
Improved Bootstrap Method Based on RBF Neural Network for Reliability Assessment

Abstract
:1. Introduction
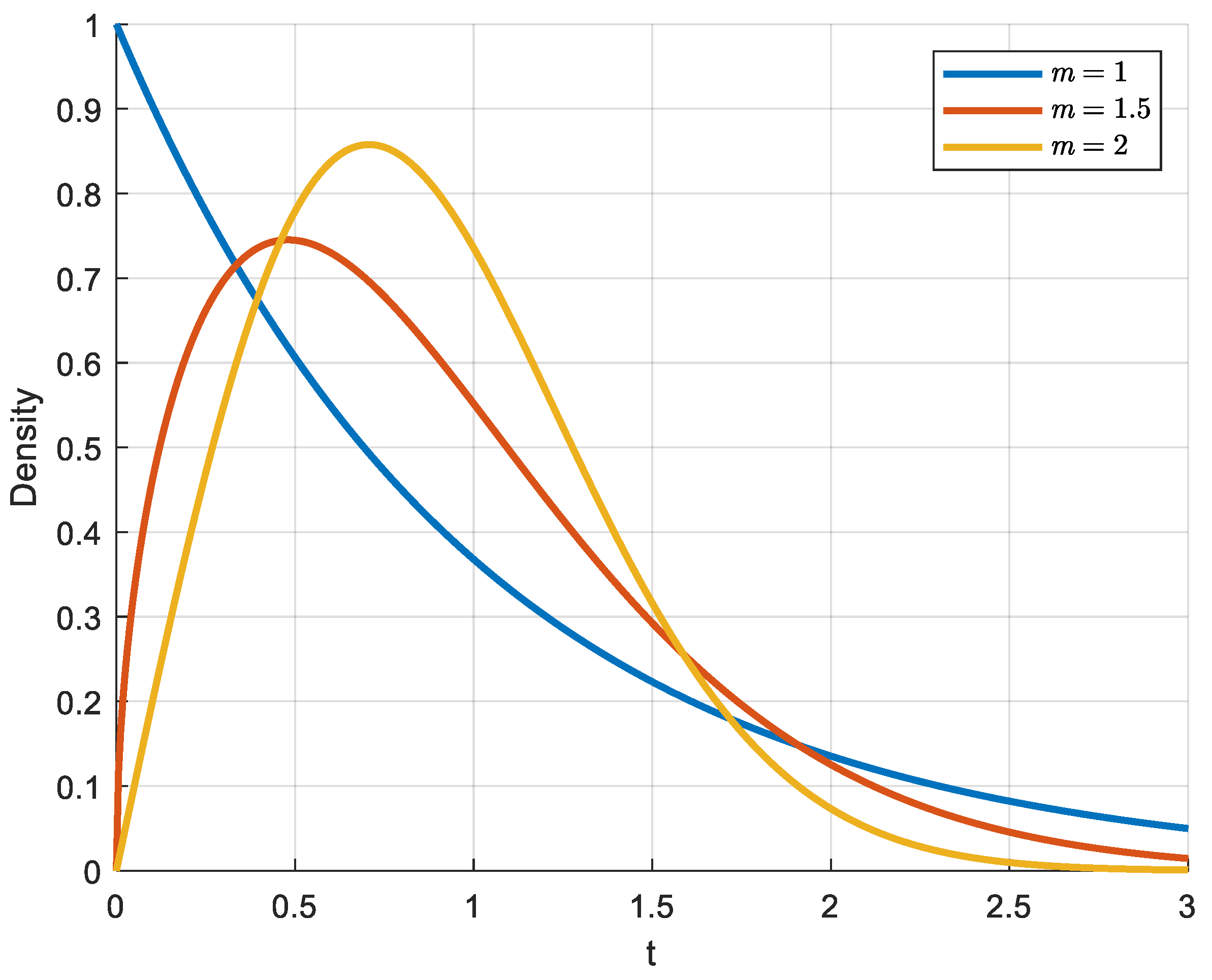
2. Weibull Distribution
3. Bootstrap Methodology and Its Improvement
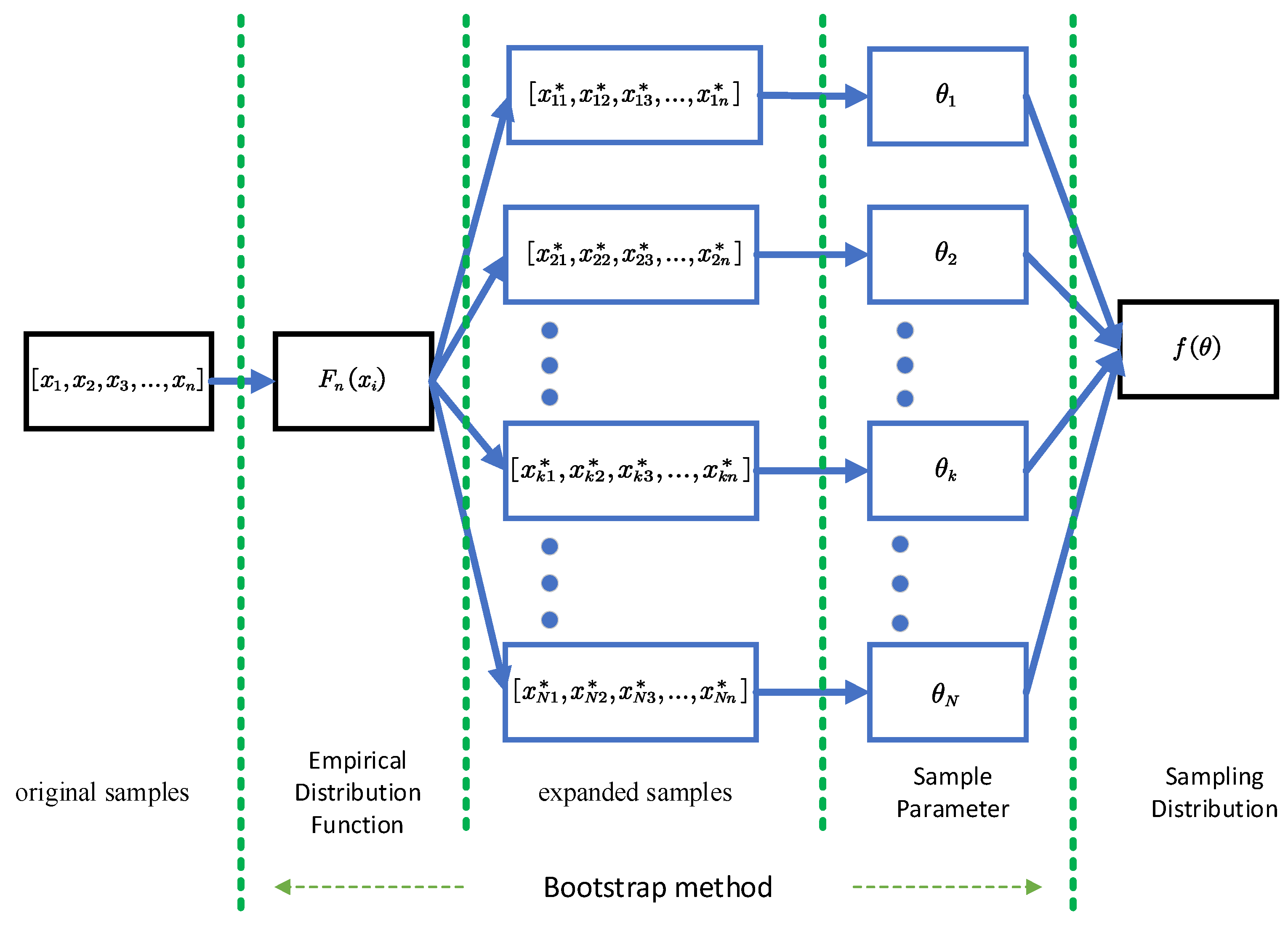
3.1. Bootstrap Approach
- Uniformly distributed pseudo-random numbers in the interval [0, 1] are generated;
- Let , where is rounded down;
- Let , where is the desired random sample.
3.2. Modified Exponential Sample Empirical Function
- A linear empirical distribution function is introduced for each segment before samples, where is the total number of samples, and is the number of tail samples.
