
The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer


Abstract
:1. Introduction
2. Related Work
2.1. T-L Model
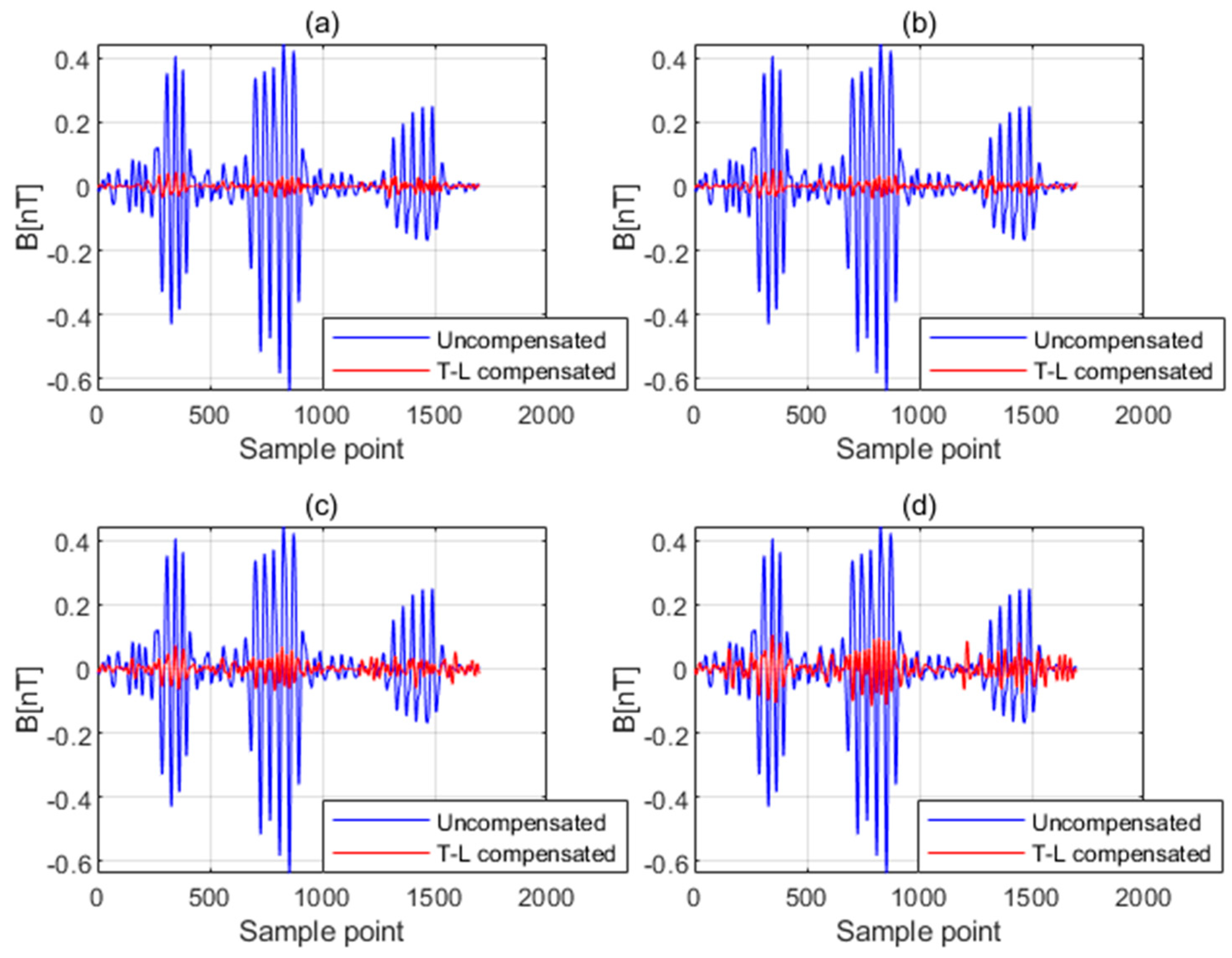
2.2. The Compensation Influence of the Fluxgate Magnetometer Noise
3. Proposed Method
3.1. Compensation Principle
3.2. Compensation Schemes
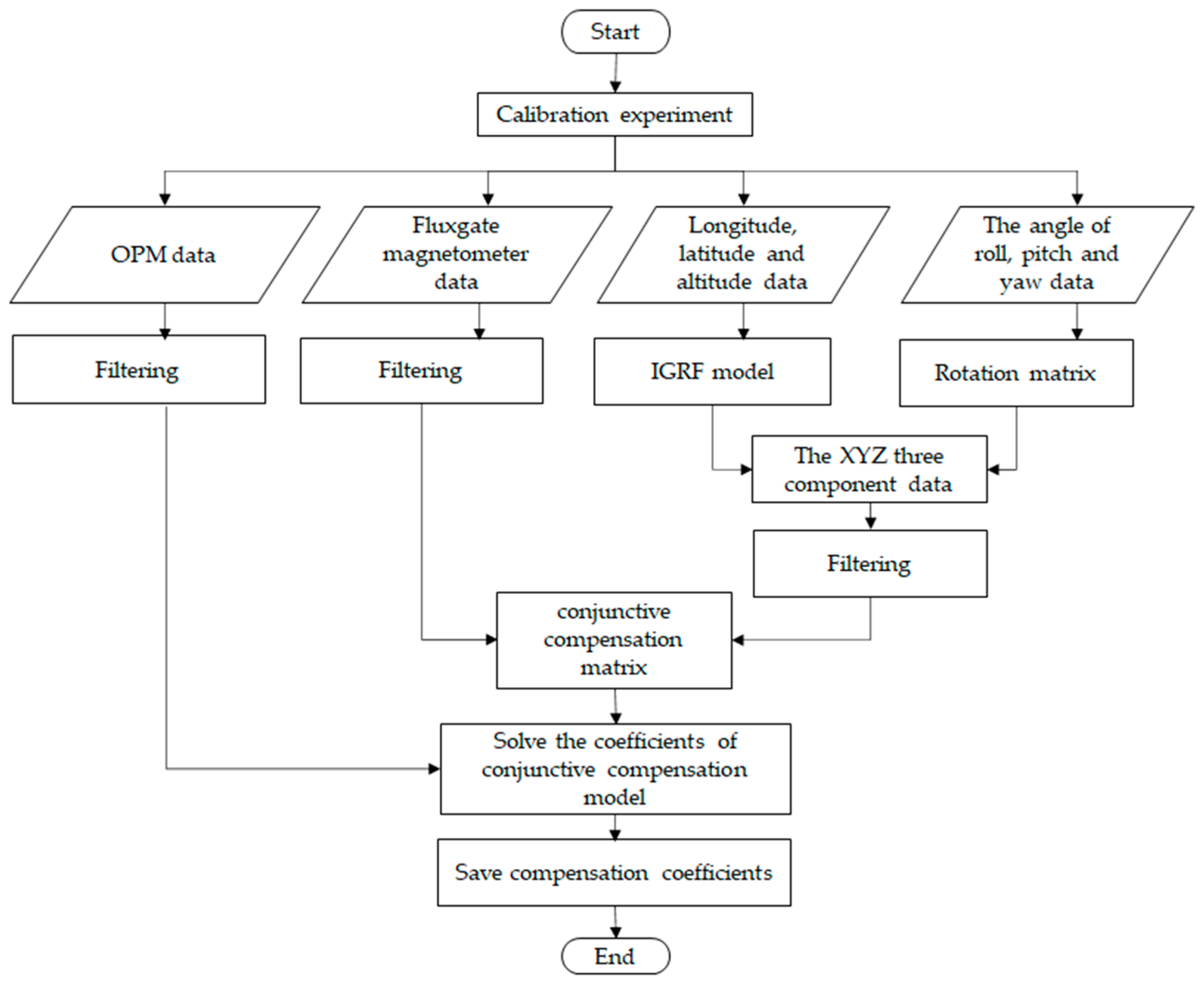
- Obtain the original magnetic data from the OPM and preprocess the magnetic data, mainly filtering;
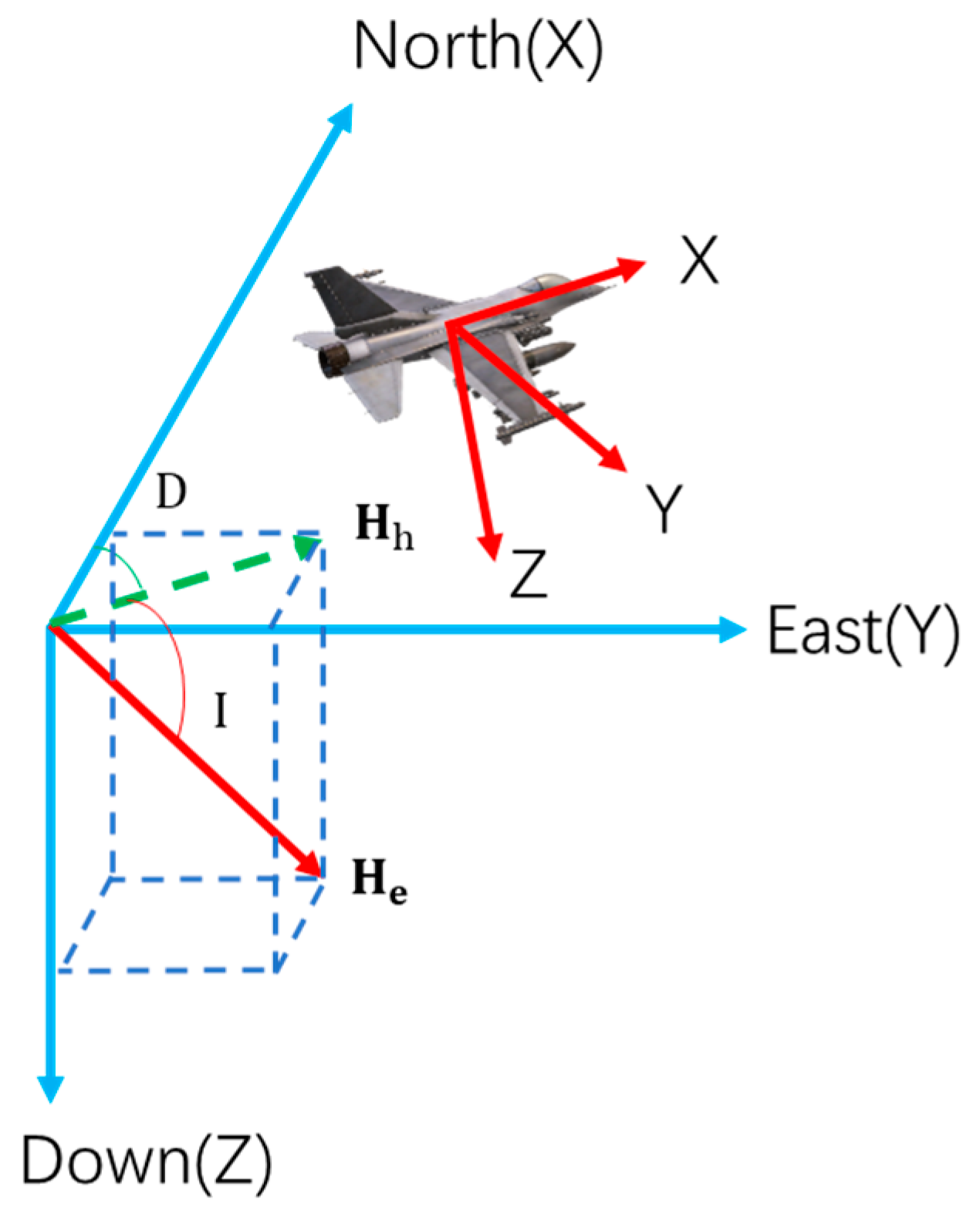
