
PV-Powered Charging Station with Energy Cost Optimization via V2G Services





Abstract
:Featured Application
Abstract
1. Introduction
- Proposing an energy cost optimization problem in a PVCS with V2G service, taking into consideration the uncertainty of the arrival time of EVs in a real-time simulation;
- Actualizing the optimization problem formulated via MILP at every arrival of a new EV; the arrival of EVs is not modeled based on day-ahead prediction; instead it is randomly generated as unpredicted events in MATLAB;
- Assessing the energy consumption of every EV from each power source and the energy participation among the power sources (PV, energy storage, and grid).
2. PV-Powered Charging Station with V2G Service
2.1. PV-Powered Charging Station with V2G Service without Energy Cost Optimization
2.2. PV-Powered Charging Station with V2G Service with Energy Cost Optimization
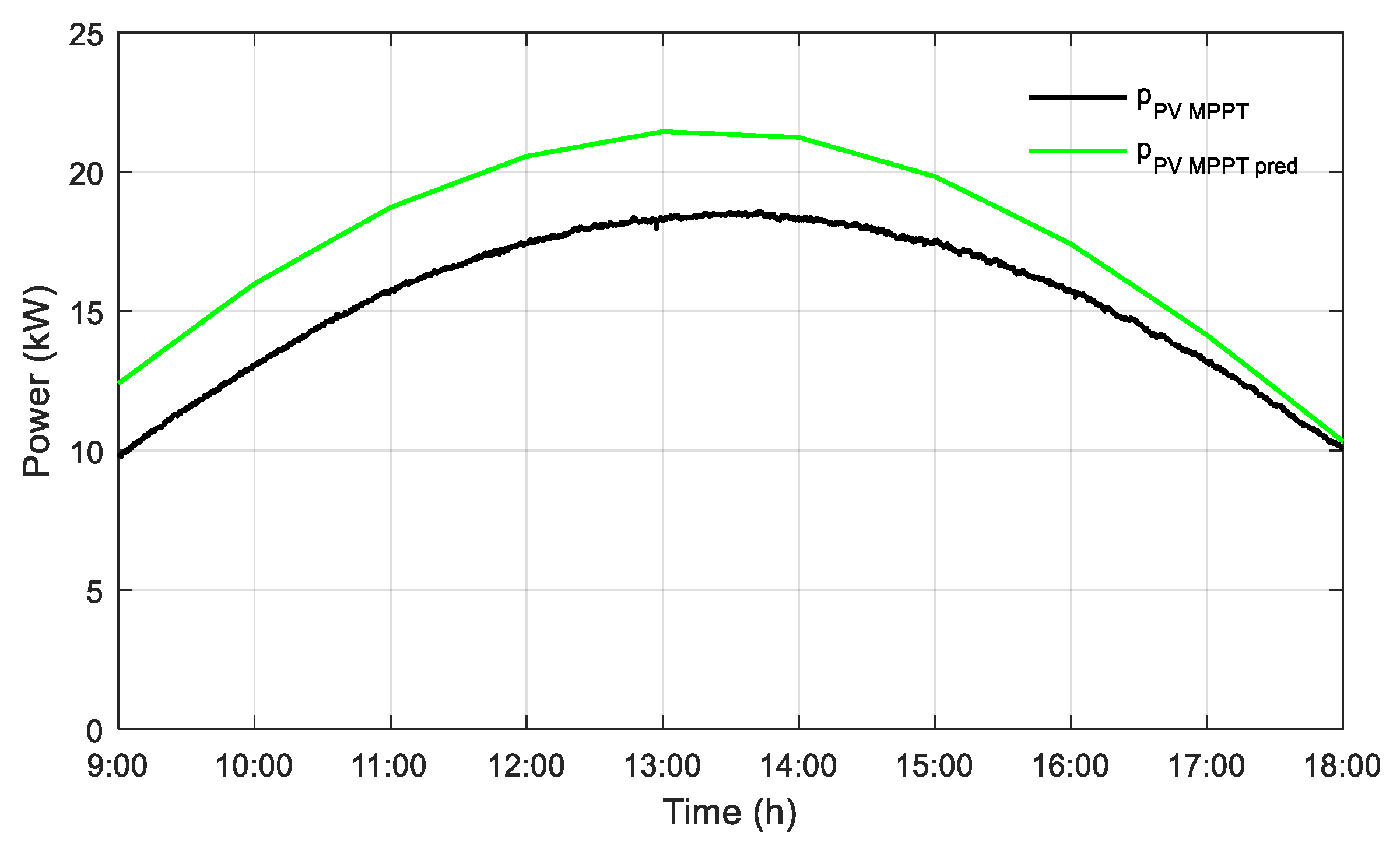
2.2.1. Prediction Layer
2.2.2. Human–Machine Interface
2.2.3. Energy Cost Optimization
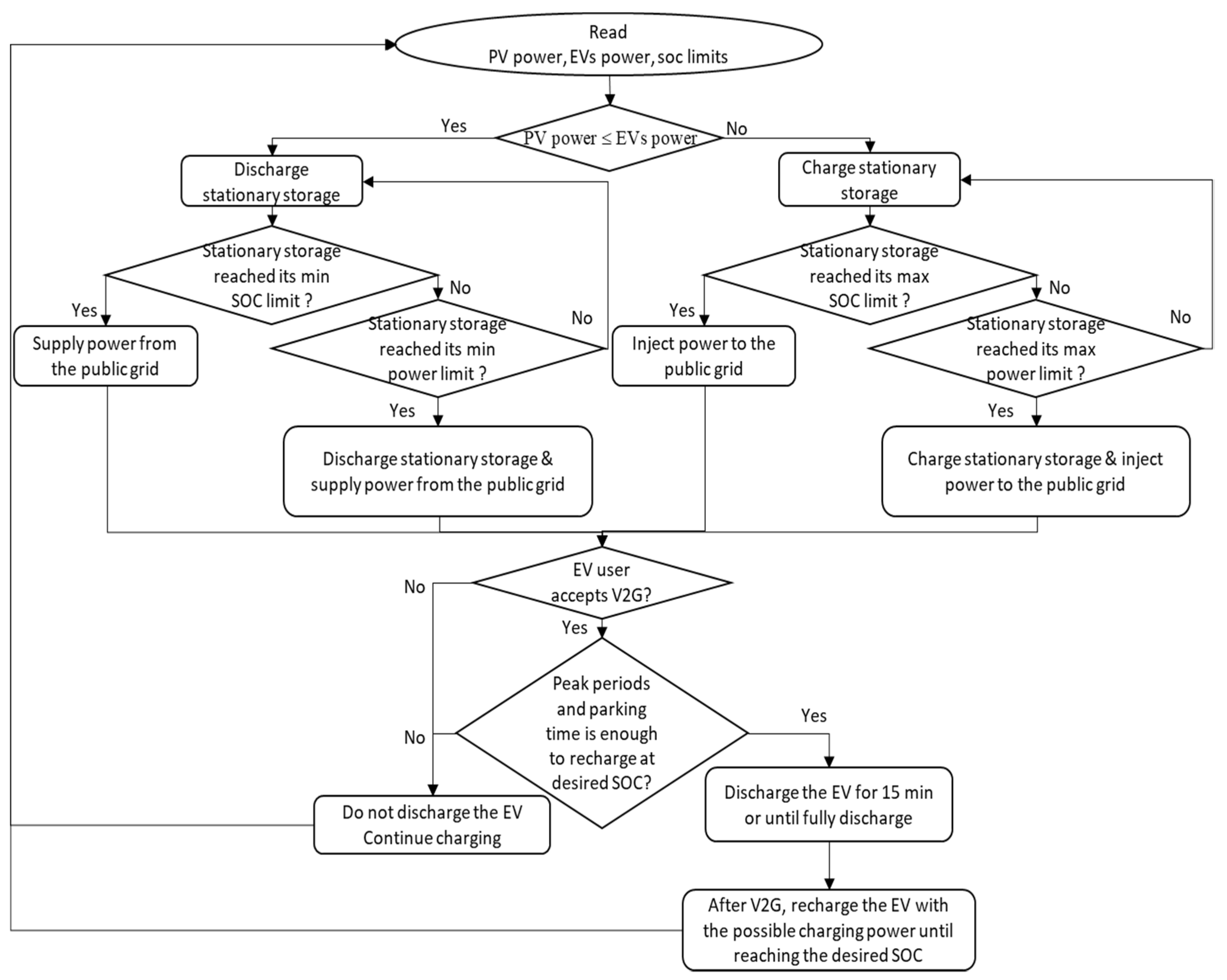
2.2.4. Operation Layer
3. Energy Cost Optimization with V2G Service
3.1. PV Sources
3.2. Stationary Storage
3.3. Grid Connection
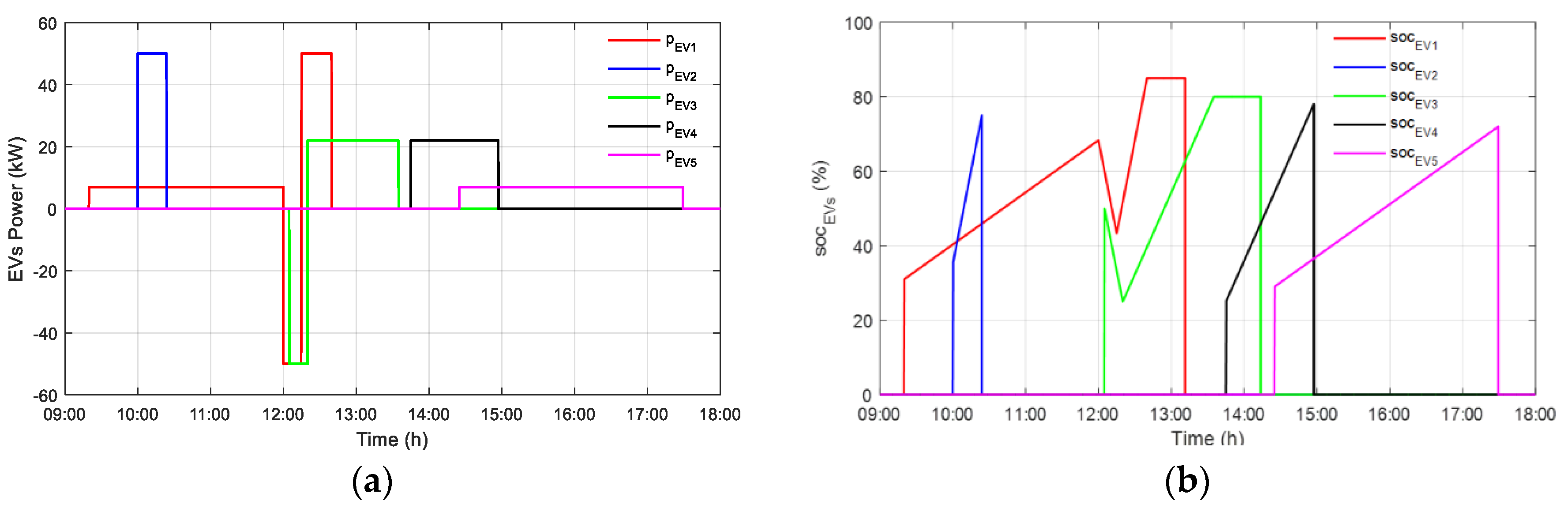
3.4. Electric Vehicles
3.4.1. V2G Mode
3.4.2. EV Charging Mode
3.5. Power Balancing
3.6. Objective Function
4. Simulation Results for PVCS with V2G Service
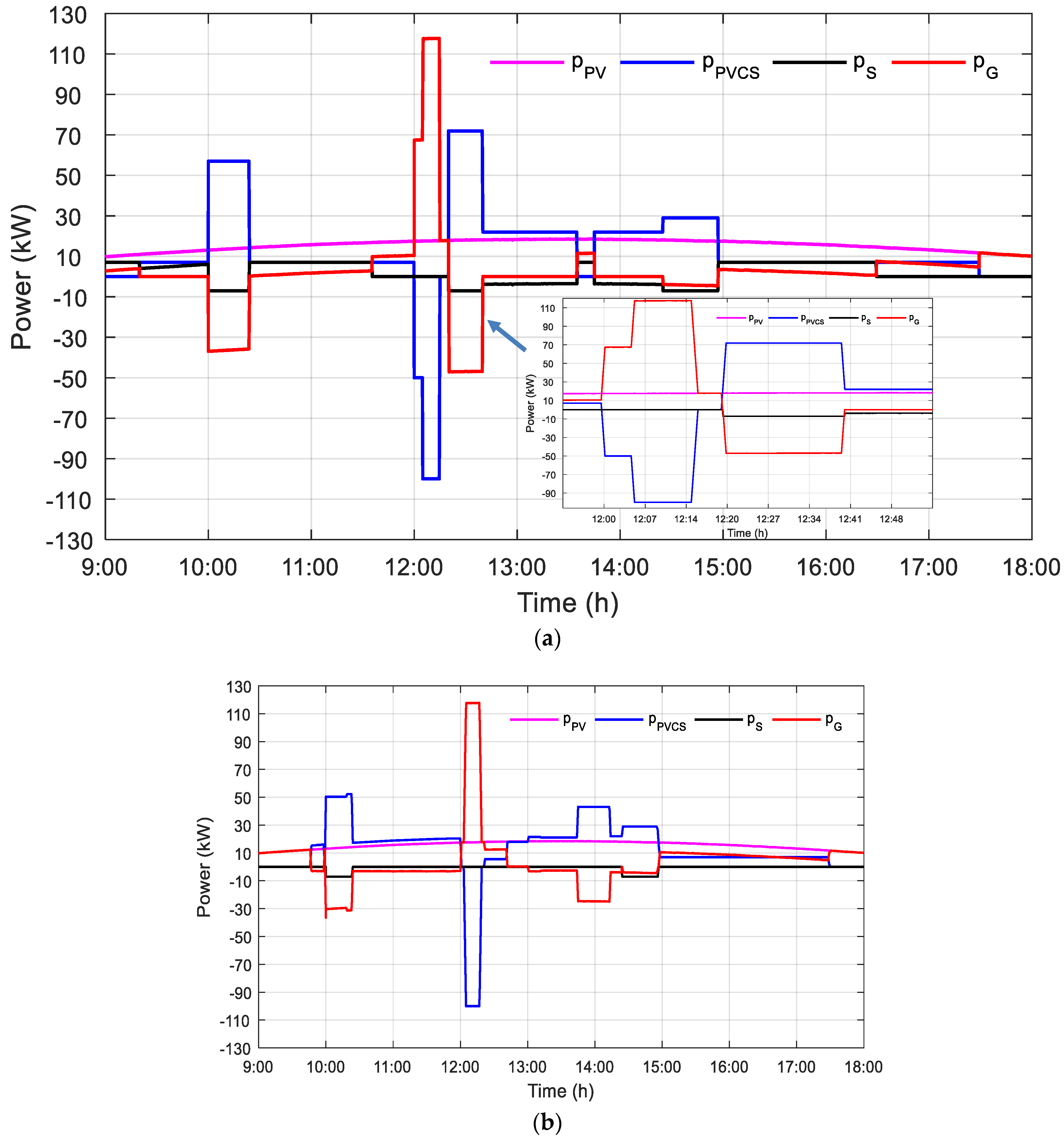
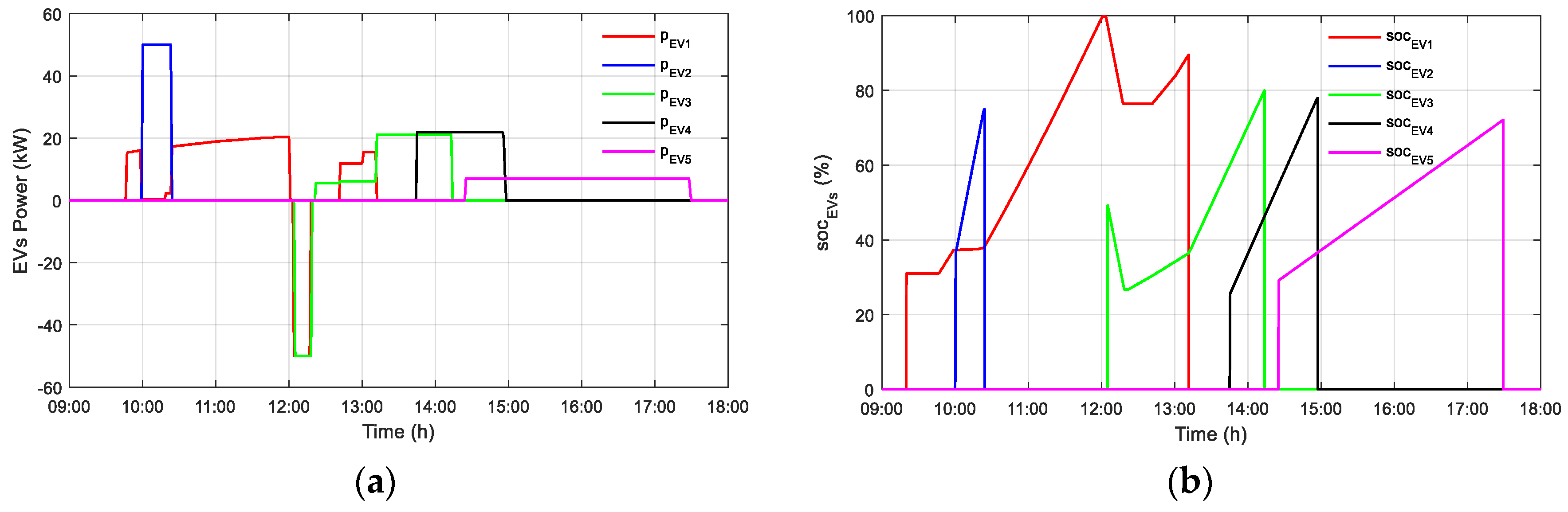
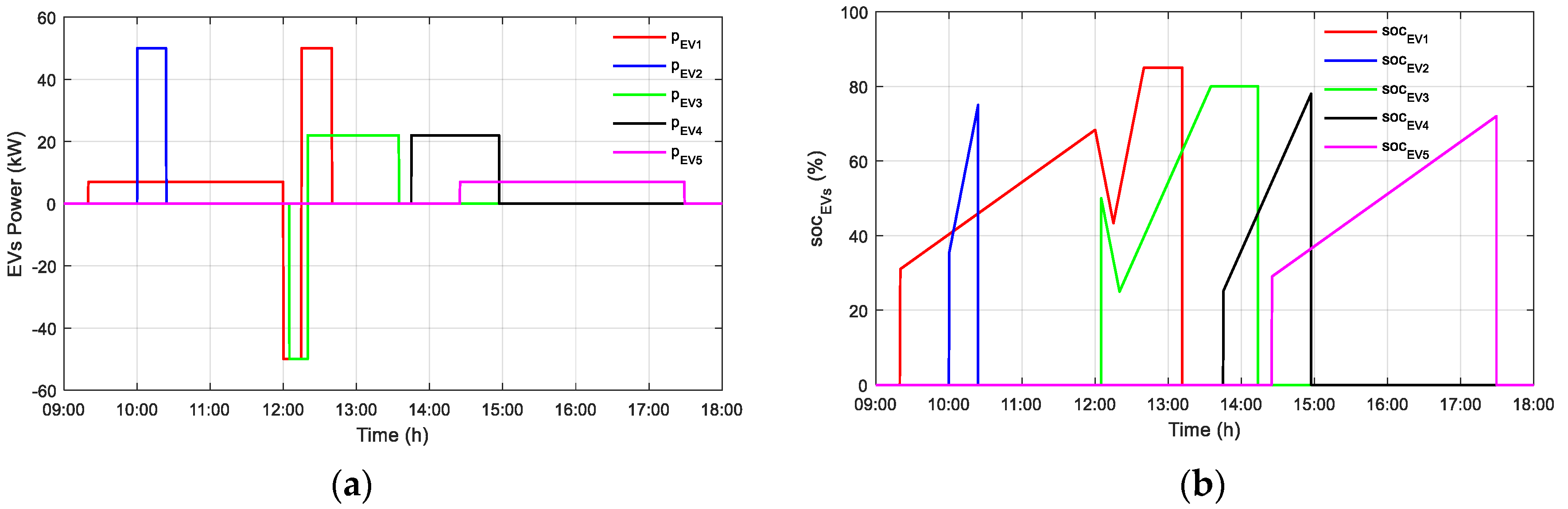
- Scenario a: during peak periods, EVs discharge at a constant power and then recharge with the same constant charging power as set by the user until departure time;
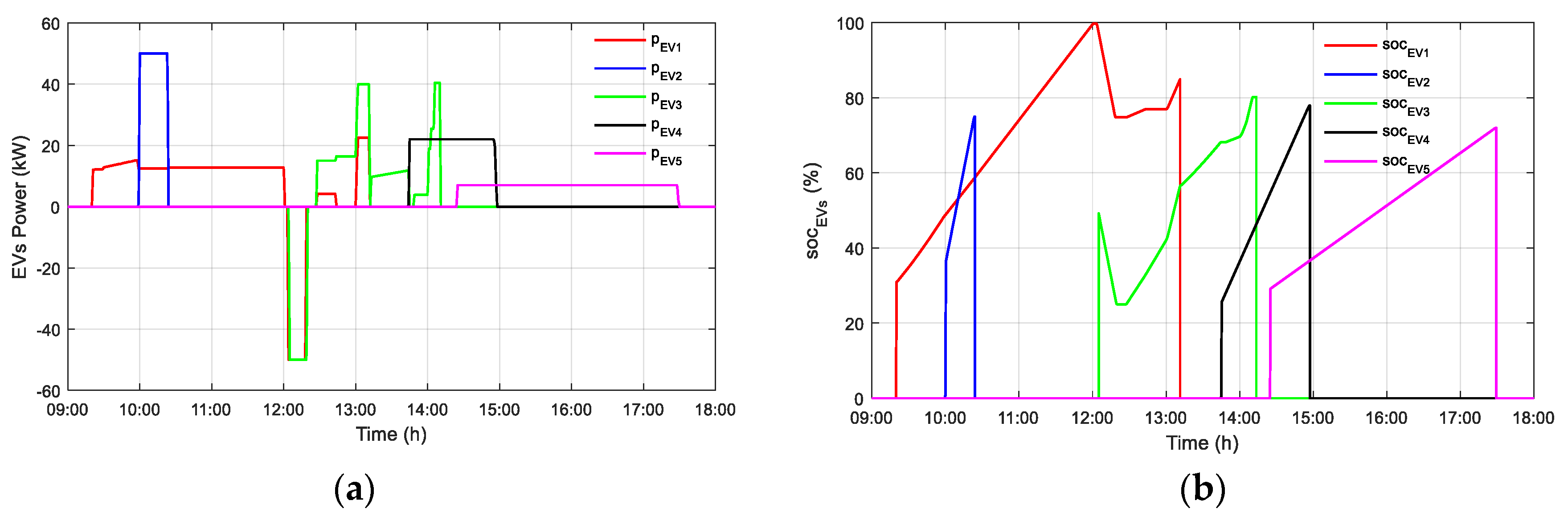
- Scenario b: during peak periods, EVs discharge at a maximum power of 50 kW and then recharge again with a variable charging power, irrespective of the charging mode selected by the user, to achieve the desired SOC at departure after V2G service.
4.1. Case 1: Sunny Day
