
Application of Neural Network Algorithms for Central Wavelength Determination of Fiber Optic Sensors

 , ,
, ,  ,
,  and
and
Abstract
:Featured Application
Abstract
1. Introduction
2. Problem Statement
3. Parameter Selection
4. Training
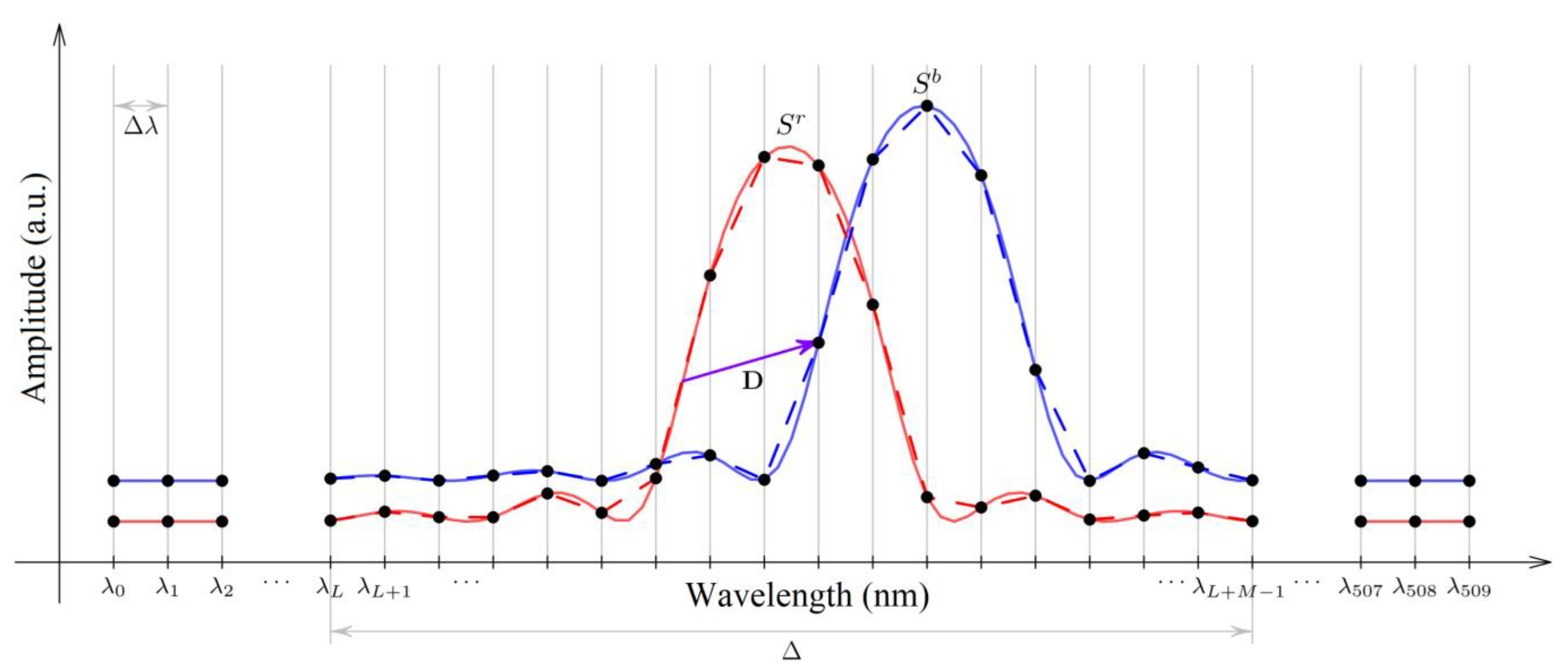
- Modeling of the FBG reflection spectrum at a wavelength arbitrarily selected from the range [λB − 0.5 nm; λB + 0.5 nm], where λB is the central value of the wavelength within the controlled wavelength interval Δ. The resulting spectrum {Ri} is discretized at Δλ intervals. The amplitude values {Ri} and the central wavelength λB are normalized by (1).
- Setting the initial values of synaptic weights and shifts:
- Direct signal propagation through a neural network, consisting of these steps:
- Calculating the weighted sum of the sensory layer neurons’ values;
- Calculating the associative layer values (using a nonlinear activation function);
- Calculating the weighted sum of the associative layer’s neurons’ values;
- Calculating the value of the neurons in the response layer (using a linear activation function) for each neuron in the associative and reacting layers.
