1. Introduction
The performance of drive systems has a substantial impact on rotorcrafts. New transmission configurations are being proposed and developed to meet the high power-to-weight ratio and high reliability requirements of helicopter main gearbox transmission systems. White [
1] proposed an alternative design solution for planetary transmissions called a split-torque design. Kish [
2] and Krantz [
3,
4] concluded that the split-torque design can reduce the weight and has notable advantages over conventional designs. However, the problem remains as to how to ensure the loads are equal across the branches. Therefore, a series of projects funded by the National Aeronautics and Space Administration (NASA) [
2,
5,
6,
7,
8,
9], which started in the 1980s, has conducted considerable research on cylindrical gear power-split drives and power-split transmissions containing face gears. Moreover, the cylindrical split-torque transmission and the face gear split-torque transmission were successfully applied to the Comanche [
10] and Block III [
11] helicopter drive systems.
A critical piece of technology regarding split-torque transmissions is their equal-load design, which indicates that the loads borne in the split-torque path are as equal as possible [
12]. If loads are not equal, the gears carrying larger loads are prone to excessive wear and even failure. Therefore, torque equality between different paths is a crucial topic in the design of split-torque transmissions. Scholars worldwide have extensively studied the technical requirements of load equalization in the split-torque design of cylindrical gears and face gears.
The load-sharing mechanisms, statics, and dynamics of cylindrical gear split-torque have aspects studied. Krantz [
4] demonstrated that improved load-sharing performance can be achieved through proper structural designs, which can reduce dynamic transmission errors and noise, and analyzed the dynamics of a split-torque gear system. Then, Zhao et al. [
13] created a dynamic model of a power-split transmission, solved the motion equations using the numerical integration method, and considered how the interaction of internal parameters affects load sharing. Additionally, Dong et al. [
14] obtained time-varying meshing stiffness curves through loaded tooth contact analysis and set up a quasi-static model of a power-split gear train to determine the load-sharing ratios for different installation errors. Fu et al. [
15] modeled the nonlinear dynamics of a power-split drive system for helicopters, evaluated the load-sharing features using dynamic analysis, and improved the load-averaging performance by modifying the phase difference based on an enhanced NSGA-II optimization algorithm. Dong et al. [
16] constructed a static model for a power-split star gear drive containing spur and helical gears to examine the influences of machining errors, mounting errors, and component floats on the load distribution factor. Moreover, Hu et al. [
17] developed a two-path split-torque gear system dynamics model to analyze the natural frequency, critical speed, dynamic relative displacement of gear pairs, and load distribution characteristics. The model considered nonlinear factors, such as tooth clearance, transmission errors, and gyroscopic effects. Furthermore, Liu et al. [
18] analyzed loaded and unloaded tooth meshing to obtain the time-varying meshing stiffness and then constructed a dynamics model of a dual-input two-path power-sharing transmission system considering meshing errors. Then, the effects of tooth modifications on the load distributions and dynamic load characteristics were explored. A three-dimensional analysis model of a two-power-input split-torque gear drive with 41 degrees of freedom was created by Jin et al. [
19,
20] using the centralized parameter method. The system response was obtained using the Fourier series method, which revealed the law of the variation in the friction torque coefficient and friction stiffness, as well as the impact of harmonic frequency on the transmission error.
The face gear drive has the advantages of a high reduction ratio, low error sensitivity, and simple support structure, compared with cylindrical gears and spiral bevel gears, and is primarily utilized in split-torque transmissions for helicopter main gearboxes [
6,
21]. With the support of the Advanced Rotorcraft Transmission (ART) Program, Litvin studied tooth geometry designs [
22,
23], tooth contact analysis methods [
23], modifications [
24], and grinding [
25] for face gear drives. The suitability of face gears for high rotational speed and heavy load transmissions was fully verified, both theoretically and experimentally, in the middle and late stages of the ART program [
26,
27]. Moreover, various split-torque configurations containing face gears [
5,
28,
29] have been proposed, and their load-sharing and dynamic characteristics have been thoroughly investigated. Additionally, Handschuh et al. [
27] tested six sets of face gears with different geometries and different heat treatments to evaluate the feasibility of face gears in the main helicopter rotor gearboxes and to identify the failure mechanisms and load-carrying capability in a simulated helicopter transmission environment. Pias et al. [
28] designed a split-power drive system with two face gears. The input pinion with a floating structure meshed with two coaxial counterrotating face gears. Moreover, Jin et al. [
