1. Introduction
It is widely reported that high backfill slopes are damaged by rainfall and they significantly endanger people’s lives and property [
1,
2,
3,
4]. With the rapid growth of the economy and fast urbanization process of China in the past decades, the demand for the expansion and/or renewal of transportation infrastructures (e.g., highways, railways, and airports) has increasingly grown. To shorten the commuting distance, some transportation infrastructures have to be constructed in mountainous areas; as a result, a large number of high slopes due to excavation and backfill construction emerge. This gives rise to some critical geotechnical problems, e.g., excessive total and differential settlement, and slope failure. Meanwhile, rainfall is abundant in some regions; for example, it is commonly over 1500 mm a year in the east coast area of China. The seepage and infiltration of rainfall into the soil make the performance of high backfill slopes more complex. Under the influence of rainfall, the mechanical properties of the slope mass tend to be weak, such as the shear strength, matric suction, and modulus, which brings further challenges to engineers in predicting the stability of the slope [
5,
6,
7,
8,
9,
10].
Previous studies found that rainfall significantly affects the performance of the slope [
11,
12,
13,
14]. Wu et al. [
15] conducted model tests to quantify the loess soil slopes undergoing failure due to rainfall, which may cause multi-sliding retrogressive landslides. Li et al. [
16] carried out a hazard assessment of rainfall-induced debris landslides, and pointed out that the rainfall duration corresponding to the initiation of the debris landslide was exponentially related to the rainfall intensity. Meanwhile, some theoretical analyses, such as the limit equilibrium analysis and numerical simulation, were conducted to investigate the fracture evolution characteristics and failure mode of the slope [
17,
18,
19,
20]. Liu et al. [
21] investigated the progressive development of rainfall-induced landslides using the random finite element and material point methods with hydro-mechanical coupling.
In addition, machine learning techniques, such as neural networks, data mining techniques, BP algorithms, etc., have been increasingly adopted to assess the stability of slopes [
22,
23,
24,
25,
26,
27]. Based on neural networks, Du et al. [
28], Liu et al. [
29], and Cao et al. [
30] proposed a displacement prediction and early warning system for landslides. Chen et al. [
31] and Leonarduzzi et al. [
32] applied data mining techniques to plot landslide susceptibility mapping so that more landslide-related parameters were considered, including the slope angle, slope aspect, plan curvature, rainfall threshold, etc. Panda et al. [
33] proposed a new BP algorithm for achieving a better prediction of the slope. However, machine learning has seldom been adopted for assessing high backfill slopes in practice.