- Bring the longitude, latitude, and altitude data in GPS into the IGRF and the XYZ three components of the geomagnetic field in the geodetic coordinate system are calculated by IGRF. Bring the angle of roll, pitch, and yaw in INS into the rotation matrix and the XYZ three components of the geomagnetic field in the aircraft coordinate system are calculated by (17)~(19);
- The same filtering process is used for OPM data, fluxgate magnetometer data, and XYZ three-component data calculated through INS/GPS data, and the conjunctive compensation matrix is constructed in (23) and (24);
- Calculate the 36 compensation coefficients by the least square algorithm (LS);
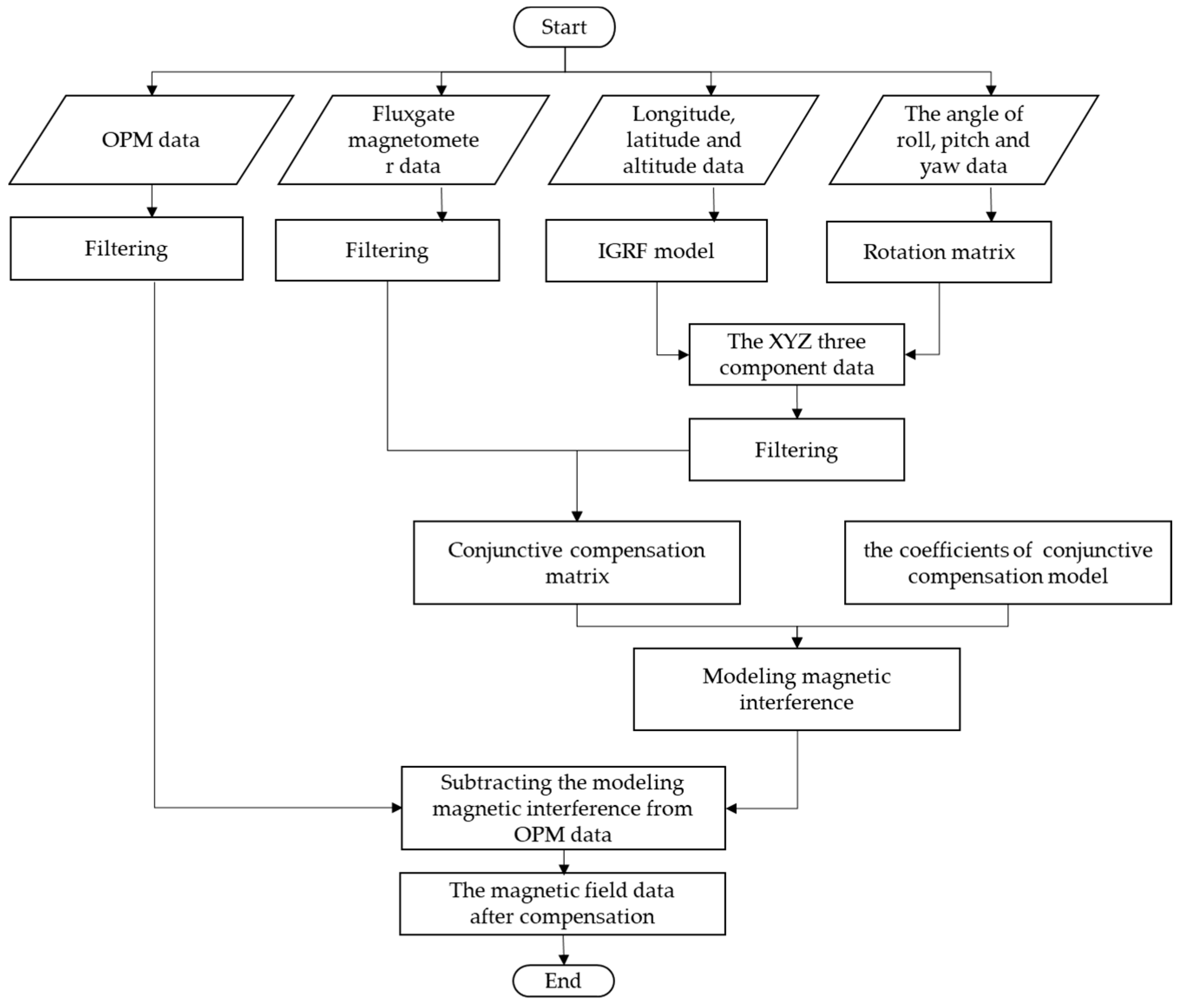
- The modeling interference is calculated by the conjunctive compensation matrix and the compensation coefficients. The modeling interference is subtracted from the filtered OPM data to generate the magnetic field data after compensation.
