
A Phase Correction Model for Fourier Transform Spectroscopy

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Phase Correction by the Mertz Method
3. Phase Correlation Method
4. All-Pass Filter and PCM-APF Model
4.1. Digital All-Pass Filter
4.2. The PCM-APF Model
4.3. Filter Parameter Optimization Strategy
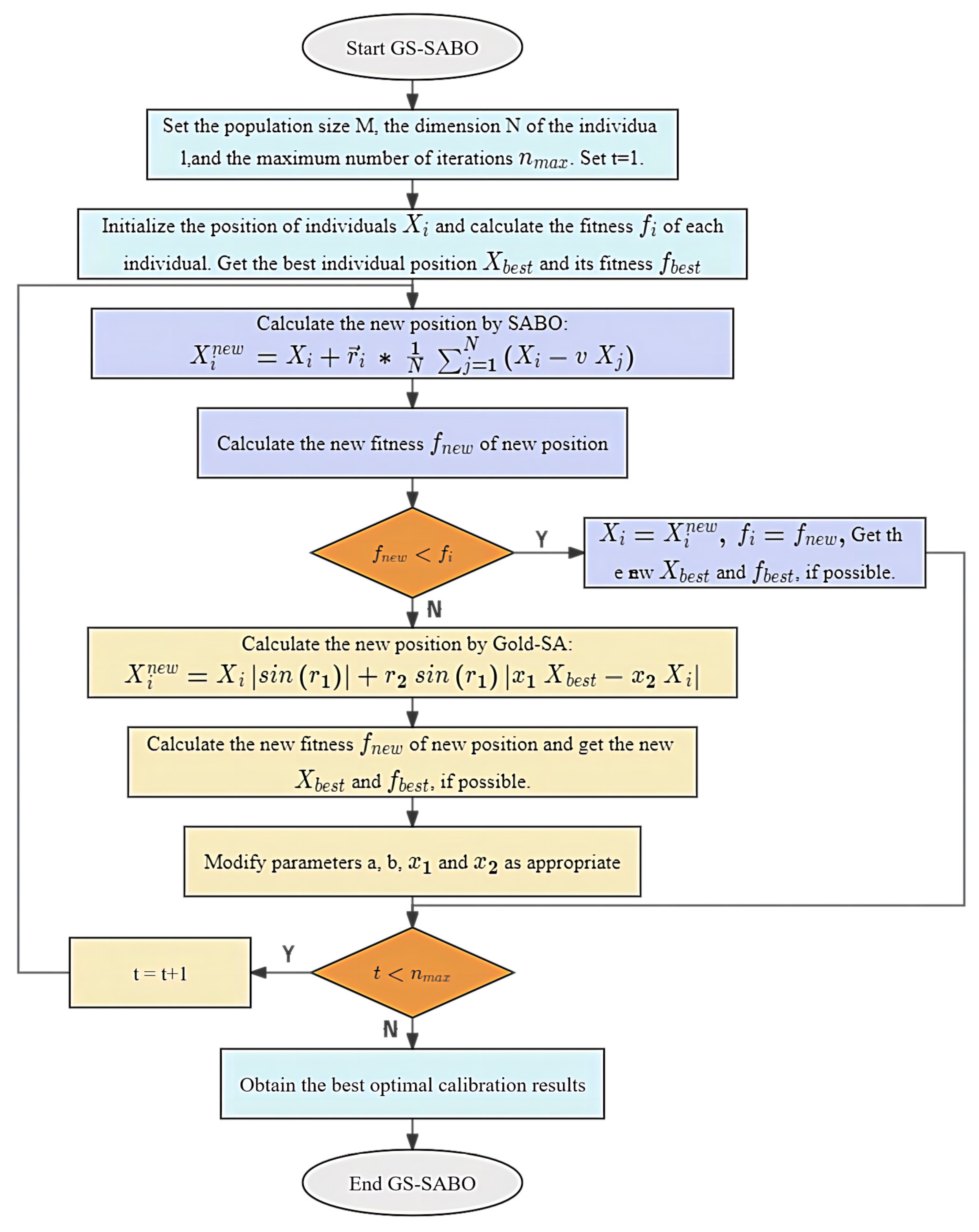
4.3.1. SABO Algorithm
4.3.2. Population Initialization and Improvement Scheme
4.3.3. Gold-SA and the GS-SABO Algorithm
4.3.4. All-Pass Filter Parameter Optimization Steps
5. Simulation Experiment
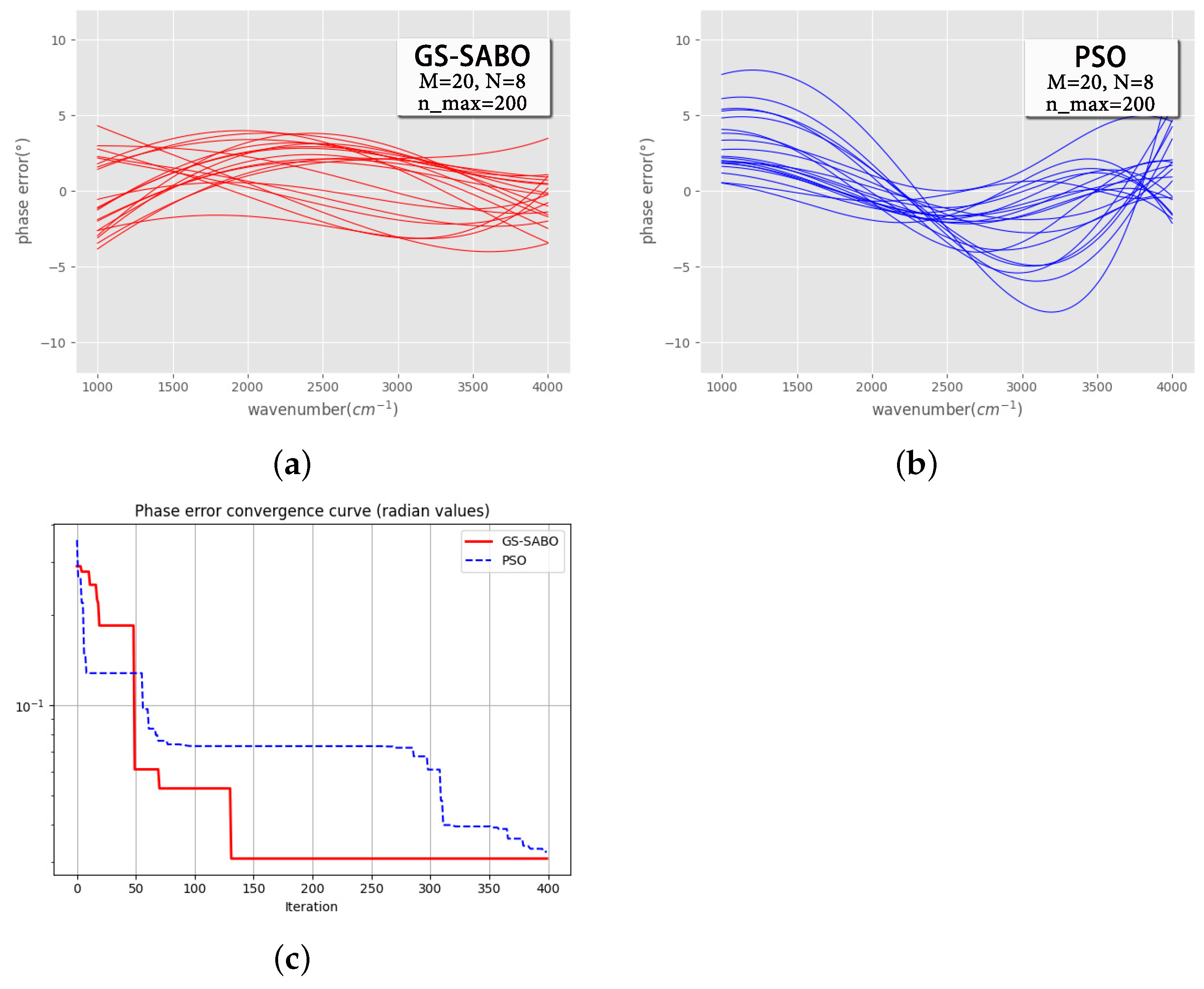
5.1. Filter Optimization Algorithm Performance Comparison
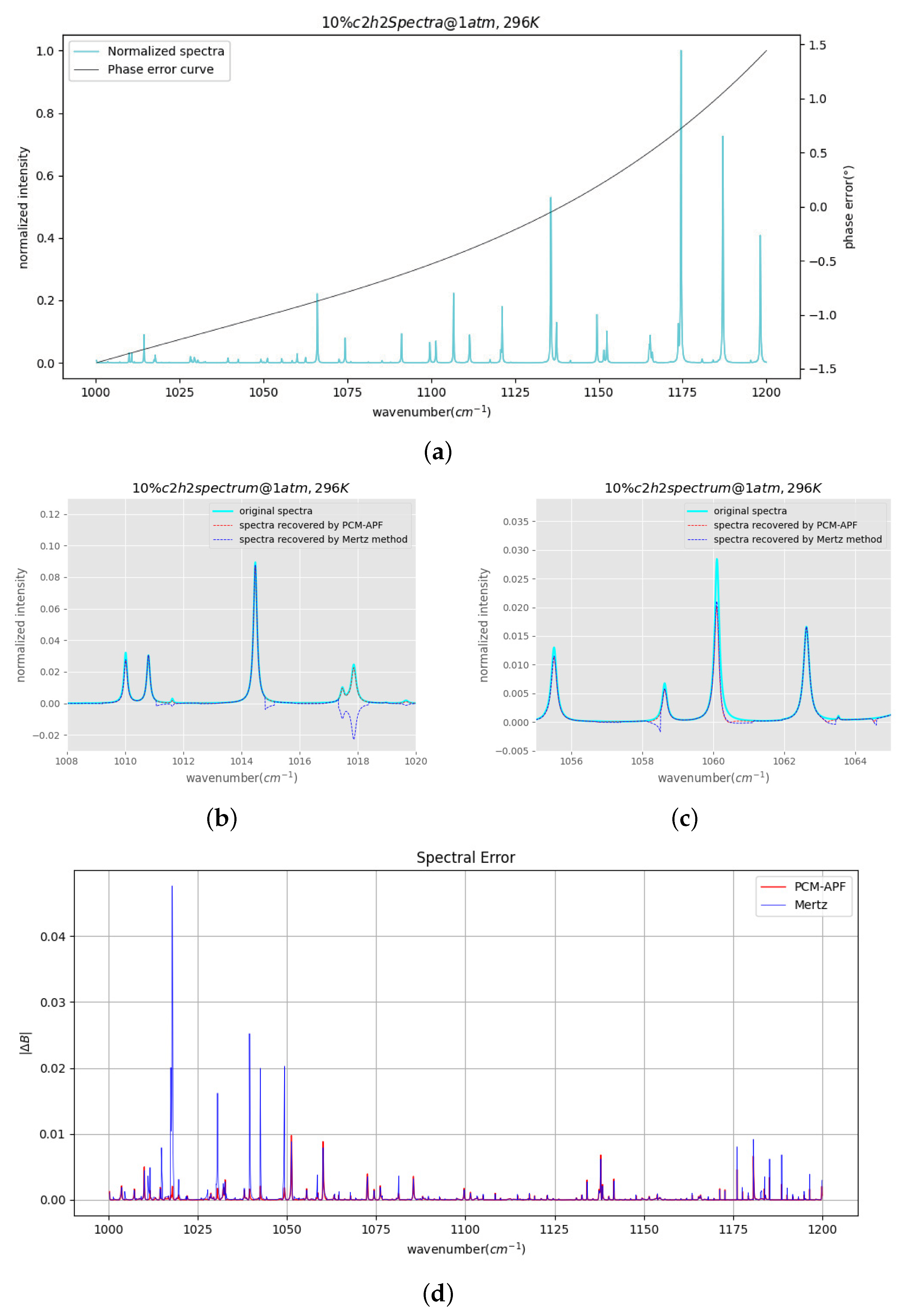
5.2. Experiments for PCM-APF Model
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fomina, P.S.; Proskurnin, M.A.; Mizaikoff, B.; Volkov, D.S. Infrared Spectroscopy in Aqueous Solutions: Capabilities and Challenges. Crit. Rev. Anal. Chem. 2023, 53, 1748–1765. [Google Scholar] [CrossRef] [PubMed]
- Bai, C.; Li, J.; Wang, G.; Lu, C.; Zhang, H.; Zhao, Y.; Zhang, W.; Fu, S. Dual-shearing interferometer for multi-modal hyperspectral imaging. Opt. Lett. 2023, 48, 2214–2217. [Google Scholar] [CrossRef] [PubMed]
- Picqué, N.; Hänsch, T.W. Frequency comb spectroscopy. Nat. Photonics 2019, 13, 146–157. [Google Scholar] [CrossRef]
- Ventura, G.D.; Marcelli, A.; Bellatreccia, F. SR-FTIR Microscopy and FTIR Imaging in the Earth Sciences. Rev. Mineral. Geochem. 2014, 78, 447–479. [Google Scholar] [CrossRef]