29] proposed a quadratic split-power transmission system containing face gears. The trends in load distribution and dynamic load coefficients with tooth clearances were studied using numerical methods. Mo et al. [
30] examined a face gear split-power system with manufacturing and assembly errors using the lumped parameter model and developed a translational–torsional coupling model. An analysis of the dynamic factors’ influence on the load distribution coefficient revealed that the load on the gears might be more equally distributed by adjusting the dynamic parameters. Mo et al. [
31] created differential equations of a two-input face gear transmission. The impacts of the eccentricity error, support stiffness, and torsional stiffness were estimated on the contact force and sharing between gear pairs. Dong et al. [
32] formed dynamic differential equations of a coaxial face gear drive that considered the time-varying mesh stiffness, backlash, and other factors. Moreover, the change in the load-sharing behavior under different parameters was analyzed. Zhao et al. [
33] investigated the load-sharing behavior of a coaxial split-torque face gear train by using a combination of lumped parameters and finite elements. The analysis showed that the matching design of the backlash and support stiffness and an even number of pinion teeth can improve the system load distribution performance. Dong et al. [
34] explored the natural properties of the face gear power-split train and described the effect of the torsional flexibility of the input gear shaft on the dynamic load distribution.
The above scholars’ ongoing research has considerably advanced our understanding of dynamic gear load-sharing properties and dynamic response. However, few have modeled the load-dependent time-varying mesh stiffness of face gears and considered it in the dynamics of the CFGSTTS. Moreover, few researchers have optimized the dynamic load-sharing features of the CFGSTTS.
Therefore, in this study and based on the existing research, a more accurate dynamic load-sharing analysis model for the CFGSTTS was constructed using the centralized parameters method. The model considered the load-dependent time-varying meshing stiffness and two different meshing states, the pinion driving and the face gear driving, backlash, support stiffness, and other factors. Then, dynamic differential equations were solved by the numerical integration method, and the law of the variation in the load-sharing factor with the input load and support stiffness was obtained. Finally, taking the minimum sum of load-sharing factors as the objective function, a load-sharing optimization model of the CFGSTTS was developed using the marine predator optimization algorithm. Then, the change direction of the support stiffness under the optimal solution was obtained.
2. Modeling
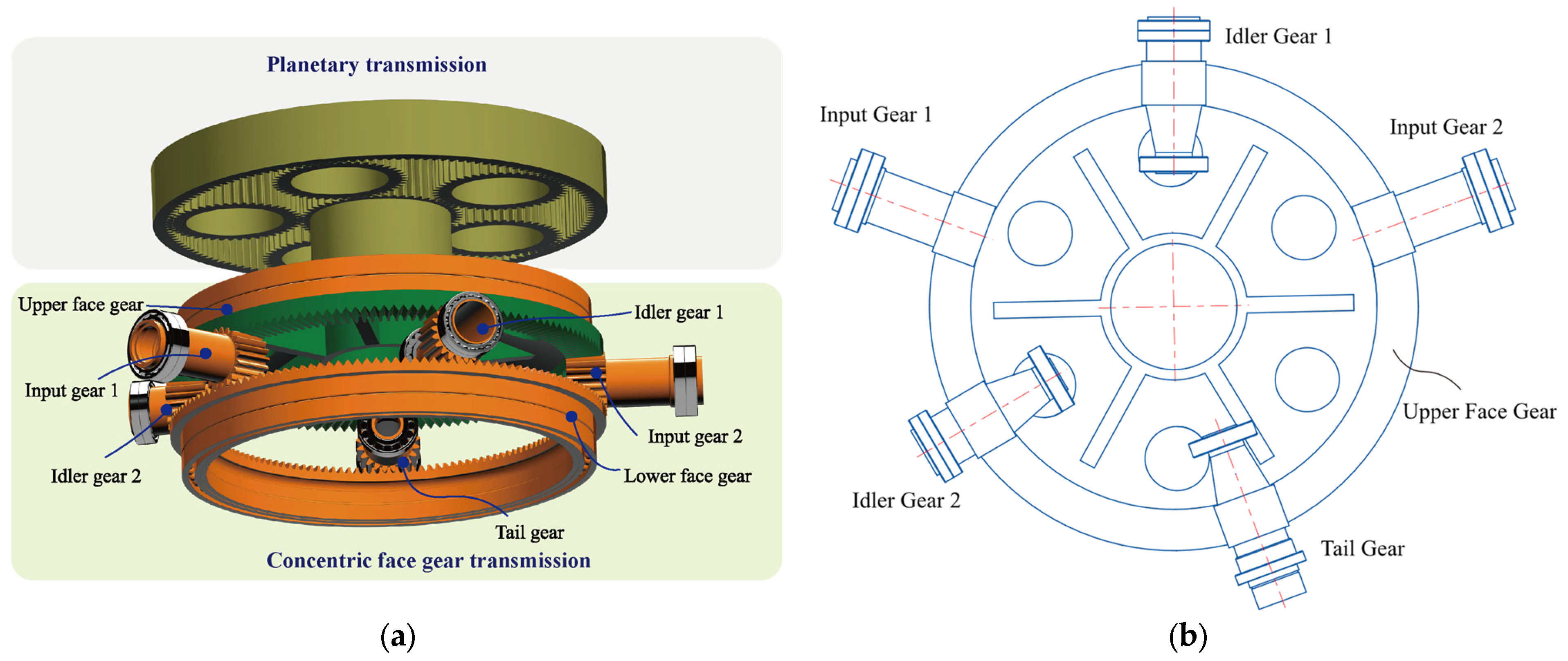
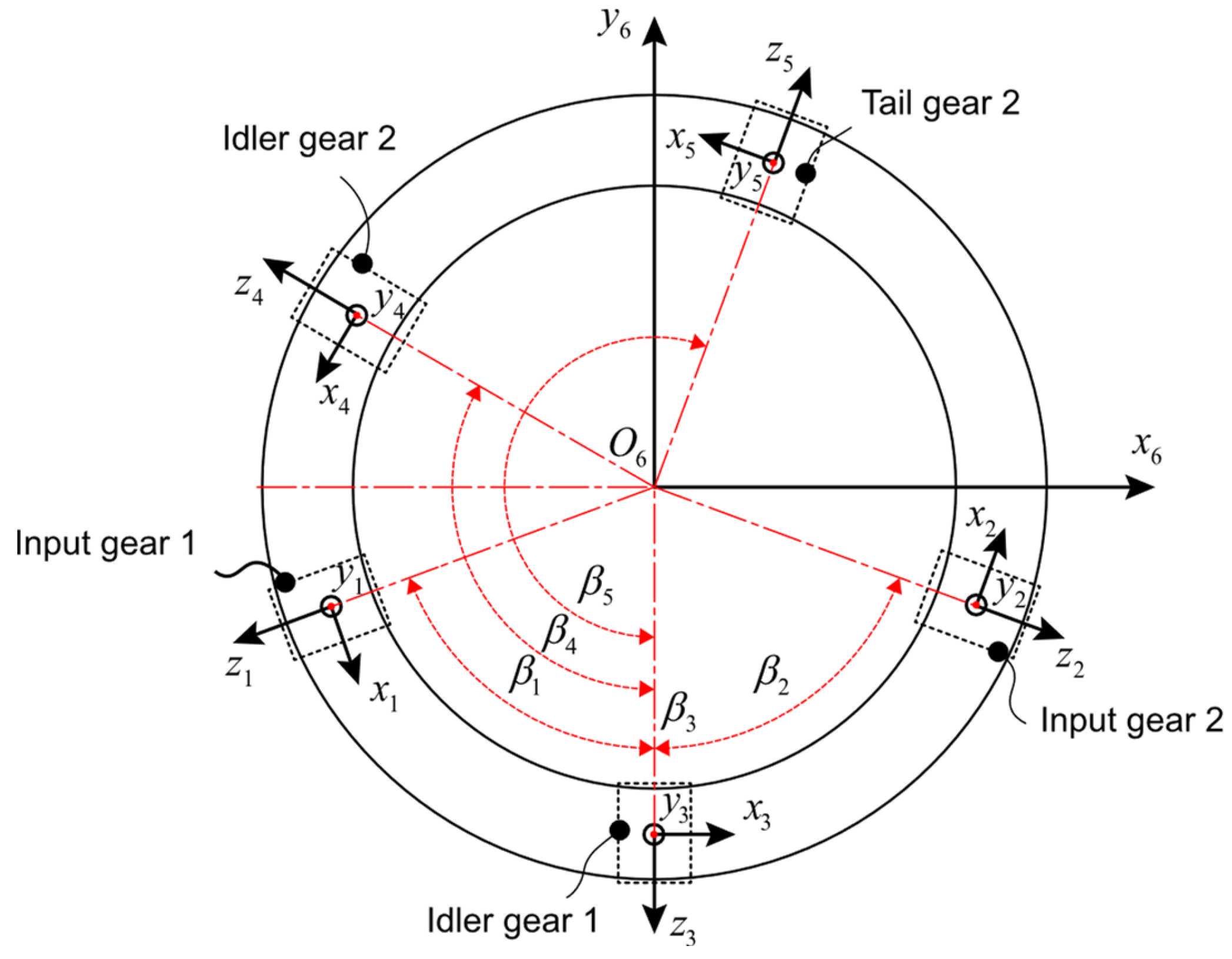
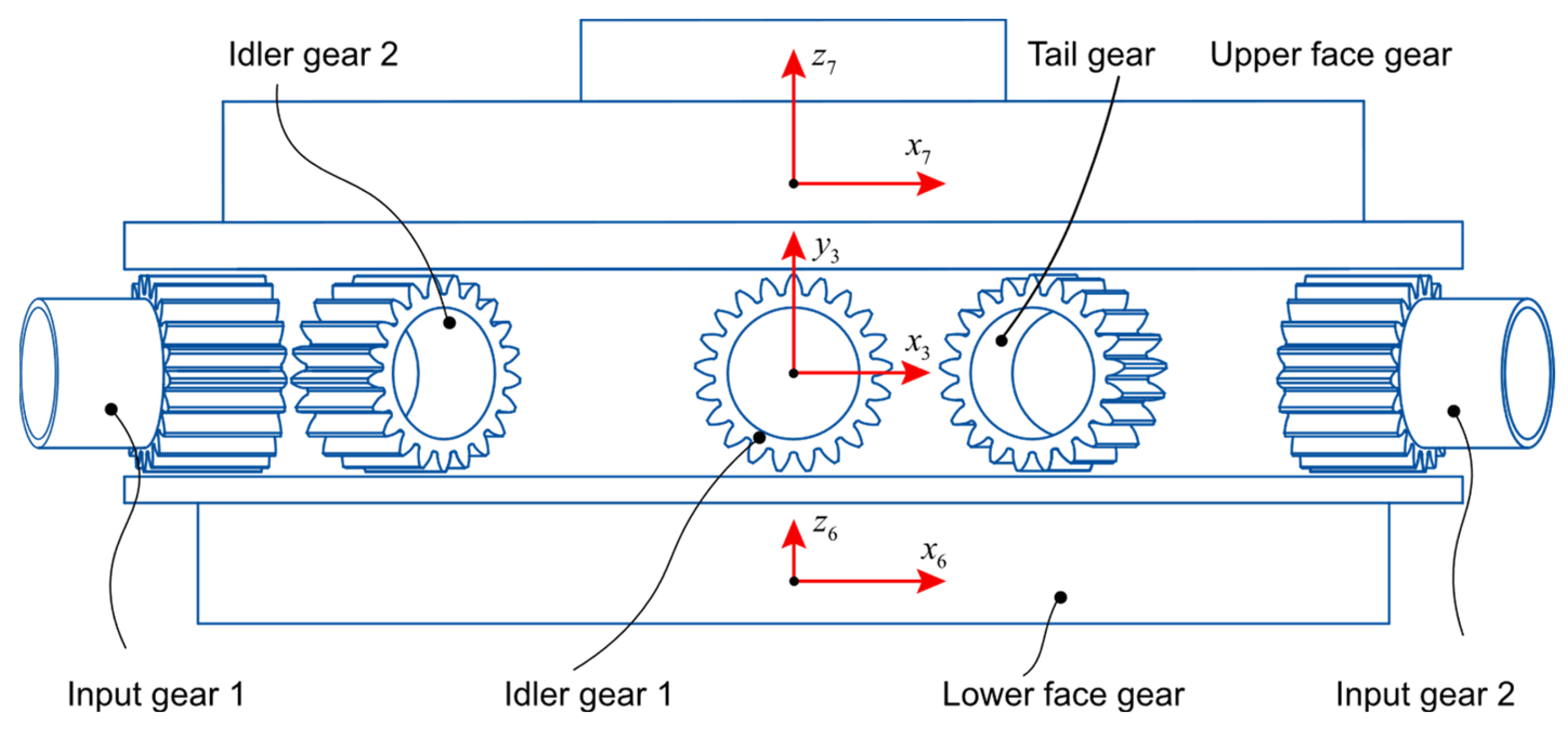
The CFGSTTS shown in
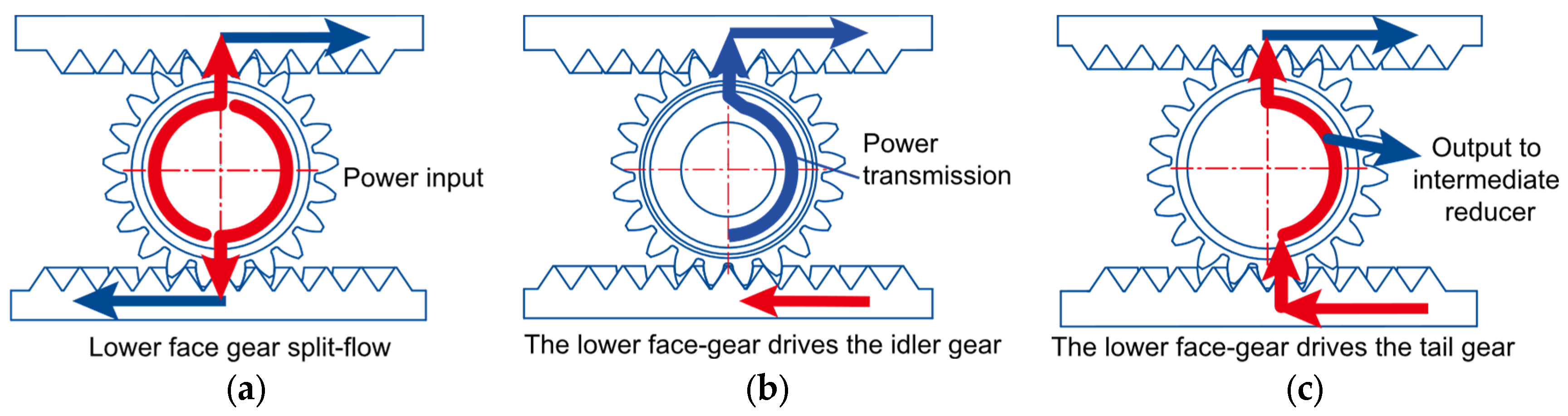
Figure 1 consists of two face gears and five pinions, and the five pinions are two input gears, two idler gears, and one tail gear. Moreover, the power flow direction [
35] is shown in
Figure 2. The power enters from the input gear and is transferred partly to the upper face gear and partly to the lower face gear. Hence, the input gear is the driving gear, as shown in
Figure 2a. In contrast, the idlers are driven by the lower face gear and transmit the power to the upper face gear. The lower face gear also drives the tail gear, and its transmitted power is partly transmitted to the upper face gear and partly output to the intermediate reducer. Therefore, among the ten gear pairs of the system, Idler 1, Idler 2, and the tail gear are driven by the lower face gear. The meshing state of these three gear pairs is different from the rest.
2.1. Neural Network Surrogate Models for Time-Varying Mesh Stiffnesses
The mesh of the face gear and pinion is a nonconjugate contact, where the contact position is a point that expands into an elliptical contact area with respect to the magnitude of the load when bearing the load. Moreover, as the load increases, the number of teeth simultaneously engaged in the face gear mesh pair increases, and the shape of the mesh stiffness curve changes. Therefore, the mesh stiffness pair is closely related to the load. In the CFGSTTS, the elastic support stiffness of the gears affects the load distribution among the gears. The elastic support stiffness changes, and the normal contact force of the gear pair changes accordingly, leading to a change in the mesh stiffness. Consequently, a load-dependent time-varying meshing stiffness model was developed to further consider the time-varying meshing stiffness.
In our previous study, we used the strain energy approach to determine the mesh stiffness [
35]. The upper face gear contains the web. The face gear’s parameters are listed in
Table 1. The specific loading and simulation procedure is described in the literature [
35]. Notably, in this study, the contact stiffness of the tooth contact pair was set to 10 times the default value, which was 1.0; the convergence tolerances of the displacement and force were set to 1/100 of the default values, which were 0.05 and 0.005, respectively. The computational cost increased, but a smoother mesh stiffness curve could be acquired.
