 160.3 (dB)—grid point 1 c | 148.9 (dB)—grid point 5d | 142.5 (dB)—grid 1c | 131.1—grid point 5d |
| 2 | 163.9 (dB)—grid point 1a | 155.1 (dB)—grid point 5c | 146.7 (dB)—grid 1 a | 137.4 (dB)—grid point 5c |
| 3 | 162.3 (dB)—grid point 1d | 149.2 (dB)—grid point 4c | 144.5 (dB)—grid 1 d | 131.4 (dB)—grid point 4c |
| 4 | 163.4 (dB)—grid point 1a and 1c | 152.4 (dB)—grid point 4a | 145.6 (dB)—grid 1 a and c | 134.7 (dB)—grid point 4a |
| 5 | 167.7 (dB)—grid point 1d | 158.7 (dB)—grid point 5a | 149.9 (dB)—grid 1 d | 140.9 (dB)—grid point 5a |
| 6 | SEL: 166.1 (dB)—grid point 1c | 153.4 (dB)—grid point 5a | 148.3 (dB)—grid 1c | 135.6 (dB)—grid point 5a |
| 7 | SEL: 169.4 (dB)—grid point 1d | 159 (dB)—grid point 4a and 5a | 151.6 (dB)—grid 1 d | 141.2 (dB)—grid point 4a and 5a |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Salimi, M.; Livadas, M.; Teyeb, A.; El Masri, E.; Gan, T.-H. Biofouling Removal Using a Novel Electronic System for Driving an Array of High Power Marinised Transducers. Appl. Sci. 2023, 13, 3749. https://doi.org/10.3390/app13063749
Salimi M, Livadas M, Teyeb A, El Masri E, Gan T-H. Biofouling Removal Using a Novel Electronic System for Driving an Array of High Power Marinised Transducers. Applied Sciences. 2023; 13(6):3749. https://doi.org/10.3390/app13063749
Chicago/Turabian StyleSalimi, Mohamad, Makis Livadas, Ahmed Teyeb, Evelyne El Masri, and Tat-Hean Gan. 2023. "Biofouling Removal Using a Novel Electronic System for Driving an Array of High Power Marinised Transducers" Applied Sciences 13, no. 6: 3749. https://doi.org/10.3390/app13063749
APA StyleSalimi, M., Livadas, M., Teyeb, A., El Masri, E., & Gan, T. -H. (2023). Biofouling Removal Using a Novel Electronic System for Driving an Array of High Power Marinised Transducers. Applied Sciences, 13(6), 3749. https://doi.org/10.3390/app13063749