
Pavement Strategy Optimization of Cable-Stayed Bridges against the Negative Reaction Risks of Auxiliary Piers

 , ,
, ,
Abstract
:1. Introduction
2. Assessment Model for Negative Reaction Risks under Uncertainties
2.1. Reliability Assessment Model for the Reactions of an Auxiliary Pier
2.2. Increased Negative Reaction Risks under Uncertainties
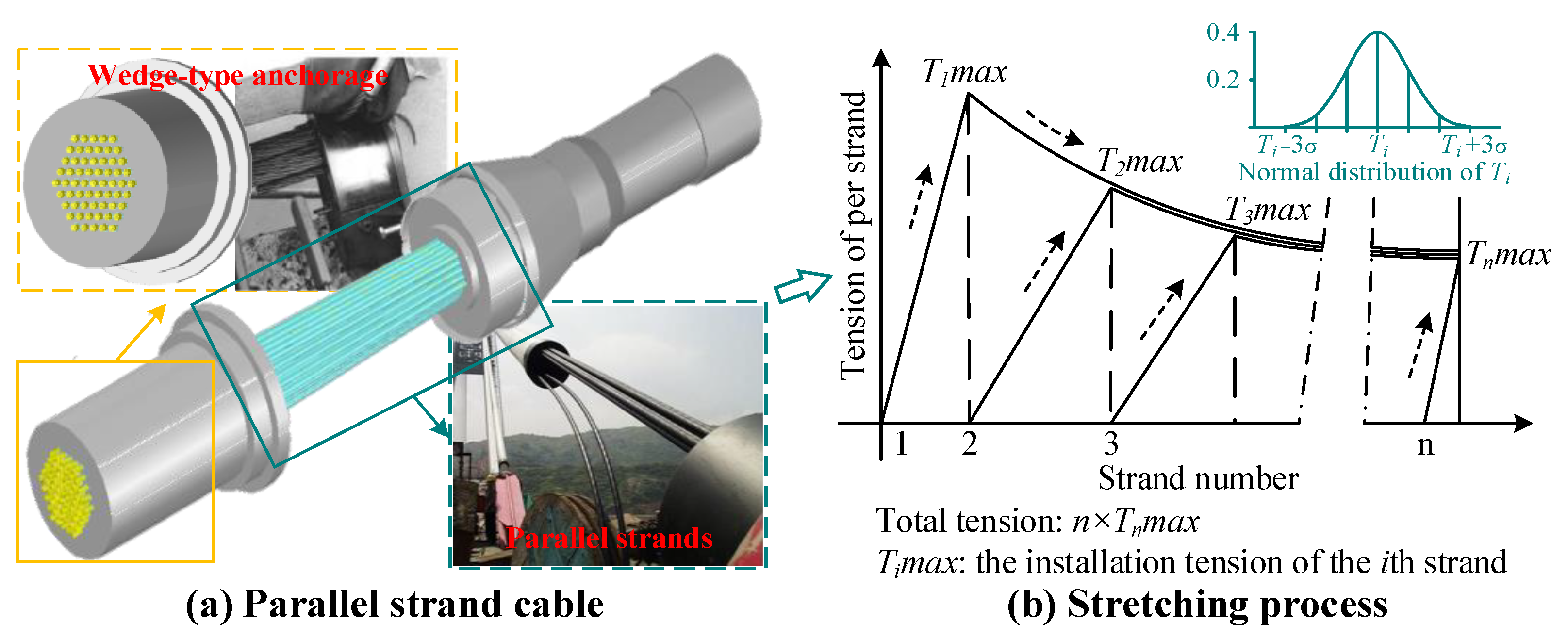
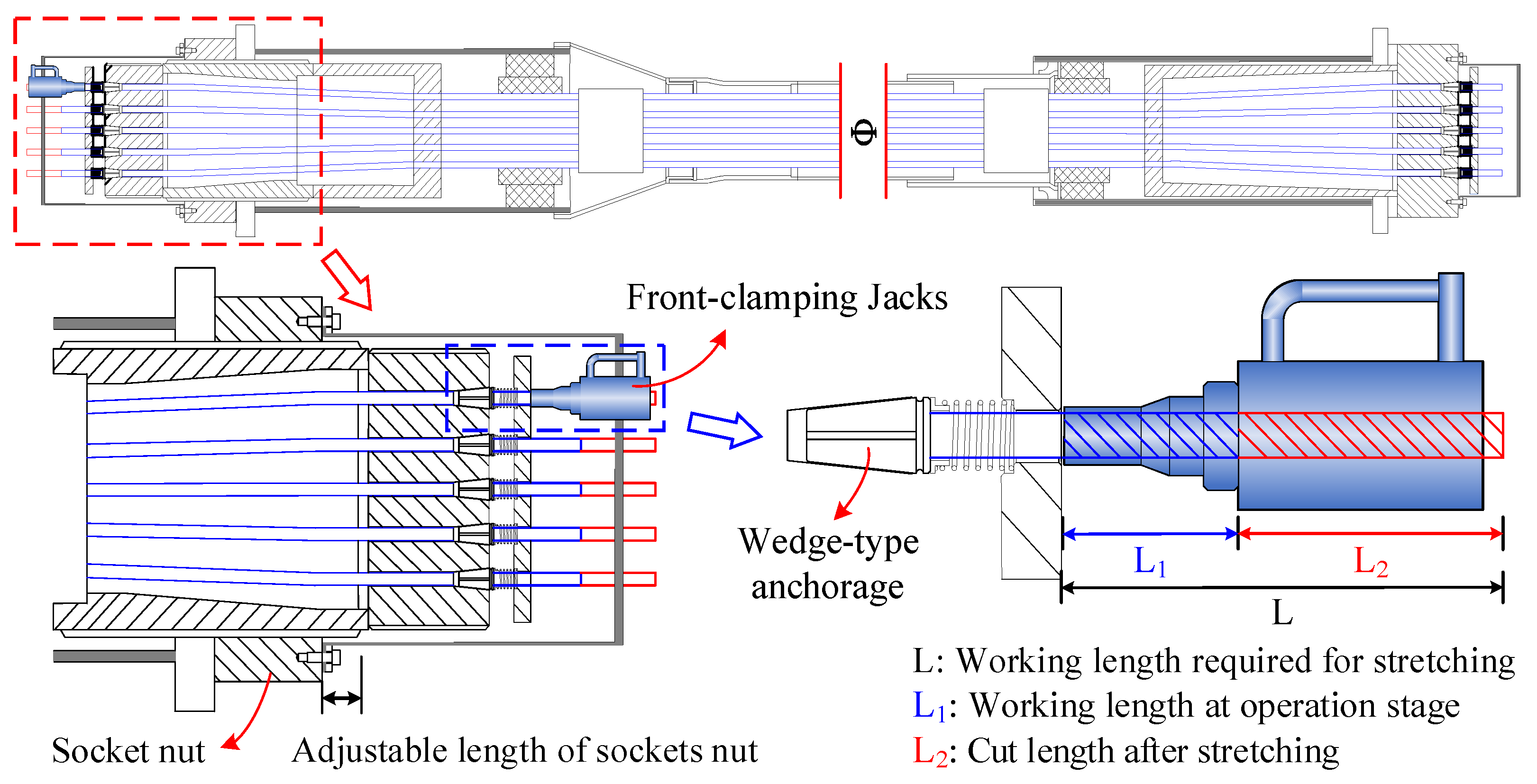
2.2.1. Stretching Process and Adjustable Length of the Parallel Strand Cable
2.2.2. NRRAP Caused by Forced Closure
2.2.3. Time-Varying Live Load
2.3. Risk Control Strategy
- (1)
- The assessment of the NRRAP under the live load is carried out based on the updated parameters. If the assessment result meets the requirements of the specification, the construction can be carried out directly; otherwise, the pavement needs to be optimized for C4;