- The samples after are fitted using an exponential distribution with the same mean as the original sample. Considering integer values below five for results in a smaller variance in the right tail fit [22]. The modified empirical distribution function for the samples iswhere . The simulation-based method for generating random samples that obey the modified empirical distribution function involves the following steps:
- Uniformly distributed pseudo-random numbers in the interval [0, 1] are generated;
- If , then is the desired random number; otherwise, go to step (3);
- Let , and ; then,is the desired random number.
3.3. Simulation Verification
4. Improved Bootstrap Data Expansion Methodology Based on RBF Neural Network and Reliability Assessment
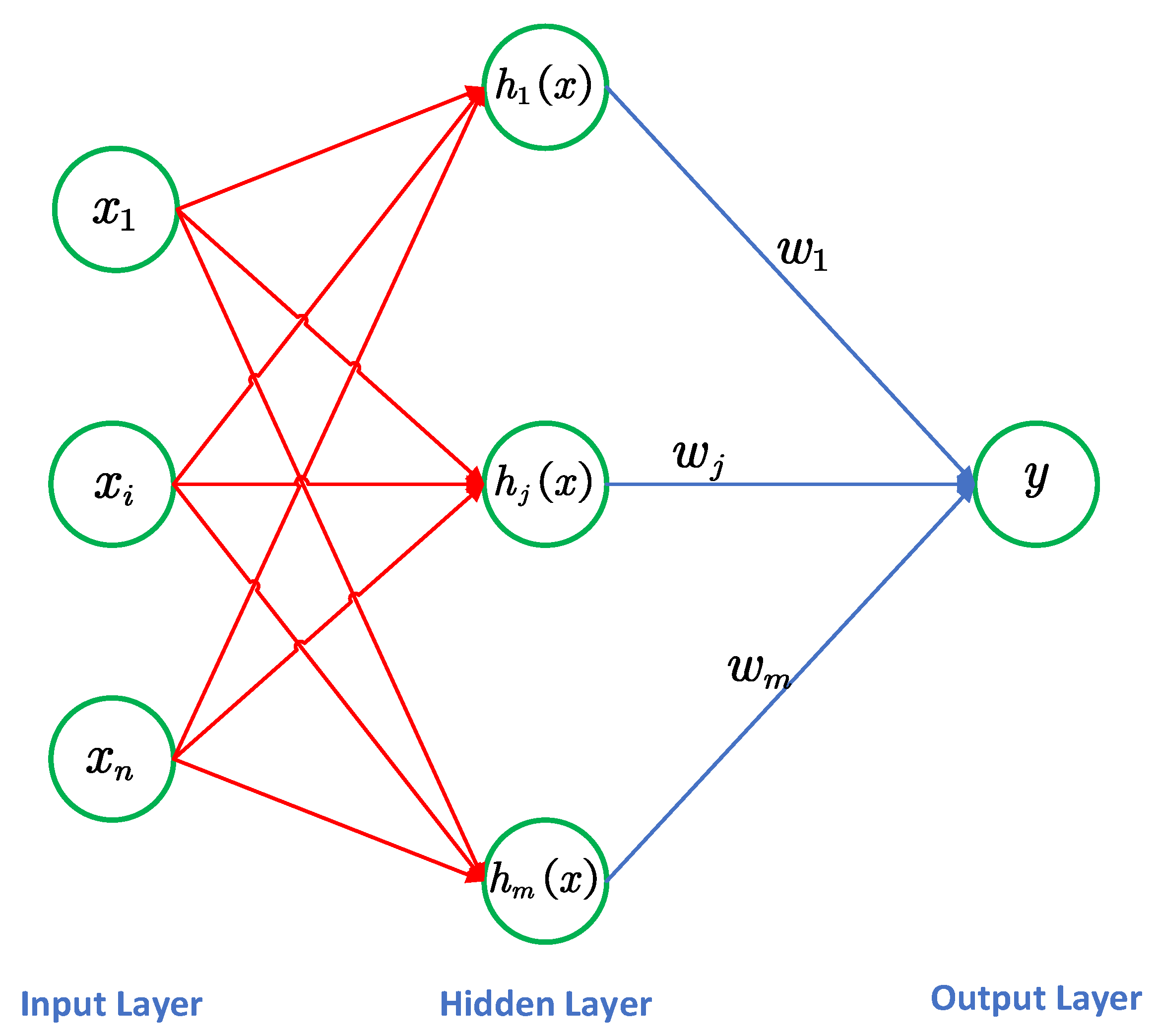
4.1. RBF Neural Network
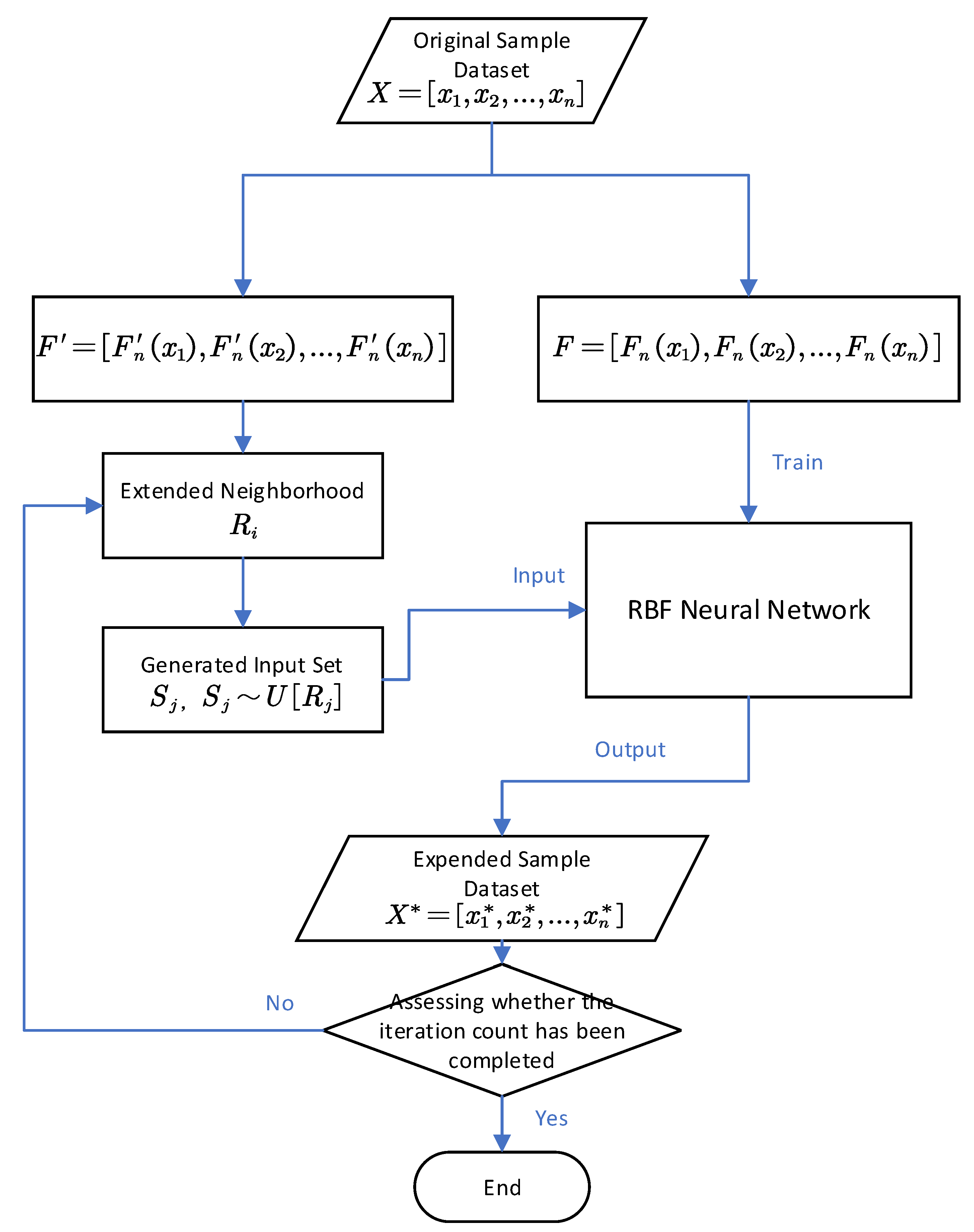
4.2. Improved Bootstrap Data Expansion Method Based on RBF Neural Network
- The original samples are sorted in descending order to obtain the order statistic of the sample , where , …, . Substituting into Equation (5) yields the set of empirical distribution values of , .