4. Results
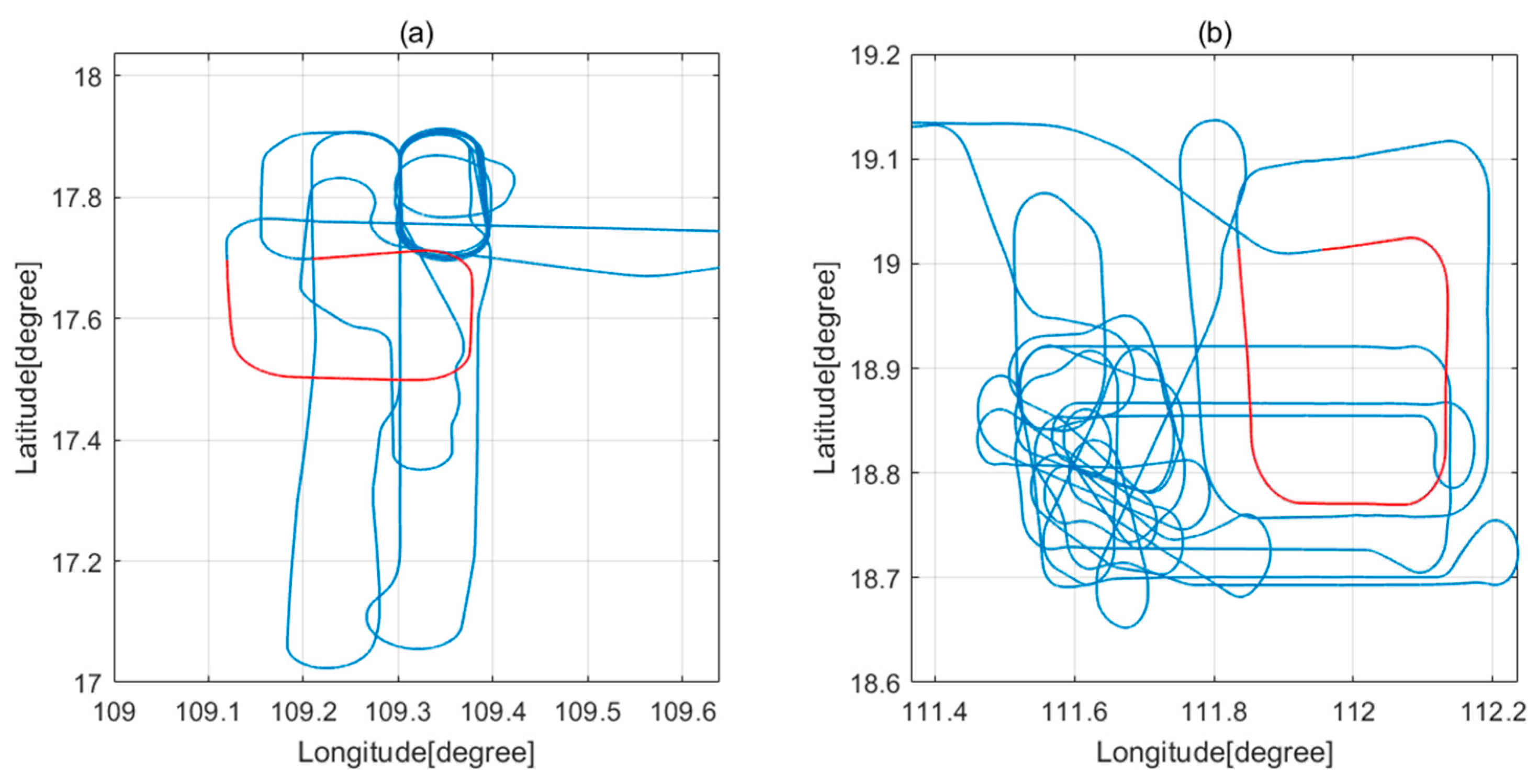
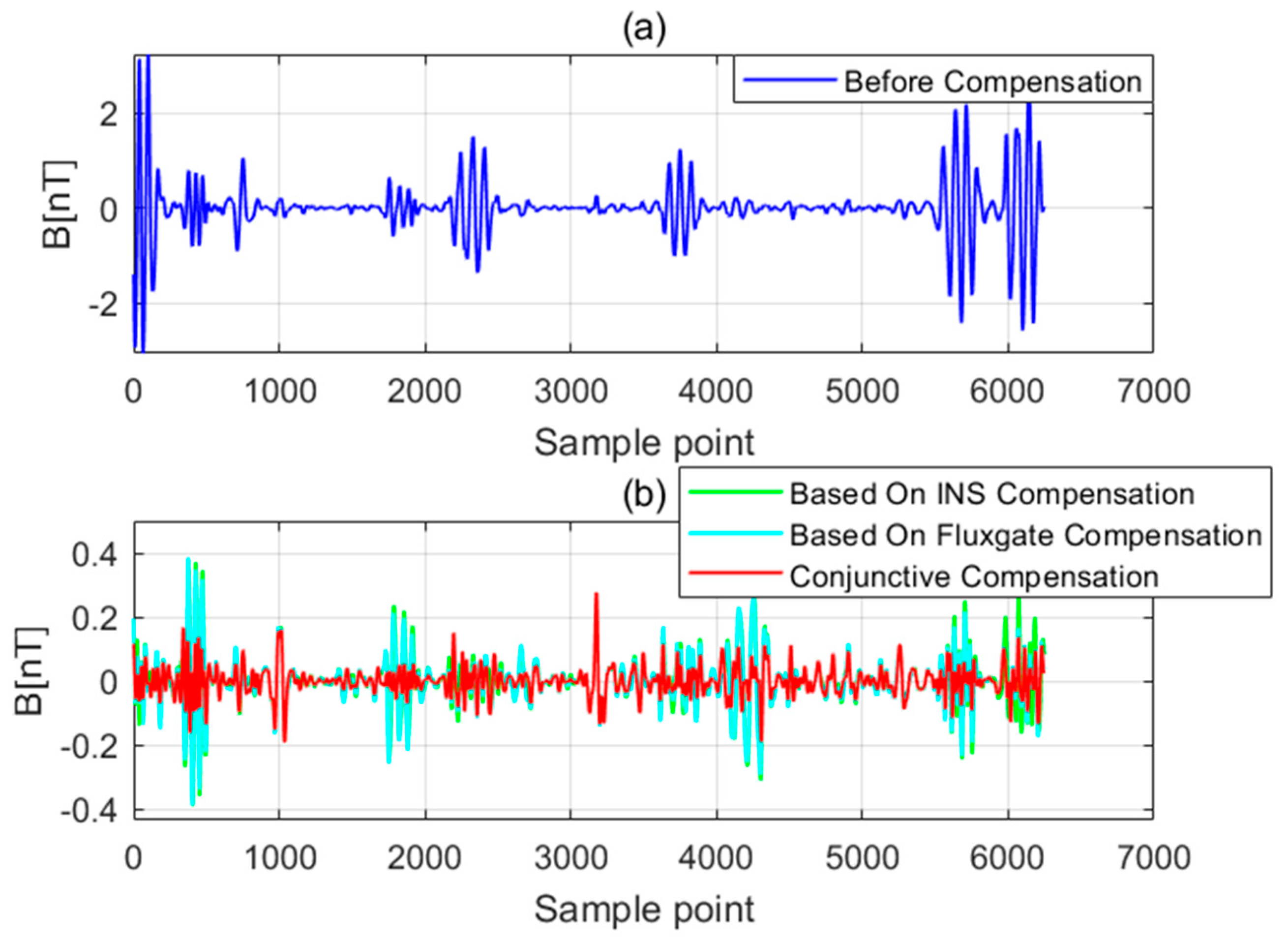
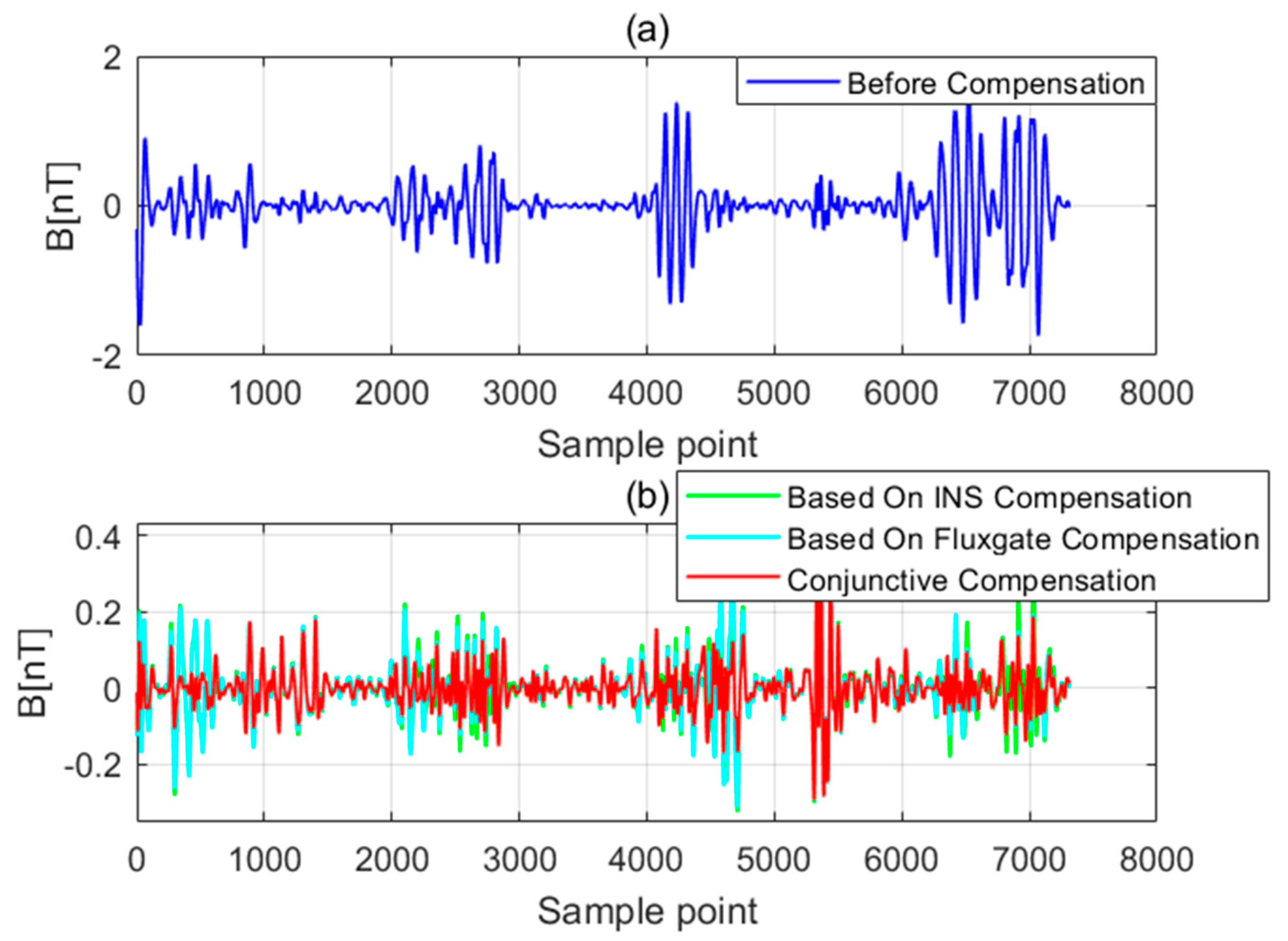
4.1. Experimental Result
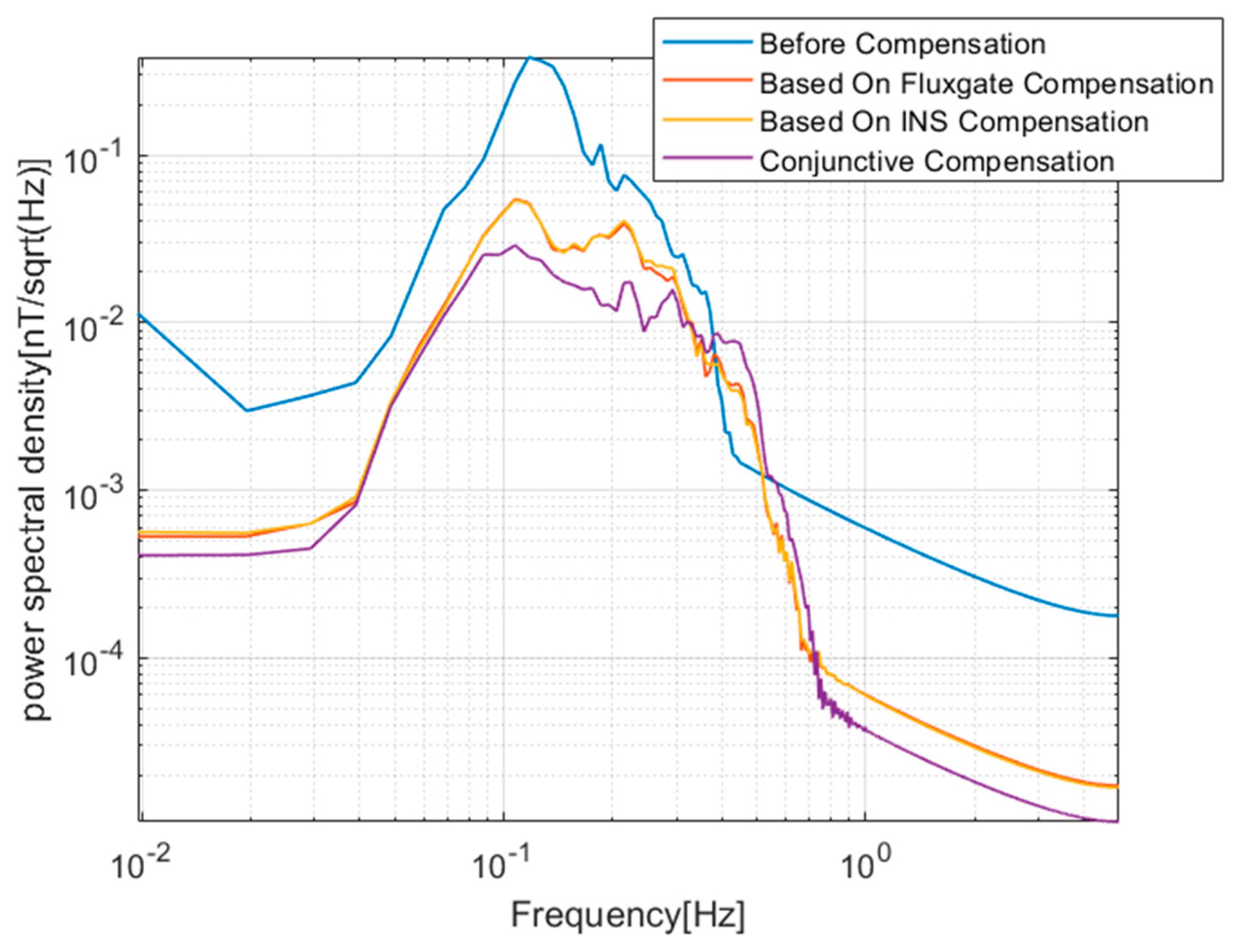
4.2. Result Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Doll, W.E.; Gamey, T.J.; Bell, D.T.; Beard, L.P.; Sheehan, J.R.; Norton, J.; Holladay, J.S.; Lee, J.L.C. Historical Development and Performance of Airborne Magnetic and Electromagnetic Systems for Mapping and Detection of Unexploded Ordnance. J. Environ. Eng. Geophys. 2012, 17, 1. [Google Scholar] [CrossRef]
- Ravimo, I.; Lahti, M. The Interpretation of Aeromagnetic Survey in Eurajoensalmi, Olkiluoto, Finland (2008). In Proceedings of the Near Surface 2009—15th EAGE European Meeting of Environmental and Engineering Geophysics, Dublin, Ireland, 7–9 September 2009. [Google Scholar]
- Erick, D.B.C.; Guimarães, S.N.P. Magnetic Airborne Survey—Geophysical Flight. Geosci. Instrum. Methods Data Syst. 2016, 5, 181–192. [Google Scholar]
- D’Amour, U.J.; Ngaruye, J.C.; Saibi, H. Defining Potential Mineral Exploration Targets from the Interpretation of Aeromagnetic Data in Western Rwanda. Ore Geol. Rev. 2021, 128, 103927. [Google Scholar]
- Hood, P. History of Aeromagnetic Surveying in Canada. Lead. Edge 2007, 26, 1384–1392. [Google Scholar] [CrossRef]
- Groom, R.W.; Jia, R.; Lo, B. Magnetic Compensation of Magnetic Noises Related to Aircraft’s Maneuvers in Airborne Survey. In Symposium on the Application of Geophysics to Engineering and Environmental Problems 2004; Environment and Engineering Geophysical Society: Denver, CO, USA, 2004. [Google Scholar]
- Tolles, W.E. Eddy-Current Compensation. U.S. Patent US55041544A, 13 August 1957. [Google Scholar]
- Tolles, W.E. Magnetic Field Compensation System. U.S. Patent US2706801A, 19 April 1955. [Google Scholar]