- (2)
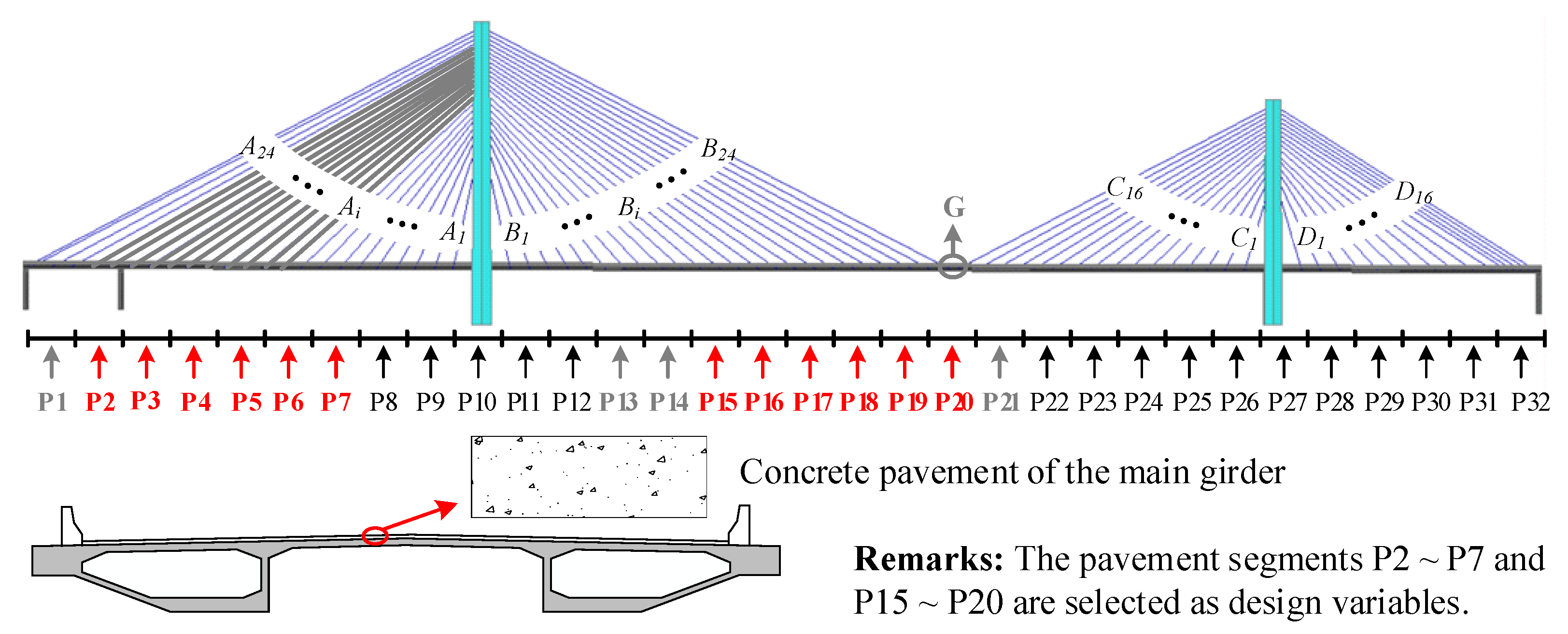
- The design variables are determined according to the sensitivity analysis results and construction status;
- (3)
- The pavement optimization problem is formulated as a multiobjective optimization problem under reliability constraints. The GRNN-based surrogate model is created for the reliability constraint function. The Pareto optimal solution set is obtained by utilizing NSGA-II to solve the RBDO problem mentioned above;
- (4)
- The optimization scheme from the Pareto optimal solution set is selected and evaluated with C1~C3. The optimization scheme is selected according to the decision-maker’s emphasis on different objectives. If it does not satisfy C1~C3, the optimization process in step 4 is repeated until the optimization scheme satisfies C1~C4 at the same time.