This study is aimed at investigating the stability of high backfill slopes moisturized by rainfall. A series of model tests were carried out under a plane strain condition considering the influences of rainfall duration and intensity. The slope displacements and moisture content in the backfill mass were monitored during the test. Based on the model tests, a numerical analysis was adopted to extend the analysis cases, and a machine learning method was used to develop a prediction method for the stability of high backfill slopes considering the effects of rainfall duration and intensity.
2. Model Test Preparation and Program
2.1. Test Setup
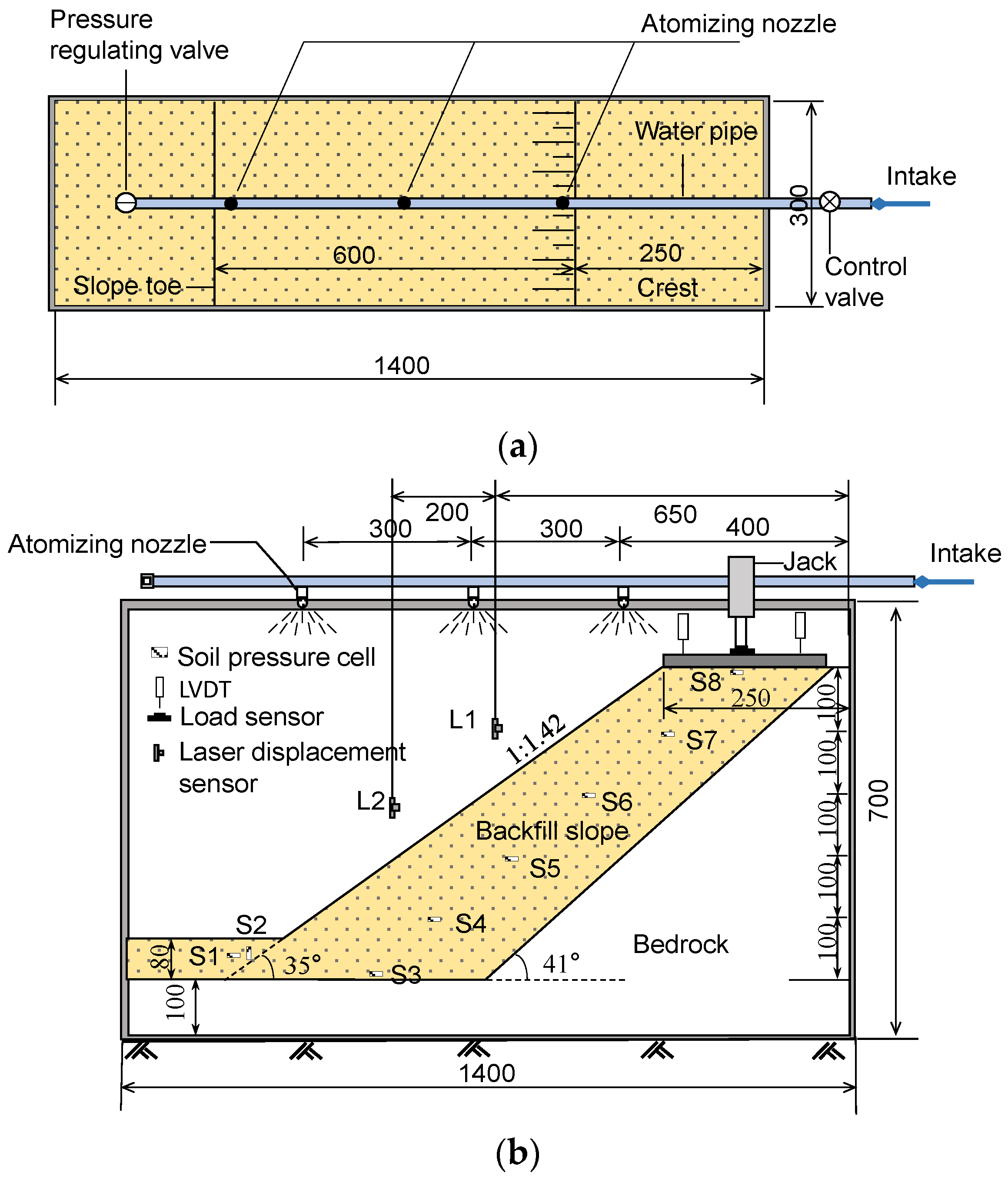
Figure 1 presents the schematic of the model test. The model box had inside dimensions of 1400 mm long, 700 mm high, and 300 mm wide, and was made of double-layer toughened glass plates to allow the visual observation and photogrammetry of the model slope during the test. The model box was fixed by steel frames to minimize its lateral deformations. To minimize the side effect due to the friction of the side walls of the box, a thin layer of Vaseline was smeared on the inside of the side walls.
The model bedrock slope with a slope angle of 41° was made of wood. Waterproof glue was spread on the boundary of the model bedrock contacting with the side walls of the model box to prevent water leakage. A backfill slope with a slope angle of 35° and a crest of 350 mm was constructed adjacent to the bedrock slope. A loading plate with dimensions of 290 mm long, 200 mm wide, and 15 mm thick was placed on the top of the backfill slope. A hydraulic jack was connected to the loading plate, which was used to apply an external load on the top surface of the backfill slope. An artificial rainfall device containing three atomizing nozzles was installed directly over the model box to achieve modeling of rainfall in this study. The rainfall intensity can be simply controlled by manually adjusting the valve.
2.2. Materials and Preparation
Considering the sizes of the model test, this study selected a scale ratio of 1/40 to a typical prototype size. This study mainly paid close attention to the similarities of the backfill properties, including the strength and permeability. The model backfill soil was made of a mixture of quartz sand, nano-bentonite, and expanded polystyrene (EPS) particles. The quartz sand had a particle size range of 0.5 mm to 4 mm, and the non-uniformity coefficient Cu and the curvature coefficient Cu were 3.64 and 0.98, respectively. The EPS particles had a particle size range of 1 mm to 2 mm. The quartz sands were mixed with nano-bentonite according to a mass ratio of 7:3, and the mixture was then mixed with the EPS particles according to the volume ratio of 10:1. The inclusion of EPS particles can adjust the compressibility of soil. As the water content of the backfill changes due to rainfall, a series of laboratory tests were conducted to obtain the physical–mechanical properties of the artificial soils with different water contents.
