Additive Manufacturing in Underwater Applications

 ,
,  ,
,  , , and
, , and
Abstract
:Featured Application
Abstract
1. Introduction
2. Research Methodology
3. Materials
3.1. Ceramics, Concrete, Geopolymers, and Similar
3.2. Polymers
3.3. Metals
3.4. Biomaterials and Others
4. Technologies
4.1. 3D Printing Technologies
4.1.1. Technologies Based on Solid Filaments
4.1.2. Technologies Based on Powders
4.1.3. Technologies Based on Liquid Filaments
4.2. Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs)
5. Areas of Application
5.1. Infrastructure
5.2. Artificial Reefs
5.3. Membranes
5.4. Parts for Underwater Vehicles
5.5. Sensors
5.6. Biological Research
5.7. Other Applications
6. Challenges, Limitations, and Predicted Directions of Development
7. Conclusions
- The development of knowledge about the used materials—for example, there are no washout tests for 3D-printed materials described in the literature;
- The improvement of 3D printing technologies in situ according to the efficiency and quality of the obtained products;
- The development of underwater 3D printing in situ and the application of the technology, especially for deep-sea works, including the maintenance of infrastructure or possible restoration in situ of so-called mezzo reefs (the deepest reef formations);
- The design and modification of AM technologies for the 3D printing of multi-material compositions in one process for underwater applications;
- The employment of technologies such as ROVs and AUVs for underwater 3D printing applications, including process automatization;
- The development of 3D printing for advanced solutions, including 4D printing utilized for the fabrication of smart devices for underwater applications;
- The enhancement of data-based environmental analysis to confirm the real burden of this technology.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rajendran, S.; Palani, G.; Kanakaraj, A.; Shanmugam, V.; Veerasimman, A.; Gądek, S.; Korniejenko, K.; Marimuthu, U. Metal and Polymer Based Composites Manufactured Using Additive Manufacturing—A Brief Review. Polymers 2023, 15, 2564. [Google Scholar] [CrossRef]
- Marczyk, J.; Ostrowska, K.; Hebda, M. Influence of Binder Jet 3D Printing Process Parameters from Irregular Feedstock Powder on Final Properties of Al Parts. Adv. Powder Technol. 2022, 33, 103768. [Google Scholar] [CrossRef]
- Tang, H.P.; Qian, M.; Liu, N.; Zhang, X.Z.; Yang, G.Y.; Wang, J. Effect of Powder Reuse Times on Additive Manufacturing of Ti-6Al-4V by Selective Electron Beam Melting. JOM 2015, 67, 555–563. [Google Scholar] [CrossRef]
- Liber-Kneć, A.; Łagan, S.; Chojnacka-Brożek, A.; Gądek, S. Characterization of 3D Printed PLA Scaffolds Through Experimental and Modeling Approaches. In Innovations in Biomedical Engineering; Springer International Publishing: Cham, Switzerland, 2021; pp. 289–297. [Google Scholar]
- Shabbak, A.; Masoumkhani, F.; Fallah, A.; Amani-Beni, R.; Mohammadpour, H.; Shahbazi, T.; Bakhshi, A. 3D Printing for Cardiovascular Surgery and Intervention: A Review Article. Curr. Probl. Cardiol. 2024, 49, 102086. [Google Scholar] [CrossRef] [PubMed]
- Ziejewska, C.; Marczyk, J.; Korniejenko, K.; Bednarz, S.; Sroczyk, P.; Łach, M.; Mikuła, J.; Figiela, B.; Szechyńska-Hebda, M.; Hebda, M. 3D Printing of Concrete-Geopolymer Hybrids. Materials 2022, 15, 2819. [Google Scholar] [CrossRef] [PubMed]
- Mierzwiński, D.; Łach, M.; Gądek, S.; Lin, W.T.; Tran, D.H.; Korniejenko, K. A Brief overview of the use of additive manufacturing of concreate materials in construction. Acta Innov. 2023, 2023, 22–37. [Google Scholar] [CrossRef]
- Jiang, X.; Liang, Z.; Wu, M.; Lu, J.; Shi, C.; Wang, Q.; Wang, Z.; Jin, Z.; Jiang, L.; Huang, L.; et al. High-Performance Organic Electrochemical Transistors Gated with 3D-Printed Graphene Oxide Electrodes. Nano Res. 2023, 16, 12689–12696. [Google Scholar] [CrossRef]
- Monfared, V.; Ramakrishna, S.; Nasajpour-Esfahani, N.; Toghraie, D.; Hekmatifar, M.; Rahmati, S. Science and Technology of Additive Manufacturing Progress: Processes, Materials, and Applications. Met. Mater. Int. 2023, 29, 3442–3470. [Google Scholar] [CrossRef] [PubMed]
- Soleimanzadeh, H.; Rolfe, B.; Bodaghi, M.; Jamalabadi, M.; Zhang, X.; Zolfagharian, A. Sustainable Robots 4D Printing. Adv. Sustain. Syst. 2023, 7, 2300289. [Google Scholar] [CrossRef]
- Mallakpour, S.; Tabesh, F.; Hussain, C.M. 3D and 4D Printing: From Innovation to Evolution. Adv. Colloid Interface Sci. 2021, 294, 102482. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, X.; Liu, Y.; Ramakrishna, S. Review of Mechanisms and Deformation Behaviors in 4D Printing. Int. J. Adv. Manuf. Technol. 2019, 105, 4633–4649. [Google Scholar] [CrossRef]
- Khalid, M.Y.; Arif, Z.U.; Ahmed, W.; Umer, R.; Zolfagharian, A.; Bodaghi, M. 4D Printing: Technological Developments in Robotics Applications. Sens. Actuators A Phys. 2022, 343, 113670. [Google Scholar] [CrossRef]
- Korniejenko, K.; Pławecka, K.; Kozub, B. An Overview for Modern Energy-Efficient Solutions for Lunar and Martian Habitats Made Based on Geopolymers Composites and 3D Printing Technology. Energies 2022, 15, 9322. [Google Scholar] [CrossRef]