3. Identification of the Key Parameters Affecting the Negative Reactions
4. Surrogate-Assisted Uncertain Optimization for Pavement Strategy
4.1. Surrogate-Assisted RBDO
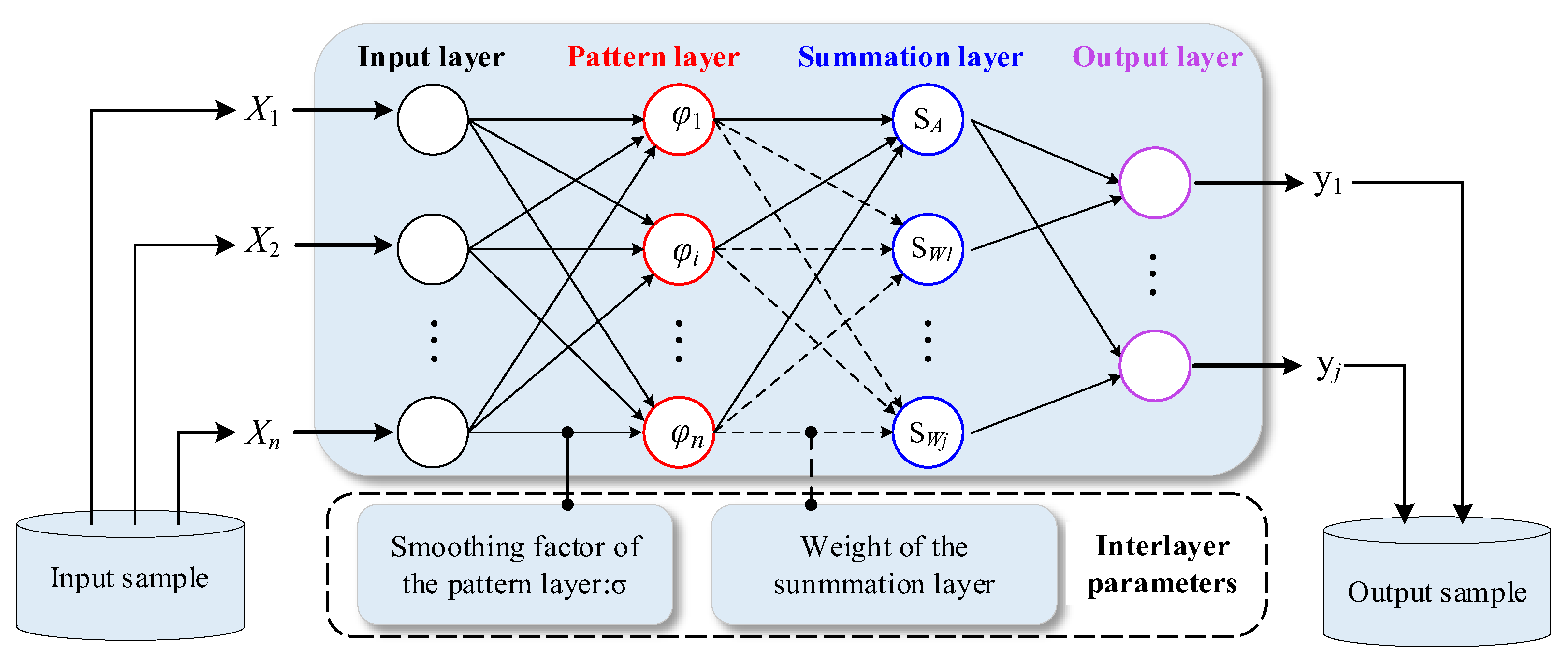
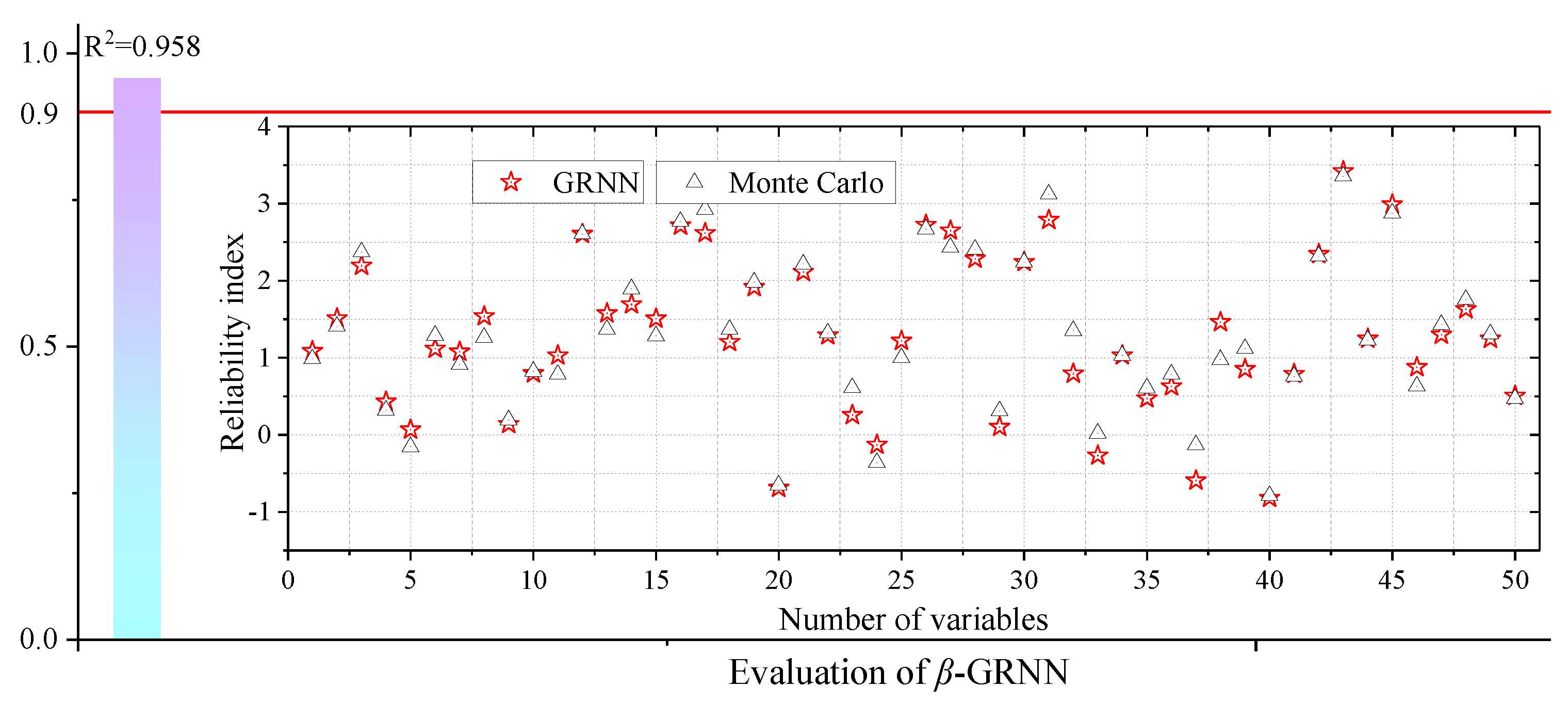
4.2. GRNN-Based Surrogate Model Generation
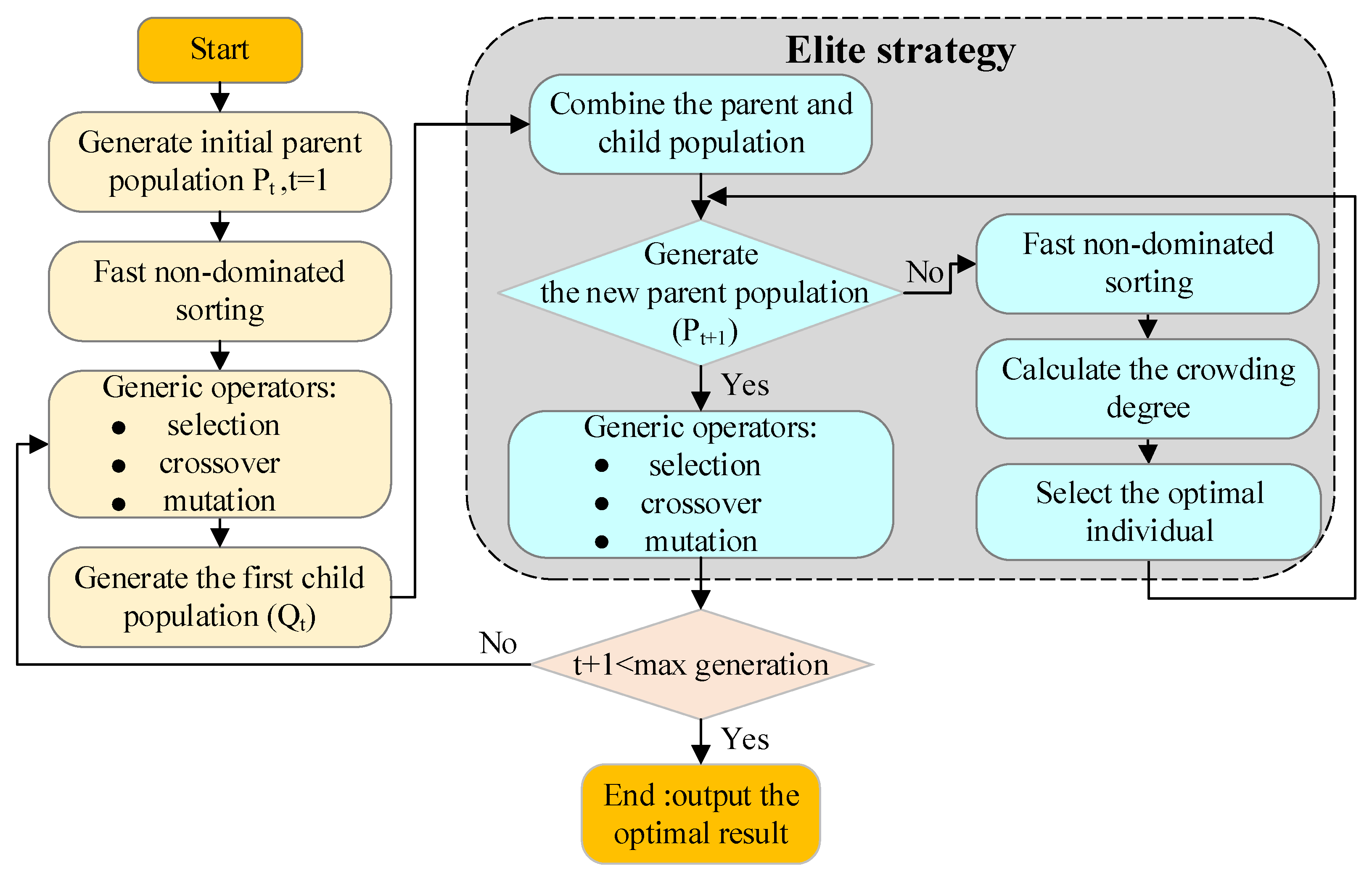
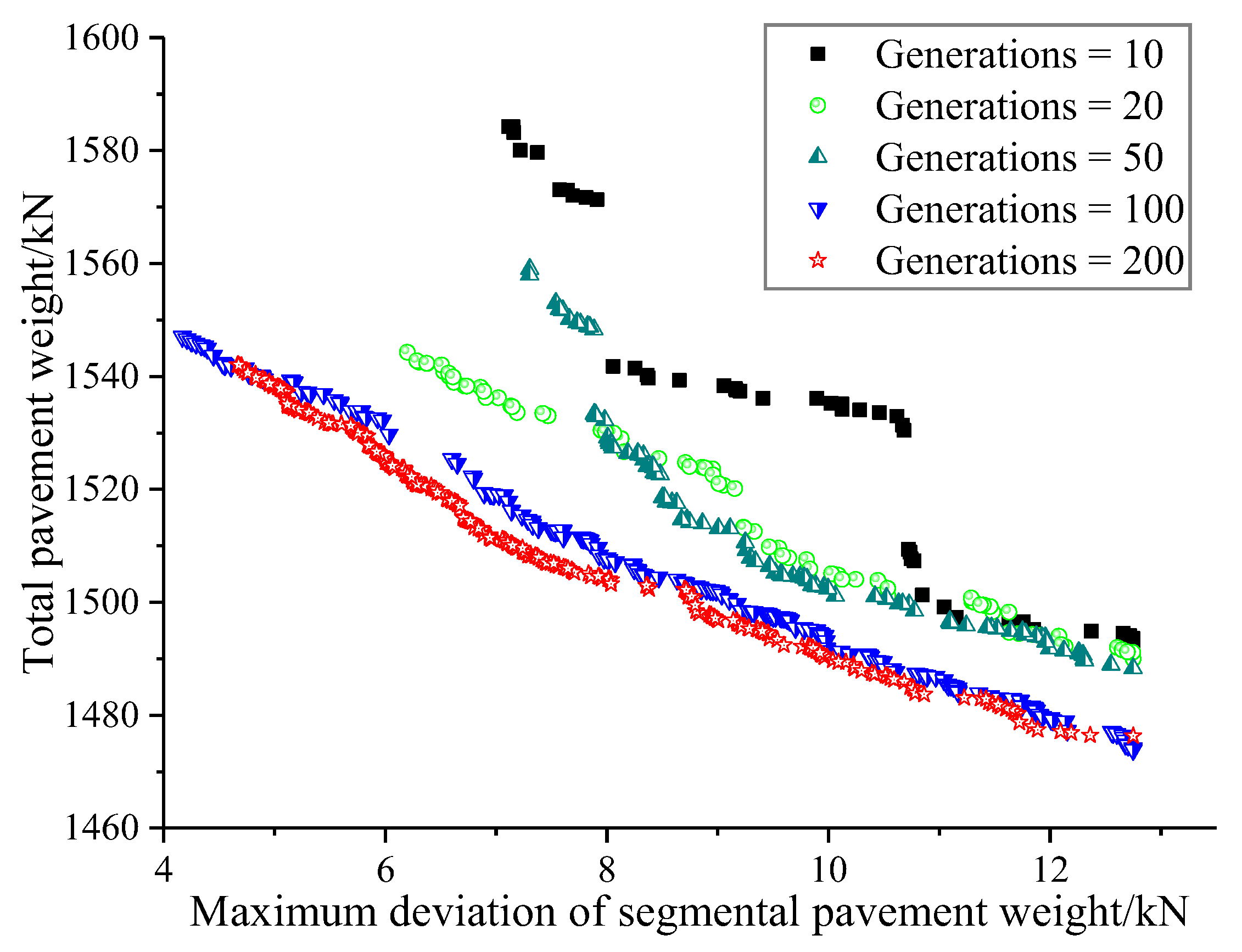
4.3. NSGA-II-Based Optimization
5. Engineering Application
5.1. Engineering Description
5.2. Negative Reaction Risk Assessment under the Live Load
5.3. RBDO for C4
5.4. Feasibility Verification for the Optimization Scheme
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| RBDO | reliability-based design optimization |
| FORM | first-order reliability method |
| GRNN | generalized regression neural network |
| NSGA-II | nondominated sorting genetic algorithm |
| LHST | Latin hypercube sampling technique |
| TPOS | three-step pavement optimization strategy |
| FEM | finite element model |
| OSS | objective service stage |
| NRRAP | negative reaction risk of the auxiliary pier |
| RAP | reaction of auxiliary pier |
Appendix A. Characteristics of the Random Variables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Design Stage | Construction Stage | DB | ||
|---|---|---|---|---|---|
| Mean | SD | Mean | SD | ||
| A24/kN | 5926.700 | 98.778 | 5926.160 | 197.539 | N |
| A23/kN | 5939.700 | 98.995 | 5956.560 | 198.552 | N |
| A22/kN | 5928.900 | 98.815 | 5959.500 | 198.650 | N |