Table 1 summarizes the main properties of the soils. Clearly, the shear strength properties and modulus decreased with the increase of the water content. The prepared backfill can reflect the material properties weakened by the seepage and infiltration of rainfall. The permeability of the soil under the saturated condition was 1.3 × 10
−7 m/s, obtained from a falling-head permeability test, which is in the same order of magnitude as the protype.
In the model tests, the soils with a water content of 5% were prepared. Semi-resin alumina sandpaper was pasted on the slope side of the mode bedrock to increase the roughness of the bedrock surface. The interface shear test showed the interfacial frictional angle of 32.3° and cohesion of 9.1 kPa for the interface between the bedrock and the backfill. A 50 mm-thick soil layer was compacted on the base of bedrock. To better control the manufacture of backfill slope, a wooden facing plate with an inclination angle of 60° was installed in front of the backfill slope, and then the weighted backfill soils were gently placed into the channel between the bedrock and the facing plate. The soils were compacted manually by a steel hammer to a relative density of 80% with a lift thickness of 50 mm up to the desired slope height. The compaction was controlled by the mass and volume in each lift. After the backfills in the channel were complete, the facing plate was removed, and the desired slope shape with a slope angle of 35° and a crest of 350 mm wide were carefully trimmed.
2.3. Testing Program and Monitoring Plan
This study mainly considered the influence of rain on the stability of high backfill slopes. Rainfall intensities of 0.2 mm/h and 4 mm/h were considered, which correspond to light rain and heavy rain in the prototype [
31]. Rainfall durations of 0.5 h and 1 h were considered.
Table 2 shows the model test program.
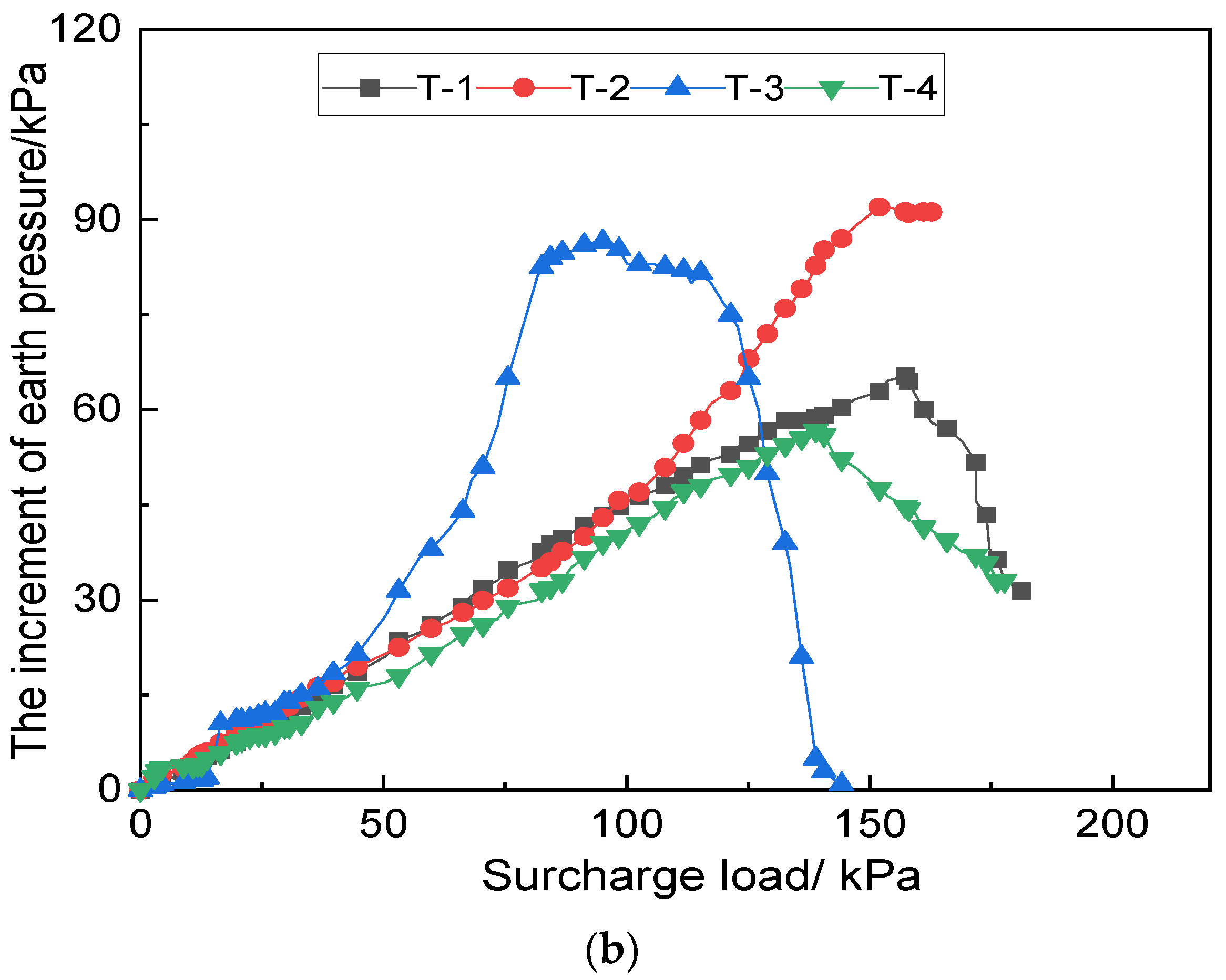
Figure 1 also includes the layout of the monitoring instruments in the model test. In this study, the displacements, earth pressures, and water contents of the backfill were measured. The load sensors were placed right below the jack to measure the applied load. Six earth pressure cells were installed along the centerline of the backfill slope to measure the vertical soil stress, and two were installed at the toe of the slope to measure the horizontal and vertical soil stresses, respectively. Two linear variable displacement transducers (LVDT) were installed at the slope shoulder to measure the vertical displacements, and two laser displacement censers were installed above the slope surface to measure the lateral displacements. A soil moisture sensor was used to measure the soil moisture content in the backfill slope after the rain. A data logger device was used to record the test data in real time. A Canon 6D digital camera was fixed on the cross section to take high-definition photos during the test, so, as with the displacement field, the cross section of the backfill slope can be obtained with the particle image velocimetry (PIV) technique.