- Hashimoto, K.; Nakamura, T.; Kageyama, T.; Badarla, V.R.; Shimada, H.; Horisaki, R.; Ideguchi, T. Upconversion time-stretch infrared spectroscopy. Light Sci. Appl. 2023, 12, 465–474. [Google Scholar] [CrossRef] [PubMed]
- David, A.; Ifarraguerri, A. Computation of a spectrum from a single-beam Fourier-transform infrared interferogram. Appl. Opt. 2002, 41, 1181–1189. [Google Scholar] [CrossRef] [PubMed]
- Forman, M.L.; Steel, W.H.; Vanasse, G.A. Correction of asymmetric interferograms obtained in Fourier spectroscopy. J. Opt. Soc. Am. 1966, 56, 59–63. [Google Scholar] [CrossRef]
- Mertz, L. Correction of phase errors in interferograms. Appl. Opt. 1963, 2, 1332. [Google Scholar] [CrossRef]
- Griffiths, P.R.; Haseth, J.A.D. Fourier Transform Infrared Spectroscopy, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2007; pp. 30–41. [Google Scholar]
- Saptari, V. Fourier Transform Spectroscopy Instrumentation Engineering; SPIE Optical Engineering Press: Bellingham, WA, USA, 2003; pp. 32–34. [Google Scholar]
- Wang, C.L.; Li, Y.S.; Liu, X.B.; Hu, B.L.; Liu, C.F. Detection and Correction of Linear Phase Error for Fourier Transform Spectrometer Using Phase Correction Method. Adv. Mater. Res. 2011, 225–226, 293–296. [Google Scholar] [CrossRef]
- Furstenberg, R.; White, J.O. Phase Correction of Interferograms Using Digital All-Pass Filters. Appl. Spectrosc. 2005, 59, 316–321. [Google Scholar] [CrossRef]