| A21/kN | 5866.000 | 97.767 | 5905.560 | 196.852 | N |
| A20/kN | 5681.900 | 94.698 | 5729.040 | 190.968 | N |
| A19/kN | 5500.800 | 91.680 | 5549.580 | 184.986 | N |
| A18/kN | 5334.100 | 88.902 | 5375.020 | 179.167 | N |
| A17/kN | 4863.900 | 81.065 | 4893.520 | 163.117 | N |
| A16/kN | 4817.700 | 80.295 | 4810.160 | 160.339 | N |
| A15/kN | 4810.800 | 80.180 | 4783.680 | 159.456 | N |
| A14/kN | 4795.800 | 79.930 | 4749.360 | 158.312 | N |
| A13/kN | 4741.300 | 79.022 | 4677.770 | 155.926 | N |
| A12/kN | 4692.100 | 78.202 | 4615.010 | 153.834 | N |
| A11/kN | 4602.700 | 76.712 | 4513.020 | 150.434 | N |
| A10/kN | 4527.600 | 75.460 | 4431.630 | 147.721 | N |
| A9/kN | 4336.600 | 72.277 | 4242.360 | 141.412 | N |
| A8/kN | 4194.600 | 69.910 | 4105.060 | 136.835 | N |
| A7/kN | 4003.200 | 66.720 | 3918.740 | 130.625 | N |
| A6/kN | 3776.900 | 62.948 | 3703.970 | 123.466 | N |
| A5/kN | 3508.300 | 58.472 | 3457.820 | 115.261 | N |
| A4/kN | 3122.300 | 52.038 | 3098.900 | 103.297 | N |
| A3/kN | 2775.100 | 46.252 | 2797.840 | 93.261 | N |
| A2/kN | 2415.900 | 40.265 | 2501.680 | 83.389 | N |
| A1/kN | 2893.800 | 48.230 | 3037.120 | 101.237 | N |
| B1/kN | 2953.900 | 49.232 | 3045.950 | 101.532 | N |
| B2/kN | 2450.600 | 40.843 | 2490.890 | 83.030 | N |
| B3/kN | 2777.300 | 46.288 | 2766.460 | 92.215 | N |
| B4/kN | 3094.300 | 51.572 | 3050.850 | 101.695 | N |
| B5/kN | 3445.700 | 57.428 | 3384.270 | 112.809 | N |
| B6/kN | 3705.100 | 61.752 | 3631.400 | 121.047 | N |