4.1.1. Scenario a: Constant Power
4.1.2. Scenario b: Variable Power
4.2. Case 2: Cloudy Day
5. Energy Cost Analyses for PV-Powered Charging Station with V2G Service
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Galati, A.; Adamashvili, N.; Crescimanno, M. A Feasibility Analysis on Adopting Electric Vehicles in the Short Food Supply Chain Based on GHG Emissions and Economic Costs Estimations. Sustain. Prod. Consum. 2023, 36, 49–61. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, C.; Liu, H.; Wang, N.; Chen, L.; Wang, C.; Jiang, X.; Ye, C. Optimal Design and Energy Management of Residential Prosumer Community with Photovoltaic Power Generation and Storage for Electric Vehicles. Sustain. Prod. Consum. 2022, 33, 244–255. [Google Scholar] [CrossRef]
- Sierra Rodriguez, A.; de Santana, T.; MacGill, I.; Ekins-Daukes, N.J.; Reinders, A. A Feasibility Study of Solar PV-Powered Electric Cars Using an Interdisciplinary Modeling Approach for the Electricity Balance, CO2 Emissions, and Economic Aspects: The Cases of The Netherlands, Norway, Brazil, and Australia. Prog. Photovolt. Res. Appl. 2020, 28, 517–532. [Google Scholar] [CrossRef]
- Robisson, B.; Guillemin, S.; Marchadier, L.; Vignal, G.; Mignonac, A. Solar Charging of Electric Vehicles: Experimental Results. Appl. Sci. 2022, 12, 4523. [Google Scholar] [CrossRef]
- Razi, R.; Hajar, K.; Hably, A.; Bacha, S. A User-Friendly Smart Charging Algorithm Based on Energy-Awareness for Different PEV Parking Scenarios. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation (MED), Puglia, Italy, 22–25 June 2021; pp. 392–397. [Google Scholar]
- Tushar, W.; Yuen, C.; Huang, S.; Smith, D.B.; Poor, H.V. Cost Minimization of Charging Stations With Photovoltaics: An Approach With EV Classification. IEEE Trans. Intell. Transp. Syst. 2016, 17, 156–169. [Google Scholar] [CrossRef]
- Yan, D.; Ma, C. Optimal Sizing of A PV Based Electric Vehicle Charging Station Under Uncertainties. In Proceedings of the IECON 2019—45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 4310–4315. [Google Scholar]
