
On Weighted Sum Rate of Multi-User Photon-Counting Multiple-Input Multiple-Output Visible Light Communication Systems under Poisson Shot Noise

Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
- This paper derives the expression for the weighted sum rate of an MU-PhC-MIMO VLC system based on the definition of mutual information. Additionally, it provides an approximate expression for the proposed system’s weighted sum rate under the minimized MUI, which is obtained utilizing a ZF approach.
- We propose a new optimization problem targeting the precoding matrix, aiming to maximize the weighted sum rate of the proposed MU-PhC-MIMO VLC system while minimizing MUI using the aforementioned ZF scheme.
- A novel sub-algorithm is developed to address the updated problem by employing variable substitution and successive convex approximation (SCA). After the analysis, this sub-algorithm is expected to converge to a robust solution that meets the Karush–Kuhn–Tucker (KKT) conditions. Afterward, by utilizing this sub-algorithm to traverse through all feasible scenarios, we can eventually obtain the optimal solution for the entire optimization problem.
- We also introduce a low-complexity alternative algorithm that achieves results close to those of the exhaustive algorithm. However, it significantly reduces discussions about possibilities, thereby reducing the algorithm’s complexity from exponential to polynomial levels.
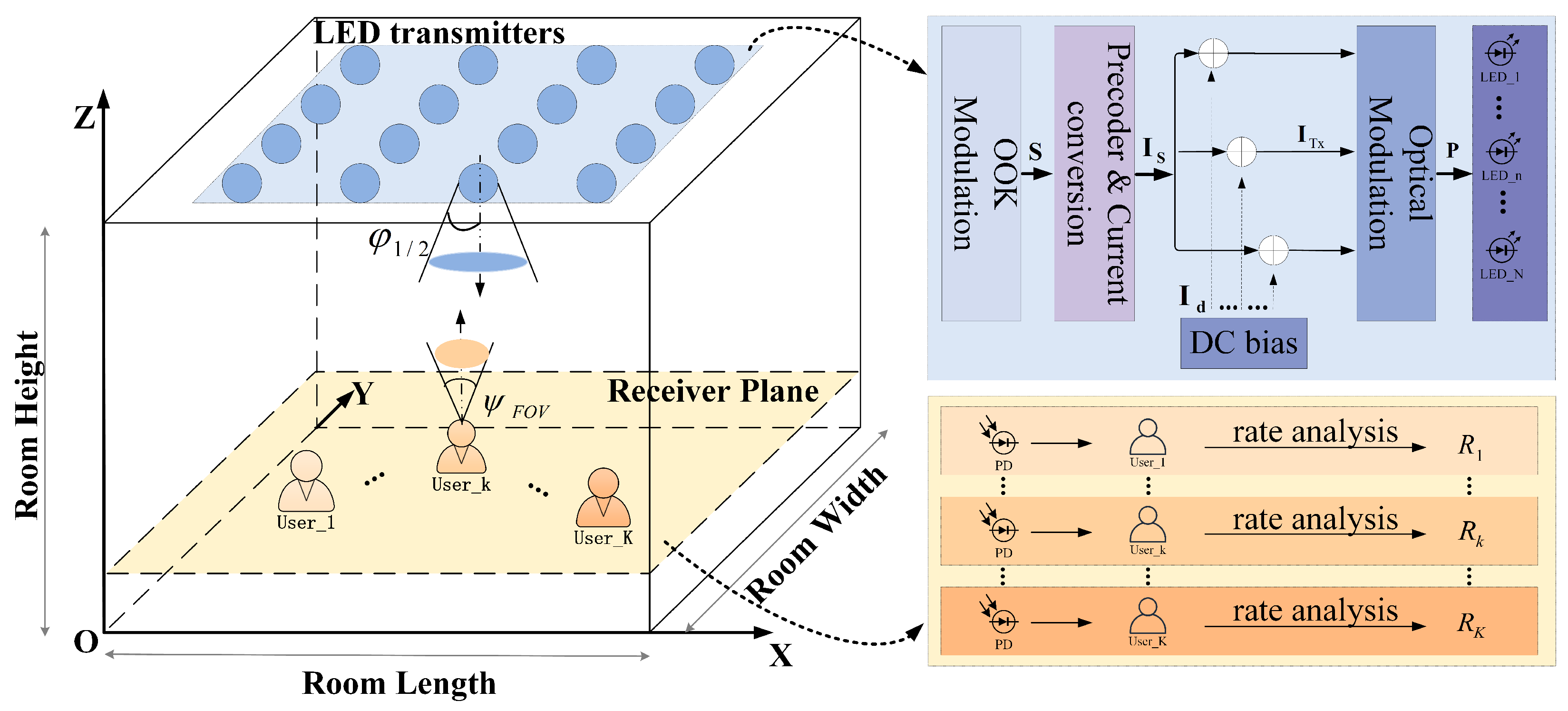
2. System Model and Assumptions
2.1. Transmitter
2.2. Channel Model
2.3. Receiver
3. Rate Analysis of MU-PhC-MIMO VLC Systems
3.1. Achievable Weighted Sum Rate
3.2. Approximate Expression Based on ZF Scheme
4. Maximization of Weighted Sum Rate Based on ZF Scheme
4.1. Problem Statement
4.2. SCA ZF-Based Precoding Design Solution