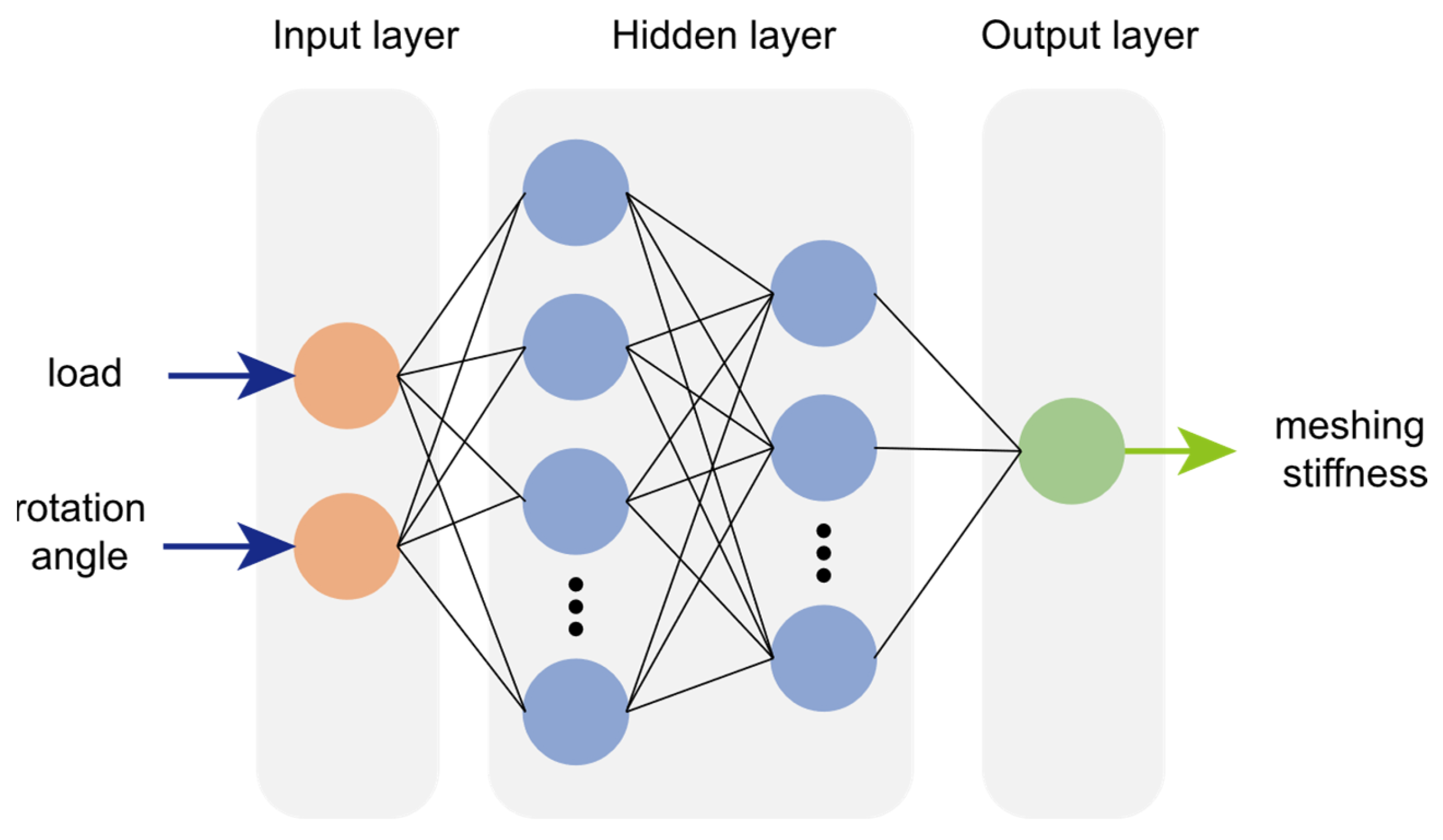
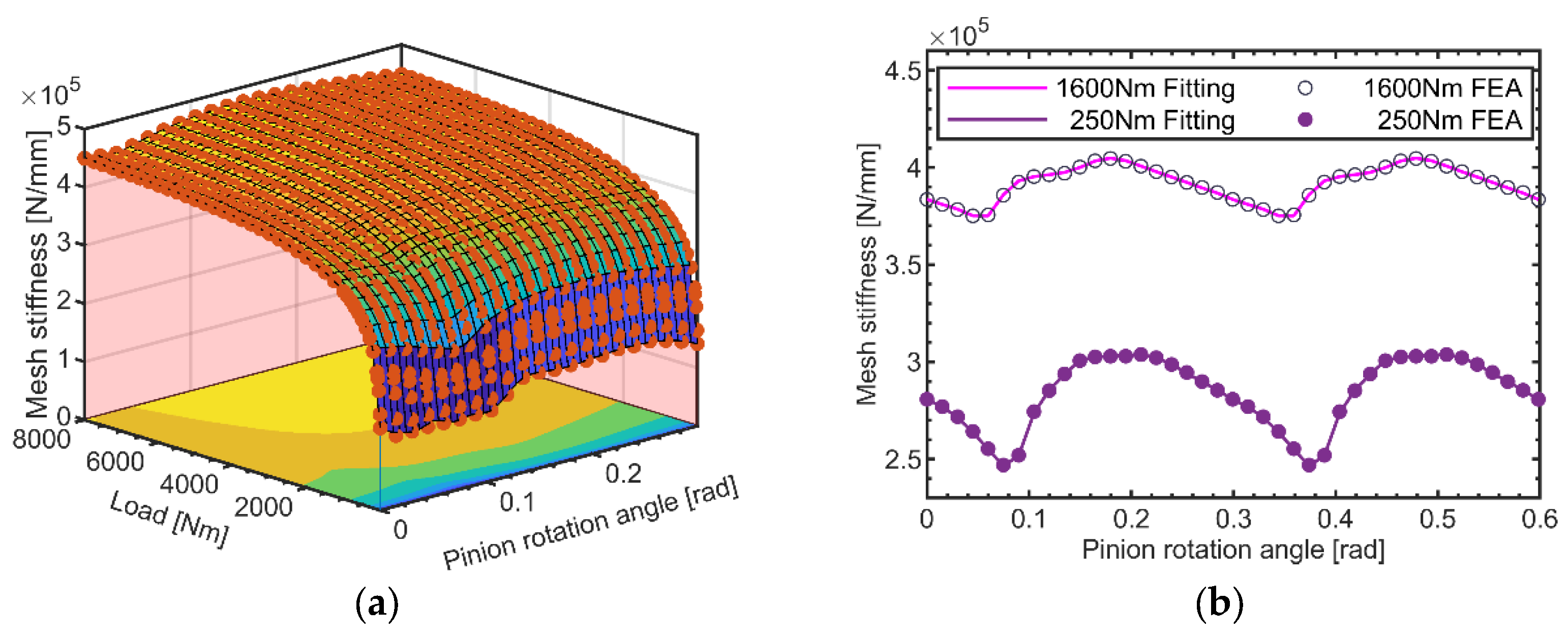
Through quasistatic finite element analysis, the meshing stiffness data, including the load, pinion rotation angle, and stiffness values, were obtained for 1 cycle under 42 sets of loads in the range of 100 to 8000 Nm. Surrogate models can be used to quickly provide a solution instead of a real system by seeking the response relationship between the input and output variables. For complex nonlinear problems, the multilayer feedforward neural network is a more commonly used surrogate model. A multilayer feedforward neural network is a network model with a hierarchical structure composed of simple neural units, which has a strong simulation ability for nonlinear systems. In this study, 42 sets of data were used as training samples to construct a neural network with the topology shown in
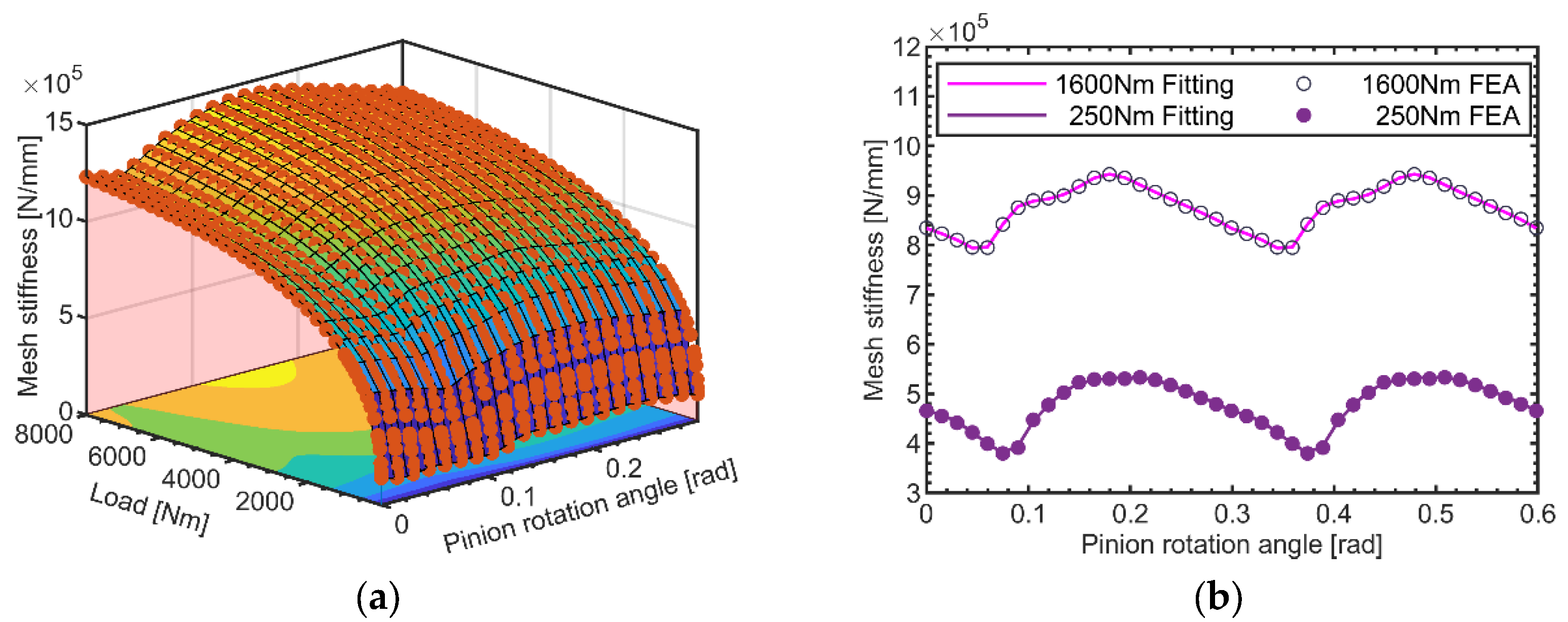
Figure 3, including input, hidden, and output layers. The input layer contained two neurons corresponding to the load and pinion angle, and the output layer was one neuron corresponding to the meshing stiffness value; in addition, the number of neurons in the 2 hidden layers was 20 and 5, respectively. The meshing stiffness neural network models of the lower and upper face gears after training are visualized in
Figure 4a and
Figure 5a, respectively.
The generalization ability of feedforward neural networks refers to the ability of the network to describe the correct input–output relationship for nontrained samples in the same sample set, which is used to characterize the prediction ability of the learning model for unknown data. To verify the generalization ability of the load-related time-varying mesh stiffness proxy model, the prediction values of the neural network were calculated for input loads of 250 and 1600 Nm. The results in
Figure 4b and
Figure 5b show that the output of the agent model was almost the same as that of the finite element simulation, indicating that the agent model had a strong generalization capability.
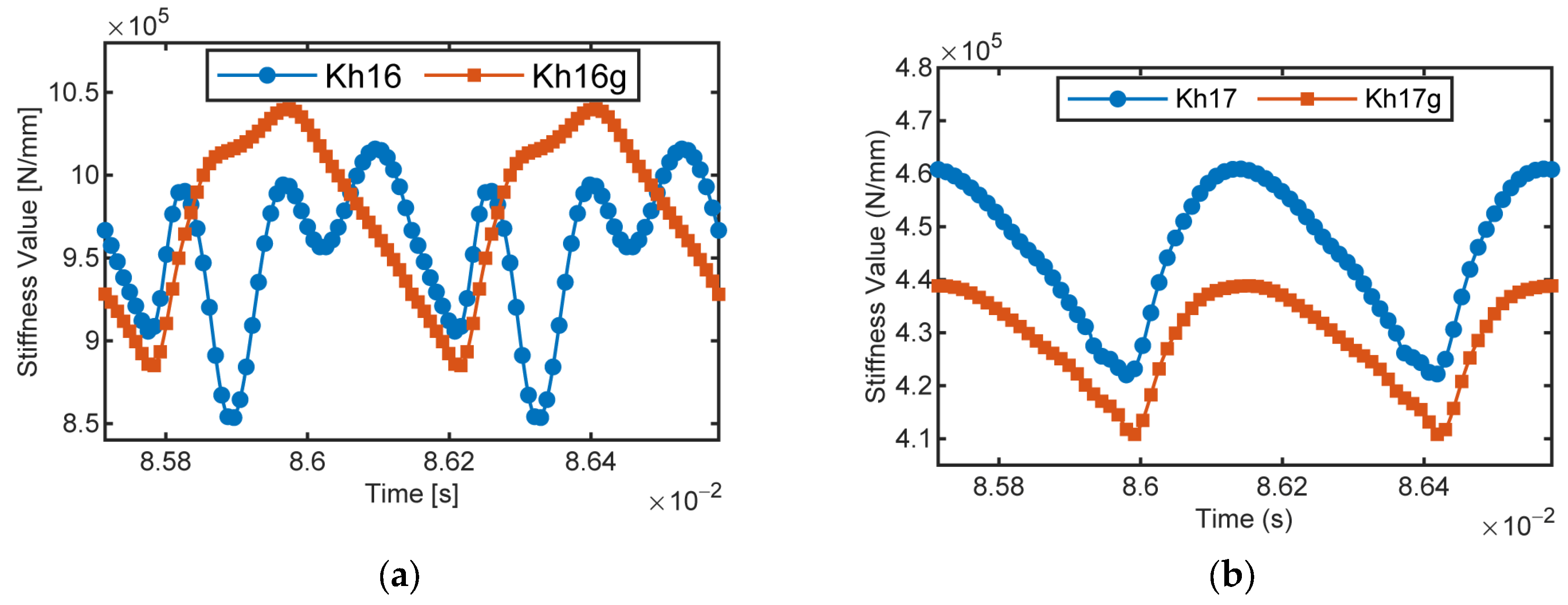
Figure 6 illustrates the meshing stiffness at a fixed load and the meshing stiffness as a function of the load. With the support stiffness shown in
Table 2, the static meshing forces of Input Gear 1 with the lower and upper face gears were 8967 and 12,588 N, respectively. Furthermore, based on this meshing force, the meshing stiffness of Input Gear 1 with the lower face gear Kh16g and the upper face gear Kh17g was calculated for a given load. Kh16 and Kh17 are the meshing stiffnesses calculated based on the meshing stiffness proxy model.