- Chen, Q.; Wang, W.; Wang, H.; Dong, Y.; He, S. Information Gap-Based Coordination Scheme for Active Distribution Network Considering Charging/Discharging Optimization for Electric Vehicles and Demand Response. Int. J. Electr. Power Energy Syst. 2023, 145, 108652. [Google Scholar] [CrossRef]
- Wang, J.; Zhou, N.; Wang, Q.; Liu, H. Hierarchically Coordinated Optimization of Power Distribution Systems with Soft Open Points and Electric Vehicles. Int. J. Electr. Power Energy Syst. 2023, 149, 109040. [Google Scholar] [CrossRef]
- Kempton, W.; Tomić, J. Vehicle-to-Grid Power Implementation: From Stabilizing the Grid to Supporting Large-Scale Renewable Energy. J. Power Sources 2005, 144, 280–294. [Google Scholar] [CrossRef]
- Yoo, Y.; Al-Shawesh, Y.; Tchagang, A. Coordinated Control Strategy and Validation of Vehicle-to-Grid for Frequency Control. Energies 2021, 14, 2530. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Sang, L.; Shahid, M.U.; Tang, H. A Comprehensive Study of Implemented International Standards, Technical Challenges, Impacts and Prospects for Electric Vehicles. IEEE Access 2018, 6, 13866–13890. [Google Scholar] [CrossRef]
- Mortaz, E.; Valenzuela, J. Optimizing the Size of a V2G Parking Deck in a Microgrid. Int. J. Electr. Power Energy Syst. 2018, 97, 28–39. [Google Scholar] [CrossRef]
- Fan, P.; Ke, S.; Yang, J.; Li, R.; Li, Y.; Yang, S.; Liang, J.; Fan, H.; Li, T. A Load Frequency Coordinated Control Strategy for Multimicrogrids with V2G Based on Improved MA-DDPG. Int. J. Electr. Power Energy Syst. 2023, 146, 108765. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact Analysis of Vehicle-to-Grid Technology and Charging Strategies of Electric Vehicles on Distribution Networks—A Review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Noel, L.; Zarazua de Rubens, G.; Kester, J.; Sovacool, B.K. Vehicle-to-Grid: A Sociotechnical Transition Beyond Electric Mobility; Springer International Publishing: Cham, Switzerland, 2019; ISBN 978-3-030-04863-1. [Google Scholar]