- Direct propagation yielding a normalized FBG central wavelength value representing neural network responses.
- Reverse propagation of the error signal, consisting of these steps:
- Calculating the error of the FBG central wavelength determination (the norm between the target value vector and the neural network response vector) according to the selected metric;
- Calculating the error for each neural network parameter in sequence using the Adam optimization algorithm;
- Correcting synaptic weights and model shifts.
- Verifying that the training algorithm criterion meets the requirement:where and are the target and calculated values of the FBG central wavelength at the i(j)th iteration, I is the number of iterations for which averaging occurs, K is the number of training iterations, and ε1 is an arbitrary predetermined small value.
5. Verification
- 1.
- Modeling of the FBG reflection spectrum at a wavelength arbitrarily selected from the range [λB − 0.5 nm; λB + 0.5 nm], where λB is the central value of the wavelength within the controlled wavelength interval Δ. The resulting spectrum {Ri} is discretized at Δλ intervals. The amplitude values {Ri} and the central wavelength λB are normalized using (1).
- 2.
- Calculation of the neural network response using (6).
- 3.
- Calculation of the error in FBG central wavelength determination using (3).
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Grattan, L.S.; Meggitt, B.T. (Eds.) Optical Fiber Sensor Technology: Advanced Applications—Bragg Gratings and Distributed Sensors; Springer: Boston, MA, USA, 2000; ISBN 978-0-7923-7946-1. [Google Scholar]
- Kronenberg, P.; Rastogi, P.K.; Giaccari, P.; Limberger, H.G. Relative humidity sensor with optical fiber Bragg gratings. Opt. Lett. 2002, 27, 1385–1387. [Google Scholar] [CrossRef]
- Tai, H. Theory of fiber optical Bragg grating: Revisited. In Proceedings of the Optical Modeling and Performance Predictions, San Diego, CA, USA, 6–7 August 2003; SPIE: Bellingham, DC, USA, 2004; Volume 5178, pp. 131–138. [Google Scholar]
- Njegovec, M.; Donlagic, D. A Fiber-Optic Gas Sensor and Method for the Measurement of Refractive Index Dispersion in NIR. Sensors 2020, 20, 3717. [Google Scholar] [CrossRef] [PubMed]
- Tseng, S.-M.; Chen, C.-L. Optical fiber Fabry-Perot sensors. Appl. Opt. 1988, 27, 547–551. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.; Dai, Y.; Zhang, D.; Wen, X.; Yang, M. Cascaded-Cavity Fabry-Perot Interferometric Gas Pressure Sensor based on Vernier Effect. Sensors 2018, 18, 3677. [Google Scholar] [CrossRef]
- Campanella, C.E.; Malara, P.; Campanella, C.M.; Giove, F.; Dunai, M.; Passaro, V.M.N.; Gagliardi, G. Mode-splitting cloning in birefringent fiber Bragg grating ring resonators. Opt. Lett. 2016, 41, 2672–2675. [Google Scholar] [CrossRef] [PubMed]
- Campanella, C.E.; Leonardis, F.D.; Mastronardi, L.; Malara, P.; Gagliardi, G.; Passaro, V.M.N. Investigation of refractive index sensing based on Fano resonance in fiber Bragg grating ring resonators. Opt. Express 2015, 23, 14301–14313. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Zhang, H.; Sun, L.; Li, J.; Yu, C. Temperature tunable Fano resonance based on ring resonator side coupled with a MIM waveguide. Opt. Laser Technol. 2019, 116, 293–299. [Google Scholar] [CrossRef]
- Mandal, S.; Dasgupta, K.; Basak, T.K.; Ghosh, S.K. A generalized approach for modeling and analysis of ring-resonator performance as optical filter. Opt. Commun. 2006, 1, 97–104. [Google Scholar] [CrossRef]