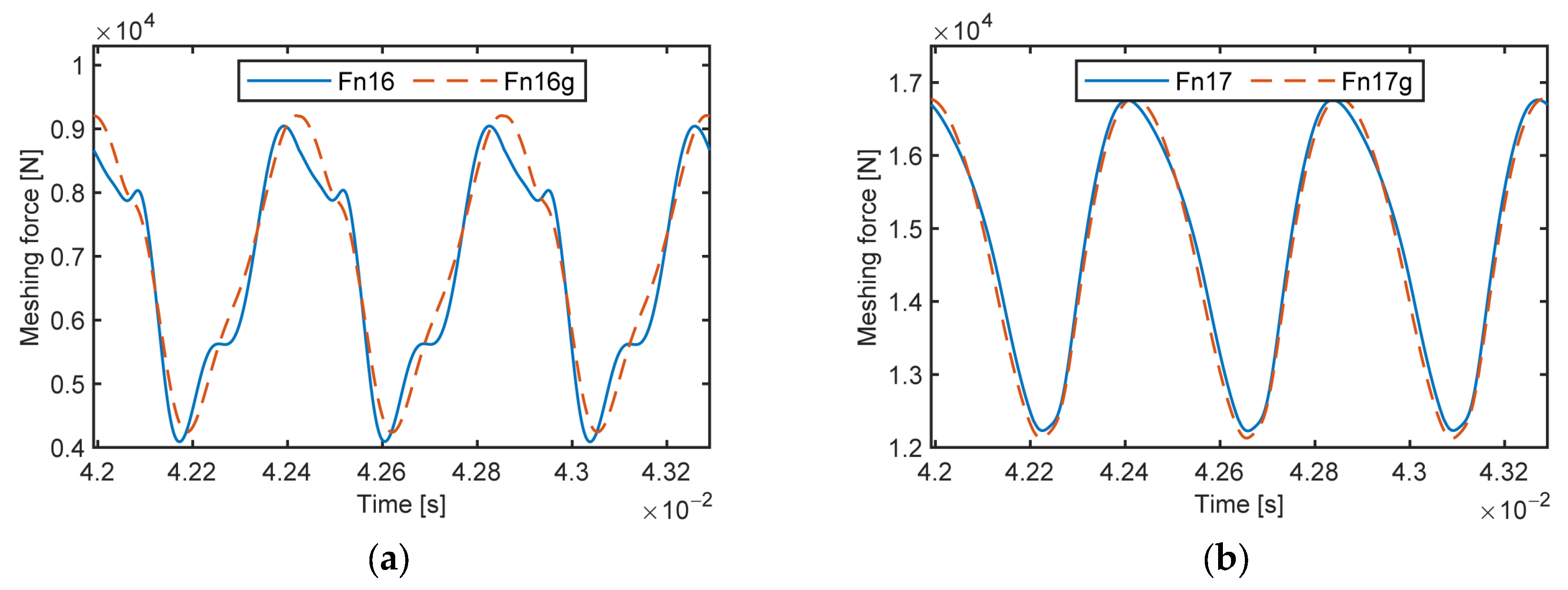
Figure 6 shows that Kh16 is different from Kh16g and that Kh17 and Kh17g differ in value. The dynamic meshing forces of gear pairs of Input Gear 1 were calculated, as shown in
Figure 7a,b, with load-fixed and load-related meshing stiffness. In
Figure 7a, Fn16g has more frequency components and a smaller average meshing force than Fn16. The minimum values of meshing forces Fn17 and Fn17g were 12,228 and 12,124 N, respectively, and the average values were 14,744 and 14,645 N, respectively. The load-sharing coefficients obtained by Formula (38) were 1.368 and 1.376 under load-related and load-fixed meshing stiffness, respectively. Therefore, associating the meshing stiffness with the load is beneficial to increasing the accuracy of the model of CFGSTTS dynamics.
2.2. Two Types of Meshing States
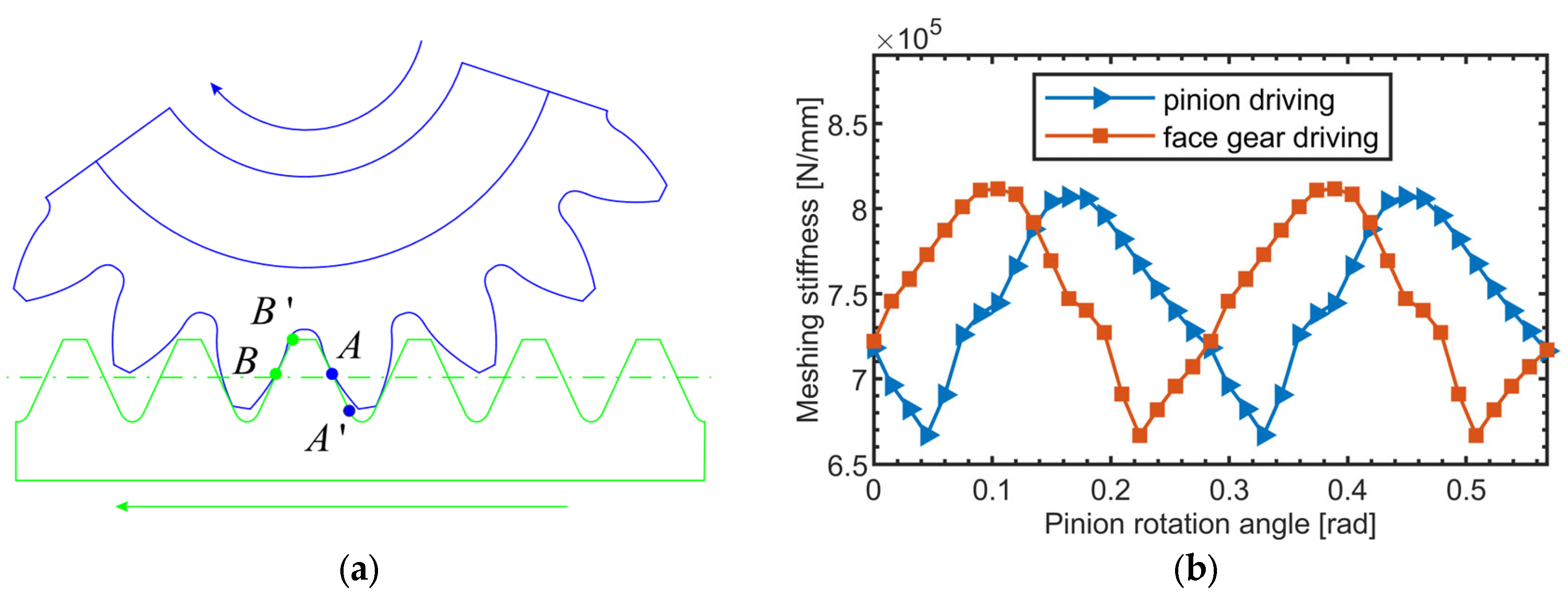
The meshing process of the same meshing pair driven by the face gear and pinion is shown in
Figure 8a. The tooth profile of face gear in
Figure 8a is at the midpoint of the tooth width. Assuming that the middle plane of the pinion groove coincides with the middle plane of the face gear tooth, two meshing points, A and B, simultaneously exist on both teeth faces of the face gear if the clearance is not considered. If the pinion drives the face gear to rotate clockwise, the meshing point A moves toward A′ at the root of the face gear. Conversely, if the face gear drives the pinion to rotate clockwise, meshing point B gradually moves toward B′ at the tip of the face gear. The corresponding mesh stiffness curves are shown in
Figure 8b. The figure shows that the two curves differ not only in phase, but also in curve direction. The meshing stiffness of the pinion-driving gear pair is denoted as
k(
t); then, the meshing stiffness of the face gear-driving meshing pair is denoted as
, where
is the inverse of
, and
is the phase difference.
Due to nonlinear excitation, a face gear may have three contact states during the transmission process: regular meshing, disengagement, and tooth-back contact. In the dynamic studies of the face gear drive [
12,
35], the meshing stiffness of the tooth-back mesh has not been differentiated from that of the regular mesh. Therefore, in this study, based on the meshing stiffness agent model, the meshing model considering the disengagement and tooth-back contact was established, denoted as:
where
k1(
t) is the meshing stiffness for regular meshing,
k2(
t) is the meshing stiffness for tooth-back meshing, and
fδ is the relative displacement of the gear pair.
In the coaxial face gear split-torque transmission system, the distribution of the pinion around the circumference of the face gear and the difference in the number of pinion teeth may introduce meshing phase differences among the different meshing pairs.
Figure 8a shows the initial meshing state of Input Gear 1 with the lower face gear, and the meshing stiffness for one cycle was calculated from this starting position and is expressed as
kin1-L =
k(
t). When the number of pinion teeth is even, no phase difference exists among the meshing pairs driven by the pinion. When the number of pinion teeth is odd, the phase difference between the rest of the meshing pairs and the Input Gear 1–lower face gear meshing pair is determined with the following method:
(a) If pinion M and Input Gear 1 are distributed on the circumference of the lower face gear differing by n (n is an integer) face gear teeth, then the phase difference between the meshing stiffness kM-L and kin1-L is 0. In contrast, the phase difference between the meshing stiffness kM-U and kin1-L is T/2, where T is the meshing period.
(b) If the pinion M and Input Gear 1 are distributed on the circumference of the lower face gear differing by n + 1/2 face gear teeth, then the phase difference between the meshing stiffness kM-L and kin1-L is T/2. At this time, the phase difference between kM-U and kin1-L is 0.
2.3. Nonlinear Dynamic Model
The arrangement of pinions on the circumference of the face gear and the position of the face gear in space is illustrated in
Figure 9 and
Figure 10, respectively.
Figure 9 and
Figure 10 show the local coordinate system representing the direction of the DOFs of each gear. The
x- and
y-axis of the pinion are radial, the
z-axis is axial, and the
y-axis points to the upper face gear. The
y-axis of the face gear is parallel to the axis of Idler 1 and points in the negative direction of
z3. The
z-axis of the upper face gear is in the same direction as the
z-axis of the lower face gear.