- Saldaña, G.; San Martin, J.I.; Zamora, I.; Asensio, F.J.; Oñederra, O. Electric Vehicle into the Grid: Charging Methodologies Aimed at Providing Ancillary Services Considering Battery Degradation. Energies 2019, 12, 2443. [Google Scholar] [CrossRef]
- Ravi, S.S.; Aziz, M. Utilization of Electric Vehicles for Vehicle-to-Grid Services: Progress and Perspectives. Energies 2022, 15, 589. [Google Scholar] [CrossRef]
- Huber, D.; De Clerck, Q.; De Cauwer, C.; Sapountzoglou, N.; Coosemans, T.; Messagie, M. Vehicle to Grid Impacts on the Total Cost of Ownership for Electric Vehicle Drivers. World Electr. Veh. J. 2021, 12, 236. [Google Scholar] [CrossRef]
- Qi, S.; Lin, Z.; Song, J.; Lin, X.; Liu, Y.; Ni, M.; Wang, B. Research on Charging-Discharging Operation Strategy for Electric Vehicles Based on Different Trip Patterns for Various City Types in China. World Electr. Veh. J. 2022, 13, 7. [Google Scholar] [CrossRef]
- Shipman, R.; Waldron, J.; Naylor, S.; Pinchin, J.; Rodrigues, L.; Gillott, M. Where Will You Park? Predicting Vehicle Locations for Vehicle-to-Grid. Energies 2020, 13, 1933. [Google Scholar] [CrossRef]
- Han, H.-S.; Oh, E.; Son, S.-Y. Study on EV Charging Peak Reduction with V2G Utilizing Idle Charging Stations: The Jeju Island Case. Energies 2018, 11, 1651. [Google Scholar] [CrossRef]
- Liu, L.; Xie, F.; Huang, Z.; Wang, M. Multi-Objective Coordinated Optimal Allocation of DG and EVCSs Based on the V2G Mode. Processes 2021, 9, 18. [Google Scholar] [CrossRef]
- Di Natale, L.; Funk, L.; Rüdisüli, M.; Svetozarevic, B.; Pareschi, G.; Heer, P.; Sansavini, G. The Potential of Vehicle-to-Grid to Support the Energy Transition: A Case Study on Switzerland. Energies 2021, 14, 4812. [Google Scholar] [CrossRef]
- Luo, L.; Wu, Z.; Gu, W.; Huang, H.; Gao, S.; Han, J. Coordinated Allocation of Distributed Generation Resources and Electric Vehicle Charging Stations in Distribution Systems with Vehicle-to-Grid Interaction. Energy 2020, 192, 116631. [Google Scholar] [CrossRef]