| B7/kN | 3943.400 | 65.723 | 3861.860 | 128.729 | N |
| B8/kN | 4251.000 | 70.850 | 4159.000 | 138.633 | N |
| B9/kN | 4442.200 | 74.037 | 4346.310 | 144.877 | N |
| B10/kN | 4629.300 | 77.155 | 4525.770 | 150.859 | N |
| B11/kN | 4811.700 | 80.195 | 4697.390 | 156.580 | N |
| B12/kN | 5207.200 | 86.787 | 5066.120 | 168.871 | N |
| B13/kN | 5361.700 | 89.362 | 5205.370 | 173.512 | N |
| B14/kN | 5513.100 | 91.885 | 5348.550 | 178.285 | N |
| B15/kN | 5598.400 | 93.307 | 5433.860 | 181.129 | N |
| B16/kN | 5647.100 | 94.118 | 5492.700 | 183.090 | N |
| B17/kN | 5688.700 | 94.812 | 5550.560 | 185.019 | N |
| B18/kN | 5678.600 | 94.643 | 5567.240 | 185.575 | N |
| B19/kN | 5618.200 | 93.637 | 5542.720 | 184.757 | N |
| B20/kN | 5564.100 | 92.735 | 5532.910 | 184.430 | N |
| B21/kN | 5463.800 | 91.063 | 5484.860 | 182.829 | N |
| B22/kN | 5341.400 | 89.023 | 5424.060 | 180.802 | N |
| B23/kN | 5206.300 | 86.772 | 5355.410 | 178.514 | N |
| B24/kN | 5085.100 | 84.752 | 5301.470 | 176.716 | N |
| C16/kN | 5447.600 | 90.793 | 5351.490 | 178.383 | N |
| C15/kN | 5565.600 | 92.760 | 5433.860 | 181.129 | N |
| C14/kN | 5629.000 | 93.817 | 5471.130 | 182.371 | N |
| C13/kN | 5633.300 | 93.888 | 5461.320 | 182.044 | N |
| C12/kN | 5638.900 | 93.982 | 5459.360 | 181.979 | N |
| C11/kN | 5575.900 | 92.932 | 5394.640 | 179.821 | N |
| C10/kN | 5531.400 | 92.190 | 5353.450 | 178.448 | N |
| C9/kN | 5397.500 | 89.958 | 5225.960 | 174.199 | N |
| C8/kN | 5001.700 | 83.362 | 4855.270 | 161.842 | N |