According to the principle of the meshing transmission between the orthogonal face gear and pinion, the meshing force can be decomposed into the radial and circumferential forces on the pinion and the axial and circumferential forces on the face gear. The pinion is not subjected to axial component force, which simplifies the support structure of the system and reduces the degrees of freedom of vibration. Accordingly, two radial degrees of freedom,
x and
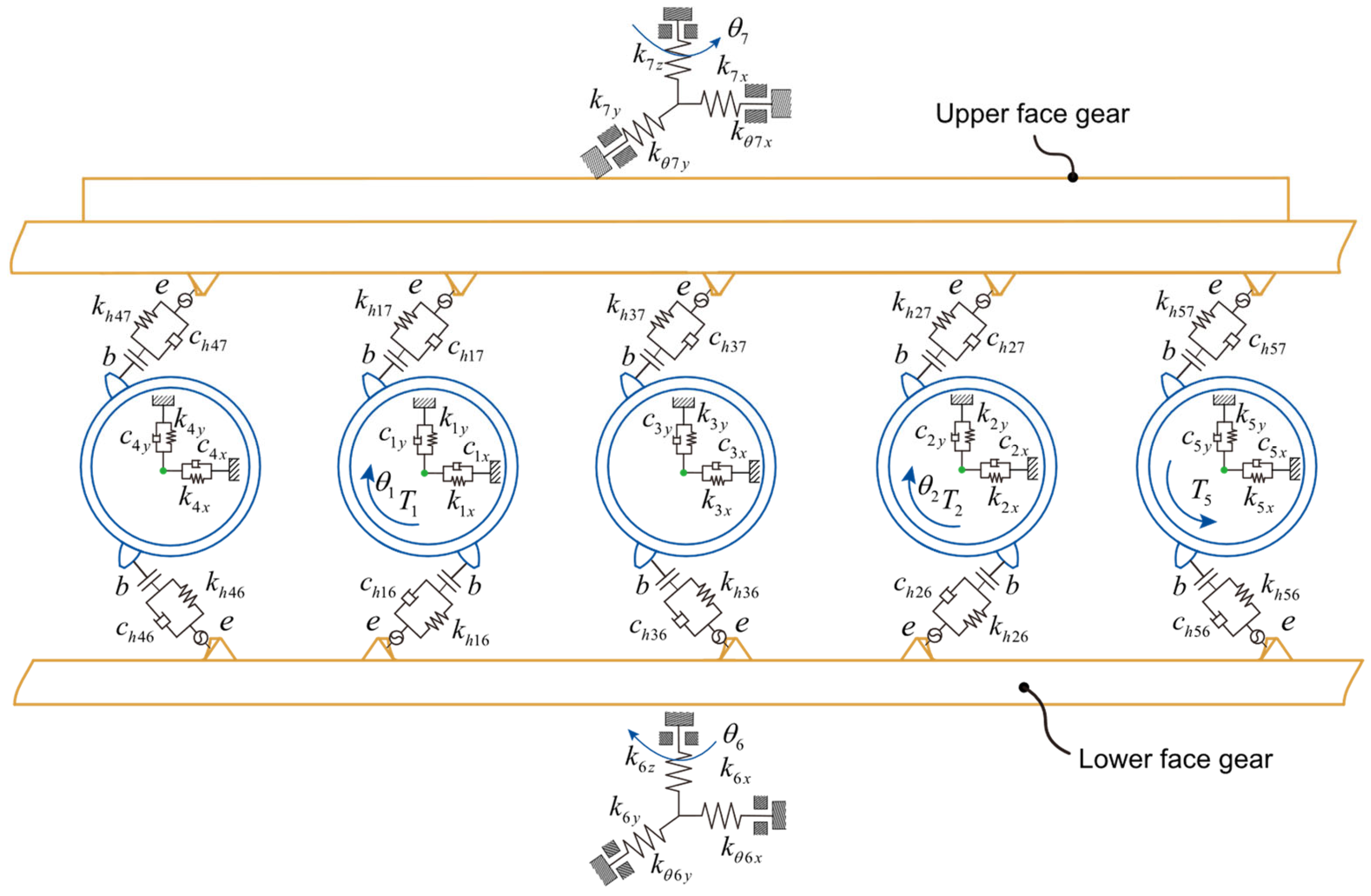
y, and a torsional degree of freedom around the axis of the pinion were considered in this study. In the CFGSTTS, the face gear simultaneously meshes with five pinions. The nonuniform distribution of the pinions on the circumference of the face gear and the difference in the support stiffness of each gear result in the meshing force transmitted by each pinion being different. As a result, the face gears are subjected to time-varying overturning moments. Therefore, the face gear model considers six degrees of freedom. The dynamics model of the concentric face gear split-torque transmission system is shown in
Figure 11.
Under the action of external driving torque and internal excitation, the meshing point of the face gear and pinion deforms and vibrates along the meshing line. The relative displacement
of the meshing point between Input Gear 1 and the lower face gear pair in the direction of the meshing line is expressed as:
where
α is the pressure angle;
β1 is the pinion distribution angle;
r1 and
rf are the distances from the meshing point to the pinion and face gear axes, respectively; and
e16 is the normal static transmission error of the gear pair, which is obtained from Equation (3).
where
e0 is the constant value of the comprehensive transmission error;
er is the amplitude;
ωh is the meshing angular frequency of the gear pair; and
φr is the initial phase.
is the relative displacement formed by the rotation of the lower face gear along
x6 and
y6, expressed as:
Likewise, the relative displacement
δ17 of the meshing point between Input Gear 1 and the upper face gear in the meshing line direction is expressed as:
Similarly, the relative displacements
δ26 and
δ27 of Input Gear 2 with the lower and upper face gears in the direction of the meshing line, respectively, are:
The relative displacements
δ36 and
δ37 of Idler 1 with the lower and upper face gears in the direction of the meshing line, respectively, are:
The relative displacements
δ46 and
δ47 of Idler 2 with the lower and upper face gears in the direction of the meshing line, respectively, are:
The relative displacements
δ56 and
δ57 of the tail gear with the lower and upper face gears in the direction of the meshing line, respectively, are:
The dynamic load of the gear pair in the direction of the meshing line is obtained from Equation (23).
where
k(
t) is the time-varying meshing stiffness;
δ is the relative displacement of the meshing point;
is the relative velocity; and
cm is the meshing damping.
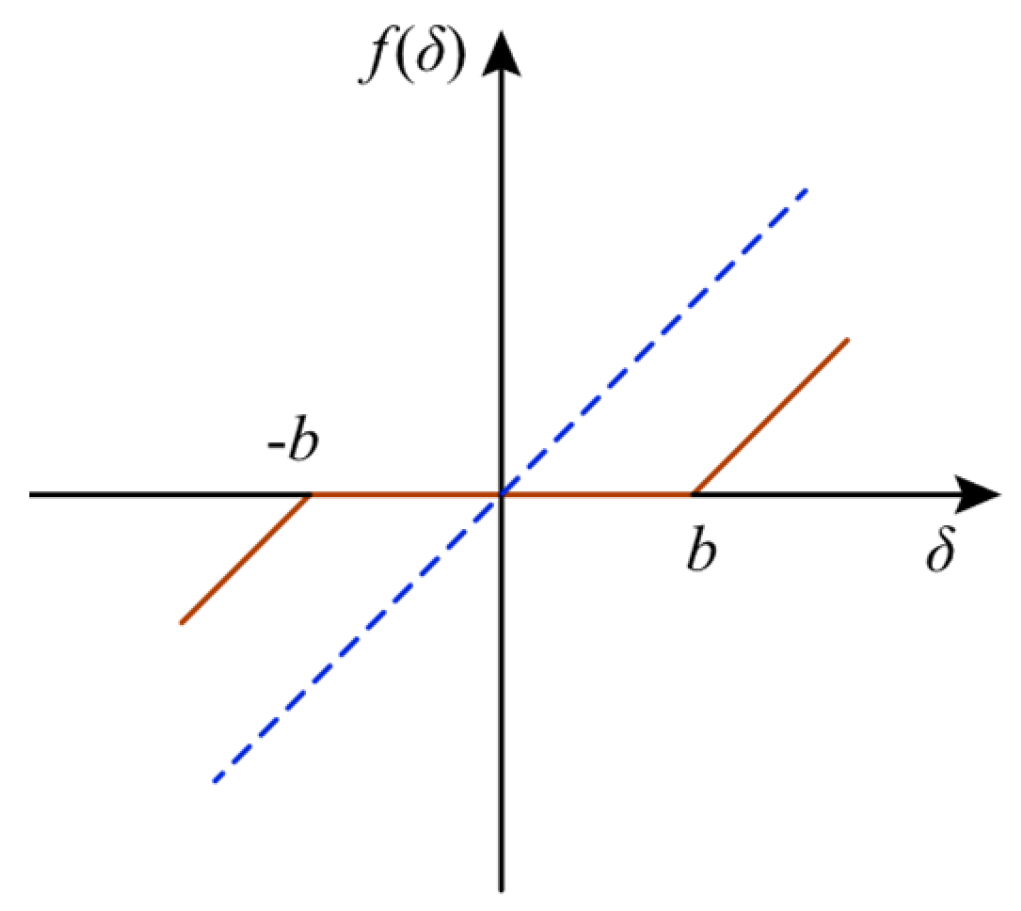
The expression of the nonlinear backlash function
f(
δ) is shown in Equation (24), where
b is half of the backlash; its function graph is shown in
Figure 12.
Figure 12.
Schematic diagram of backlash function.
Figure 12.
Schematic diagram of backlash function.
cm is the meshing damping, which is expressed as:
where
ξ is the mesh damping ratio, generally taken as 0.03~0.17;
kav is the mean mesh stiffness; and
meq,i is the equivalent mass of the gear.
Then, according to Newton’s second law, the differential equation of vibration of Input Gear 1 is:
Similarly, the differential equation for the vibration of Input Gear 2 is:
The differential equation for the vibration of Idler 1 is:
The differential equation for the vibration of Idler 2 is:
The differential equation for the vibration of the tail gear is:
The differential equation for the vibration of the lower face gear is:
The differential equation for the vibration of the upper face gear is:
2.4. Optimization Model Based on MPA
The marine predator algorithm (MPA) is a novel swarm optimization algorithm that was proposed by Faramarzi et al. [
36]. The core of this algorithm is a combination of three different foraging strategies proposed by the ideas of Lévy flight and Brownian motion. The MPA randomly initializes the prey location, updates the prey location through three foraging strategies, and finally overcomes the prematurity problem according to the FADs or vortex effect. The foraging strategy and the effect of FADs are described as follows:
(1) When the current iteration number is less than 1/3 of the maximum iteration number, the algorithm performs a global search by Brownian motion and updates the position of Prey according to Equation (33):
where stepsize is the moving step of the prey; RB is a normally distributed Brownian random vector; Elite
i is the elite matrix; Prey
i is the prey matrix; ⊗ is the term-by-term multiplication operator;
P is equal to 0.5; and
R is the rand() function.
(2) When the current number of iterations is greater than 1/3 and less than 2/3 of the maximum number of iterations, the strategy of Lévy flight in parallel with Brownian motion is used to update the position of Prey, as shown in Equations (34) and (35).
where
RL is a random number with a Lévy distribution;
; and
n is the number of prey.
(3) When the current number of iterations exceeds 2/3 of the maximum number of iterations, the algorithm updates Prey based on the Lévy motion strategy, as shown in Equation (36).
(4) Finally, the algorithm overcomes the premature convergence problem through the vortex effect or fish aggregation devices (
FADs) effect, as shown in Equation (37).
where
FADs (=0.2) is the probability of influencing the search process;
U is a binary vector;
r is a random number in the range of [0, 1]; and
r1 and
r2 are the index subscripts of the prey.
