

Robust Algorithm Software for NACA 4-Digit Airfoil Shape Optimization Using the Adjoint Method

 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Bibliographic Review
3. Methodology
3.1. Geometry Generation of the NACA Four-Digit Airfoil
3.2. Adjoint Equation
3.3. Adjoint Equation for Viscous Flow
3.4. Optimization Algorithm
- Step 1: The initial step involves defining the initial parameters for the algorithm, which initiates the primary optimization loop.
- Step 2: The flow field equations are solved to obtain a reliable solution. AUSM+ [27] was employed to compute the flow field variables that will be utilized in subsequent steps.
- Step 3: The adjoint equation is formulated and solved by the algorithm. The algorithm reconstructs the adjoint equation using the flow field variables.
- Step 4: The boundary geometry is deformed in the direction of the maximum steepest descent, adhering to the NACA standard. After observing the trend of movement of the boundary geometry, the shape of the airfoil is altered to approach the optimal condition.
- The field mesh is reproduced, and the algorithm returns to Step 1 to attain the minimum-cost function. In each iteration, the shape undergoes modifications, and a new mesh is produced at the field boundary.
4. Results
4.1. Study Case Selection
4.2. Adjoint Sensitivity and Parameter Changing Range
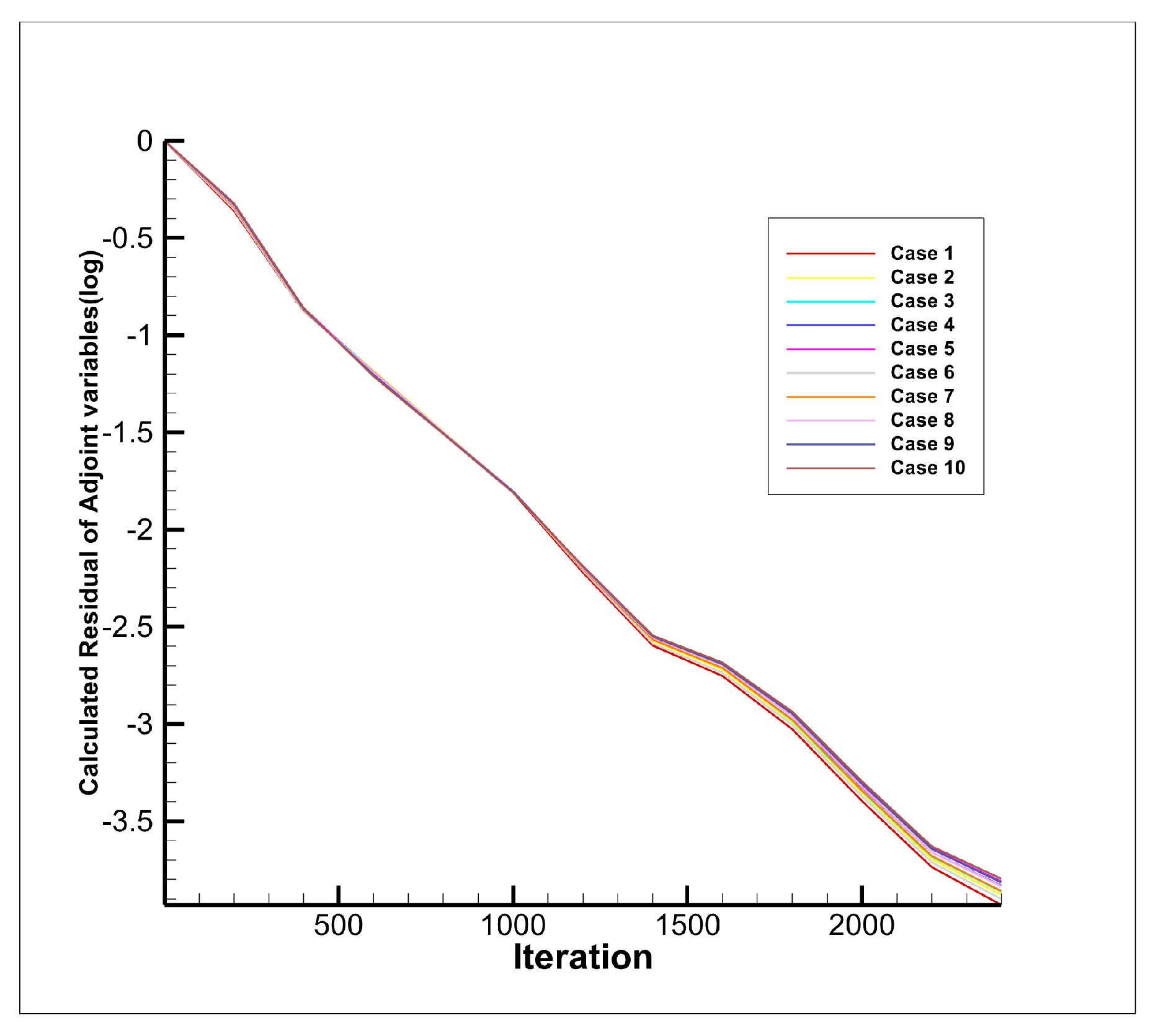
4.3. Grid Convergence Analysis
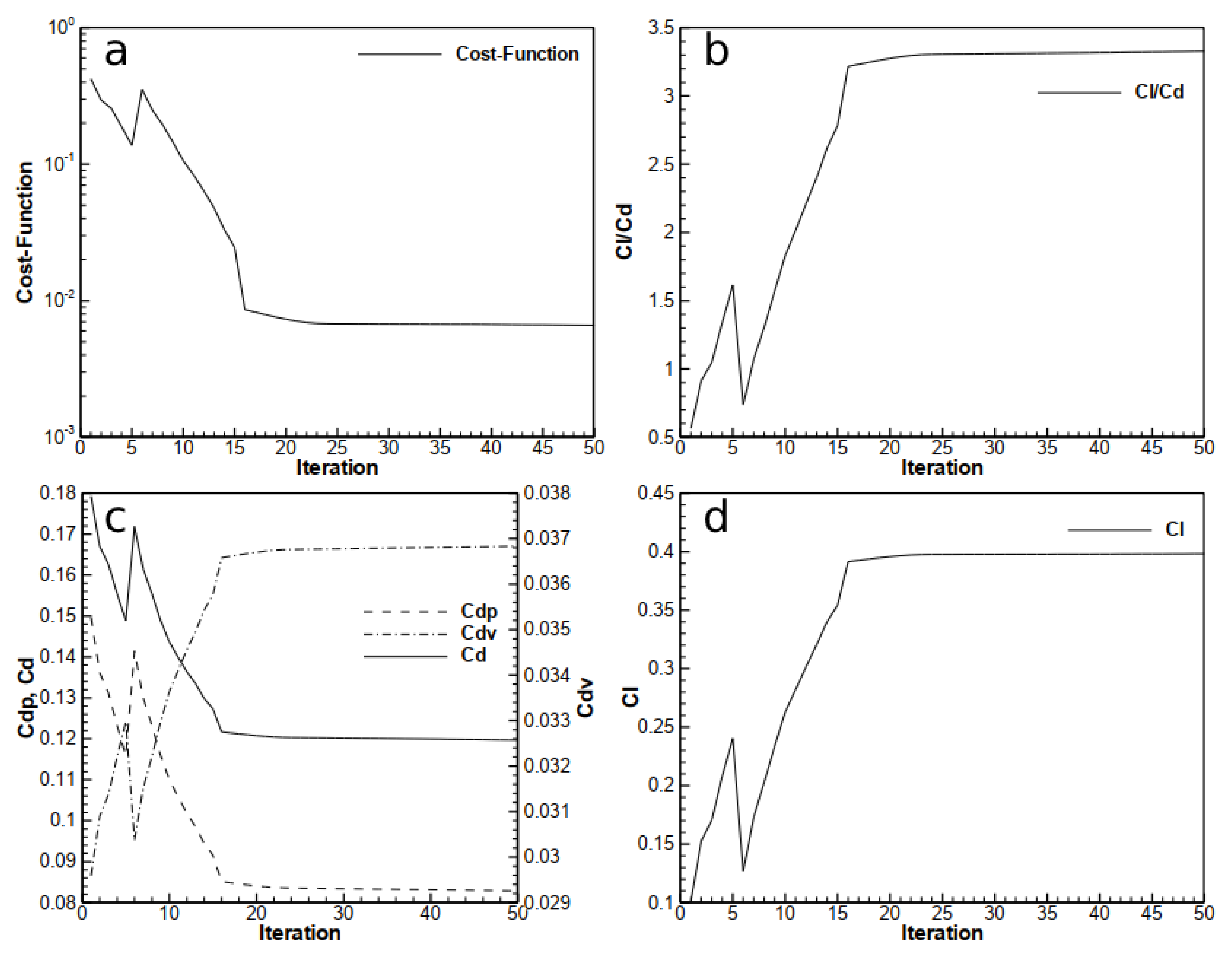
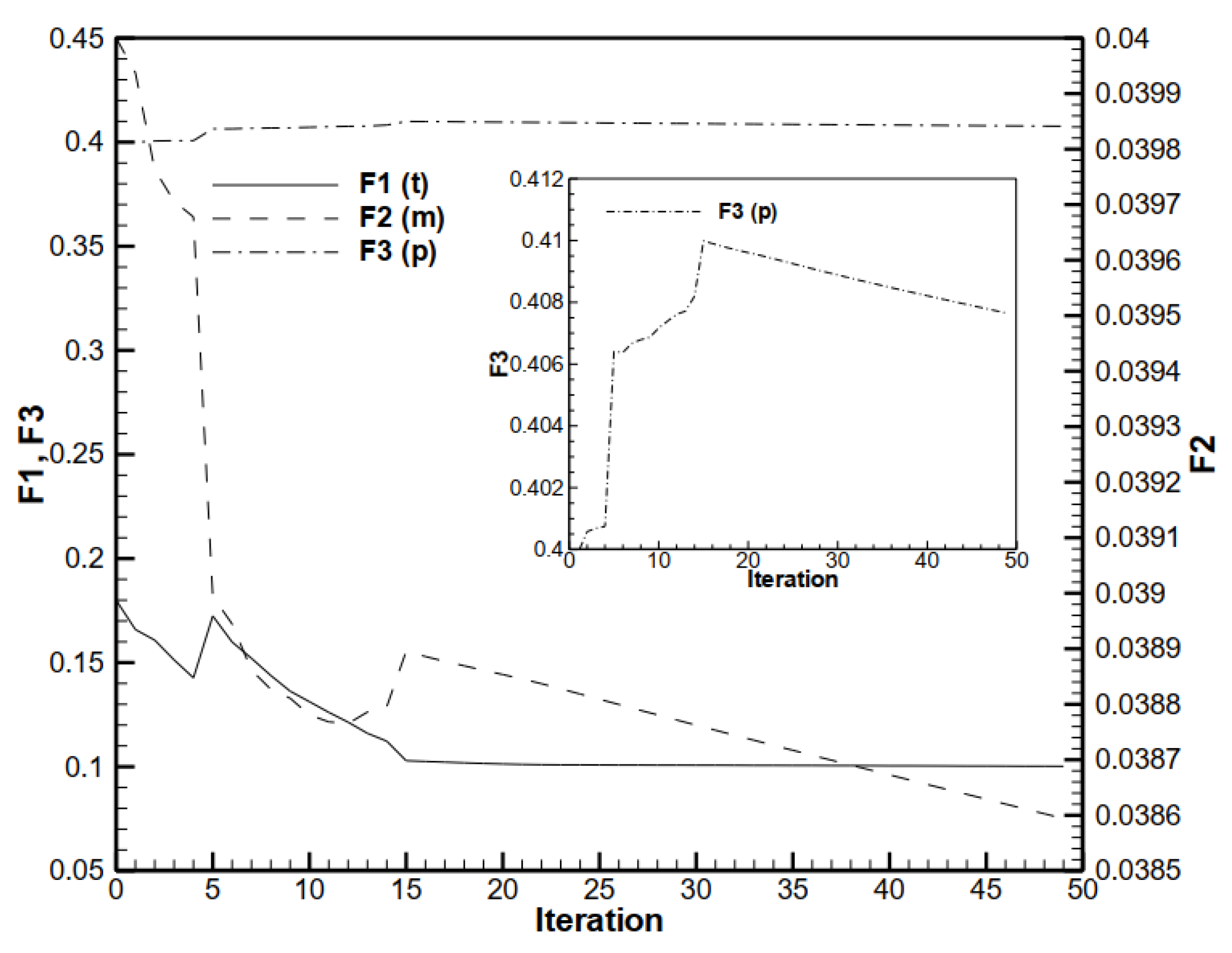
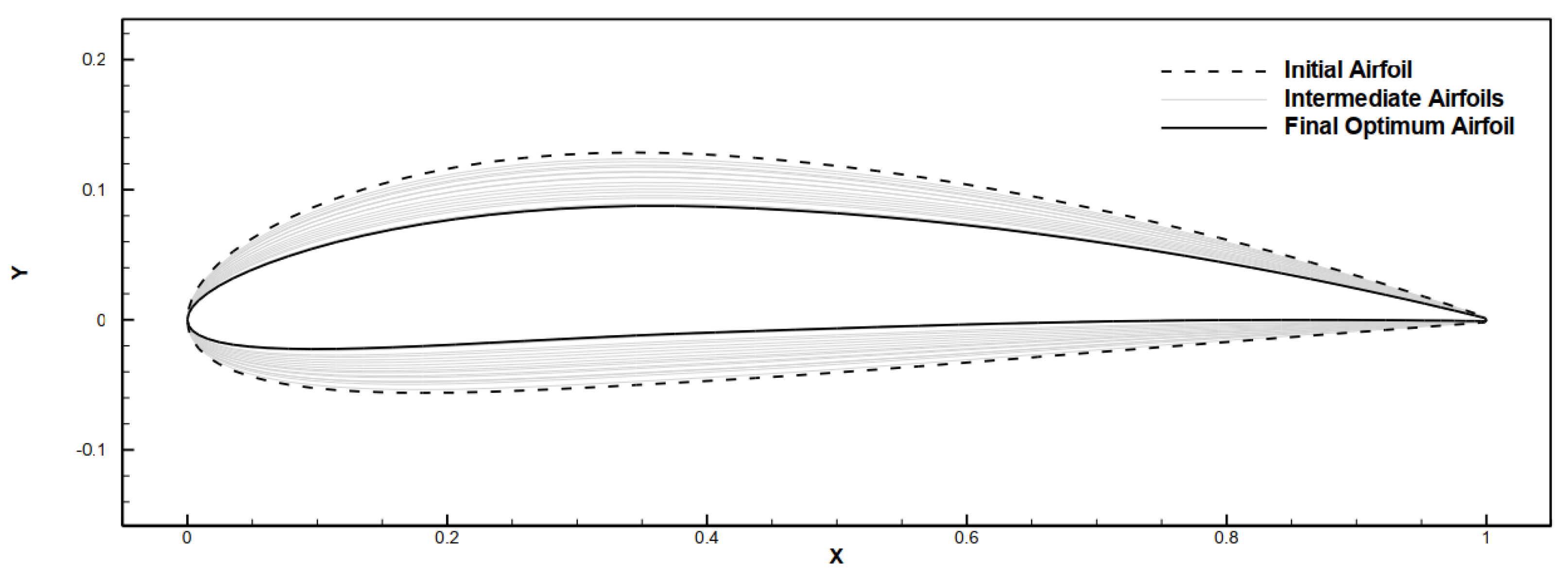
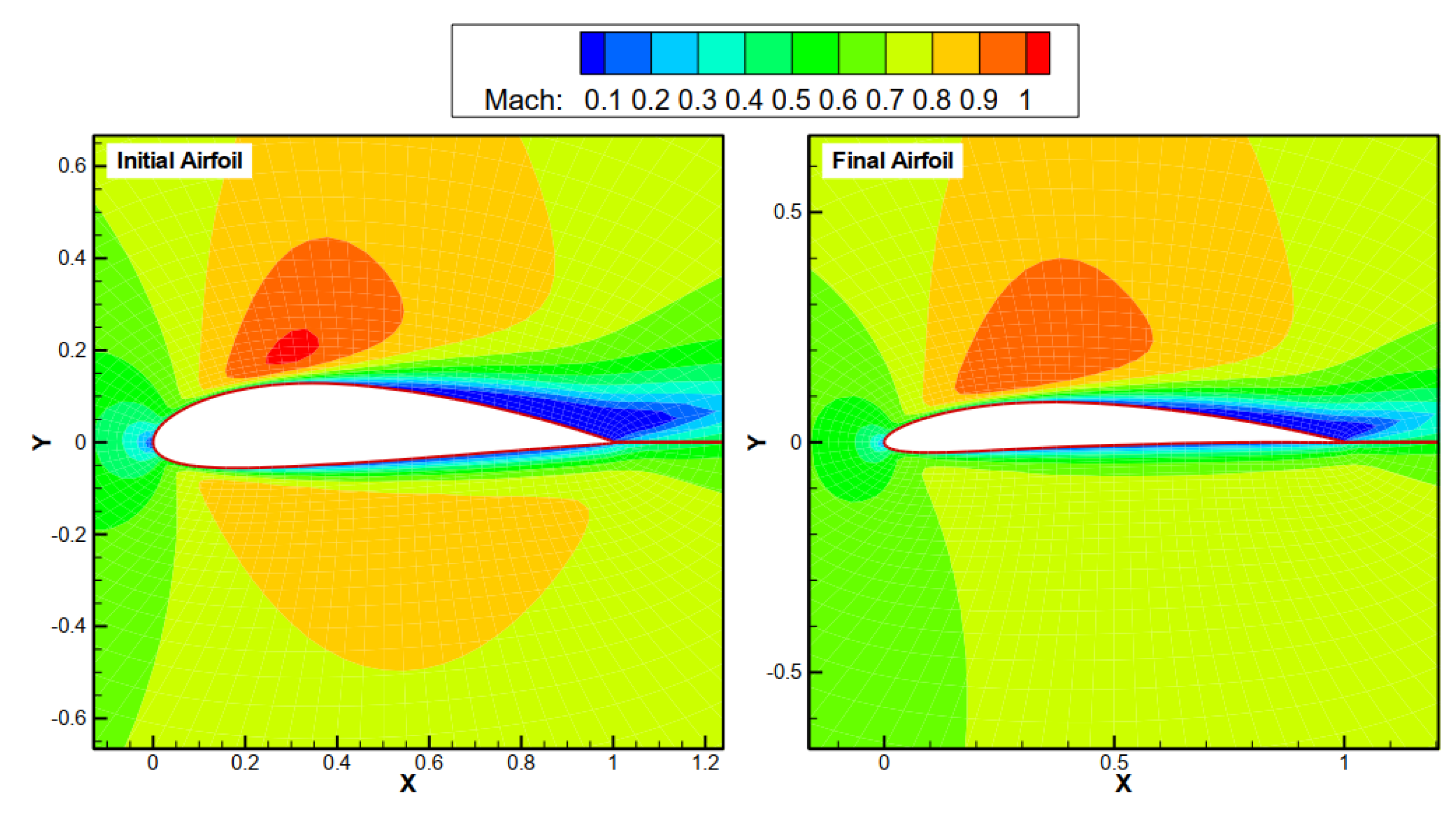
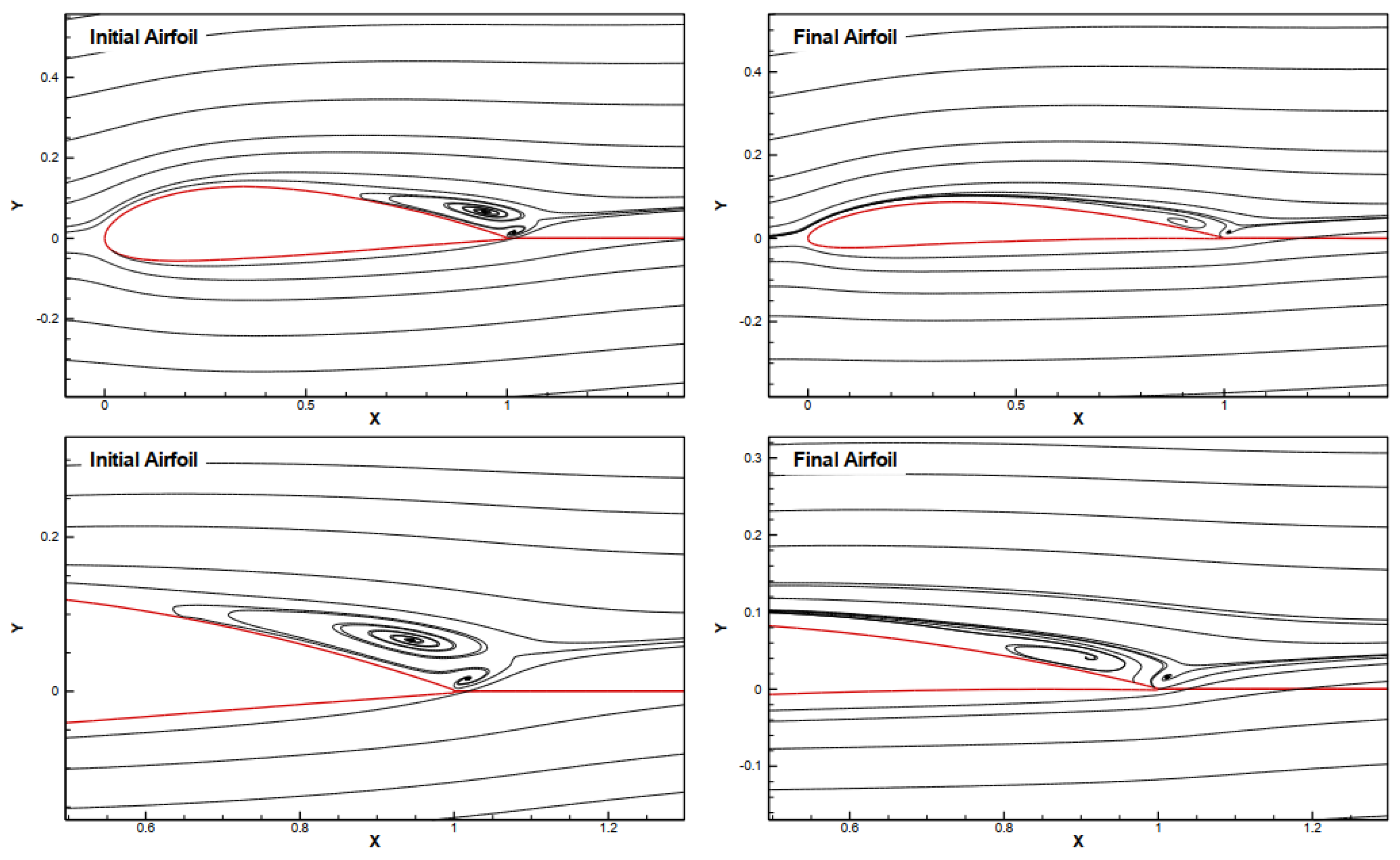
4.4. Multipurpose Optimization of Airfoil
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Angle of Attack | |
| Step Size of Steepest Descent | |
| Airfoil’s Boundary Geometry | |
| Boundary Geometric Variables of Cost Function | |
| Gradient of the Cost Function | |
| Search Direction of Steepest Descent Method | |
| Open Domain | |
| Lagrangian Coefficient | |
| Relative Error | |
| a | Direction-based Step Size Coefficient |
| b | Geometry-based Step Size Coefficient |
| c | Chord Length |
| Pressure Drag Coefficient | |
| Viscous Drag Coefficient | |
| Total Drag Coefficient | |
| Lift Coefficient | |
| Target Drag Coefficient | |
| Target Lift Coefficient | |
| f | Viscous Flux |
| Factor of Safety | |
| Non-viscous Flux | |
| Grid Convergence Index | |
| I | Cost Function |
| M | Mach Number |
| m | Maximum Camber |
| X-component of Normal to B | |
| Y-component of Normal to B | |
| p | Maximum Camber Position |
| Target Pressure Distribution on Airfoil | |
| Pressure Distribution on Airfoil | |