In each model test, after manufacturing the model test and leaving to rest for 24 h, the artificial rainfall device was started up according to the planned rain intensity and duration. A soil moisture sensor was used to record the soil moisture content near the slope surface. A loading device applied a load on the top of the slope crest with a gradual increase of 1.7 kPa (kiloPascals) per second until the slope eventually failed. The displacements and earth pressures were monitored, and the pictures were taken four times a second in the loading process. After the test, the backfills were carefully excavated with a layer of 50 mm, and the soil moisture content in the internal zone of the backfill slope were recorded.
4. Model Base Establishment
To further investigate the influence of rainfall on the stability of the backfill slope, a numerical analysis incorporated in the software Geostudio was adopted in this study. The numerical simulation has the advantages of high efficiency, safety, and good repeatability. It can freely consider different conditions as compared with the physical model test. Test T-2 was used to calibrate the numerical model, including the relationship of the mass moisture content with the matric suction and permeability of the backfill soil [
33]. Adopting the rest model tests T-1, T-3, and T-4 to validate a numerical model is a great step towards ensuring the accuracy and reliability of the simulation results. Accordingly, a large number of model bases were established considering the different surcharges, and the rainfall intensity and duration were established.
A two-dimensional numerical model with the same geometry as test T-2 was created. The backfill slope was modeled as Mohr–Coulomb failure criteria, and the material properties are as shown in
Table 1. The bottom boundary was fixed in both the horizontal and vertical directions. The lateral displacements on the side boundaries were set to zero but the vertical movement was free. A rainfall boundary condition was set along the slope surface with a rainfall intensity of 4 mm/h. The Fredlund–Xing method was adopted to estimate the functions of the mass moisture content with the matric suction and permeability. After the simulation of rainfall, the Morgenstern–Price method was adopted to calculate the stability of the slope under the determined instability critical surcharge from the model test.