| C7/kN | 4780.000 | 79.667 | 4649.330 | 154.978 | N |
| C6/kN | 4528.100 | 75.468 | 4413.970 | 147.132 | N |
| C5/kN | 4078.500 | 67.975 | 3995.230 | 133.174 | N |
| C4/kN | 3743.900 | 62.398 | 3685.340 | 122.845 | N |
| C3/kN | 3169.800 | 52.830 | 3144.990 | 104.833 | N |
| C2/kN | 2723.700 | 45.395 | 2747.820 | 91.594 | N |
| C1/kN | 3109.700 | 51.828 | 3183.240 | 106.108 | N |
| D1/kN | 3088.200 | 51.470 | 3190.100 | 106.337 | N |
| D2/kN | 2705.600 | 45.093 | 2745.860 | 91.529 | N |
| D3/kN | 3136.900 | 52.282 | 3118.510 | 103.950 | N |
| D4/kN | 3653.900 | 60.898 | 3601.000 | 120.033 | N |
| D5/kN | 3919.000 | 65.317 | 3841.260 | 128.042 | N |
| D6/kN | 4157.700 | 69.295 | 4077.610 | 135.920 | N |
| D7/kN | 4290.400 | 71.507 | 4212.940 | 140.431 | N |
| D8/kN | 4485.500 | 74.758 | 4419.860 | 147.329 | N |
| D9/kN | 4592.000 | 76.533 | 4538.520 | 151.284 | N |
| D10/kN | 4711.900 | 78.532 | 4663.060 | 155.435 | N |
| D11/kN | 4777.600 | 79.627 | 4725.820 | 157.527 | N |
| D12/kN | 5968.200 | 99.470 | 5926.160 | 197.539 | N |
| D13/kN | 6076.500 | 101.275 | 5956.560 | 198.552 | N |
| D14/kN | 6109.500 | 101.825 | 5959.500 | 198.650 | N |
| D15/kN | 6104.000 | 101.733 | 5905.560 | 196.852 | N |
| D16/kN | 6096.200 | 101.603 | 5729.040 | 190.968 | N |
| P1~P32/kN/m | 127.500 | 4.25 | 127.500 | 4.25 | N |
| G | 1.000 | 0.017 | 1.000 | 0.017 | N |
References
- JTG/T 3365-01-2020; Specifications for Design of Highway Cable-Stayed Bridge. China Communications Press: Beijing, China, 2020.