- Tolles, W.E. Compensation of Aircraft Magnetic Fields. U.S. Patent 2692970A, 26 October 1954. [Google Scholar]
- Auster, H.U.; Fornacon, K.H.; Georgescu, E.; Glassmeier, K.H.; Motschmann, U. Calibration of Flux-Gate Magnetometers Using Relative Motion. Meas. Sci. Technol. 2002, 13, 1124–1131. [Google Scholar] [CrossRef]
- Pylvänäinen, T. Automatic and Adaptive Calibration of 3D Field Sensor. Appl. Math. Model. 2008, 32, 575–587. [Google Scholar] [CrossRef]
- Kubík, J.; Velák, J.; O’Donnell, T.; Mccloskey, P. Triaxial Fluxgate Sensor with Electroplated Core. Sens. Actuators A Phys. 2009, 152, 139–145. [Google Scholar] [CrossRef]
- Tipek, A.; O’Donnell, T.; Ripka, P.; Kubik, J. Excitation and Temperature Stability of PCB Fluxgate Sensor. IEEE Sens. J. 2005, 5, 1264–1269. [Google Scholar] [CrossRef]
- Velák, J. Calibration of Triaxial Fluxgate Gradiometer. J. Appl. Phys. 2006, 99, 08D913.1–08D913.3. [Google Scholar] [CrossRef]
- Liu, J.; Li, X.; Zhang, Y.; Du, A.; Yang, Y. A Gyro-Aided Strapdown Triaxial Magnetometer Calibration Method Robust to Gyro Bias. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Shafiee Chafi, M.R.; Gholizadeh Narm, H.; Kalat, A.A. Calibration of Fluxgate Sensor Using Least Square Method and Particle Swarm Optimization Algorithm. J. Magn. Magn. Mater. 2023, 570, 170364. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Zhang, Q.; Liu, Z.; Pan, M.; Chen, D.; Xu, Y. Dynamic Compensation of a Fluxgate Magnetometer Based on a Hybrid Optimizing Algorithm. Appl. Sci. 2023, 13, 2830. [Google Scholar] [CrossRef]
- Allred, J.C.; Lyman, R.N.; Kornack, T.W.; Romalis, M. V High-Sensitivity Atomic Magnetometer Unaffected by Spin-Exchange Relaxation. Phys. Rev. Lett. 2002, 89, 130801. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Liu, X.; Qu, X.; Zhu, W.; Huang, L.; Fang, G. Analysis of Aeromagnetic Swing Noise and Corresponding Compensation Method. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–10. [Google Scholar] [CrossRef]