- Pant, M.; Pidge, P.; Nagdeve, L.; Kumar, H. A Review of Additive Manufacturing in Aerospace Application. Rev. Compos. Mater. Av. 2021, 31, 109–115. [Google Scholar] [CrossRef]
- Mohammed, J.S. Applications of 3D Printing Technologies in Oceanography. Methods Oceanogr. 2016, 17, 97–117. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Kouzani, A. Closed-Loop 4D-Printed Soft Robots. Mater. Des. 2020, 188, 108411. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, L.C.; Hu, Y.Y.; Chen, S.G.; Liu, Y. Influential Factors on Mechanical Properties and Microscopic Characteristics of Underwater 3D Printing Concrete. J. Build. Eng. 2023, 77, 107571. [Google Scholar] [CrossRef]
- Seo, E.A.; Kim, W.W.; Kim, S.W.; Kwon, H.K.; Lee, H.J. Mechanical Properties of 3D Printed Concrete with Coarse Aggregates and Polypropylene Fiber in the Air and Underwater Environment. Constr. Build. Mater. 2023, 378, 131184. [Google Scholar] [CrossRef]
- Ryley, M.; Carve, M.; Piola, R.; Scardino, A.J.; Shimeta, J. Comparison of Biofouling on 3D-Printing Materials in the Marine Environment. Int. Biodeterior. Biodegrad. 2021, 164, 105293. [Google Scholar] [CrossRef]
- Levy, N.; Simon-Blecher, N.; Ben-Ezra, S.; Yuval, M.; Doniger, T.; Leray, M.; Karako-Lampert, S.; Tarazi, E.; Levy, O. Evaluating Biodiversity for Coral Reef Reformation and Monitoring on Complex 3D Structures Using Environmental DNA (EDNA) Metabarcoding. Sci. Total Environ. 2023, 856, 159051. [Google Scholar] [CrossRef]
- Fu, Y.; Guo, N.; Wang, G.; Yu, M.; Cheng, Q.; Zhang, D. Underwater Additive Manufacturing of Ti-6Al-4V Alloy by Laser Metal Deposition: Formability, Gran Growth and Microstructure Evolution. Mater. Des. 2021, 197, 109196. [Google Scholar] [CrossRef]
- Najem, J.; Akle, B. Design and Development of a Biomimetic Jellyfish Robot That Features Ionic Polymer Metal Composites Actuators. In Proceedings of the ASME 2011 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Scottsdale, AZ, USA, 18–21 September 2011. [Google Scholar]
- Sanchez-Gonzalez, P.-L.; Díaz-Gutiérrez, D.; Leo, T.; Núñez-Rivas, L. Toward Digitalization of Maritime Transport? Sensors 2019, 19, 926. [Google Scholar] [CrossRef] [PubMed]
- Scopus. Analyze Search Results. Available online: https://www.scopus.com/term/analyzer.uri?sid=188243f8e3cdd17f881cfb7a99920bc5&origin=resultslist&src=s&s=TITLE-ABS-KEY%28%223D+printing%22%29&sort=plf-f&sdt=sisr&sot=b&sl=28&count=648&analyzeResults=Analyze+results&ref=%28underwater%29&txGid=997174eed21cc8368ab7fafa38e6098e (accessed on 2 January 2024).
- Wang, Y.; Qiu, L.C.; Chen, S.G.; Liu, Y. 3D Concrete Printing in Air and under Water: A Comparative Study on the Buildability and Interlayer Adhesion. Constr. Build. Mater. 2024, 411, 134403. [Google Scholar] [CrossRef]
- Ly, O.; Yoris-Nobile, A.I.; Sebaibi, N.; Blanco-Fernandez, E.; Boutouil, M.; Castro-Fresno, D.; Hall, A.E.; Herbert, R.J.H.; Deboucha, W.; Reis, B.; et al. Optimisation of 3D Printed Concrete for Artificial Reefs: Biofouling and Mechanical Analysis. Constr. Build. Mater. 2021, 272, 121649. [Google Scholar] [CrossRef]
- Mazhoud, B.; Perrot, A.; Picandet, V.; Rangeard, D.; Courteille, E. Underwater 3D Printing of Cement-Based Mortar. Constr. Build. Mater. 2019, 214, 458–467. [Google Scholar] [CrossRef]
- Woo, S.J.; Yang, J.M.; Lee, H.; Kwon, H.K. Comparison of Properties of 3d-Printed Mortar in Air vs. Underwater. Materials 2021, 14, 5888. [Google Scholar] [CrossRef]
- Yang, J.M.; Park, I.B.; Lee, H.; Kwon, H.K. Effects of Nozzle Details on Print Quality and Hardened Properties of Underwater 3D Printed Concrete. Materials 2023, 16, 34. [Google Scholar] [CrossRef]
- Li, L.G.; Xiao, B.F.; Fang, Z.Q.; Xiong, Z.; Chu, S.H.; Kwan, A.K.H. Feasibility of Glass/Basalt Fiber Reinforced Seawater Coral Sand Mortar for 3D Printing. Addit. Manuf. 2021, 37, 101684. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, S.; Qiu, L.; Nasr, A.A.; Liu, Y. Experimental Study on the Slump-Flow Underwater for Anti-Washout Concrete. Constr. Build. Mater. 2023, 365, 130026. [Google Scholar] [CrossRef]
- Nasr, A.A.; Chen, S.; Jin, F. Washout Resistance of Self-Protected Underwater Concrete in Freshwater and Seawater. Constr. Build. Mater. 2021, 289, 123186. [Google Scholar] [CrossRef]
- Yoris-Nobile, A.I.; Slebi-Acevedo, C.J.; Lizasoain-Arteaga, E.; Indacoechea-Vega, I.; Blanco-Fernandez, E.; Castro-Fresno, D.; Alonso-Estebanez, A.; Alonso-Cañon, S.; Real-Gutierrez, C.; Boukhelf, F.; et al. Artificial Reefs Built by 3D Printing: Systematisation in the Design, Material Selection and Fabrication. Constr. Build. Mater. 2023, 362, 129766. [Google Scholar] [CrossRef]
- Levy, N.; Berman, O.; Yuval, M.; Loya, Y.; Treibitz, T.; Tarazi, E.; Levy, O. Emerging 3D Technologies for Future Reformation of Coral Reefs: Enhancing Biodiversity Using Biomimetic Structures Based on Designs by Nature. Sci. Total Environ. 2022, 830, 154749. [Google Scholar] [CrossRef] [PubMed]
- CPSdrone 3D Printing Underwater Actually WORKS. Available online: https://www.youtube.com/watch?v=FY7lJexBUZQ (accessed on 4 January 2024).