- Limonov, M.F.; Rybin, M.V.; Poddubny, A.N.; Kivshar, Y.S. Fano resonances in photonics. Nat. Photonics 2017, 11, 543–554. [Google Scholar] [CrossRef]
- Ben Hassen, R.; Caucheteur, C.; Delchambre, A. FBGs temperature sensor for electrosurgical knife subject to high voltage and high-frequency current. In Optical Sensing and Detection VI, Proceedings of the SPIE PHOTONICS EUROPE, Online, 6–10 April 2020; SPIE: Bellingham, WA, USA, 2020; Volume 11354. [Google Scholar]
- Pinet, É.; Ellyson, S.; Borne, F. Temperature Fiber-Optic Point Sensors: Commercial Technologies and Industrial Applications. Inf. MIDEM 2010, 40, 275–286. [Google Scholar]
- Eom, J.; Park, C.-J.; Lee, B.H.; Lee, J.-H.; Kwon, I.-B.; Chung, E. Fiber optic Fabry–Perot pressure sensor based on lensed fiber and polymeric diaphragm. Sens. Actuators A Phys. 2015, 225, 25–32. [Google Scholar] [CrossRef]
- Liang, H.; Jia, P.; Liu, J.; Fang, G.; Li, Z.; Hong, Y.; Liang, T.; Xiong, J. Diaphragm-Free Fiber-Optic Fabry-Perot Interferometric Gas Pressure Sensor for High Temperature Application. Sensors 2018, 18, 1011. [Google Scholar] [CrossRef] [PubMed]
- Ledyankin, M.A.; Mikhailov, S.A.; Nedel’ko, D.V.; Agliullin, T.A. Implementation of the Radiophotonic Method for Measuring Blade Deformations of a Helicopter Main Rotor Model. Russ. Aeronaut. 2020, 63, 767–770. [Google Scholar] [CrossRef]
- Lawson, N.J.; Correia, R.; James, S.W.; Partridge, M.; Staines, S.E.; Gautrey, J.E.; Garry, K.P.; Holt, J.C.; Tatam, R.P. Development and application of optical fibre strain and pressure sensors for in-flight measurements. Meas. Sci. Technol. 2016, 27, 104001. [Google Scholar] [CrossRef]
- Kuznetsov, A.A.; Lipatnikov, K.A.; Nureev, I.I.; Morozov, O.G.; Sakhabutdinov, A.J. Fiber-optic sensors for complex monitoring of traction motors. In Proceedings of the Journal of Physics: Conference Series; Institute of Physics Publishing: Bristol, UK, 2019; Volume 1327, p. 012034. [Google Scholar]
- Morozov, O.G.; Nureev, I.I.; Kuznetsov, A.A.; Artemiev, V.I. Smart Photonic Carbon Brush: FBG Length as Sensing Parameter. J. Phys. Conf. Ser. 2018, 999, 012017. [Google Scholar] [CrossRef]
- Wang, C.; Yao, J. Fiber Bragg gratings for microwave photonics subsystems. Opt. Express 2013, 21, 22868–22884. [Google Scholar] [CrossRef]
- Qin, C.; Zhao, J.; Jiang, B.; Yang, D. Sub-pixel algorithms on linear-array detector grating spectrometer. In Advanced Sensor Systems and Applications V, Proceedings of the PHOTONICS ASIA, Beijing, China, 5-7 November 2012; Culshaw, B., Liao, Y., Wang, A., Bao, X., Fan, X., Eds.; SPIE: Bellingham, WA, USA, 2012; p. 85610N. [Google Scholar]
- Bodendorfer, T.; Muller, M.S.; Hirth, F.; Koch, A.W. Comparison of different peak detection algorithms with regards to spectrometic fiber Bragg grating interrogation systems. In Proceedings of the 2009 International Symposium on Optomechatronic Technologies, Istanbul, Turkey, 21–23 September 2009; pp. 122–126. [Google Scholar]
- Sakhabutdinov, A.Z.; Nureev, I.I.; Morozov, O.G. Clarification of the central wavelength FBG position in a poor signal-to-noise ratio conditions. Phys. Wave Process. Radio Syst. 2015, 18, 98–102. (In Russian) [Google Scholar]
- Anfinogentov, V.; Karimov, K.; Kuznetsov, A.; Morozov, O.G.; Nureev, I.; Sakhabutdinov, A.; Lipatnikov, K.; Hussein, S.M.R.H.; Ali, M.H. Algorithm of FBG Spectrum Distortion Correction for Optical Spectra Analyzers with CCD Elements. Sensors 2021, 21, 2817. [Google Scholar] [CrossRef]