| Order of Convergence | |
| R | Flow Equations |
| r | Grid Refinement Ratio |
| Reynolds Number | |
| t | Maximum Thickness |
| w | Flow variables of Cost Function |
| Mean Camber Line | |
| Thickness distribution |
References
- Pulliam, T.; Nemec, M.; Holst, T.; Zingg, D. Comparison of evolutionary (genetic) algorithm and adjoint methods for multi-objective viscous airfoil optimizations. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; p. 298. [Google Scholar]
- Lyu, Z.; Kenway, G.K.W.; Martins, J.R.R.A. Aerodynamic Shape Optimization Investigations of the Common Research Model Wing Benchmark. AIAA J. 2015, 53, 968–985. [Google Scholar] [CrossRef] [Green Version]
- Tanabi, N.; Barari, A.; Vakilipour, S.; Tsuzuki, M.S.G. Inverse Designing Airfoil Aerodynamics in Compressible Flow by Target Pressure Distribution. In Proceedings of the ICGG 2020-Proceedings of the 19th International Conference on Geometry and Graphics, São Paulo, Brazil, 9–13 August 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 308–319. [Google Scholar]
- Jameson, A. Aerodynamic design via control theory. J. Sci. Comput. 1988, 3, 233–260. [Google Scholar] [CrossRef] [Green Version]
- Lions, J.L. Optimal Control of Systems Governed by Partial Differential Equations; Springer: Berlin/Heidelberg, Germany, 1971; Volume 170. [Google Scholar]