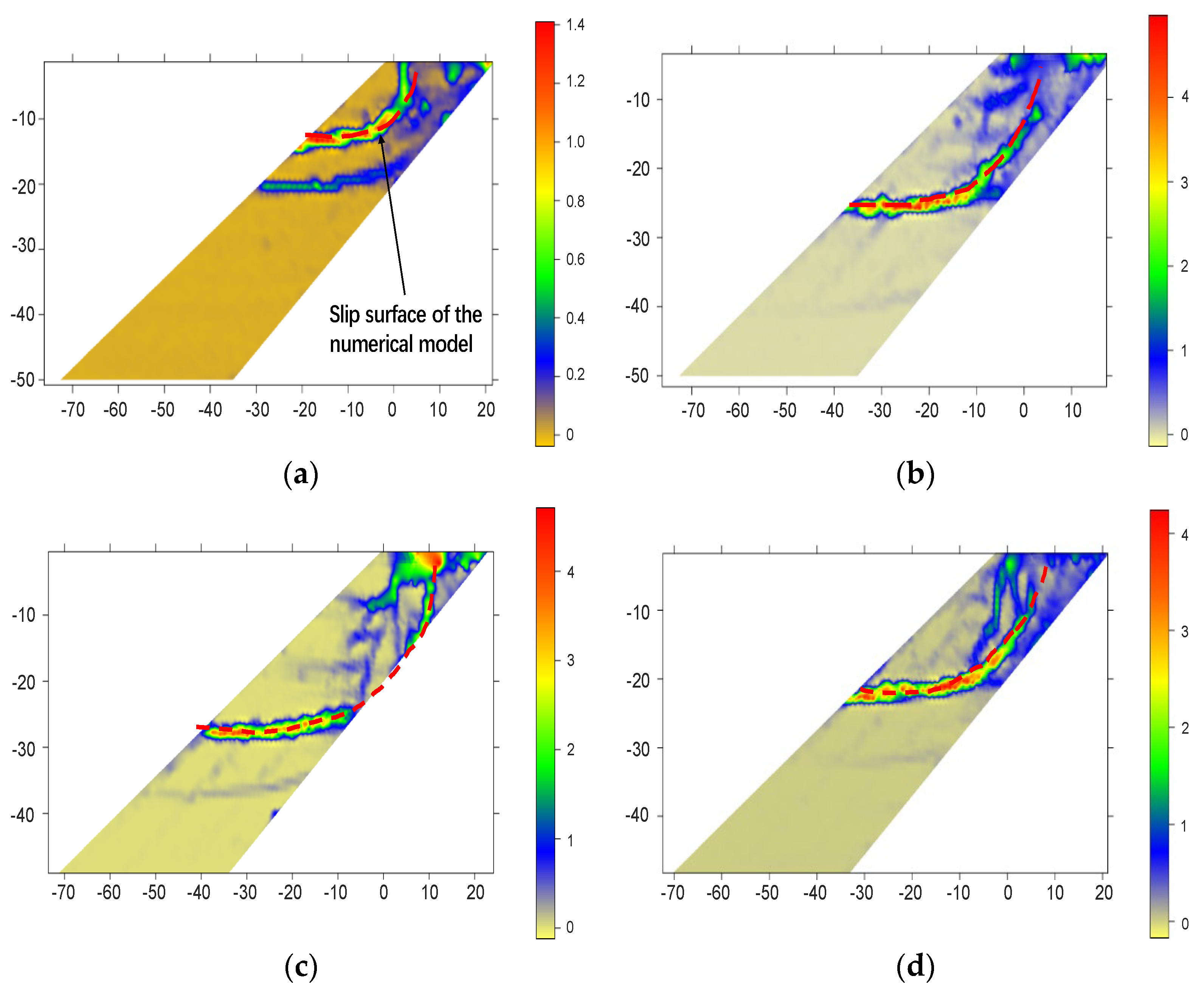
Figure 8b includes the calculated slip plane by the numerical analysis.
Table 4 summarizes the calculated displacements of the backfill slope and factor of safety. It is indicated that the results by the calibrated numerical model T-2 agreed well with the model test. The calibrated model was used to further predict the stability of the tests T-1, T-3, and T-4. The numerical model had the same geometry, displacement boundary condition, and material properties instead of the rainfall boundary. As seen from
Figure 8 and
Table 4, the results of the numerical analysis were in good agreement with the model tests.
Based on the calibrated model, a model base including 112 cases was established, considering the factors of surcharge load and rainfall intensity and duration, as listed in
Table 5. The rain duration changes from 0 to 9 h. The rain intensity varies from 0.65 to 4.0 mm/h, which refers to the rain intensity changing from light rain to heavy rain in the prototype.