4.3. Algorithm Summary and Analysis
| Algorithm 1: SCA ZF-based algorithm for Problem P4 under the given . |
 |
| Algorithm 2: The proposed algorithm for Problem P1. |
 |
| Algorithm 3: The proposed low-complexity algorithm for Problem P1. |
 |
5. Numerical Results
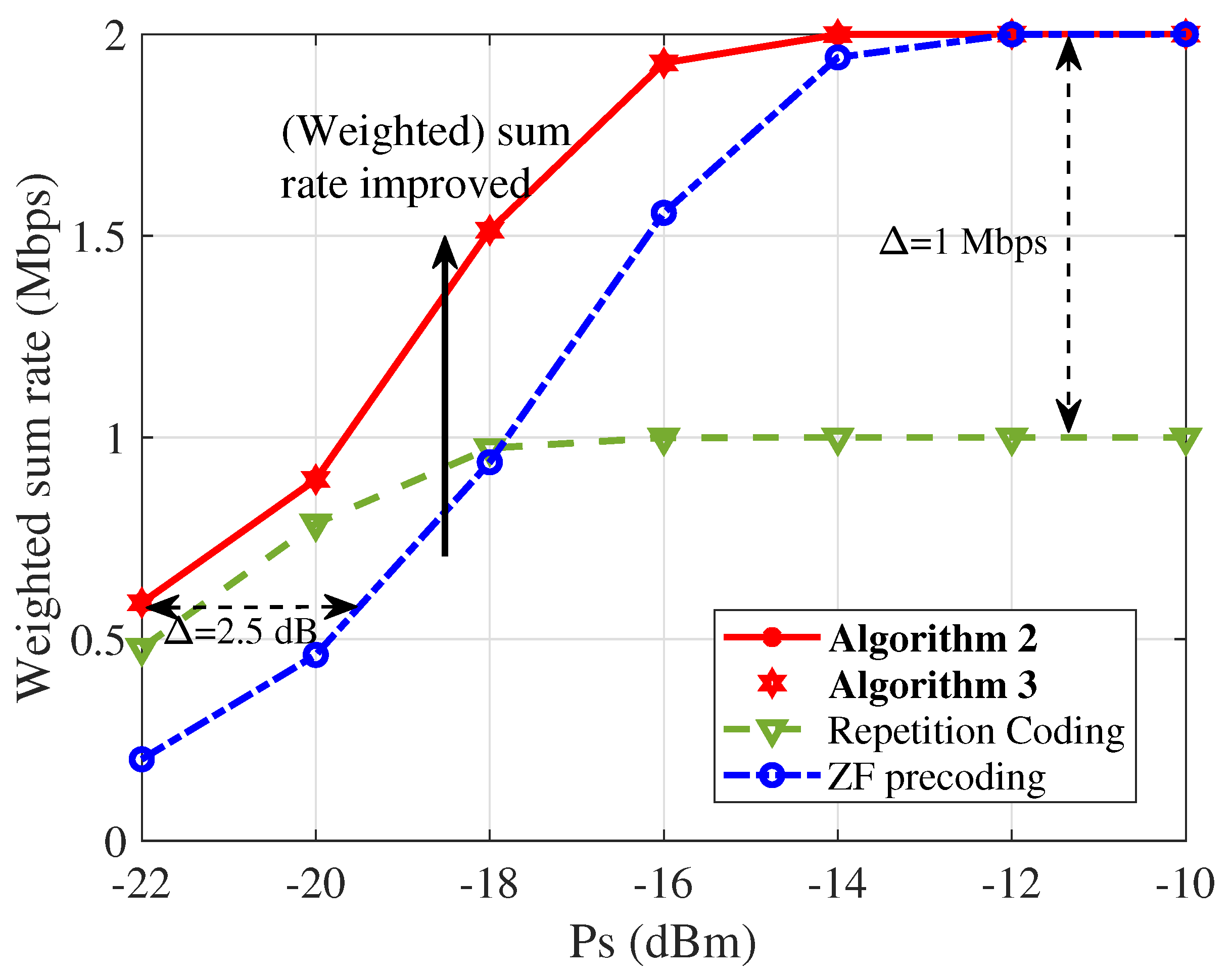
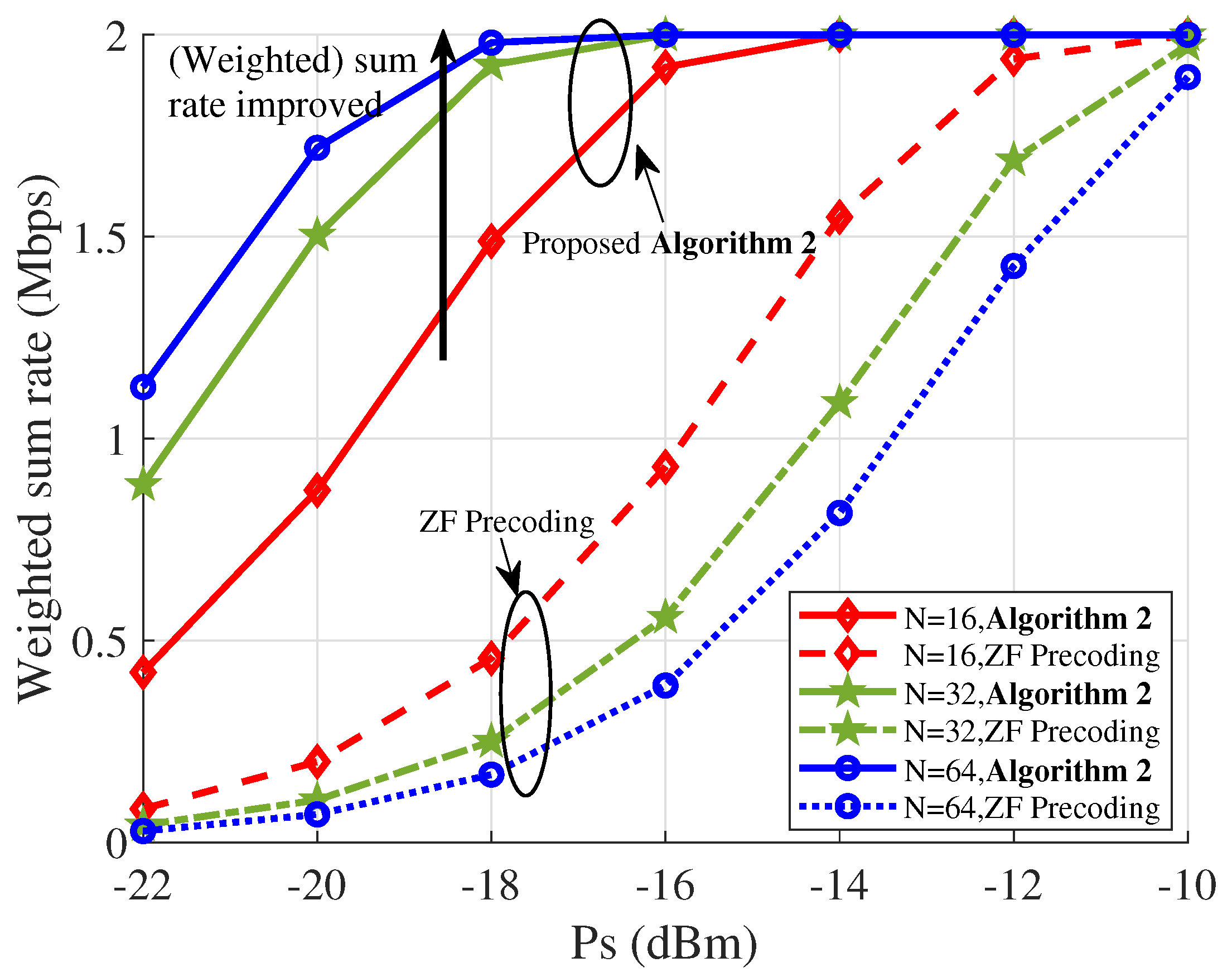
- ZF precoding [5]: We adopt the commonly used ZF precoding scheme under AWGN systems. The specific calculation method is as follows: and . We rigorously check that complies with the constraints C1–C4 in (16). If it does not meet the requirements, we normalize , i.e., . By substituting into (15), the corresponding (weighted) sum rate can be obtained.
- Repetition coding [39]: We select the user with the best channel condition and utilize all LED arrays to transmit single-stream data to that user. This configuration establishes a MIMO framework serving a single user.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 6G | Sixth generation |
| AWGN | Additive white Gaussian noise |
| CSI | Channel state information |
| DC | Direct current |
| FOV | Field of view |
| GA | Gaussian approximation |
| IM/DD | Intensity modulation/direct detection |
| KKT | Karush–Kuhn–Tucker |
| LED | Light-emitting diode |
| LHS | Left-hand side |
| LOS | Line of sight |
| MIMO | Multiple-input multiple-output |
| MUI | Multi-user interference |
| OOK | On-off keying |
| PCP | Poisson counting process |
| PD | Photodetector |
| Probability density function | |
| PhC | Photon counting |
| RF | Radio frequency |
| RHS | Right-hand side |
| SCA | Successive convex approximation |
| SPCA | Sequential parametric convex approximation |
| VLC | Visible light communication |
| ZF | Zero forcing |
Appendix A