- Liang, F.; Jia, Y.; Sun, L.; Xie, W.; Chen, H. Seismic response of pile groups supporting long-span cable-stayed bridge subjected to multi-support excitations. Soil Dyn. Earthq. Eng. 2017, 101, 182–203. [Google Scholar] [CrossRef]
- Guo, S.; Cui, D.; Ma, S. Auxiliary Piers on Long-Span Specially Shaped Mixed Steel Structure Main Tower Cable-Stayed Bridge: Research on the Impact on the Dynamic Performance. Adv. Mater. Sci. Eng. 2021, 2021, 1980387. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, M.; Jiang, X.; Yuan, R.; Yu, J.; Zhou, Y.; Qin, S. Causes and control to lateral displacement of the main girder in the super-long-span cable-stayed bridge with transverse asymmetry dead load. Structures 2022, 37, 168–184. [Google Scholar] [CrossRef]
- Lin, K.; Xu, Y.-L.; Lu, X.; Guan, Z.; Li, J. Digital twin-based collapse fragility assessment of a long-span cable-stayed bridge under strong earthquakes. Autom. Constr. 2021, 123, 103547. [Google Scholar] [CrossRef]
- Fabbrocino, F.; Modano, M.; Farina, I.; Carpentieri, G.; Fraternali, F. Optimal prestress design of composite cable-stayed bridges. Compos. Struct. 2017, 169, 167–172. [Google Scholar] [CrossRef]
- Wang, X.; Wu, W.; Liu, Y.; Ran, Z. Surrogate-assisted two-phase tensioning strategy optimization for the system transformation process of a cable-stayed bridge. Eng. Optim. 2019, 52, 603–619. [Google Scholar] [CrossRef]
- Wang, X.; Miao, C.; Wang, X. Prediction analysis of deflection in the construction of composite box-girder bridge with corrugated steel webs based on MEC-BP neural networks. Structures 2021, 32, 691–700. [Google Scholar] [CrossRef]
- Chen, T.-Y. An Interval-Valued Pythagorean Fuzzy Compromise Approach with Correlation-Based Closeness Indices for Multiple-Criteria Decision Analysis of Bridge Construction Methods. Complexity 2018, 2018, 6463039. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.; He, W.; Peng, H. Prediction of bridge maximum load effects under growing traffic using non-stationary bayesian method. Eng. Struct. 2019, 185, 171–183. [Google Scholar] [CrossRef]
- Cao, H.; Chen, Y.; Yang, L.; Feng, L. Hanger pre-tensioning force optimization of steel tied-arch bridges considering operational loads. Struct. Multidiscip. Optim. 2020, 63, 867–880. [Google Scholar] [CrossRef]
- Martins, A.M.; Simões, L.M.; Negrão, J.H. Optimization of cable-stayed bridges: A literature survey. Adv. Eng. Softw. 2020, 149, 102829. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, N.; Cheng, Q. Multi-objective optimization-based reasonable finished state in long-span cable-stayed bridge considering counterweights. Structures 2023, 51, 1497–1506. [Google Scholar] [CrossRef]
- Zhang, Y.T.; Li, X.; You, X.P. Construction Technology of Jiu-Jiang Yangtze River Highway Bridge. Appl. Mech. Mater. 2014, 501–504, 1274–1278. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, Z.; Dong, C.; Huang, Y. Fast Algorithm and Its Application in Construction Monitoring of Parallel Strand Cables. J. Bridg. Eng. 2015, 20, 04014100. [Google Scholar] [CrossRef]
- Song, C.; Xiao, R.; Sun, B. Optimization of cable pre-tension forces in long-span cable-stayed bridges considering the counterweight. Eng. Struct. 2018, 172, 919–928. [Google Scholar] [CrossRef]
- Farré-Checa, J.; Komarizadehasl, S.; Ma, H.; Lozano-Galant, J.; Turmo, J. Direct simulation of the tensioning process of cable-stayed bridge cantilever construction. Autom. Constr. 2022, 137, 104197. [Google Scholar] [CrossRef]
- Li, Z.; Lu, D.; Gao, X. Optimization of mixture proportions by statistical experimental design using response surface method—A review. J. Build. Eng. 2020, 36, 102101. [Google Scholar] [CrossRef]
- Yu, H.; Zhou, X.; Zhang, X.; Mooney, M. Enhancing earth pressure balance tunnel boring machine performance with support vector regression and particle swarm optimization. Autom. Constr. 2022, 142, 104457. [Google Scholar] [CrossRef]
- Falcone, R.; Ciaramella, A.; Carrabs, F.; Strisciuglio, N.; Martinelli, E. Artificial neural network for technical feasibility prediction of seismic retrofitting in existing RC structures. Structures 2022, 41, 1220–1234. [Google Scholar] [CrossRef]
- Maschio, C.; Schiozer, D.J. A new optimization framework using genetic algorithm and artificial neural network to reduce uncertainties in petroleum reservoir models. Eng. Optim. 2014, 47, 72–86. [Google Scholar] [CrossRef]
- Li, X.; Zhu, H.; Chen, Z.; Ming, W.; Cao, Y.; He, W.; Ma, J. Limit state Kriging modeling for reliability-based design optimization through classification uncertainty quantification. Reliab. Eng. Syst. Saf. 2022, 224, 108539. [Google Scholar] [CrossRef]
- Keshtegar, B.; Mert, C.; Kisi, O. Comparison of four heuristic regression techniques in solar radiation modeling: Kriging method vs RSM, MARS and M5 model tree. Renew. Sustain. Energy Rev. 2018, 81, 330–341. [Google Scholar] [CrossRef]
- Chiang, Y.-C.; Borgart, A. A form-finding method for membrane shells with radial basis functions. Eng. Struct. 2021, 251, 113514. [Google Scholar] [CrossRef]
- Eghtedaei, R.; Abdi-Khanghah, M.; Najar, B.S.; Baghban, A. Viscosity estimation of mixed oil using RBF-ANN approach. Pet. Sci. Technol. 2017, 35, 1731–1736. [Google Scholar] [CrossRef]
- Xiang, Z.; Zhu, Z. Multi-objective optimization of a composite orthotropic bridge with RSM and NSGA-II algorithm. J. Constr. Steel Res. 2021, 188, 106938. [Google Scholar] [CrossRef]
- Wang, X.; Wang, H.; Sun, Y.; Liu, Y.; Liu, Y.; Liang, P.; Bai, Y. Fault-tolerant interval inversion for accelerated bridge construction based on geometric nonlinear redundancy of cable system. Autom. Constr. 2022, 134, 104093. [Google Scholar] [CrossRef]
- Bakhshinezhad, S.; Mohebbi, M. Multi-objective optimal design of semi-active fluid viscous dampers for nonlinear structures using NSGA-II. Structures 2020, 24, 678–689. [Google Scholar] [CrossRef]
- Deng, X.; Liu, M. Nonlinear Stability Analysis of a Composite Girder Cable-Stayed Bridge with Three Pylons during Construction. Math. Probl. Eng. 2015, 2015, 978514. [Google Scholar] [CrossRef] [Green Version]
- JTG 2120-2020; Unified Standard for Reliability Design of Highway Engineering Structures. China Communications Press: Beijing, China, 2020.