- Wu, X.; Liu, Z.; Li, H. A new model for the phase correction of interferograms. Anal. Methods 2015, 7, 2399–2405. [Google Scholar] [CrossRef]
- Furstenberg, R.; White, J.O. Error-free phase correction of interferograms using digital all-pass filters. Vib. Spectrosc. 2006, 42, 226–230. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Subtraction-Average-Based Optimizer: A New Swarm-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2023, 11, 149. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, G. Golden Sine Algorithm: A Novel Math-Inspired Algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Liu, Y.; Zhao, Y.C.; Geng, X.R.; Tang, H.R.; Ding, C.B. Analysis of the Phase Error Non-Linearity of FTS and Discussion about Mertz Method. Spectrosc. Spectr. Anal. 2009, 29, 1809–1812. [Google Scholar]
- Huke, P.; Debus, M.; Reiners, A. Phase-correction algorithm for Fourier transform spectroscopy of a laser frequency comb. J. Opt. Soc. Am. B 2019, 36, 1260–1266. [Google Scholar] [CrossRef]
- Fulton, T.; Naylor, D. Fourier Transform Spectroscopy and Hyperspectral Imaging and Sounding of the Environment. In Proceedings of the Fourier Transform Spectroscopy and Hyperspectral Imaging and Sounding of the Environment, Lake Arrowhead, CA, USA, 1–4 March 2015. [Google Scholar]
- Zhang, P.; Zhang, Z. Rapidly changing phase error correction of Fourier transform spectrometer. Chin. J. Lasers 2012, 39, 115002. [Google Scholar]