- Mehrjerdi, H.; Rakhshani, E. Vehicle-to-Grid Technology for Cost Reduction and Uncertainty Management Integrated with Solar Power. J. Clean. Prod. 2019, 229, 463–469. [Google Scholar] [CrossRef]
- Amamra, S.-A.; Marco, J. Vehicle-to-Grid Aggregator to Support Power Grid and Reduce Electric Vehicle Charging Cost. IEEE Access 2019, 7, 178528–178538. [Google Scholar] [CrossRef]
- AbuElrub, A.; Hamed, F.; Saadeh, O. Microgrid Integrated Electric Vehicle Charging Algorithm with Photovoltaic Generation. J. Energy Storage 2020, 32, 101858. [Google Scholar] [CrossRef]
- Steffen, T.; Fly, A.; Mitchell, W. Optimal Electric Vehicle Charging Considering the Effects of a Financial Incentive on Battery Ageing. Energies 2020, 13, 4742. [Google Scholar] [CrossRef]
- Wang, D.; Sechilariu, M.; Locment, F. PV-Powered Charging Station for Electric Vehicles: Power Management with Integrated V2G. Appl. Sci. 2020, 10, 6500. [Google Scholar] [CrossRef]
- Jang, Y.; Sun, Z.; Ji, S.; Lee, C.; Jeong, D.; Choung, S.; Bae, S. Grid-Connected Inverter for a PV-Powered Electric Vehicle Charging Station to Enhance the Stability of a Microgrid. Sustainability 2021, 13, 14022. [Google Scholar] [CrossRef]
- Wang, Y.; Gladwin, D. Power Management Analysis of a Photovoltaic and Battery Energy Storage-Based Smart Electrical Car Park Providing Ancillary Grid Services. Energies 2021, 14, 8433. [Google Scholar] [CrossRef]
- Abronzini, U.; Attaianese, C.; D’Arpino, M.; Di Monaco, M.; Tomasso, G. Cost Minimization Energy Control Including Battery Aging for Multi-Source EV Charging Station. Electronics 2019, 8, 31. [Google Scholar] [CrossRef]
- Ul-Haq, A.; Cecati, C.; Al-Ammar, E.A. Modeling of a Photovoltaic-Powered Electric Vehicle Charging Station with Vehicle-to-Grid Implementation. Energies 2017, 10, 4. [Google Scholar] [CrossRef]