- :According to [32], (A5) and (A6) exhibit the following set of inequality relationships:where the form of function is provided by (14). With all three parts of (A3) calculated separately, by substituting , , and (A7) into (A3), as well as substituting , , and (A8) into (A3), we can derive a set of inequality relationships as follows:Observing the inequalities above, when , the LHS and the RHS of (A9) tend toward the same value . Therefore, we can make a reasonable approximation:
- :Similarly, we can also obtain the following set of inequalities through analysis in this case and make a reasonable approximation:
Appendix B
References
- Wang, C.X.; Haider, F.; Gao, X.; You, X.H.; Yang, Y.; Yuan, D.; Hepsaydir, E. Cellular architecture and key technologies for 5G wireless communication networks. IEEE Commun. Mag. 2014, 52, 122–130. [Google Scholar] [CrossRef]
- Xu, Z.; Liu, W.; Wang, Z.; Hanzo, L. Petahertz communication: Harmonizing optical spectra for wireless communications. Digit. Commun. Netw. 2021, 7, 605–614. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, M.; Saad, W.; Hong, C.S.; Shikh-Bahaei, M. Energy efficient federated learning over wireless communication networks. IEEE Trans. Wirel. Commun. 2020, 20, 1935–1949. [Google Scholar] [CrossRef]
- Feng, R.; Kong, J.; Guo, X.; Jiang, W.; Xie, S. Joint precoding and power allocation in FSO channel with signal-dependent noise. Appl. Opt. 2023, 62, 6060–6071. [Google Scholar] [CrossRef]
- Ge, H.; Zhou, X.; Chen, Y.; Zhang, J.; Ni, W.; Wang, X.; Zheng, L. Shot-noise-limited photon-counting precoding scheme for MIMO ultraviolet communication in atmospheric turbulence. Opt. Express 2023, 31, 426–441. [Google Scholar] [CrossRef]
- Ahmadypour, N.; Gohari, A. Transmission of a bit over a discrete Poisson channel with memory. Digit. Commun. Netw. 2021, 67, 4710–4727. [Google Scholar]