4.1. Model Establishment and Training
This study adopted the BP neural network to evaluate the stability of the backfill slope. The BP neural network adopts error backpropagation and signal forward propagation and continuously adjusts the threshold and weight of the network to minimize the error [
35,
36]. The BP neural network structure contains the input layer, hidden layer, and output layer. In this study, the surcharge load, and rainfall intensity and duration were the input layer, and the factor of safety was the output layer. The values of the 116 cases were normalized to values between [−1, 1] using the mapminmax function to make the network converge quickly. Normalization can prevent the phenomenon of neuron output saturation due to the tremendous absolute value of the input.
Among the cases, 102 cases were randomly selected as the training set, and the remaining 10 cases were the testing set. The
newff function was adopted to create a BP neural network for the backpropagation algorithm:
in which
P is the input vector,
T is the target vector, and
S is the number of neurons in the hidden layer.
P is a matrix of R × Q1. In the created neural network, there are R neurons in the input layer, and each row corresponds to the typical value of the input data of a neuron.
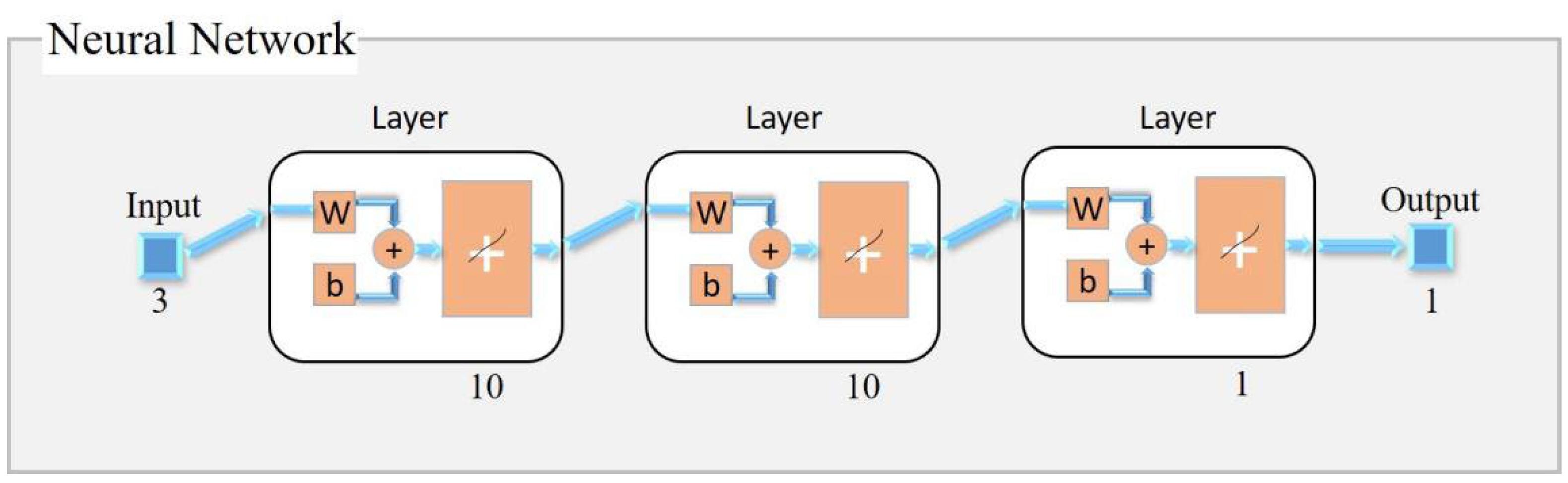
T is a matrix of SN × Q2. The network has SN output layer nodes, and each row is a typical value of the output value. In this study, the training was set to have two hidden layers, and the number of neurons in the output layer was 10. The sigmoid function was selected as the transmission function of the neurons in both the hidden layer and the output layer, and the sigmoid function can prevent the phenomenon of neuron output saturation caused by the excessive net input absolute value. The traingdx function was selected as the training function of the backpropagation algorithm because that updates the weight and bias values according to the gradient descent momentum and an adaptive learning rate. It will return a trained net and the training record, and the learngdm function is adopted as the gradient descent learning function with an additional momentum factor.
Figure 9 shows the final radial basis network structure.