The support stiffness of the gears in a coaxial face gear split-torque transmission system has considerable influence on the load distribution and power flow [
34,
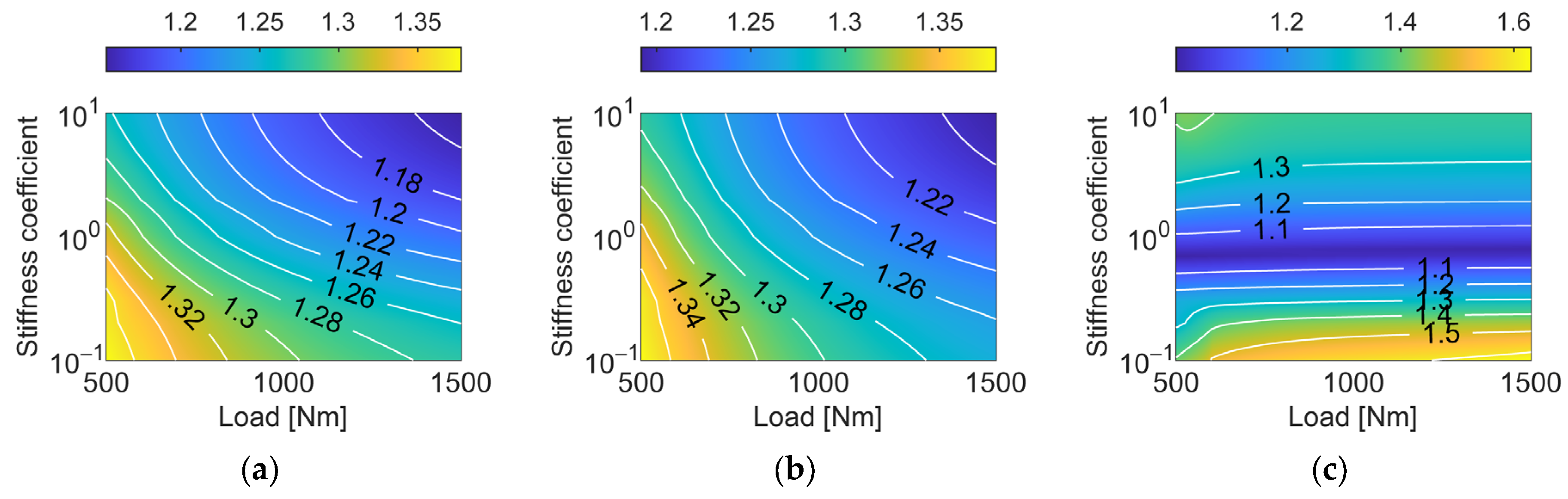
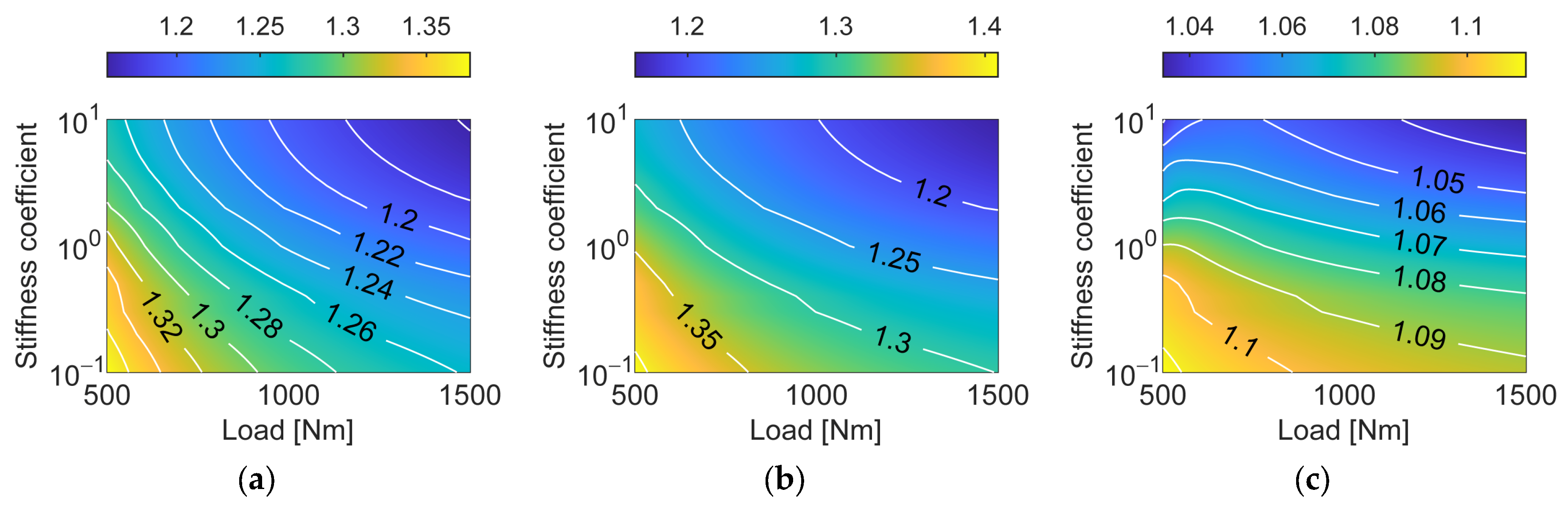
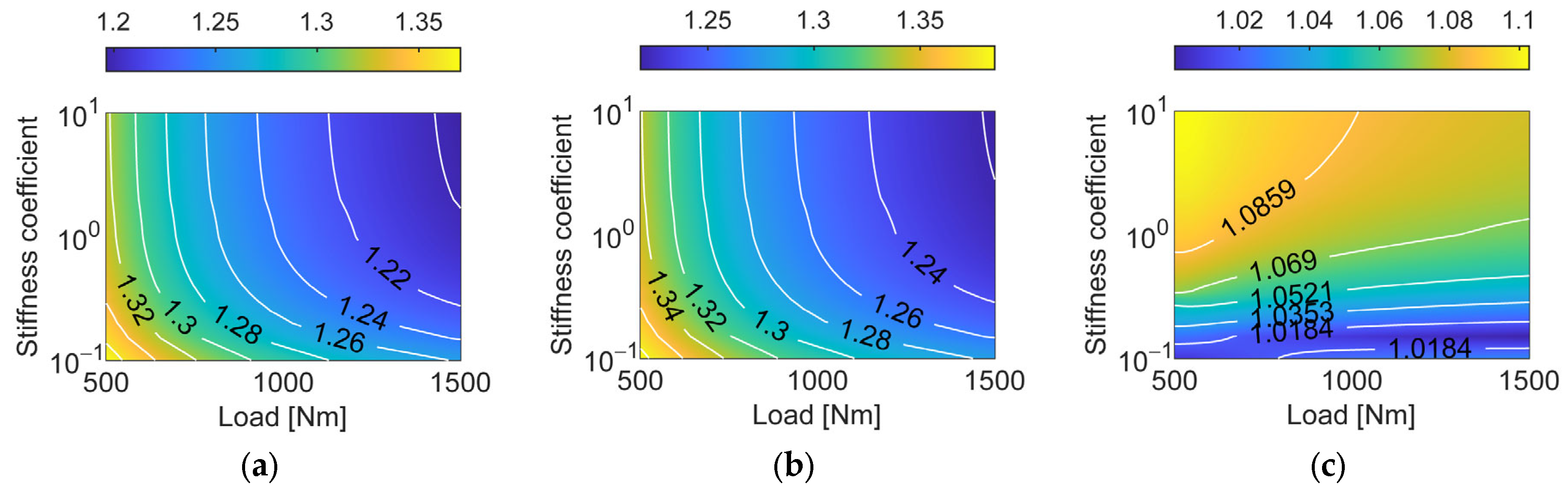
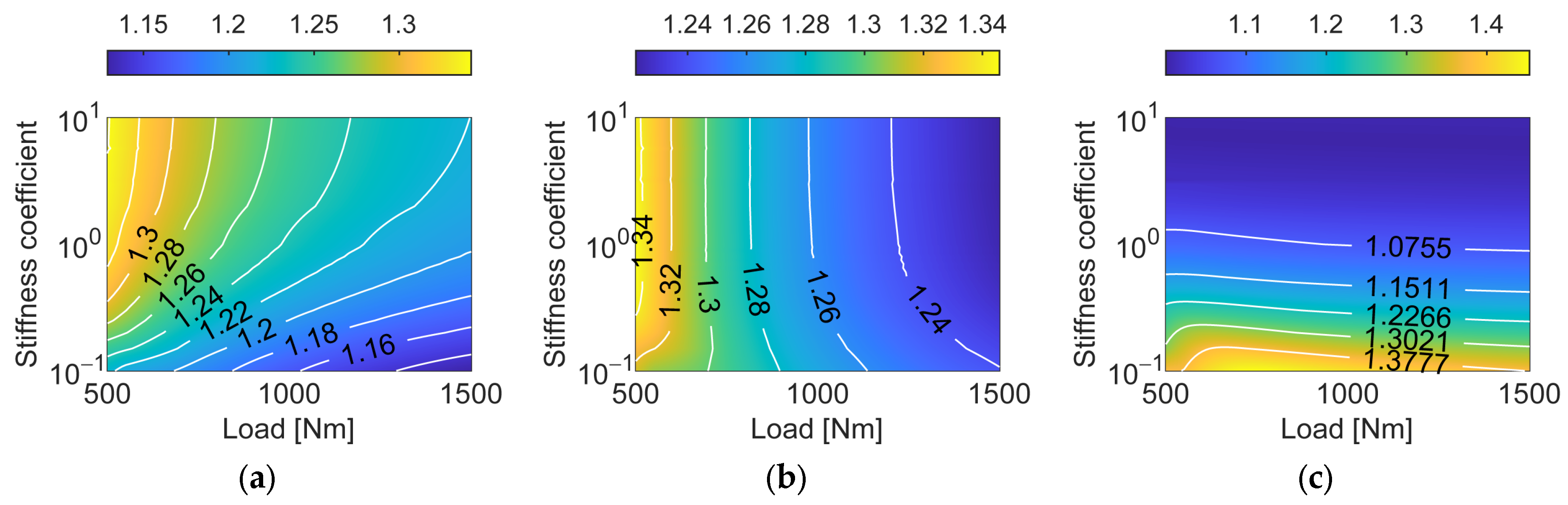
37]. The load-sharing coefficient usually expresses the balance of the load distribution; the larger the load-sharing coefficient, the more uneven the load distribution. In this study, we defined the load-sharing coefficients at Input Gears 1 and 2 and between the idler gears as:
With the support stiffness of the pinions and the upper and lower face gears as parameters and the load-sharing coefficient as the target, the mathematical model for optimizing the load-sharing performance of the CFGSTTS was constructed as follows:
where
F denotes the nonlinear mapping of the support stiffness to the optimization objective;
and
denote the support stiffness factors of Input Gears 1 and 2, respectively;
,
, and
are the support stiffness factors of Idler 1, Idler 2, and the tail gear, respectively; and
and
represent the support stiffness factors of the lower and the upper face gear, respectively.