- Zhang, J.Z.; Ke, K.; Ren, J. Multiuser robust transceiver design for indoor VLC with noisy channel state information. In Proceedings of the IEEE International Conference on Progress in Informatics and Computing (PIC), Shanghai, China, 18–20 December 2020; pp. 289–293. [Google Scholar]
- Ma, X.; Jin, X.; Deng, J.; Jin, M.; Gong, C.; Xu, Z. Symbol-level precoding for multiuser visible light communication. In Proceedings of the 11th International Conference on Wireless Communications and Signal Processing (WCSP), Xi’an, China, 23–25 October 2019; pp. 1–6. [Google Scholar]
- Guo, Y.; Xiong, K.; Lu, Y.; Gao, B.; Fan, P.; Letaief, K.B. SLIPT-enabled multi-LED MU-MISO VLC networks: Joint beamforming and DC bias optimization. IEEE Trans. Green Commun. Netw. 2023, 7, 1104–1120. [Google Scholar] [CrossRef]
- Shen, H.; Deng, Y.; Xu, W.; Zhao, C. Rate-maximized zero-forcing beamforming for VLC multiuser MISO downlinks. IEEE Photonics J. 2016, 8, 7901913. [Google Scholar] [CrossRef]
- Shen, H.; Xu, W.; Zhao, K.; Bai, F.; Zhao, C. Non-alternating globally optimal MMSE precoding for multiuser VLC downlinks. IEEE Commun. Lett. 2019, 23, 608–611. [Google Scholar] [CrossRef]
- Morales-Céspedes, M.; Haas, H.; Armada, A.G. Optimization of the receiving orientation angle for zero-forcing precoding in VLC. IEEE Commun. Lett. 2020, 25, 921–925. [Google Scholar] [CrossRef]
- Zhao, L.; Cai, K.; Jiang, M. Multiuser precoded MIMO visible light communication systems enabling spatial dimming. J. Light. Technol. 2020, 38, 5624–5634. [Google Scholar] [CrossRef]
- Ma, H.; Mostafa, A.; Lampe, L.; Hranilovic, S. Coordinated beamforming for downlink visible light communication networks. IEEE Trans. Commun. 2018, 66, 3571–3582. [Google Scholar] [CrossRef]