- Baena, J.C.; Wang, C.; Fu, Y.; Kabir, I.I.; Yuen, A.C.Y.; Peng, Z.; Yeoh, G.H. A New Fabrication Method of Designed Metamaterial Based on a 3D-Printed Structure for Underwater Sound Absorption Applications. Appl. Acoust. 2023, 203, 109221. [Google Scholar] [CrossRef]
- Champion, B.T.; Jamshidi, M.; Joordens, M.A. 3D Printed Underwater Housing. In Proceedings of the World Automation Congress Proceedings, Rio Grande, PR, USA, 31 July–4 August 2016; IEEE Computer Society: Washington, DC, USA, 2016. [Google Scholar]
- Loni, Z.M.; Espinosa, H.G.; Thiel, D.V. Vertically Directed Microwave Radiation from a Floating Hemispherical Antenna. In Proceedings of the 2018 Australian Microwave Symposium, AMS 2018—Conference Proceedings, Brisbane, QLD, Australia, 6–7 February 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 45–46. [Google Scholar]
- Khaleed, H.M.T.; Badruddin, I.A.; Saquib, A.N.; Addas, M.F.; Kamangar, S.; Yunus Khan, T.M. Novel Approach to Manufacture an AUV Propeller by Additive Manufacturing and Error Analysis. Appl. Sci. 2019, 9, 4413. [Google Scholar] [CrossRef]
- Stefanita Grigore, L.; Stefan, A.; Orban, O. Using PET-G to Design an Underwater Rover Through 3D PrintingTtechnology. Mater. Plast. 1964, 57, 189–201. [Google Scholar] [CrossRef]
- Ștefan, A.G.; Grigore, L.Ș.; Marzavan, S.; Priescu, I.; Oncioiu, I. Theoretical and Experimental Aspects Regarding the Forced Mounting of a Cylinder Containing the Electronics of a Mini Submarine. J. Mar. Sci. Eng. 2021, 9, 855. [Google Scholar] [CrossRef]
- Dileep, B.; Doddamani, M. Compressive Response of 3D Printed Graded Foams. Compos. Part C Open Access 2021, 6, 100181. [Google Scholar] [CrossRef]
- Krohmann, S.; Rautmann, L.L.; Glatzer, L.; Kosleck, S. Experimental Studies of Additive Manufacturing for Subsea Enclosures. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 5–10 June 2022. [Google Scholar]
- Luthy, K.; Miller, D. Case Study of a 3D Printed Underwater Housing. In Proceedings of the Oceans Conference Record (IEEE), San Diego, CA, USA, 20–23 September 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar]
- Deng, Z.; Wang, Y.; Zhang, D.; Chen, C. 3D Printing Technology Meets Marine Biofouling: A Study on Antifouling Resin for Protecting Marine Sensors. Addit. Manuf. 2023, 73, 103697. [Google Scholar] [CrossRef]
- Im, H.; Roh, S.C.; Kim, C.K. Characteristics of Thermoplastic Polyurethane Composites Containing Surface Treated Multiwalled Carbon Nanotubes for the Underwater Applications. Macromol. Res. 2013, 21, 614–623. [Google Scholar] [CrossRef]
- Kim, D.; Sasidharanpillai, A.; Lee, Y.; Lee, S. Self-Stratified Versatile Coatings for Three-Dimensional Printed Underwater Physical Sensors Applications. Nano Lett. 2021, 21, 6820–6827. [Google Scholar] [CrossRef]
- Wang, Z.D.; Sun, G.F.; Lu, Y.; Chen, M.Z.; Lan, H.F.; Bi, K.D.; Ni, Z.H. High-Performance Ti-6Al-4V with Graded Microstructure and Superior Properties Fabricated by Powder Feeding Underwater Laser Metal Deposition. Surf. Coat. Technol. 2021, 408, 126778. [Google Scholar] [CrossRef]
- Breddermann, K.; Drescher, P.; Polzin, C.; Seitz, H.; Paschen, M. Printed Pressure Housings for Underwater Applications. Ocean Eng. 2016, 113, 57–63. [Google Scholar] [CrossRef]
- Hur, B.; Morgan, J.A.; Langari, R.; Jordan, J.; Caleb, M.; Stewart, C.; Malbec, B.; James, D.K. 3-D Printed Metal and Plastic Propeller Design and Manufacturing for Small-Scale Underwater Thrusters 3D Printed Metal and Plastic Propeller Design and Manufacturing for Small-Scale Underwater Thrusters. In Proceedings of the 2019 ASEE Annual Conference & Exposition, Tampa, FL, USA, 15 June–19 October 2019. [Google Scholar]
- Chen, C.; Wang, Y.; Ge, F. Construction of Corrosion Resistant Stainless Steel Mesh and the Design for Protecting Optical Window Free from Biofouling. Ocean Eng. 2022, 264, 112564. [Google Scholar] [CrossRef]
- Calle, M.A.G.; Salmi, M.; Mazzariol, L.M.; Alves, M.; Kujala, P. Additive Manufacturing of Miniature Marine Structures for Crashworthiness Verification: Scaling Technique and Experimental Tests. Mar. Struct. 2020, 72, 102764. [Google Scholar] [CrossRef]
- Xia, X.; Lan, Y.; Zhou, T. Low-Frequency Transducer with a Periodic Displacement Amplification Structure Based on 3D Printing. Appl. Acoust. 2023, 204, 109232. [Google Scholar] [CrossRef]
- Li, W.; Wang, M.; Wang, S.; Wang, X.; Avila, A.; Kuang, X.; Mu, X.; Garciamendez, C.E.; Jiang, Z.; Manríquez, J.; et al. An Adhesive Bioink toward Biofabrication under Wet Conditions. Small 2023, 19, e2205078. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.; Yin, C.; Mo, A.; Hong, G. Applications of Hydrogel with Special Physical Properties in Bone and Cartilage Regeneration. Materials 2021, 14, 235. [Google Scholar] [CrossRef]
- Chen, W.P.; Hao, D.Z.; Hao, W.J.; Guo, X.L.; Jiang, L. Hydrogel with Ultrafast Self-Healing Property Both in Air and Underwater. ACS Appl. Mater. Interfaces 2018, 10, 1258–1265. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, D.; Wang, C.; Wu, J.; Xu, X.; Yang, X.; Sun, C.; Jiang, P.; Wang, X. 3D Printing of Octopi-Inspired Hydrogel Suckers with Underwater Adaptation for Reversible Adhesion. Chem. Eng. J. 2023, 457, 141268. [Google Scholar] [CrossRef]