- Leach, B.W. Aeromagnetic Compensation as a Linear Regression Problem. In Information Linkage between Applied Mathematics & Industry; Academic Press: Cambridge, MA, USA, 1980; pp. 139–161. [Google Scholar]
- Hardwick, C.D. Important Design Considerations for Inboard Airborne Magnetic Gradiometers. Explor. Geophysics 1984, 49, 2004–2018. [Google Scholar] [CrossRef]
- Matteo, N.A.; Morton, Y.T. Ionosphere Geomagnetic Field: Comparison of IGRF Model Prediction and Satellite Measurements 1991–2010. Radio Sci. 2016, 46, 1–10. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, Q.; Zheng, Y.; Qu, X.; Wu, F.; Fang, G. An Improved Aeromagnetic Compensation Method Robust to Geomagnetic Gradient. Appl. Sci. 2022, 12, 1490. [Google Scholar] [CrossRef]
- Verriest, E.I. On Three-Dimensional Rotations, Coordinate Frames, and Canonical Forms for It All. Proc. IEEE 1988, 76, 1376–1378. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Compensation Coefficients | No White Noise | 1% White Noise | 5% White Noise | 10% White Noise |
|---|---|---|---|---|
| c1 | 2.7063 | 2.7693 | 2.6785 | 2.6026 |
| c2 | 1.6073 | 2.0583 | 1.8476 | 1.6074 |
| c3 | −0.2453 | −0.2356 | −0.3369 | −0.4062 |
| c4 | 2.1681 × 10−5 | −5.4560 × 10−5 | −3.6020 × 10−5 | −1.9696 × 10−5 |
| c5 | −4.6649 × 10−6 | −4.5530 × 10−6 | −4.7164 × 10−6 | −9.0702 × 10−6 |
| c6 | −1.0169 × 10−5 | −1.0227 × 10−5 | −7.7326 × 10−6 | −7.7468 × 10−6 |
| c7 | 1.6431 × 10−5 | −4.5945 × 10−5 | −3.3852 × 10−5 | −1.7170 × 10−5 |
| c8 | −4.7042 × 10−6 | −3.6484 × 10−6 | −6.4742 × 10−6 | 1.0502 × 10−5 |
| c9 | 1.469 × 10−4 | 6.4670 × 10−5 | 2.5494 × 10−5 | 1.1084 × 10−5 |
| c10 | −9.5252 × 10−4 | −8.3109 × 10−4 | −0.0011 | −0.0013 |
| c11 | −2.5920 × 10−6 | −2.4164 × 10−6 | −9.0160 × 10−7 | −1.1915 × 10−6 |
| c12 | 1.9710 × 10−6 | 2.6852 × 10−6 | 3.6735 × 10−6 | 9.0144 × 10−6 |