- Sifaou, H.; Kammoun, A.; Park, K.H.; Alouini, M.S. Robust transceivers design for multi-stream multi-user MIMO visible light communication. IEEE Access 2017, 5, 26387–26399. [Google Scholar] [CrossRef]
- Zhao, S.; Li, Q.; Tian, M. Capacity-maximized transmitter precoding for MU MIMO VLC systems with bounded channel uncertainties. IEEE Syst. J. 2020, 14, 5144–5147. [Google Scholar] [CrossRef]
- Wang, Z.Y.; Yu, H.Y.; Wang, D.M. Energy-efficient precoding design for multiuser MISO VLC systems based on joint detection. IEEE Access 2019, 7, 16274–16280. [Google Scholar] [CrossRef]
- Yu, Z.; Baxley, R.J.; Zhou, G.T. Multi-user MISO broadcasting for indoor visible light communication. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; pp. 4849–4853. [Google Scholar]
- Kim, J.H.; Olson, A.; Govindasamy, S.; Rahaim, M.B. An approach for Tomlinson-Harashima precoding in visible-light-communications systems. In Proceedings of the International Conference on Computer, Information and Telecommunication Systems (CITS), Colmar, France, 11–13 July 2018; pp. 1–5. [Google Scholar]
- Wang, C.; Yang, Y.; Yang, Z.; Feng, C.; Cheng, J.; Guo, C. Joint SIC-based precoding and sub-connected architecture design for MIMO VLC systems. IEEE Trans. Commun. 2022, 71, 1044–1058. [Google Scholar] [CrossRef]
- Feng, Z.; Guo, C.; Ghassemlooy, Z.; Yang, Y. The spatial dimming scheme for the MU-MIMO-OFDM VLC system. IEEE Photonics J. 2018, 10, 7907013. [Google Scholar] [CrossRef]
- Wang, Q.; Wang, Z.; Dai, L. Multiuser MIMO-OFDM for visible light communications. IEEE Photonics J. 2015, 7, 7904911. [Google Scholar] [CrossRef]
- Arya, S.; Chung, Y.H. State-of-the-art ultraviolet multiuser indoor communication over power-constrained discrete-time Poisson channels. Opt. Eng. 2020, 59, 106106. [Google Scholar] [CrossRef]