- de Lacalle, J.L.; Picchio, M.L.; Dominguez-Alfaro, A.; Serrano, R.R.-M.; Marchiori, B.; del Agua, I.; Lopez-Larrea, N.; Criado-Gonzalez, M.; Malliaras, G.G.; Mecerreyes, D. Hydrophobic Eutectogels as Electrodes for Underwater Electromyography Recording. ACS Mater. Lett. 2023, 5, 3340–3346. [Google Scholar] [CrossRef]
- Li, Z.; Yang, S.; Wang, D.; Shan, H.; Chen, D.; Fei, C.; Xiao, M.; Yang, Y. Focus of Ultrasonic Underwater Sound with 3D Printed Phononic Crystal. Appl. Phys. Lett. 2021, 119, 073501. [Google Scholar] [CrossRef]
- Phamduy, P.; Vazquez, M.A.; Kim, C.; Mwaffo, V.; Rizzo, A.; Porfiri, M. Design and Characterization of a Miniature Free-Swimming Robotic Fish Based on Multi-Material 3D Printing. Int. J. Intell. Robot. Appl. 2017, 1, 209–223. [Google Scholar] [CrossRef]
- Kafle, A.; Luis, E.; Silwal, R.; Pan, H.M.; Shrestha, P.L.; Bastola, A.K. 3d/4d Printing of Polymers: Fused Deposition Modelling (Fdm), Selective Laser Sintering (Sls), and Stereolithography (Sla). Polymers 2021, 13, 3101. [Google Scholar] [CrossRef] [PubMed]
- Phillips, B.T.; Allder, J.; Bolan, G.; Nagle, R.S.; Redington, A.; Hellebrekers, T.; Borden, J.; Pawlenko, N.; Licht, S. Additive Manufacturing Aboard a Moving Vessel at Sea Using Passively Stabilized Stereolithography (SLA) 3D Printing. Addit. Manuf. 2020, 31, 100969. [Google Scholar] [CrossRef]
- Li, H.; Raza, A.; Yuan, S.; AlMarzooqi, F.; Fang, N.X.; Zhang, T.J. Biomimetic On-Chip Filtration Enabled by Direct Micro-3D Printing on Membrane. Sci. Rep. 2022, 12, 8178. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Wang, Q.; Wu, Z.; Ma, Z.; Yan, C.; Shi, Y.; Su, B. 3D-Printed Underwater Super-Oleophobic Shark Skin toward the Electricity Generation through Low-Adhesion Sliding of Magnetic Nanofluid Droplets. Adv. Funct. Mater. 2021, 31, 2103776. [Google Scholar] [CrossRef]
- Griffiths, A.; Dikarev, A.; Green, P.R.; Lennox, B.; Poteau, X.; Watson, S. AVEXIS—Aqua Vehicle Explorer for in-Situ Sensing. IEEE Robot. Autom. Lett. 2016, 1, 282–287. [Google Scholar] [CrossRef]
- Coreixas De Moraes, C.; Santiago, R.C. AUV Scaled Model Prototyping Using 3D Printing Techniques; AUV Scaled Model Prototyping Using 3D Printing Techniques. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Britto, R.A.; Sinha, S.; Palit, S.; Selvakumar, A. PH Monitoring IOT Controlled Biomimetic Robotic Fish. Int. J. Recent Technol. Eng. 2019, 7, 233–237. [Google Scholar]
- Thakkar, P.; Sanghvi, M.; Lekurwale, N.; Sawant, D. Lumina Remotely Operated Vehicle. In Proceedings of the 2022 IEEE Delhi Section Conference, DELCON 2022, New Delhi, India, 11–13 February 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Ziaeefard, S.; Ribeiro, G.A.; Mahmoudian, N. GUPPIE, Underwater 3D Printed Robot a Game Changer in Control Design Education. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 2789–2794. [Google Scholar]
- Vasileiou, M.; Manos, N.; Vasilopoulos, N.; Douma, A.; Kavallieratou, E. <scp>kalypso</Scp> Autonomous Underwater Vehicle: A 3D-Printed Underwater Vehicle for Inspection at Fisheries. J. Mech. Robot. 2024, 16, 041003. [Google Scholar] [CrossRef]
- Song, S.; Yu, S.C. Underwater Marking AUV Using Paraffin Wax. In Proceedings of the Autonomous Underwater Vehicles 2016, AUV 2016, Tokyo, Japan, 6–9 November 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 33–37. [Google Scholar]
- Ay, M.; Korkmaz, D.; Koca, G.O.; Bal, C.; Akpolat, Z.H.; Bingol, M.C. Mechatronic Design and Manufacturing of the Intelligent Robotic Fish for Bio-Inspired Swimming Modes. Electronics 2018, 7, 118. [Google Scholar] [CrossRef]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard Design and Fabrication of Custom 3D-Printed Soft Robotic Manipulators for the Investigation of Delicate Deep-Sea Organisms. PLoS ONE 2018, 13, e0200386. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Wang, Q.; Fang, X.; Liang, W.; Cao, Y.; Zhao, C.; Li, L.; Liu, C.; Wang, K. Application and Development of Autonomous Robots in Concrete Construction: Challenges and Opportunities. Drones 2022, 6, 424. [Google Scholar] [CrossRef]
- Soomro, A.M.; Memon, F.H.; Lee, J.W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D Printed Multi-Material Soft Bio-Inspired Frog for Underwater Synchronous Swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Mohd Yusoff, N.H.; Chong, C.H.; Wan, Y.K.; Cheah, K.H.; Wong, V.L. Optimization Strategies and Emerging Application of Functionalized 3D-Printed Materials in Water Treatment: A Review. J. Water Process Eng. 2023, 51, 103410. [Google Scholar] [CrossRef]
- Tijing, L.D.; Dizon, J.R.C.; Ibrahim, I.; Nisay, A.R.N.; Shon, H.K.; Advincula, R.C. 3D Printing for Membrane Separation, Desalination and Water Treatment. Appl. Mater. Today 2020, 18, 100486. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, X.; Xie, T.; Miao, J. A New Sensor Inspired by the Lateral-Line System of Fish Using the Self-Powered D33 Mode Piezoelectric Diaphragm for Hydrodynamic Sensing. Mech. Syst. Signal Process 2020, 141, 106476. [Google Scholar] [CrossRef]
- Coltelli, M.A.; Catterlin, J.; Scherer, A.; Kartalov, E.P. Simulations of 3D-Printable Biomimetic Artificial Muscles Based on Microfluidic Microcapacitors for Exoskeletal Actuation and Stealthy Underwater Propulsion. Sens. Actuators A Phys. 2021, 325, 112700. [Google Scholar] [CrossRef]
- Angel, M.; Gonzales, C.; Kujala, P. 3D Printing Miniature Marine Structures Models for Structural Analysis Purpose: Is It Possible? In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Glasgow, UK, 9–14 June 2019.