| c13 | −2.5627 × 10−6 | −2.8103 × 10−6 | −1.8221 × 10−6 | −1.4755 × 10−6 |
| c14 | −9.5580 × 10−4 | −8.3262 × 10−4 | −0.0011 | −0.0013 |
| c15 | 2.3457 × 10−5 | 2.3677 × 10−5 | 1.9844 × 10−5 | 7.3923 × 10−6 |
| c16 | 1.9224 × 10−6 | 1.8049 × 10−6 | 2.6602 × 10−6 | 3.2138 × 10−6 |
| c17 | −2.3222 × 10−6 | −3.9508 × 10−6 | −1.7717 × 10−5 | −2.3474 × 10−5 |
| c18 | −0.0010 | −8.8769 × 10−4 | −0.0011 | −0.0014 |
| Compensation Coefficients | Before Compensation (rms, pT) | After Compensation (rms, pT) | IR |
|---|---|---|---|
| No white noise | 150.4878 | 11.0523 | 13.6160 |
| 1% white noise | 150.4878 | 12.9478 | 11.6227 |
| 5% white noise | 150.4878 | 24.1168 | 6.2399 |
| 10% white noise | 150.4878 | 35.4036 | 4.2506 |
| Compensation Coefficients | Only Based on Fluxgate Magnetometer | Only Based on INS/GPS |
|---|---|---|
| c1 | 18.2005 | 12.3156 |
| c2 | −4.5502 | 17.8194 |
| c3 | 11.9703 | −3.5954 |
| c4 | −6.7226 × 10−4 | −2.5400 × 10−4 |
| c5 | 1.9335 × 10−5 | −1.7171 × 10−5 |
| c6 | −3.1629 × 10−5 | −9.1665 × 10−5 |
| c7 | −2.8612 × 10−4 | −5.6217 × 10−4 |
| c8 | −9.4523 × 10−5 | 1.8367 × 10−5 |
| c9 | −4.1923 × 10−4 | −2.2068 × 10−4 |
| c10 | −0.0118 | −0.0150 |
| c11 | −1.2062 × 10−6 | 1.5055 × 10−5 |
| c12 | −1.2087 × 10−5 | 7.8399 × 10−5 |
| c13 | −5.0812 × 10−5 | −3.3818 × 10−5 |
| c14 | −0.0116 | −0.0139 |
| c15 | −2.6569 × 10−4 | 6.1942 × 10−6 |
| c16 | 3.3862 × 10−6 | −1.5106 × 10−4 |
| c17 | 8.6262 × 10−5 | 7.1800 × 10−5 |
| c18 | −0.0130 | −0.0136 |
| Conjunctive Compensation Model Coefficients | Value | Conjunctive Compensation Model Coefficients | Value |
|---|---|---|---|
| c1 | 19.3471 | c19 | −1.8367 |
| c2 | −1.2289 | c20 | 2.2227 |
| c3 | 13.3915 | c21 | 2.2764 |
| c4 | −5.5459 × 10−4 | c22 | 1.5645 × 10−4 |
| c5 | 1.9485 × 10−5 | c23 | −1.1847 × 10−4 |
| c6 | −6.2487 × 10−5 | c24 | 6.5468 × 10−5 |