- Arfaoui, M.A.; Ghrayeb, A.; Assi, C.M. Secrecy performance of multi-user MISO VLC broadcast channels with confidential messages. IEEE Trans. Wirel. Commun. 2018, 17, 7789–7800. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, C.; Feng, C.; Guo, C.; Cheng, J.; Zeng, Z. A generalized dimming control scheme for visible light communications. IEEE Trans. Commun. 2021, 69, 1845–1857. [Google Scholar] [CrossRef]
- Keskin, M.F.; Sezer, A.D.; Gezici, S. Localization via visible light systems. Proc. IEEE Inst. Electr. Electron. Eng. 2018, 106, 1063–1088. [Google Scholar] [CrossRef]
- Gong, C.; Xu, Z. Channel estimation and signal detection for optical wireless scattering communication with inter-symbol interference. IEEE Trans. Wirel. Commun. 2015, 14, 5326–5337. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, M. Adaptive statistical Bayesian MMSE channel estimation for visible light communication. IEEE Trans. Signal Process. 2016, 65, 1287–1299. [Google Scholar] [CrossRef]
- Yesilkaya, A.; Karatalay, O.; Ogrenci, A.S.; Panayirci, E. Channel estimation for visible light communications using neural networks. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Vancouver, BC, Canada, 24–29 July 2016; pp. 320–325. [Google Scholar]
- Fray, S.; Johnson, F.A.; Jones, R.; McLean, T.P.; Pike, E.R. Photon-counting distributions of modulated laser beams. Phys. Rev. 1967, 153, 357–359. [Google Scholar] [CrossRef]
- Chen, Y.; Zhou, X.; Ni, W.; Hossain, E.; Wang, X. Optimal power allocation for multiuser photon-counting underwater optical wireless communications under poisson shot noise. IEEE Trans. Commun. 2023, 71, 2230–2245. [Google Scholar] [CrossRef]
- Grant, M.; Boyd, S. CVX: MATLAB Software for Disciplined Convex Programming, Version 2.2. Available online: http://cvxr.com/cvx (accessed on 1 January 2020).