- Mohammadi, B.; Pironneau, O. Applied Shape Optimization for Fluids; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Orovio-Kiachagias, E.M.; Asouti, V.G.; Giannakoglou, K.C.; Gkagkas, K.; Shimokawa, S.; Itakura, E. Multi-point aerodynamic shape optimization of cars based on continuous adjoint. Struct. Multidiscip. Optim. 2019, 59, 675–694. [Google Scholar] [CrossRef]
- Bueno-Orovio, A.; Castro, C.; Palacios, F.; Zuazua, E. Continuous adjoint approach for the Spalart-Allmaras model in aerodynamic optimization. AIAA J. 2012, 50, 631–646. [Google Scholar] [CrossRef]
- Giles, M.B.; Pierce, N.A.; Giles, M.; Pierce, N. Adjoint equations in CFD-Duality, boundary conditions and solution behaviour. In Proceedings of the 13th Computational Fluid Dynamics Conference, Snowmass Village, CO, USA, 29 June–2 July 1997; p. 1850. [Google Scholar]
- Giles, M.B.; Pierce, N.A. On the properties of solutions of the adjoint Euler equations. Numer. Methods Fluid Dyn. VI 1998, 1–16. [Google Scholar]
- Giles, M.B.; Pierce, N.A. Analytic adjoint solutions for the quasi-one-dimensional Euler equations. J. Fluid Mech. 2001, 426, 327–345. [Google Scholar] [CrossRef] [Green Version]
- Qiao, Z.; Yang, X.D.; Zhu, B. Numerical optimization design of wings by solving adjoint equations. Coordinates 2002, 3, 1. [Google Scholar]