| c7 | −2.0969 × 10−4 | c25 | 1.5699 × 10−4 |
| c8 | 6.2506 × 10−7 | c26 | −4.5371 × 10−6 |
| c9 | −2.1416 × 10−4 | c27 | 1.4092 × 10−4 |
| c10 | 0.0240 | c28 | −0.0092 |
| c11 | −2.9659 × 10−5 | c29 | 1.7255 × 10−4 |
| c12 | 2.4828 × 10−4 | c30 | 2.4131 × 10−5 |
| c13 | −5.1210 × 10−5 | c31 | −3.1431 × 10−5 |
| c14 | 0.0240 | c32 | −0.0096 |
| c15 | −1.5170 × 10−4 | c33 | −3.2166 × 10−6 |
| c16 | 1.2771 × 10−4 | c34 | 2.8985 × 10−5 |
| c17 | 9.4952 × 10−5 | c35 | −2.4998 × 10−5 |
| c18 | 0.0225 | c36 | −0.0095 |
| Calibration Flight Data | Only Based on Fluxgate | Only Based on INS/GPS | Conjunctive Compensation Model |
|---|---|---|---|
| STD before compensation (pT) | 576.1521 | 576.1521 | 576.1521 |
| STD after compensation (pT) | 76.9257 | 80.0745 | 46.2024 |
| IR | 7.4897 | 7.1952 | 12.4702 |
| Verification Flight Data | Only Based on Fluxgate | Only Based on INS/GPS | Conjunctive Compensation Model |
|---|---|---|---|
| STD before compensation (pT) | 386.3243 | 386.3243 | 386.3243 |
| STD after compensation (pT) | 74.6030 | 77.7266 | 56.0597 |
| IR | 5.1784 | 4.9703 | 6.8913 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, B.; Zhang, K.; Yan, B.; Zhu, W. The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer. Appl. Sci. 2023, 13, 5138. https://doi.org/10.3390/app13085138
Chen B, Zhang K, Yan B, Zhu W. The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer. Applied Sciences. 2023; 13(8):5138. https://doi.org/10.3390/app13085138
Chicago/Turabian StyleChen, Bingyang, Ke Zhang, Bin Yan, and Wanhua Zhu. 2023. "The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer" Applied Sciences 13, no. 8: 5138. https://doi.org/10.3390/app13085138
APA StyleChen, B., Zhang, K., Yan, B., & Zhu, W. (2023). The Conjunctive Compensation Method Based on Inertial Navigation System and Fluxgate Magnetometer. Applied Sciences, 13(8), 5138. https://doi.org/10.3390/app13085138