- Lu, N.; Ma, Y.; Liu, Y. Evaluating Probabilistic Traffic Load Effects on Large Bridges Using Long-Term Traffic Monitoring Data. Sensors 2019, 19, 5056. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, Y.; Han, W.; Xie, Q.; Li, G.; Xu, X. Time-dependent Reliability Assessment of Concrete Bridges Considering Non-stationary Vehicle Load and Resistance Deterioration Process. China J. Highw. Transp. 2020, 33, 85–96. [Google Scholar]
- Kriegesmann, B.; Lüdeker, J.K. Robust compliance topology optimization using the first-order second-moment method. Struct. Multidiscip. Optim. 2019, 60, 269–286. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Q.; Huang, Y. A new sensitivity factor for structural reliability. Eng. Mech. 2015, 30, 16–21. [Google Scholar]
- Ni, P.; Li, J.; Hao, H.; Zhou, H. Reliability based design optimization of bridges considering bridge-vehicle interaction by Kriging surrogate model. Eng. Struct. 2021, 246, 112989. [Google Scholar] [CrossRef]
- Kusano, I.; Baldomir, A.; Jurado, J.A.; Hernández, S. Reliability based design optimization of long-span bridges considering flutter. J. Wind. Eng. Ind. Aerodyn. 2014, 135, 149–162. [Google Scholar] [CrossRef]
- Verma, S.; Pant, M.; Snasel, V. A Comprehensive Review on NSGA-II for Multi-Objective Combinatorial Optimization Problems. IEEE Access 2021, 9, 57757–57791. [Google Scholar] [CrossRef]
- Shields, M.D.; Zhang, J. The generalization of Latin hypercube sampling. Reliab. Eng. Syst. Saf. 2016, 148, 96–108. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi, F.; Yu, Y.; Zhu, X.; Li, J. Damage identification of steel-concrete composite beams based on modal strain energy changes through general regression neural network. Eng. Struct. 2021, 244, 112824. [Google Scholar] [CrossRef]
- Bendu, H.; Deepak, B.; Murugan, S. Multi-objective optimization of ethanol fuelled HCCI engine performance using hybrid GRNN–PSO. Appl. Energy 2017, 187, 601–611. [Google Scholar] [CrossRef]
- Masoomzadeh, M.; Basim, M.C.; Chenaghlou, M.R.; Khajehsaeid, H. Probabilistic performance assessment of eccentric braced frames using artificial neural networks combined with correlation latin hypercube sampling. Structures 2023, 48, 226–240. [Google Scholar] [CrossRef]
- JTG/T F30-2014; Technical Guidelines for Construction of Highway Cement Concrete Pavements. China Communications Press: Beijing, China, 2014.
- Yang, Y.; Liu, Z.; Tang, H.; Peng, J. Deflection-based failure probability analysis of low shrinkage-creep concrete structures in presence of non-stationary evolution of shrinkage and creep uncertainties. Constr. Build. Mater. 2023, 376, 131077. [Google Scholar] [CrossRef]



















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, Y.; Wang, X.; Wang, X.; Wang, H.; Tchuente, N.F.C.; Wu, W. Pavement Strategy Optimization of Cable-Stayed Bridges against the Negative Reaction Risks of Auxiliary Piers. Appl. Sci. 2023, 13, 4877. https://doi.org/10.3390/app13084877
Bai Y, Wang X, Wang X, Wang H, Tchuente NFC, Wu W. Pavement Strategy Optimization of Cable-Stayed Bridges against the Negative Reaction Risks of Auxiliary Piers. Applied Sciences. 2023; 13(8):4877. https://doi.org/10.3390/app13084877
Chicago/Turabian StyleBai, Yunteng, Xiaoming Wang, Xudong Wang, Huan Wang, N. Frederic C. Tchuente, and Wentao Wu. 2023. "Pavement Strategy Optimization of Cable-Stayed Bridges against the Negative Reaction Risks of Auxiliary Piers" Applied Sciences 13, no. 8: 4877. https://doi.org/10.3390/app13084877
APA StyleBai, Y., Wang, X., Wang, X., Wang, H., Tchuente, N. F. C., & Wu, W. (2023). Pavement Strategy Optimization of Cable-Stayed Bridges against the Negative Reaction Risks of Auxiliary Piers. Applied Sciences, 13(8), 4877. https://doi.org/10.3390/app13084877