- Zhang, X.D. Modern Signal Processing; De Gruyter: Berlin, Germany; Boston, MA, USA, 2023; pp. 300–328. [Google Scholar]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Nagashima, S.; Aoki, T. A Subpixel Image Matching Technique Using Phase-Only Correlation. In Proceedings of the 2006 International Symposium on Intelligent Signal Processing and Communications, Yonago, Japan, 12–15 December 2006. [Google Scholar] [CrossRef]
- Zhang, Q.Q.; Zhang, L.H. An improved delay algorithm based on generalized cross correlation. In Proceedings of the 2017 IEEE 3rd Information Technology and Mechatronics Engineering Conference (ITOEC), Chongqing, China, 3–5 October 2017. [Google Scholar] [CrossRef]
- Shami, T.M.; El-Saleh, A.A.; Alswaitti, M.; Al-Tashi, Q.; Summakieh, M.A.; Mirjalili, S. Particle Swarm Optimization: A Comprehensive Survey. IEEE Access 2022, 10, 10031–10061. [Google Scholar] [CrossRef]
- Wang, Y.; Dang, C. An Evolutionary Algorithm for Global Optimization Based on Level-Set Evolution and Latin Squares. IEEE Trans. Evol. Comput. 2007, 11, 579–595. [Google Scholar] [CrossRef]
- Rani, G.S.; Jayan, S.; Alatas, B. Analysis of Chaotic Maps for Global Optimization and a Hybrid Chaotic Pattern Search Algorithm for Optimizing the Reliability of a Bank. IEEE Access 2023, 11, 24497–24510. [Google Scholar] [CrossRef]