- Musipov, H.N.; Nikitin, V.S.; Bakanovskaya, L.N. Technology for Subsea 3D Printing Structures for Oil and Gas Production in Arctic Region. In Proceedings of the IOP Conference Series: Materials Science and Engineering, 29 November 2017; Institute of Physics Publishing: Bristol, UK, 2017; Volume 262. Available online: https://iopscience.iop.org/article/10.1088/1757-899X/262/1/012069/meta (accessed on 30 January 2024).
- Erioli, A.; Zomparelli, A. Emergent Reefs. In Proceedings of the ACADIA 2012—Synthetic Digital Ecologies: Proceedings of the 32nd Annual Conference of the Association for Computer Aided Design in Architecture, San Francisco, CA, USA, 18–21 October 2012; ACADIA: New York, NY, USA, 2012; pp. 139–148. Available online: https://portal.findresearcher.sdu.dk/en/publications/emergent-reefs (accessed on 30 January 2024).
- Berman, O.; Levy, N.; Parnas, H.; Levy, O.; Tarazi, E. Exploring New Frontiers in Coral Nurseries: Leveraging 3D Printing Technology to Benefit Coral Growth and Survival. J. Mar. Sci. Eng. 2023, 11, 1695. [Google Scholar] [CrossRef]
- Riera, E.; Hubas, C.; Ungermann, M.; Rigot, G.; Pey, A.; Francour, P.; Rossi, F. Artificial Reef Effectiveness Changes among Types as Revealed by Underwater Hyperspectral Imagery. Restor. Ecol. 2023, 31, e13978. [Google Scholar] [CrossRef]
- Leonard, C.; Hédouin, L.; Lacorne, M.C.; Dalle, J.; Lapinski, M.; Blanc, P.; Nugues, M.M. Performance of Innovative Materials as Recruitment Substrates for Coral Restoration. Restor. Ecol. 2022, 30, e13625. [Google Scholar] [CrossRef]
- Jin, Z.; Mei, H.; Liu, H.; Pan, L.; Yan, Y.; Cheng, L. High-Strength, Superhydrophilic/Underwater Superoleophobic Multifunctional Ceramics for High Efficiency Oil-Water Separation and Water Purification. Mater. Today Nano 2022, 18, 100199. [Google Scholar] [CrossRef]
- Wang, Z.; Zhan, Z.; Chen, L.; Duan, G.; Cheng, P.; Kong, H.; Chen, Y.; Duan, H. 3D-Printed Bionic Solar Evaporator. Sol. RRL 2022, 6, 2101063. [Google Scholar] [CrossRef]
- Yao, Y.; Li, H.; Sun, Y.; Chang, Z. A Bionic Degassing Device Inspired by Gills: Application on Underwater Oil and Gas Detection. J. Bionic Eng. 2023, 20, 253–266. [Google Scholar] [CrossRef]
- Yanar, N.; Kallem, P.; Son, M.; Park, H.; Kang, S.; Choi, H. A New Era of Water Treatment Technologies: 3D Printing for Membranes. J. Ind. Eng. Chem. 2020, 91, 1–14. [Google Scholar] [CrossRef]
- Issac, M.N.; Kandasubramanian, B. Review of Manufacturing Three-Dimensional-Printed Membranes for Water Treatment. Environ. Sci. Pollut. Res. 2020, 27, 36091–36108. [Google Scholar] [CrossRef] [PubMed]
- Gu, Q.; Ng, T.C.A.; Bao, Y.; Ng, H.Y.; Tan, S.C.; Wang, J. Developing Better Ceramic Membranes for Water and Wastewater Treatment: Where Microstructure Integrates with Chemistry and Functionalities. Chem. Eng. J. 2021, 428, 130456. [Google Scholar] [CrossRef]
- Song, Y.; Wang, B.; Altemose, P.; Kowall, C.; Li, L. 3D-Printed Membranes with a Zwitterionic Hydrogel Coating for More Robust Oil-Water Separation. Ind. Eng. Chem. Res. 2020, 59, 21058–21065. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, D.; Peng, E.; Ding, J. 3D-Printed Ceramic Structures with in Situ Grown Whiskers for Effective Oil/Water Separation. Chem. Eng. J. 2019, 373, 1223–1232. [Google Scholar] [CrossRef]
- Yu, F.; Hu, Q.; Dong, L.; Cui, X.; Chen, T.; Xin, H.; Liu, M.; Xue, C.; Song, X.; Ai, F.; et al. 3D Printed Self-Driven Thumb-Sized Motors for in-Situ Underwater Pollutant Remediation. Sci. Rep. 2017, 7, srep41169. [Google Scholar] [CrossRef]
- Yan, C.; Zhang, X.; Ji, Z.; Wang, X.; Zhou, F. 3D-Printed Electromagnetic Actuator for Bionic Swimming Robot. J. Mater. Eng. Perform. 2021, 30, 6579–6587. [Google Scholar] [CrossRef]
- Mullen, A.D.; Dichek, D.J.G.; Lawrence, J.D.; Meister, M.R.; Bryson, F.E.; Hurwitz, B.C.; Spears, A.M.; Washam, P.M.; Quartini, E.; Schmidt, B.E. A Robust Compact Water Sampler for Underwater Robotic Vehicles. In Proceedings of the 2020 Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar]
- Zhuo, F.; Zhou, J.; Liu, Y.; Xie, J.; Chen, H.; Wang, X.; Luo, J.; Fu, Y.; Elmarakbi, A.; Duan, H. Kirigami-Inspired 3D-Printable MXene Organohydrogels for Soft Electronics. Adv. Funct. Mater. 2023, 33, 2308487. [Google Scholar] [CrossRef]