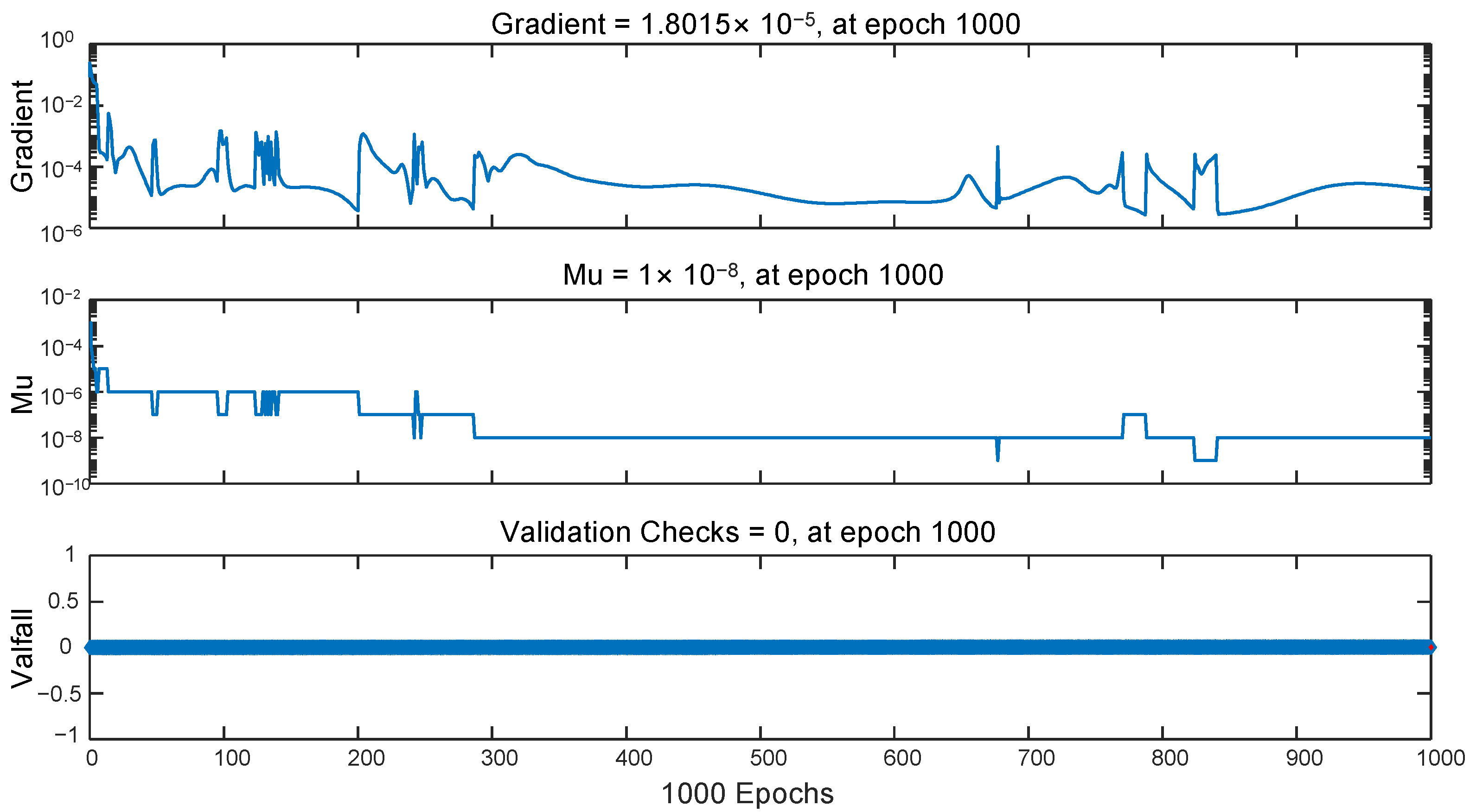
The maximum training times of the network were set to 1000 times with the target error tolerance of 0.01, the learning rate of 0.001, and the displayed interval times of 10.
Figure 10 shows the training state based on the BP neural network.
4.2. Model Testing
Table 6 shows the testing results of the 10 cases by the trained model. The factors of safety predicted by the trained BP neural network were close to the ideal output values. The average relative error of 1.02% and the goodness of fitness of 0.999 for the BP model indicate a good prediction effect.
The trained BP neural network model was further used to predict the stability of the four physical model tests.
Table 7 shows the predicted factors of safety for the model tests. It can be seen that the predicted safety factors of the four tests are all less than 1.1, indicating that the slope was under a critical state, which was consistent with the test.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}