- Yu, Y.; Gao, S.; Cheng, S.; Wang, Y.; Song, S.; Yuan, F. CBSO: A memetic brain storm optimization with chaotic local search. Memetic Comput. 2018, 10, 353–367. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-Based Learning: A New Scheme for Machine Intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce (CIMCA-IAWTIC’06), Sydney, NSW, Australia, 29 November–1 December 2006. [Google Scholar] [CrossRef]
- Kochanov, R.V.; Gordon, I.E.; Rothman, L.S.; Wcisło, P.; Hill, C.; Wilzewski, J.S. HITRAN Application Programming Interface (HAPI): A comprehensive approach to working with spectroscopic data. J. Quant. Spectrosc. Radiat. Transf. 2016, 177, 15–30. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, H.; Shen, H.; Meng, L.; Ben, C.; Jia, P. A Phase Correction Model for Fourier Transform Spectroscopy. Appl. Sci. 2024, 14, 1838. https://doi.org/10.3390/app14051838
Cheng H, Shen H, Meng L, Ben C, Jia P. A Phase Correction Model for Fourier Transform Spectroscopy. Applied Sciences. 2024; 14(5):1838. https://doi.org/10.3390/app14051838
Chicago/Turabian StyleCheng, Huishi, Honghai Shen, Lingtong Meng, Chenzhao Ben, and Ping Jia. 2024. "A Phase Correction Model for Fourier Transform Spectroscopy" Applied Sciences 14, no. 5: 1838. https://doi.org/10.3390/app14051838
APA StyleCheng, H., Shen, H., Meng, L., Ben, C., & Jia, P. (2024). A Phase Correction Model for Fourier Transform Spectroscopy. Applied Sciences, 14(5), 1838. https://doi.org/10.3390/app14051838