- Huo, J.; Wang, J.; Guo, Y.; Qiu, W.; Chen, M.; Asada, H.; Wan, F.; Song, C. Reconfigurable Design and Modeling of an Underwater Superlimb for Diving Assistance. Adv. Intell. Syst. 2023, 5, 2300245. [Google Scholar] [CrossRef]
- Khudiyev, T.; Grena, B.; Loke, G.; Hou, C.; Jang, H.; Lee, J.; Noel, G.H.; Alain, J.; Joannopoulos, J.; Xu, K.; et al. Thermally Drawn Rechargeable Battery Fiber Enables Pervasive Power. Mater. Today 2022, 52, 80–89. [Google Scholar] [CrossRef]
- He, Y.; Guo, S.; Shi, L.; Pan, S.; Wang, Z. 3D Printing Technology-Based an Amphibious Spherical Robot. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, IEEE ICMA 2014, Tianjin, China, 3–6 August 2014; IEEE Computer Society: Washington, DC, USA, 2014; pp. 1382–1387. [Google Scholar]
- Tran, L.G.; Park, W.T. Biomimetic Flow Sensor for Detecting Flow Rate and Direction as an Application for Maneuvering Autonomous Underwater Vehicle. Int. J. Precis. Eng. Manuf.—Green Technol. 2022, 9, 163–173. [Google Scholar] [CrossRef]
- Zheng, X.; Kamat, A.M.; Krushynska, A.O.; Cao, M.; Kottapalli, A.G.P. 3D Printed Graphene Piezoresistive Microelectromechanical System Sensors to Explain the Ultrasensitive Wake Tracking of Wavy Seal Whiskers. Adv. Funct. Mater. 2022, 32, 2207274. [Google Scholar] [CrossRef]
- Sayegh, M.A.; Daraghma, H.; Mekid, S.; Bashmal, S. Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors. Sensors 2022, 22, 2705. [Google Scholar] [CrossRef]
- Gul, J.Z.; Su, K.Y.; Choi, K.H. Fully 3D Printed Multi-Material Soft Bio-Inspired Whisker Sensor for Underwater-Induced Vortex Detection. Soft Robot. 2018, 5, 122–132. [Google Scholar] [CrossRef]
- Cho, S.J.; Nam, T.S.; Choi, S.Y.; Kim, M.K.; Kim, S. 3D Printed Multi-Channel EEG Sensors for Zebrafish. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015. [Google Scholar]
- Cho, S.J.; Byun, D.; Nam, T.S.; Choi, S.Y.; Lee, B.G.; Kim, M.K.; Kim, S. A 3D-Printed Sensor for Monitoring Biosignals in Small Animals. J. Healthc. Eng. 2017, 2017, 9053764. [Google Scholar] [CrossRef]
- Bräuer-Burchardt, C.; Heinze, M.; Schmidt, I.; Meng, L.; Ramm, R.; Kühmstedt, P.; Notni, G. Handheld Underwater 3D Sensor Based on Fringe Projection Technique. In Proceedings of the Videometrics, Range Imaging, and Applications XIII, Munich, Germany, 21 June 2015; SPIE: Bellingham, WA, USA, 2015; Volume 9528, p. 952809. [Google Scholar]
- Brewin, R.J.W.; Brewin, T.G.; Phillips, J.; Rose, S.; Abdulaziz, A.; Wimmer, W.; Sathyendranath, S.; Platt, T. A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters. Sensors 2019, 19, 936. [Google Scholar] [CrossRef]
- Phamduy, P.; Vazquez, M.; Rizzo, A.; Porfiri, M. Miniature Underwater Robotic Fish for Animal-Robot Interactions. In Proceedings of the Dynamic Systems and Control Conference, Minneapolis, MN, USA, 12–14 October 2016. [Google Scholar]
- Song, Z.; Mazzola, C.; Schwartz, E.; Chen, R.; Finlaw, J.; Krieg, M.; Mohseni, K. A Compact Autonomous Underwater Vehicle With Cephalopod-Inspired Propulsion. Mar. Technol. Soc. J. 2016, 50, 88–101. [Google Scholar] [CrossRef]
- Singh Matharu, P.; Wang, Z.; Costello, J.H.; Colin, S.P.; Baughman, R.H.; Tadesse, Y.T. SoJel –A 3D Printed Jellyfish-like Robot Using Soft Materials for Underwater Applications. Ocean Eng. 2023, 279, 114427. [Google Scholar] [CrossRef]
- Takishima, Y.; Yoshida, K.; Khosla, A.; Kawakami, M.; Furukawa, H. Fully 3D-Printed Hydrogel Actuator for Jellyfish Soft Robots. ECS J. Solid State Sci. Technol. 2021, 10, 037002. [Google Scholar] [CrossRef]
- Liu, K.; Chen, W.; Yang, W.; Jiao, Z.; Yu, Y. Review of the Research Progress in Soft Robots. Appl. Sci. 2023, 13, 120. [Google Scholar] [CrossRef]
- Patterson, Z.J.; Patel, D.K.; Bergbreiter, S.; Yao, L.; Majidi, C. A Method for 3D Printing and Rapid Prototyping of Fieldable Untethered Soft Robots. Soft Robot. 2023, 10, 292–300. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Kong, D.; Shi, Y.; Cai, M.; Yu, Q.; Li, S.; Wang, K.; Liu, C. Recent Progress on Underwater Soft Robots: Adhesion, Grabbing, Actuating, and Sensing. Front. Bioeng. Biotechnol. 2023, 11, 1196922. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Tan, P.; Shi, B.; Ouyang, H.; Jiang, D.; Liu, Z.; Li, H.; Yu, M.; Wang, C.; Qu, X.; et al. A Bionic Stretchable Nanogenerator for Underwater Sensing and Energy Harvesting. Nat. Commun. 2019, 10, 2695. [Google Scholar] [CrossRef] [PubMed]