- Deepa, S.; Das, B. Interrogation techniques for π-phase-shifted fiber Bragg grating sensor: A review. Sens. Actuators A Phys. 2020, 315, 112215. [Google Scholar] [CrossRef]
- Agrawal, G.P.; Radic, S. Phase-shifted fiber Bragg gratings and their application for wavelength demultiplexing. IEEE Photonics Technol. Lett. 1994, 6, 995–997. [Google Scholar] [CrossRef]
- Dai, B.; Gao, Z.; Wang, X.; Kataoka, N.; Wada, N. Performance comparison of 0/π- and ±π/2-phase-shifted superstructured Fiber Bragg grating en/decoder. Opt. Express 2011, 19, 12248–12260. [Google Scholar] [CrossRef] [PubMed]
- Morozov, O.G.; Nureev, I.I.; Sahabutdinov, A.Z.; Gubaidullin, R.R.; Morozov, G.A. Problem of fano resonance characterization in ring π-shift fiber bragg grating biosensors. In Proceedings of the 2019 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Yaroslavl, Russia, 1–3 July 2019; pp. 1–6. [Google Scholar]
- Xu, O.; Zhang, J.; Yao, J. High speed and high resolution interrogation of a fiber Bragg grating sensor based on microwave photonic filtering and chirped microwave pulse compression. Opt. Lett. 2016, 41, 4859–4862. [Google Scholar] [CrossRef] [PubMed]
- Ricchiuti, A.L.; Barrera, D.; Sales, S.; Thévenaz, L.; Capmany, J. Long Weak FBG Sensor Interrogation Using Microwave Photonics Filtering Technique. IEEE Photonics Technol. Lett. 2014, 26, 2039–2042. [Google Scholar] [CrossRef]
- Negri, L.; Nied, A.; Kalinowski, H.; Paterno, A. Benchmark for Peak Detection Algorithms in Fiber Bragg Grating Interrogation and a New Neural Network for its Performance Improvement. Sensors 2011, 11, 3466–3482. [Google Scholar] [CrossRef] [PubMed]
- An, Y.; Wang, X.; Qu, Z.; Liao, T.; Nan, Z. Fiber Bragg grating temperature calibration based on BP neural network. Optik 2018, 172, 753–759. [Google Scholar] [CrossRef]
- Zimmermann, A.C.; Veiga, C.L.N.; Encinas, L.S. Unambiguous Signal Processing and Measuring Range Extension for Fiber Bragg Gratings Sensors Using Artificial Neural Networks—A Temperature Case. IEEE Sens. J. 2008, 8, 1229–1235. [Google Scholar] [CrossRef]
- Paterno, A.S.; Silva, J.C.C.; Milczewski, M.S.; Arruda, L.V.R.; Kalinowski, H.J. Radial-basis function network for the approximation of FBG sensor spectra with distorted peaks. Meas. Sci. Technol. 2006, 17, 1039–1045. [Google Scholar] [CrossRef]
- Orr, M.J.L. Regularization in the Selection of Radial Basis Function Centers. Neural Comput. 1995, 7, 606–623. [Google Scholar] [CrossRef]
- Kahandawa, G.C.; Epaarachchi, J.A.; Wang, H.; Followell, D.; Birt, P. Use of fixed wavelength Fibre-Bragg Grating (FBG) filters to capture time domain data from the distorted spectrum of an embedded FBG sensor to estimate strain with an Artificial Neural Network. Sens. Actuators A Phys. 2013, 194, 1–7. [Google Scholar] [CrossRef]
- Jiang, H.; Zeng, Q.; Chen, J.; Qiu, X.; Liu, X.; Chen, Z.; Miao, X. Wavelength detection of model-sharing fiber Bragg grating sensor networks using long short-term memory neural network. Opt. Express 2019, 27, 20583. [Google Scholar] [CrossRef]
- Kokhanovskiy, A.; Shabalov, N.; Dostovalov, A.; Wolf, A. Highly Dense FBG Temperature Sensor Assisted with Deep Learning Algorithms. Sensors 2021, 21, 6188. [Google Scholar] [CrossRef] [PubMed]
- Agliullin, T.; Anfinogentov, V.; Morozov, O.; Sakhabutdinov, A.; Valeev, B.; Niyazgulyeva, A.; Garovov, Y. Comparative Analysis of the Methods for Fiber Bragg Structures Spectrum Modeling. Algorithms 2023, 16, 101. [Google Scholar] [CrossRef]