5. Conclusions
A dynamic load-sharing model of a dual-input, dual-output, concentric gear split-torque system was established, which considered the translational and torsional vibration of gears. The correlation between the meshing stiffness and load was considered. Then, a time-varying meshing stiffness agent model was developed based on a feedforward neural network. According to the power flow characteristics of this system, two meshing states, pinion driving and face gear driving, were considered. The load-sharing characteristic analysis and optimization were completed in this study. The conclusions drawn from the study can be summarized as follows:
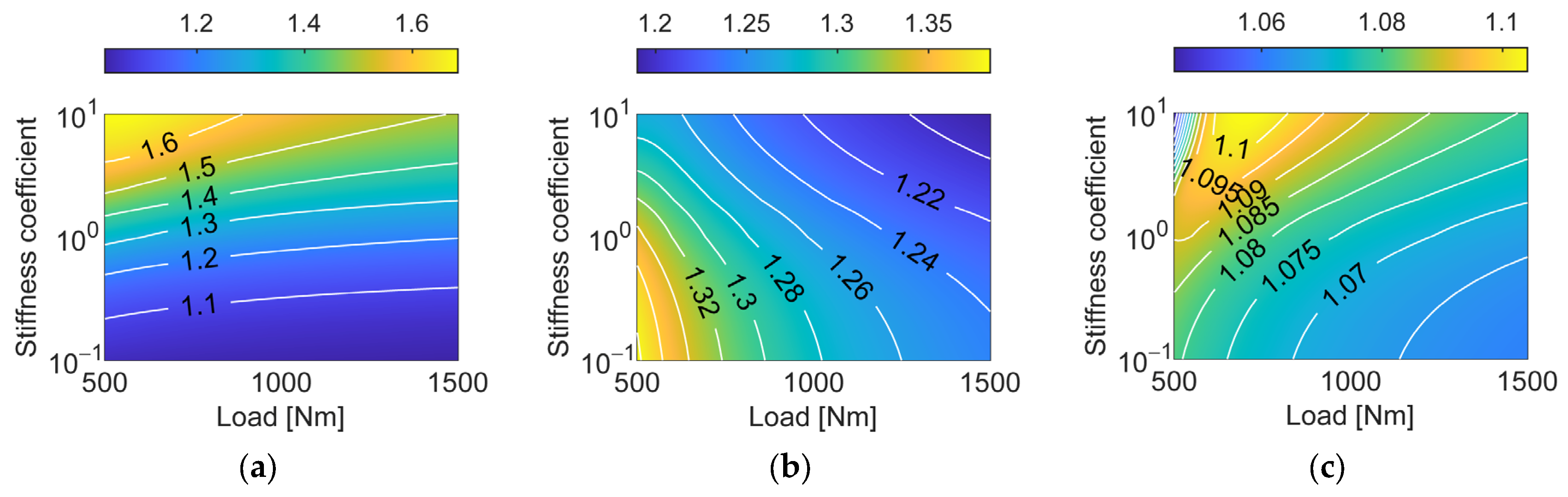
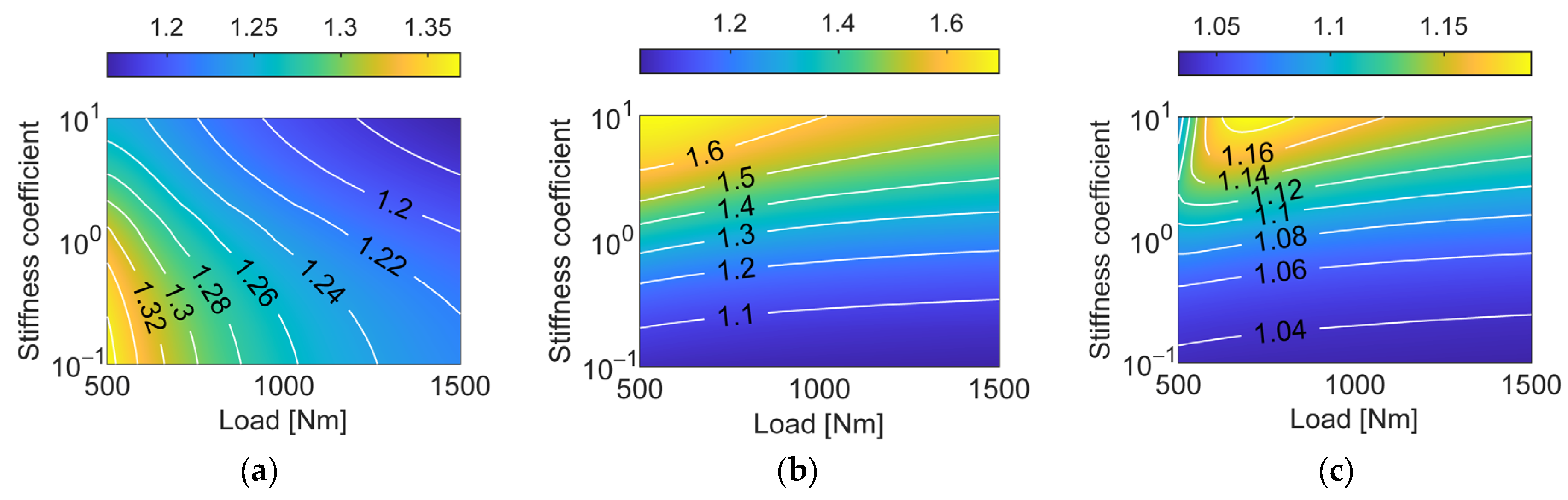
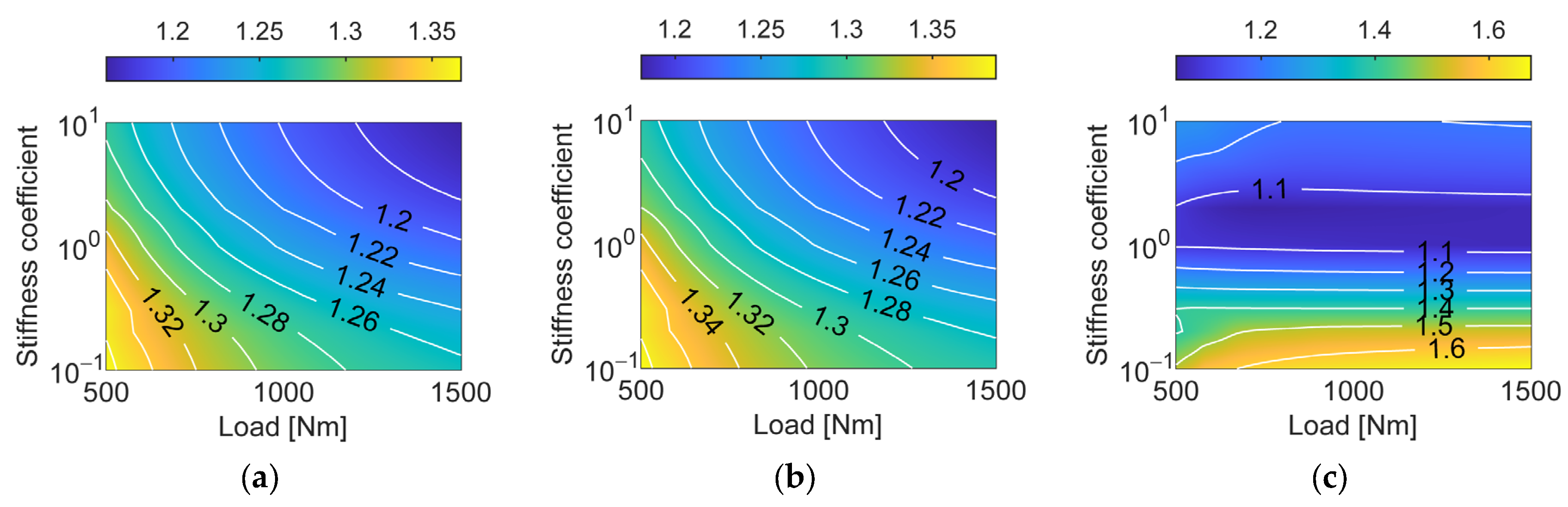
(1) The results showed that reducing the support stiffness of Input Gear 1 decreases the load-sharing coefficients. Increasing the support stiffness of the tail gear increases the load-sharing capacity. Furthermore, the support stiffness of the idlers, Input Gear 2, and upper and lower face gears have different effects on κin1, κin2, and κid and need to be comprehensively considered when adjusting the load-sharing performance.