- Peterman, D.J.; Ritterbush, K.A. Vertical Escape Tactics and Movement Potential of Orthoconic Cephalopods. PeerJ 2021, 9, e11797. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Y.; Huang, S.; Huang, T.-Y.; Dong, A.; Cao, D.; Li, H.; Xue, Y.; Lv, P.; Duan, H. Superrepellency of Underwater Hierarchical Structures on Salvinia Leaf. Proc. Natl. Acad. Sci. USA 2020, 117, 2282–2287. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Bae, J. Microphase Separation-Driven Sequential Self-Folding of Nanocomposite Hydrogel/Elastomer Actuators. Adv. Funct. Mater. 2022, 32, 2200157. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, X.; Gong, L.; Chen, G.; Wang, X. A Bionic Adhesive Disc for Torrent Immune Locomotion Inspired by the Guizhou Gastromyzontidae. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, ROBIO 2019, Dali, China, 6–8 December 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 132–135. [Google Scholar]
- Zhou, W.; Wu, X. Enhanced Adhesion of Synthetic Discs with Micro-Patterned Margins. Biomimetics 2022, 7, 202. [Google Scholar] [CrossRef]
- Jia, N.; Wang, T.; Duan, J.; Qiang, K.; Xia, S.; Du, H.; Li, F.; Xu, Z. High-Performance Curved Piezoelectric Single-Crystal Composites via 3D-Printing-Assisted Dice and Insert Technology for Underwater Acoustic Transducer Applications. ACS Appl. Mater. Interfaces 2022, 14, 8137–8145. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Rohde, C.; Cushing, C.W.; Li, J.; Tan, Z.J.; Du, H.; Peng, X.; Wilson, P.S.; Haberman, M.R.; Fang, N.X.; et al. Anisotropic Metallic Microlattice Structures for Underwater Operations. Adv. Eng. Mater. 2023, 25, 2201294. [Google Scholar] [CrossRef]
- de la Peña Zarzuelo, I.; Freire Soeane, M.J.; López Bermúdez, B. Industry 4.0 in the Port and Maritime Industry: A Literature Review. J. Ind. Inf. Integr. 2020, 20, 100173. [Google Scholar] [CrossRef]
- Jha, S.K. Emerging Technologies: Impact on Shipbuilding. Marit. Aff. 2016, 12, 78–88. [Google Scholar] [CrossRef]
- Baillon, P.; Dixon, S.; Faust, K.; Herman, P.; Seabring, H.; Wood, S. Stereolithography 3D Printed Resin Pressure Enclosures Applied in the Marine Environment. In Proceedings of the Oceans Conference Record (IEEE), Hampton Roads, VA, USA, 17–20 October 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Kozlova, E.V.; Yakinchuk, V.V.; Starikov, K.A.; Bolshakova, A.V.; Bocharov, A.A. Life Cycle Management of the 3D-Printer Technology to Design an Underwater Drone Hull to Study the Arctic. In Proceedings of the IOP Conference Series: Earth and Environmental Science, 14 January 2021; IOP Publishing Ltd.: Bristol, UK, 2021; Volume 625. Available online: https://iopscience.iop.org/article/10.1088/1755-1315/625/1/012016 (accessed on 30 January 2024).
- Reyes, G.; Vega-Coloma, M.; Antonova, A.; Ajdary, R.; Jonveaux, S.; Flanigan, C.; Lautenbacher, N.; Rojas, O.J. Direct CO 2 Capture by Alkali-Dissolved Cellulose and Sequestration in Building Materials and Artificial Reef Structures. Adv. Mater. 2023, 35, e2209327. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
| No. | Material | Investigated Properties | Main Findings | Reference |
|---|---|---|---|---|
| 1 | OPC (CEM 1 52.5 N) + superplasticizer + anti-washout admixture | Assessment of the feasibility of underwater 3D printing. Compressive strength (CS). Young’s modulus (YM). | Decrease of 7% in CS and 11% in YM when comparing 3D-printable mortar specimens in water with those printed in the air. | [28] |
| 2 | OPC + viscosity-modifying agent | In the fresh state: printability and buildability. Samples after curing: density, CS, interlayer bond strength, flexural and splitting tensile strengths. | An increased number of defects and discontinuities occurred in samples of 3D printing underwater. The buildability decreased—reduction in the layer height due to changes in weight and pressure underwater. The density and CS of the elements printed underwater were smaller than in those printed in the air, but the interlayer bond strength was better for those printed underwater. The flexural tensile strength was also better for samples printed underwater. | [29] |