- Xie, L. Gradient-Based Optimum Aerodynamic Design Using Adjoint Methods; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2002. [Google Scholar]
- Braibant, V.; Fleury, C. Shape Optimal-Design Using B-Splines. Comput. Methods Appl. Mech. Eng. 1984, 44, 247–267. [Google Scholar] [CrossRef]
- Poles, S.; Fu, Y.; Rigoni, E. The Effect of Initial Population Sampling on the Convergence of Multi-Objective Genetic Algorithms. In Proceedings of the Multiobjective Programming and Goal Programming: Theoretical Results and Practical Applications; Lecture Notes in Economics and Mathematical Systems; Barichard, V., Ehrgott, M., Gandibleux, X., Kindt, V.T., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; Volume 618, p. 123. [Google Scholar]
- Mariotti, A.; Grozescu, A.N.; Buresti, G.; Salvetti, M.V. Separation control and efficiency improvement in a 2D diffuser by means of contoured cavities. Eur. J. Mech. B -Fluids 2013, 41, 138–149. [Google Scholar] [CrossRef]
- Mariotti, A.; Buresti, G.; Salvetti, M.V. Use of multiple local recirculations to increase the efficiency in diffusers. Eur. J. Mech. B-Fluids 2015, 50, 27–37. [Google Scholar] [CrossRef]
- Telidetzki, K.; Osusky, L.; Zingg, D.W. Application of jetstream to a suite of aerodynamic shape optimization problems. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 0571. [Google Scholar]