- Erdogan, T. Fiber grating spectra. J. Light. Technol. 1997, 15, 1277–1294. [Google Scholar] [CrossRef]
- White, B.W.; Rosenblatt, F. Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms. Am. J. Psychol. 1963, 76, 705. [Google Scholar] [CrossRef]
- Amari, S. Backpropagation and stochastic gradient descent method. Neurocomputing 1993, 5, 185–196. [Google Scholar] [CrossRef]
- Nesterov, Y. Introductory Lectures on Convex Optimization; Applied Optimization; Springer: Boston, MA, USA, 2004; Volume 87, ISBN 978-1-4613-4691-3. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Chen, R.; He, J.; Xu, X.; Wu, J.; Wang, Y.; Wang, Y. High-Quality Fiber Bragg Gratings Inscribed by Femtosecond Laser Point-by-Point Technology. Micromachines 2022, 13, 1808. [Google Scholar] [CrossRef]
- Marshall, G.D.; Williams, R.J.; Jovanovic, N.; Steel, M.J.; Withford, M.J. Point-by-point written fiber-Bragg gratings and their application in complex grating designs. Opt. Express 2010, 18, 19844–19859. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Wavelength Estimation Error | Temperature Estimation Error | Data Resolution |
|---|---|---|---|
| [31] | 1.45 pm (RMSE) | 0.145 °C | 1 pm |
| [32] | 2.081 pm (RMSE) | 0.2081 °C | - |
| [33] | 2 pm (2∙σ) | 0.2 °C | - |
| [34] | 2 pm (mean), 25 pm (σ) | 0.2 °C | 4 pm |
| Current work | 0.411 pm (MAE), 0.533 pm (σ) | 0.05 °C | 167 pm |
| Parameters | Values | Normalized Values |
|---|---|---|
| FBG length (L) | 0.5 ÷ 3.5 mm | - |
| Refractive index (n) | 1.4586604 | - |
| Induced refractive index (Δn) | 0.5∙10−4 ÷ 1.5∙10−4 | - |
| Controlled wavelength interval (Δ) | 1548.5 ÷ 1551.5 nm | 0 ÷ 1 |
| Central wavelength (λB) | 1549.5 ÷ 1550.5 nm | 0.333 ÷ 0.667 |
| Discretization interval (Δλ) | 0.16667 nm | 1/18 |
| Full width at half height | 0.229 ÷ 1.458 nm | 0.076 ÷ 0.486 |
| Maximum amplitude | 0.61 × 216 a.u. | 1 |
| Amplitude variation range | 3.92∙10−4 × 216 ÷ 0.15 × 216 a.u. | 6.42∙10−4 ÷ 0.26 |
| Noise | 0 ÷ 2 × 10−3 × 216 a.u. | 0 ÷ 0.002 |
| Pedestal | 0 ÷ 2 × 10−1 × 216 a.u. | 0 ÷ 0.2 |
| Characteristic | Value (Fixed Boundaries) | Value (Variable Boundaries) |
|---|---|---|
| Mathematical expectation | 0.084 pm | 0.041 pm |
| Average absolute error | 0.478 pm | 0.411 pm |
| Median | 0.097 pm | 0.066 pm |
| Standard deviation | 0.627 pm | 0.533 pm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Agliullin, T.; Anfinogentov, V.; Misbakhov, R.; Morozov, O.; Nasybullin, A.; Sakhabutdinov, A.; Valeev, B. Application of Neural Network Algorithms for Central Wavelength Determination of Fiber Optic Sensors. Appl. Sci. 2023, 13, 5338. https://doi.org/10.3390/app13095338
Agliullin T, Anfinogentov V, Misbakhov R, Morozov O, Nasybullin A, Sakhabutdinov A, Valeev B. Application of Neural Network Algorithms for Central Wavelength Determination of Fiber Optic Sensors. Applied Sciences. 2023; 13(9):5338. https://doi.org/10.3390/app13095338
Chicago/Turabian StyleAgliullin, Timur, Vladimir Anfinogentov, Rustam Misbakhov, Oleg Morozov, Aydar Nasybullin, Airat Sakhabutdinov, and Bulat Valeev. 2023. "Application of Neural Network Algorithms for Central Wavelength Determination of Fiber Optic Sensors" Applied Sciences 13, no. 9: 5338. https://doi.org/10.3390/app13095338
APA StyleAgliullin, T., Anfinogentov, V., Misbakhov, R., Morozov, O., Nasybullin, A., Sakhabutdinov, A., & Valeev, B. (2023). Application of Neural Network Algorithms for Central Wavelength Determination of Fiber Optic Sensors. Applied Sciences, 13(9), 5338. https://doi.org/10.3390/app13095338