| 3 | 42.5 sulfoaluminate cement (SAC) + superplasticizer + anti-washout admixture | Buildability and interlayer bonding. | The interlayer adhesion for samples printed underwater was 20.4% less than for the samples printed in air. Proper permeability coefficient supports interfacial bonding; excessive water penetration can decrease interlayer bonding. | [26] |
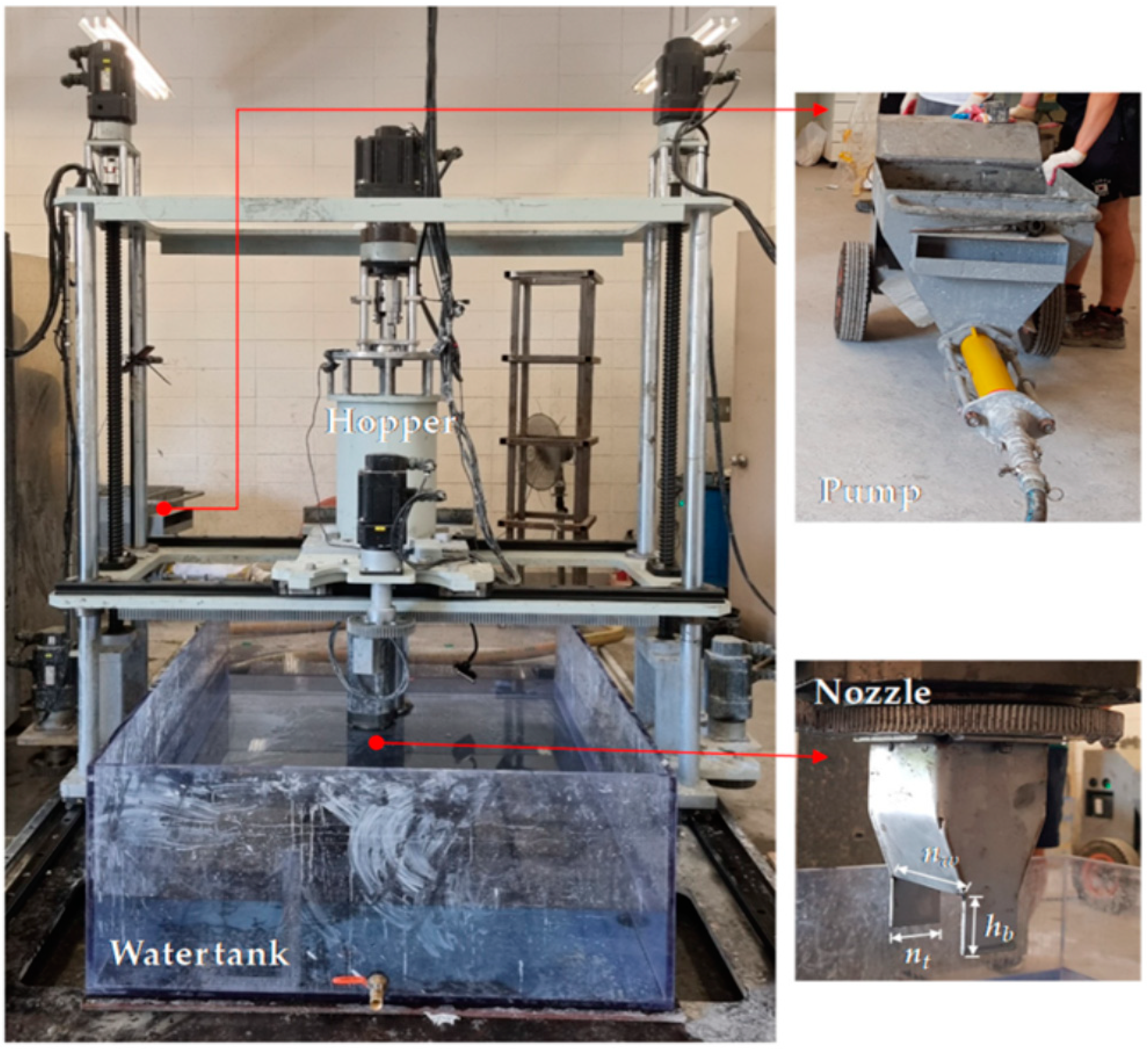
| 4 | Cement + sand + silica fume | Nozzle construction optimization and material properties during the printing process. | Worse surface quality for printing underwater compared to printing in the air. | [30] |
| 5 | Seawater and marine sediments (coral sand) + glass/basalt fibers | Possibility to use for in situ 3D printing of marine resources for design mortar or cement. | Composites exhibited good buildability. The 3D-printed composites had worse properties than those produced using traditional casting technology; however, they had sufficient properties for use in remote areas for infrastructural projects. | [31] |
| 6 | 42.5 R sulphoaluminate cement + superplasticizer (polycarboxylate) + carboxymethyl starch + Welan gum | CS, anisotropy, interlayer bonding, microstructure. | The 3D-printed samples and samples in a water environment had 20% and 15.1% lower CS, compared to air-cast samples. Samples 3D-printed in the air and underwater had different anisotropic variations. | [18] |
| 7 | Concrete with coarse aggregates + fibers | Evaluation of the mechanical properties of 3D-printed samples in air and underwater. | CS of the underwater samples was about 72% of that of the air samples. | [19] |
| No. | Area | Technology Readiness 1 | Reference(s) |
|---|---|---|---|
| 1 | Rapid prototyping of different components of underwater vehicles for ecological monitoring | Prototypes for scientific applications | [38] |
| 2 | Replicas of living organisms for hydrodynamic tests—for example, benthonic organisms and shark skin membranes | Models for investigation (prototypes) | [16] |
| 3 | Investigation of biomechanics, such as mimicking efficient natural swimmers (e.g., boxfish, seahorse) | Models for investigation (prototypes) | [16,76] |
| 4 | Coral reef restoration, including artificial reefs | Prototype underwater installations | [21,27] |
| 5 | Pressure housings | Laboratory tests for small elements, computer modeling | [50] |
| 6 | Repair of marine structures (underwater) | Laboratory tests for small elements, computer modeling | [49,50] |
| 7 | 3D-printed marine infrastructure (concrete) | Laboratory tests for small elements, computer modeling | [29] |
| 8 | Membranes for water treatment | Prototypes and small-scale solutions | [77,78] |
| 9 | Sensors—for example, 4D whisker sensors | Prototypes and small-scale solutions | [79] |
| 10 | Artificial muscles for stealthy undersea propulsion | Laboratory tests for small elements, computer modeling | [80] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Korniejenko, K.; Gądek, S.; Dynowski, P.; Tran, D.H.; Rudziewicz, M.; Pose, S.; Grab, T. Additive Manufacturing in Underwater Applications. Appl. Sci. 2024, 14, 1346. https://doi.org/10.3390/app14041346
Korniejenko K, Gądek S, Dynowski P, Tran DH, Rudziewicz M, Pose S, Grab T. Additive Manufacturing in Underwater Applications. Applied Sciences. 2024; 14(4):1346. https://doi.org/10.3390/app14041346
Chicago/Turabian StyleKorniejenko, Kinga, Szymon Gądek, Piotr Dynowski, Doan Hung Tran, Magdalena Rudziewicz, Sebastian Pose, and Thomas Grab. 2024. "Additive Manufacturing in Underwater Applications" Applied Sciences 14, no. 4: 1346. https://doi.org/10.3390/app14041346
APA StyleKorniejenko, K., Gądek, S., Dynowski, P., Tran, D. H., Rudziewicz, M., Pose, S., & Grab, T. (2024). Additive Manufacturing in Underwater Applications. Applied Sciences, 14(4), 1346. https://doi.org/10.3390/app14041346