- Amoignon, O.; Hradil, J.; Navratil, J. Study of parameterizations in the project CEDESA. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 0570. [Google Scholar]
- Carrier, G.; Destarac, D.; Dumont, A.; Meheut, M.; Salah El Din, I.; Peter, J.; Ben Khelil, S.; Brezillon, J.; Pestana, M. Gradient-based aerodynamic optimization with the elsA software. In Proceedings of the 52nd Aerospace Sciences Meeting, National Harbor, MD, USA, 13–17 January 2014; p. 0568. [Google Scholar]
- Othmer, C. A continuous adjoint formulation for the computation of topological and surface sensitivities of ducted flows. Int. J. Numer. Methods Fluids 2008, 58, 861–877. [Google Scholar] [CrossRef]
- Othmer, C. Adjoint methods for car aerodynamics. J. Math. Ind. 2014, 4, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Nemec, M.; Zingg, D.W.; Pulliam, T.H. Multipoint and multi-objective aerodynamic shape optimization. AIAA J. 2004, 42, 1057–1065. [Google Scholar] [CrossRef]
- Schramm, M.; Stoevesandt, B.; Peinke, J. Simulation and Optimization of an Airfoil with Leading Edge Slat; IOP Publishing: Bristol, UK, 2016; Volume 753, p. 022052. [Google Scholar]
- Rashad, R.; Zingg, D.W. Aerodynamic shape optimization for natural laminar flow using a discrete-adjoint approach. AIAA J. 2016, 54, 3321–3337. [Google Scholar] [CrossRef]