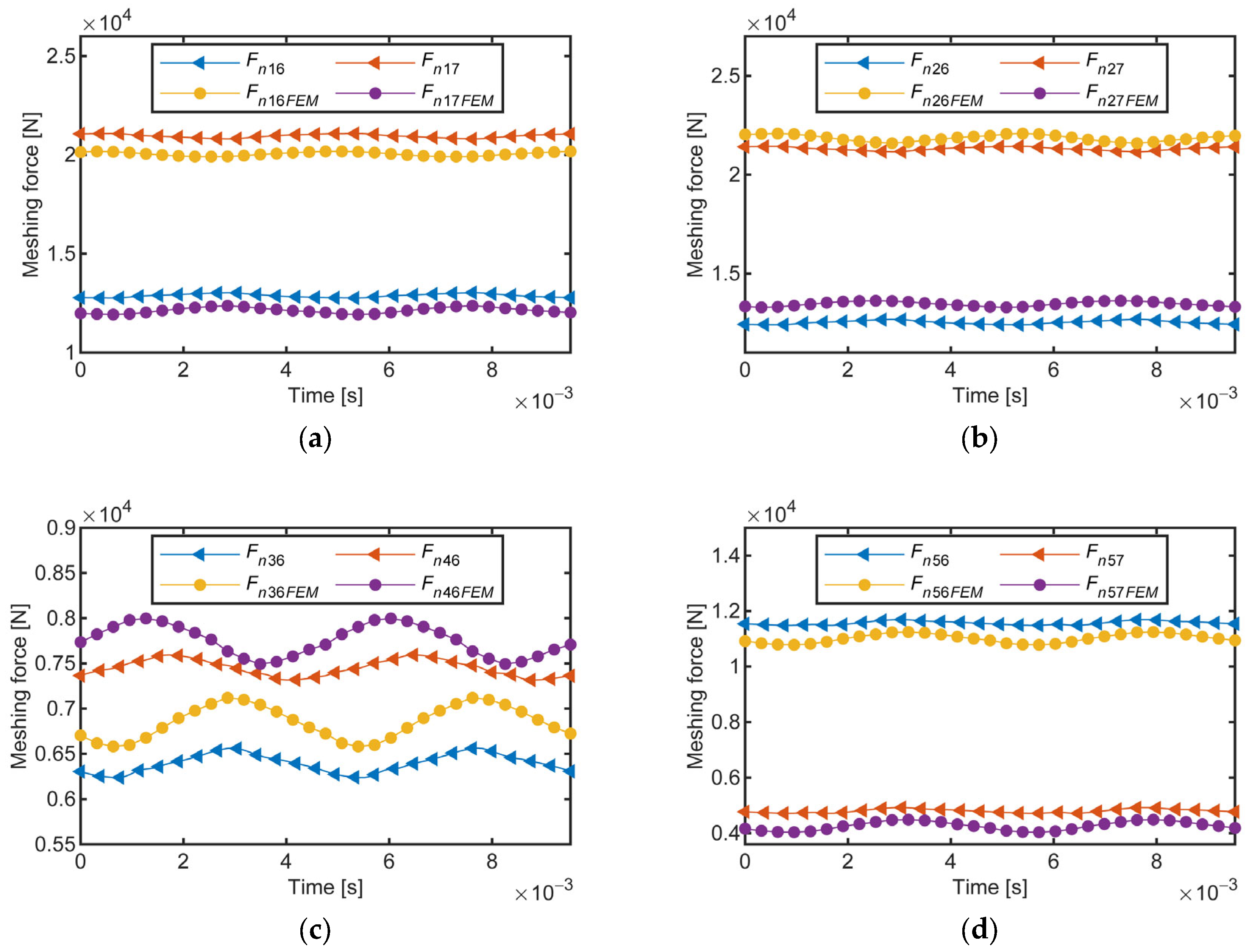
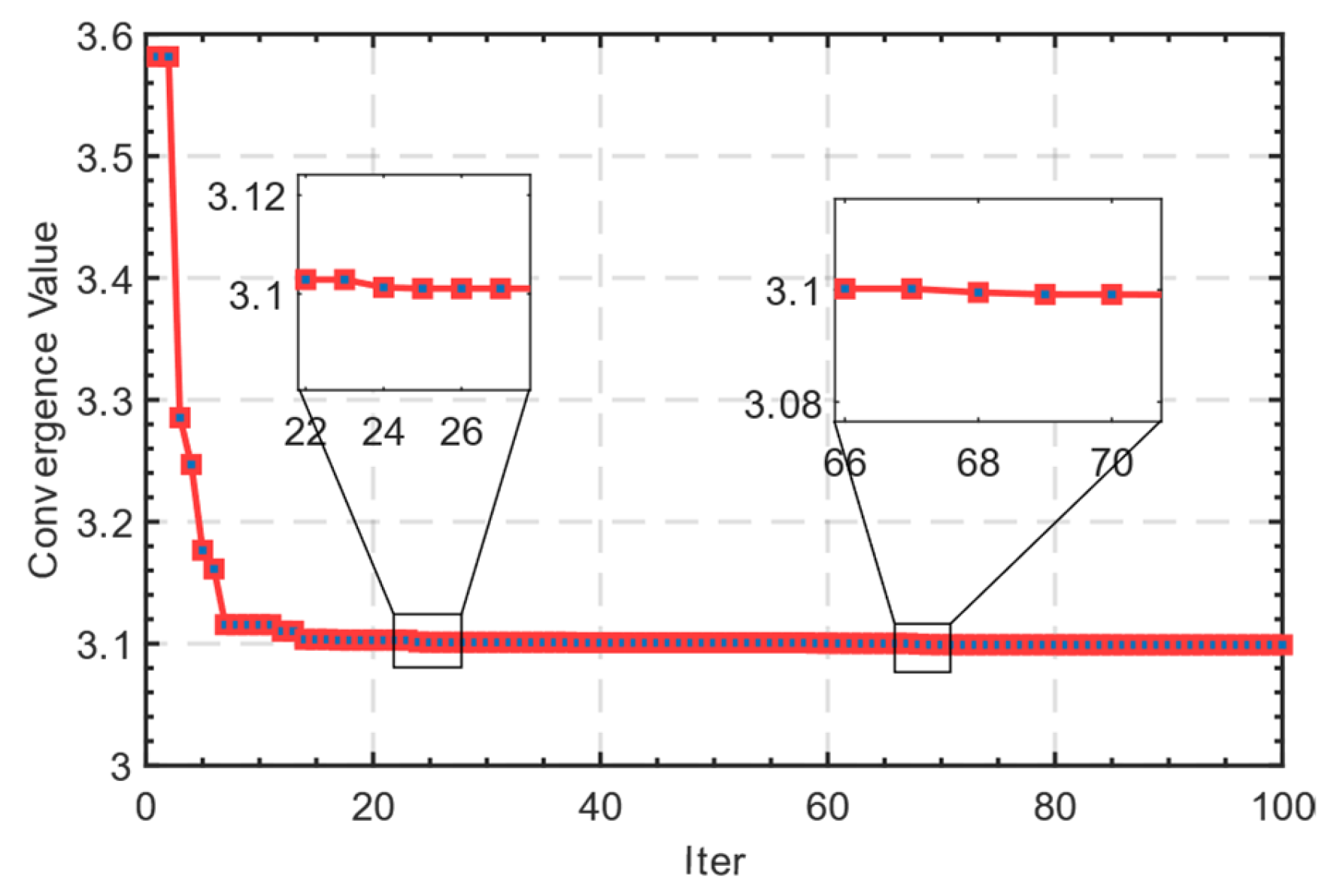
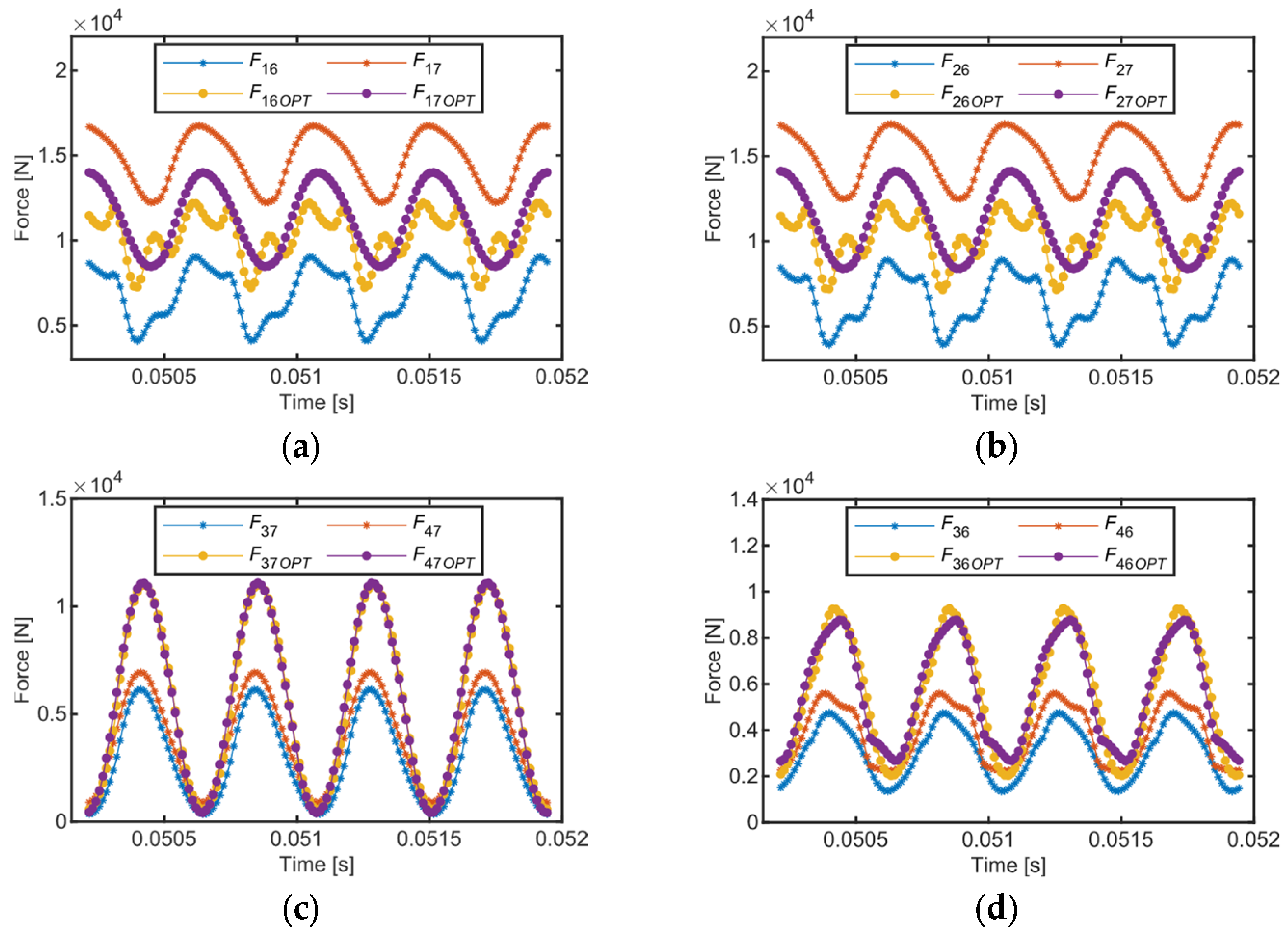
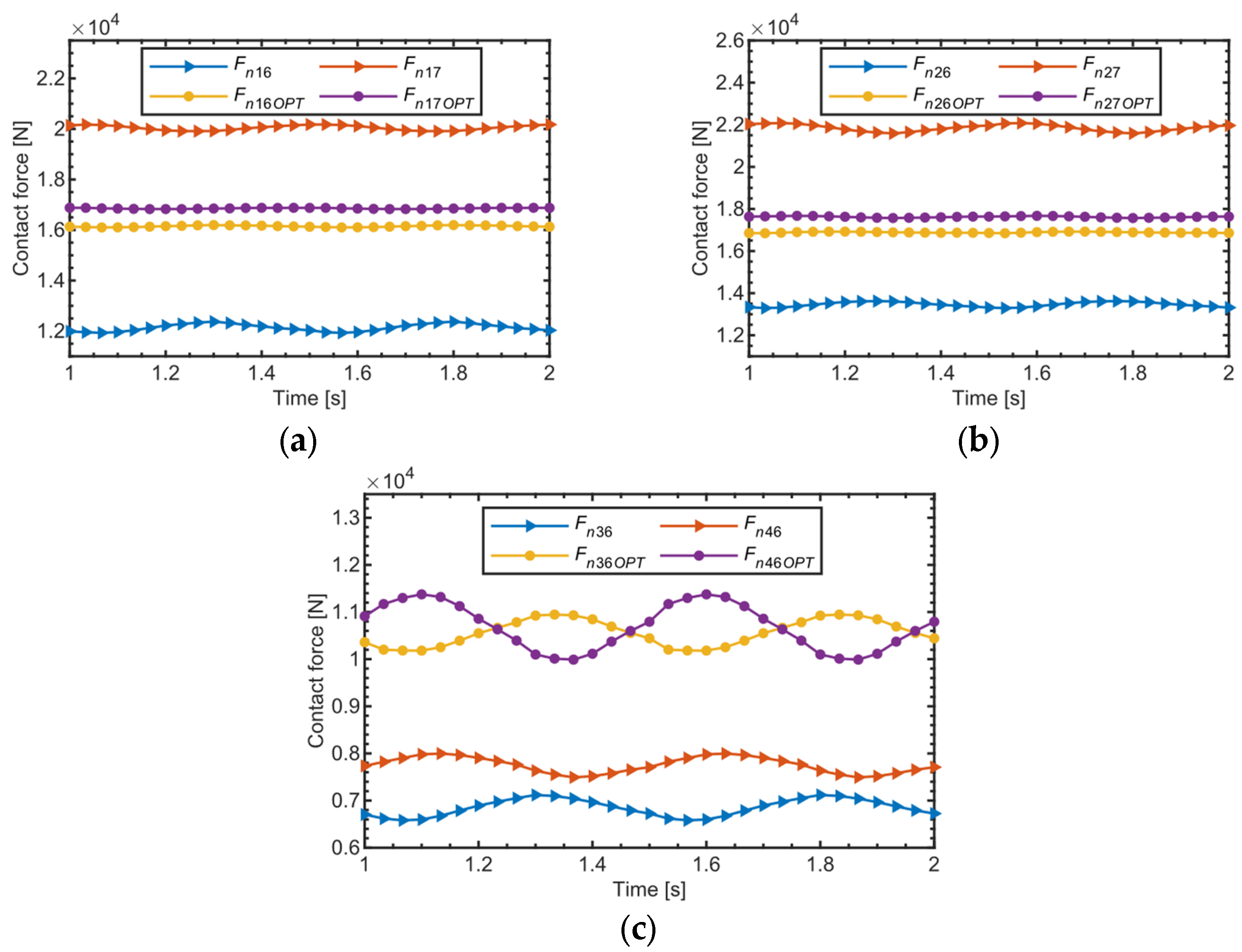
(2) Based on the marine predator optimization algorithm, the load-sharing optimization model of the concentric gear split-torque transmission system was established. The optimization results showed that the load-sharing factor decreased from 1.375, 1.388, and 1.046 to 1.049, 1.052, and 1.000, respectively. Moreover, the optimization effect was verified by comparing the gear pair meshing force before and after optimization by the finite element method.
(3) The analysis results showed that the load distribution of the gears can be more balanced by the support structure and the design of the support bearings. Therefore, the optimized support stiffness coefficients have practical importance for the design of each support bearing, as well as the support structure.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}