- Mumtaz, S.; Ali, S.; Ahmad, S.; Khan, L.; Hassan, S.Z.; Kamal, T. Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies 2017, 10, 1923. [Google Scholar] [CrossRef]
- Onishi, V.C.; Antunes, C.H.; Trovão, J.P.F. Optimal Energy and Reserve Market Management in Renewable Microgrid-PEVs Parking Lot Systems: V2G, Demand Response and Sustainability Costs. Energies 2020, 13, 1884. [Google Scholar] [CrossRef]
- Aluisio, B.; Conserva, A.; Dicorato, M.; Forte, G.; Trovato, M. Optimal Operation Planning of V2G-Equipped Microgrid in the Presence of EV Aggregator. Electr. Power Syst. Res. 2017, 152, 295–305. [Google Scholar] [CrossRef]
- Zhou, T.; Sun, W. Research on Multi-Objective Optimisation Coordination for Large-Scale V2G. IET Renew. Power Gener. 2020, 14, 445–453. [Google Scholar] [CrossRef]
- Modarresi Ghazvini, A.; Olamaei, J. Optimal Sizing of Autonomous Hybrid PV System with Considerations for V2G Parking Lot as Controllable Load Based on a Heuristic Optimization Algorithm. Sol. Energy 2019, 184, 30–39. [Google Scholar] [CrossRef]
- Vermeer, W.; Chandra Mouli, G.R.; Bauer, P. Real-Time Building Smart Charging System Based on PV Forecast and Li-Ion Battery Degradation. Energies 2020, 13, 3415. [Google Scholar] [CrossRef]
- Shi, R.; Li, S.; Zhang, P.; Lee, K.Y. Integration of Renewable Energy Sources and Electric Vehicles in V2G Network with Adjustable Robust Optimization. Renew. Energy 2020, 153, 1067–1080. [Google Scholar] [CrossRef]
- Kajanova, M.; Bracinik, P. The Vehicle-to-Grid Concept with Respect to the Preferences of Electric Vehicle Drivers and Charging Station Operators. Appl. Sci. 2022, 12, 5476. [Google Scholar] [CrossRef]
- Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F. PV-Powered Charging Station: Energy Management with V2G Operation and Energy Cost Analysis. In Proceedings of the 2022 7th International Conference on Smart and Sustainable Technologies (SpliTech), Split, Croatia, 5–8 July 2022; pp. 1–6. [Google Scholar]
- Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F. Real-Time Power Management Including an Optimization Problem for PV-Powered Electric Vehicle Charging Stations. Appl. Sci. 2022, 12, 4323. [Google Scholar] [CrossRef]
- Cheikh-Mohamad, S.; Sechilariu, M.; Locment, F. PV-Powered Charging Station: Energy Management and Cost Optimization. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar]
- Sechilariu, M.; Molines, N.; Richard, G.; Martell-Flores, H.; Locment, F.; Baert, J. Electromobility Framework Study: Infrastructure and Urban Planning for EV Charging Station Empowered by PV-Based Microgrid. IET Electr. Syst. Transp. 2019, 9, 176–185. [Google Scholar] [CrossRef]
- Sechilariu, M.; Locment, F. Direct Current Microgrid Power Modeling and Control. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 133–170. ISBN 978-0-12-803736-2. [Google Scholar]
- Sechilariu, M.; Locment, F. Experimental Evaluation of Urban Direct Current Microgrid. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 209–250. ISBN 978-0-12-803736-2. [Google Scholar]
- Montaño-Salcedo, C.E.; Sechilariu, M.; Locment, F. Human-System Interfaces for PV-Powered Electric Vehicles Charging Station. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–6. [Google Scholar]
- Marra, F.; Yang, G.Y.; Træholt, C.; Larsen, E.; Rasmussen, C.N.; You, S. Demand Profile Study of Battery Electric Vehicle under Different Charging Options. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–7. [Google Scholar]
- Sechilariu, M.; Locment, F. Backup Power Resources for Microgrid. In Urban DC Microgrid; Elsevier: Amsterdam, The Netherlands, 2016; pp. 93–132. ISBN 978-0-12-803736-2. [Google Scholar]
- Wang, D.; Locment, F.; Sechilariu, M. Modelling, Simulation, and Management Strategy of an Electric Vehicle Charging Station Based on a DC Microgrid. Appl. Sci. 2020, 10, 2053. [Google Scholar] [CrossRef]
- ILOG CPLEX Optimization Studio—Overview. Available online: https://www.ibm.com/products/ilog-cplex-optimization-studio (accessed on 16 March 2022).