- Elham, A.; van Tooren, M.J.L. Discrete adjoint aerodynamic shape optimization using symbolic analysis with OpenFEMflow. Struct. Multidiscip. Optim. 2021, 63, 2531–2551. [Google Scholar] [CrossRef]
- Liou, M.S. A sequel to AUSM: AUSM+. J. Comput. Phys. 1996, 129, 364–382. [Google Scholar] [CrossRef]
- Liou, M.S.; Steffen Jr, C.J. A new flux splitting scheme. J. Comput. Phys. 1993, 107, 23–39. [Google Scholar] [CrossRef] [Green Version]
- Roache, P.J. Verification and Validation in Computational Science and Engineering; Hermosa: Albuquerque, NM, USA, 1998; Volume 895. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Ratio |
|---|---|---|
| Airfoil Thickness | t | 0.1 c ∼ 0.4 c |
| Airfoil Maximum Camber | m | 0%∼9.5% |
| Airfoil Maximum Camber Position | p | 0.1∼0.9 |
| Parameter | Symbol | Ratio |
|---|---|---|
| Airfoil Thickness | t | 0.1 c∼0.4 c |
| Airfoil Maximum Camber | m | 0%∼9.5% |
| Airfoil Maximum Camber Position | p | 0.1∼0.9 |
| Parameter | Symbol | Ratio |
|---|---|---|
| Mach Number | M | 0.72 |
| Reynolds Number | Re | 3000 |
| Angle of Attack | 2.8 | |
| Target Lift Coefficient | 0.45 | |
| Target Drag Coefficient | 0.12 |
| Parameter | Symbol | Initial Value | Final Value |
|---|---|---|---|
| Maximum Thickness | t | 0.180 c | 0.143 c |
| Maximum Camber | m | 4.000% | 3.986% |