- Marks, B.R.; Wright, G.P. A general inner approximation algorithm for nonconvex mathematical programs. Oper. Res. 1978, 26, 681–683. [Google Scholar] [CrossRef]
- Sun, C.; Ni, W.; Bu, Z.; Wang, X. Energy minimization for intelligent reflecting surface-assisted mobile edge computing. IEEE Trans. Wirel. Commun. 2022, 21, 6329–6344. [Google Scholar] [CrossRef]
- Arfaoui, M.A.; Zaid, H.; Rezki, Z.; Ghrayeb, A.; Chaaban, A.; Alouini, M.S. Artificial noise-based beamforming for the MISO VLC wiretap channel. IEEE Trans. Commun. 2018, 67, 2866–2879. [Google Scholar] [CrossRef]
- Mostafa, A.; Lampe, L. Optimal and robust beamforming for secure transmission in MISO visible-light communication links. IEEE Trans. Signal Process. 2016, 64, 6501–6516. [Google Scholar] [CrossRef]
- Han, D.; Lee, K. Ambient light noise filtering technique for multimedia high speed transmission system in MIMO-VLC. Multimed. Tools. Appl. 2021, 80, 34751–34765. [Google Scholar] [CrossRef]
- Alhadiid, G.G.; Astuti, R.P.; Hidayat, B.; Darlis, D. Indoor visible light communication system with diversity combining and repetition code. In Proceedings of the IEEE International Conference on Signals and Systems (ICSigSys), Bandung, Indonesia, 16–18 July 2019; pp. 138–142. [Google Scholar]
- Leemis, L.M.; McQueston, J.T. Univariate distribution relationships. Am. Stat. 2008, 62, 45–53. [Google Scholar] [CrossRef]
- Biswas, S.; Ghassemlooy, Z.; Le-Minh, H.; Chattopadhyay, S.; Tang, X.; Lin, B. On application of a positioning system using photosensors with user mobility support in HealthCare system. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2023, 93, 121–133. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Visible light wavelength (v) | 450 nm |
| Symbol duration () | 1 s |
| The receiving area of the PD () | 1 cm2 |
| PD field of view () | 60° |
| LED semi-angle () | 60° |
| Optical filter gain | 1 |
| Refractive index (o) | 1.5 |
| Quantum efficiency () | 0.54 |
| Background radiation power per slot () | −75 dBm [38] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhou, X.; Wang, J.; Dong, Z.; Chen, Y. On Weighted Sum Rate of Multi-User Photon-Counting Multiple-Input Multiple-Output Visible Light Communication Systems under Poisson Shot Noise. Appl. Sci. 2024, 14, 1423. https://doi.org/10.3390/app14041423
Chen Y, Zhou X, Wang J, Dong Z, Chen Y. On Weighted Sum Rate of Multi-User Photon-Counting Multiple-Input Multiple-Output Visible Light Communication Systems under Poisson Shot Noise. Applied Sciences. 2024; 14(4):1423. https://doi.org/10.3390/app14041423
Chicago/Turabian StyleChen, Ying, Xiaolin Zhou, Jian Wang, Zhichao Dong, and Yongkang Chen. 2024. "On Weighted Sum Rate of Multi-User Photon-Counting Multiple-Input Multiple-Output Visible Light Communication Systems under Poisson Shot Noise" Applied Sciences 14, no. 4: 1423. https://doi.org/10.3390/app14041423
APA StyleChen, Y., Zhou, X., Wang, J., Dong, Z., & Chen, Y. (2024). On Weighted Sum Rate of Multi-User Photon-Counting Multiple-Input Multiple-Output Visible Light Communication Systems under Poisson Shot Noise. Applied Sciences, 14(4), 1423. https://doi.org/10.3390/app14041423