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value | Parameter | Value |
|---|---|---|---|---|---|
| - | 20% | 0.1 €/kWh | |||
| 50 kW | 80% | 0.7 €/kWh | |||
| 7 kW | 20% | 0.01 €/kWh | |||
| 50 kW | 100% | 1.2 €/kWh | |||
| 22 kW | 50% | 2.5 €/kWh | |||
| 7 kW | 288 V | 0.05 € | |||
| 50 kWh | 130 Ah | 28.9 kWp |
| EVs | M | V2G | ||||
|---|---|---|---|---|---|---|
| EV1 | 31% | 85% | 09:20 | 03 h 52 min | Slow | Yes |
| EV2 | 35% | 75% | 10:00 | 0 h 24 min | Fast | No |
| EV3 | 50% | 80% | 12:05 | 02 h 8 min | Slow | Yes |
| EV4 | 25% | 78% | 13:45 | 01 h 13 min | Average | No |
| EV5 | 29% | 72% | 14:25 | 03 h 5 min | Slow | No |
| Operation Case | Energy Injected into the Public Grid during V2G Period | Energy Injected into the Grid during the Day (kWh) | |||||
|---|---|---|---|---|---|---|---|
| PV (kWh) | EVs (kWh) | Total Energy during V2G (kWh) | % EV/Total | % PV/Total | |||
| Case 1—constant power scenario | Sim w/o opti | 5.88 | 2.91 | 8.79 | 33.10% | 66.90% | 44.03 |
| Sim w/ opti | 0 | 0 | 0 | 0 | 0 | 58.85 | |
| Case 1—variable power scenario | Sim w/o opti | 5.88 | 20.83 | 26.71 | 77.98% | 22.02% | 50.95 |
| Sim w/ opti | 5.88 | 23.33 | 29.21 | 79.87% | 20.13% | 68.34 | |
| Case 2—variable power scenario | Sim w/o opti | 6.21 | 20.83 | 27.04 | 77.04% | 22.96% | 30.52 |
| Sim w/ opti | 7.45 | 25 | 32.45 | 77.04% | 22.96% | 40.91 | |
| Operation Case | Public Grid Cost (c€) | Stationary Storage Cost (c€) | EV Penalty (c€) | Total Cost (c€) | |
|---|---|---|---|---|---|
| Case 1—constant power scenario | Sim w/o opti | −1106 | 32 | 1750 (Dissatisfied client–Risk of losing client) | −1074 |
| Sim w/ opti | −1247 | 9 | 0 | −1238 | |
| Case 1—variable power scenario | Sim w/o opti | −1006 | 40 | 0 | −966 |
| Sim w/ opti | −2942 | 6 | 0 | −2936 | |
| Opti for real conditions | −4210 | 10 | 0 | −4200 | |
| Case 2—variable power scenario | Sim w/o opti | −571 | 28 | 0 | −543 |
| Sim w/ opti | −1745 | 11 | 0 | −1734 | |
| Opti for real conditions | −2710 | 11 | 0 | −2699 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheikh-Mohamad, S.; Celik, B.; Sechilariu, M.; Locment, F. PV-Powered Charging Station with Energy Cost Optimization via V2G Services. Appl. Sci. 2023, 13, 5627. https://doi.org/10.3390/app13095627
Cheikh-Mohamad S, Celik B, Sechilariu M, Locment F. PV-Powered Charging Station with Energy Cost Optimization via V2G Services. Applied Sciences. 2023; 13(9):5627. https://doi.org/10.3390/app13095627
Chicago/Turabian StyleCheikh-Mohamad, Saleh, Berk Celik, Manuela Sechilariu, and Fabrice Locment. 2023. "PV-Powered Charging Station with Energy Cost Optimization via V2G Services" Applied Sciences 13, no. 9: 5627. https://doi.org/10.3390/app13095627
APA StyleCheikh-Mohamad, S., Celik, B., Sechilariu, M., & Locment, F. (2023). PV-Powered Charging Station with Energy Cost Optimization via V2G Services. Applied Sciences, 13(9), 5627. https://doi.org/10.3390/app13095627