| Maximum Camber position | p | 0.400 | 0.397 |
| Lift Coefficient | 0.101 | 0.398 | |
| Pressure Drag Coefficient | 0.150 | 0.083 | |
| Viscous Drag Coefficient | 0.030 | 0.037 | |
| Total Drag Coefficient | 0.179 | 0.120 | |
| Lift-to-Drag Ratio | 0.564 | 3.328 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tanabi, N.; Silva, A.M., Jr.; Pessoa, M.A.O.; Tsuzuki, M.S.G. Robust Algorithm Software for NACA 4-Digit Airfoil Shape Optimization Using the Adjoint Method. Appl. Sci. 2023, 13, 4269. https://doi.org/10.3390/app13074269
Tanabi N, Silva AM Jr., Pessoa MAO, Tsuzuki MSG. Robust Algorithm Software for NACA 4-Digit Airfoil Shape Optimization Using the Adjoint Method. Applied Sciences. 2023; 13(7):4269. https://doi.org/10.3390/app13074269
Chicago/Turabian StyleTanabi, Naser, Agesinaldo Matos Silva, Jr., Marcosiris Amorim Oliveira Pessoa, and Marcos Sales Guerra Tsuzuki. 2023. "Robust Algorithm Software for NACA 4-Digit Airfoil Shape Optimization Using the Adjoint Method" Applied Sciences 13, no. 7: 4269. https://doi.org/10.3390/app13074269
APA StyleTanabi, N., Silva, A. M., Jr., Pessoa, M. A. O., & Tsuzuki, M. S. G. (2023). Robust Algorithm Software for NACA 4-Digit Airfoil Shape Optimization Using the Adjoint Method. Applied Sciences, 13(7), 4269. https://doi.org/10.3390/app13074269