- RBF neural network training: The RBF neural network is trained by considering as the input and as the output of the network . The Gaussian radial basis function is used in the network, as shown in Equation (8).
- The neighborhood function of the set of empirical distributions is introduced. The input set of the RBF neural network is then obtained, and is substituted into Equation (6) to obtain the set of -corrected empirical distribution values . Let , and the neighborhood function bewhere is the neighborhood parameter (). The input set of the RBF neural network is generated sequentially from the uniform distribution of each neighborhood , where .
- The input set is fed into the RBF neural network to obtain the expanded sample . The elements of are input into the RBF neural network sequentially. When the input is , the output isThe set consisting of the RBF neural network outputs is the augmented sample of .
- Steps (3) and (4) are repeated times to obtain the expanded sample of .
4.3. Assessment of Reliability Indicators
5. Example Analysis
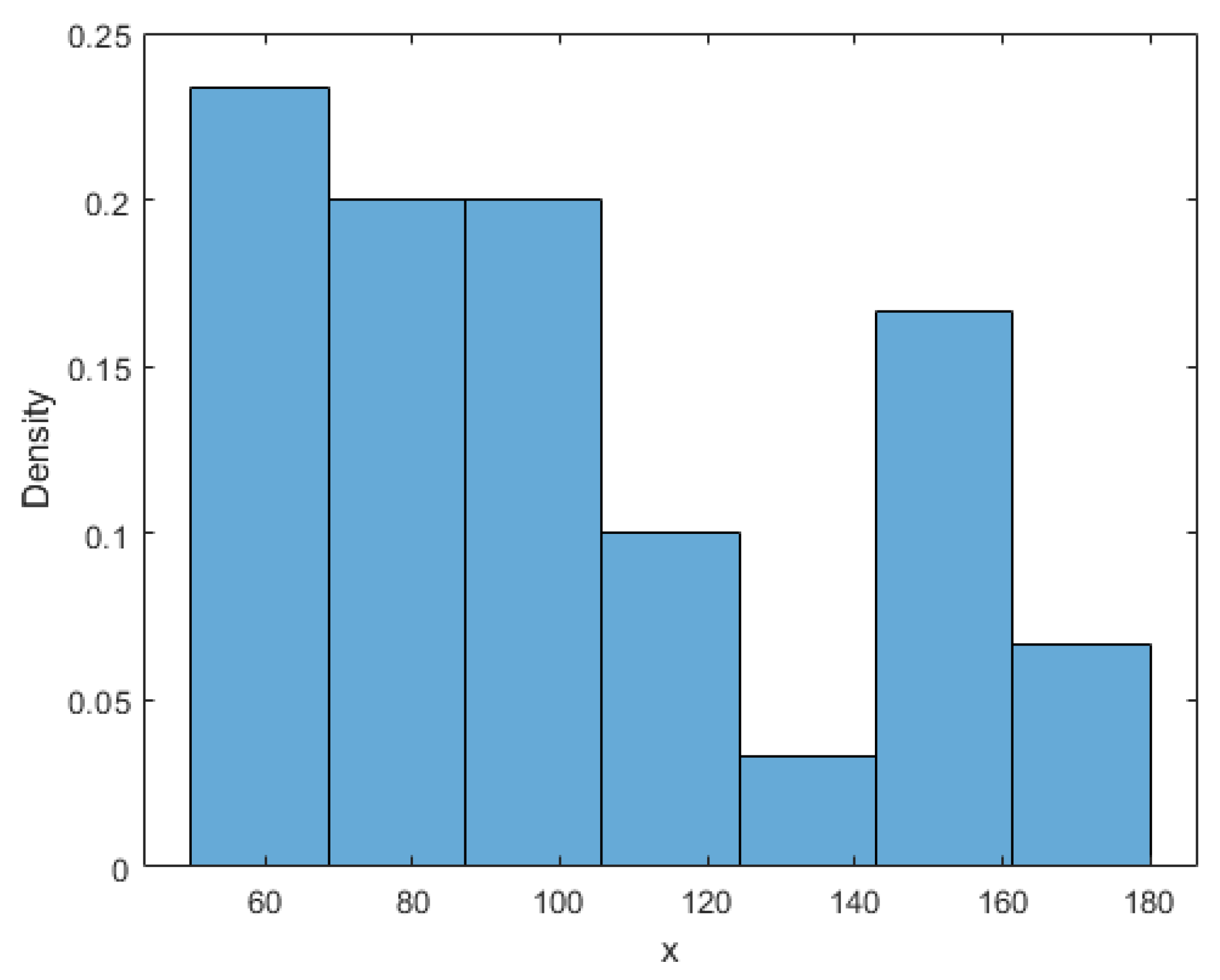
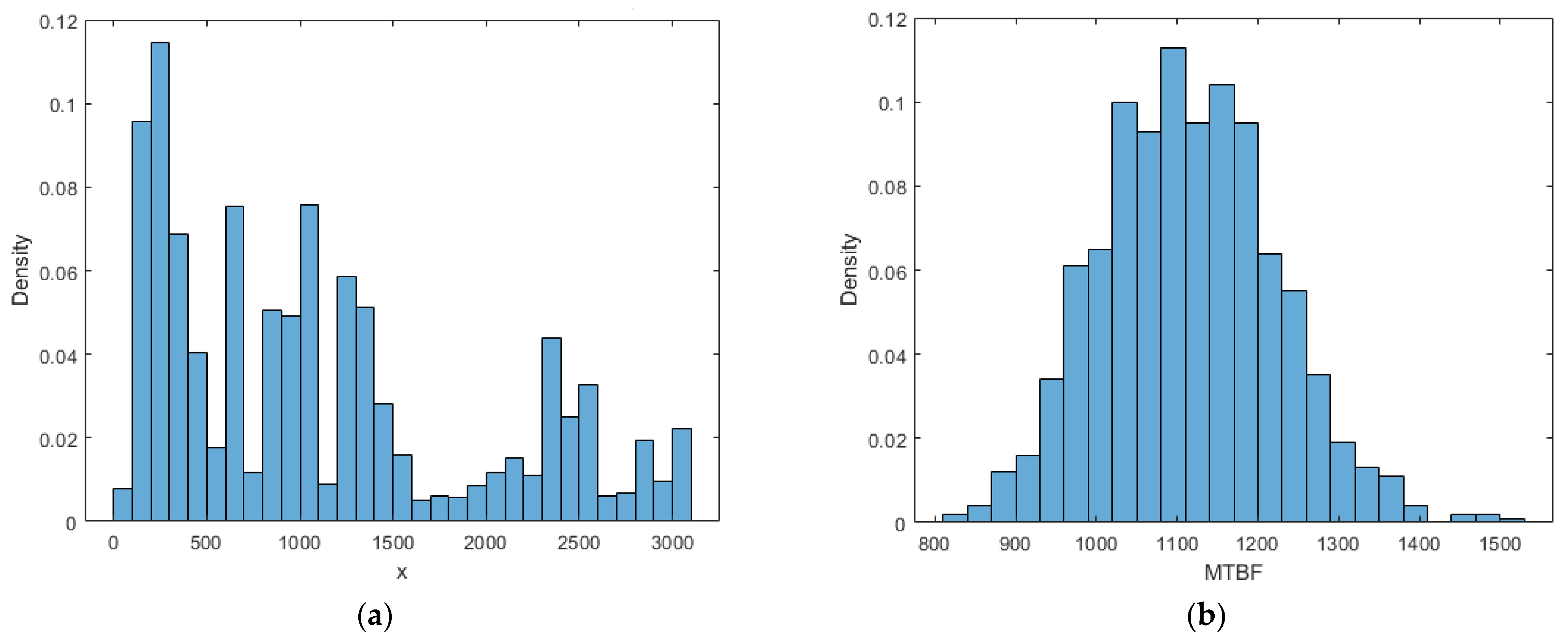
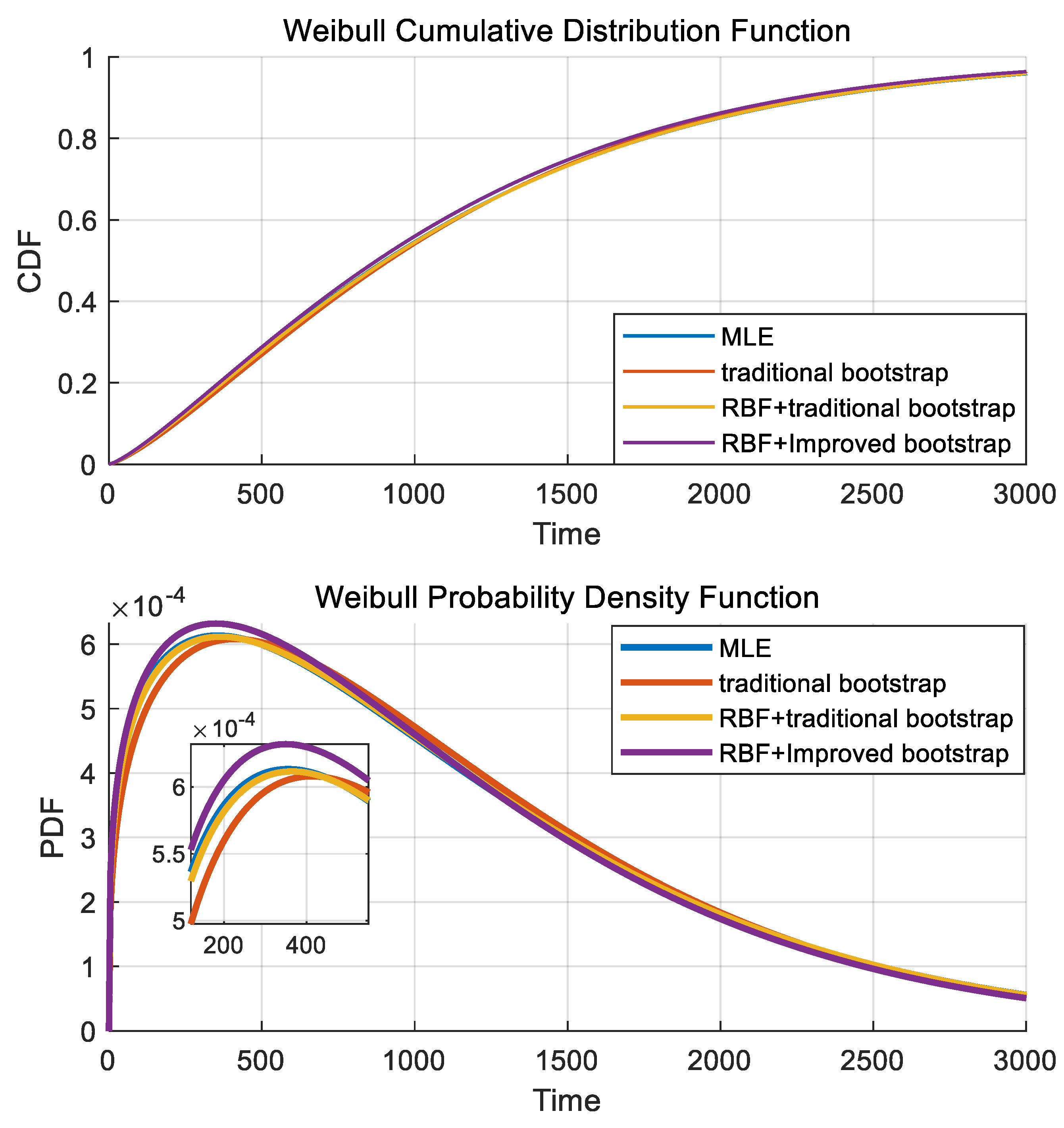
- Using the maximum likelihood estimation to estimate the parameters of the Weibull distribution for the original data yields and , and the reliability function is as follows:Then, MTBF is
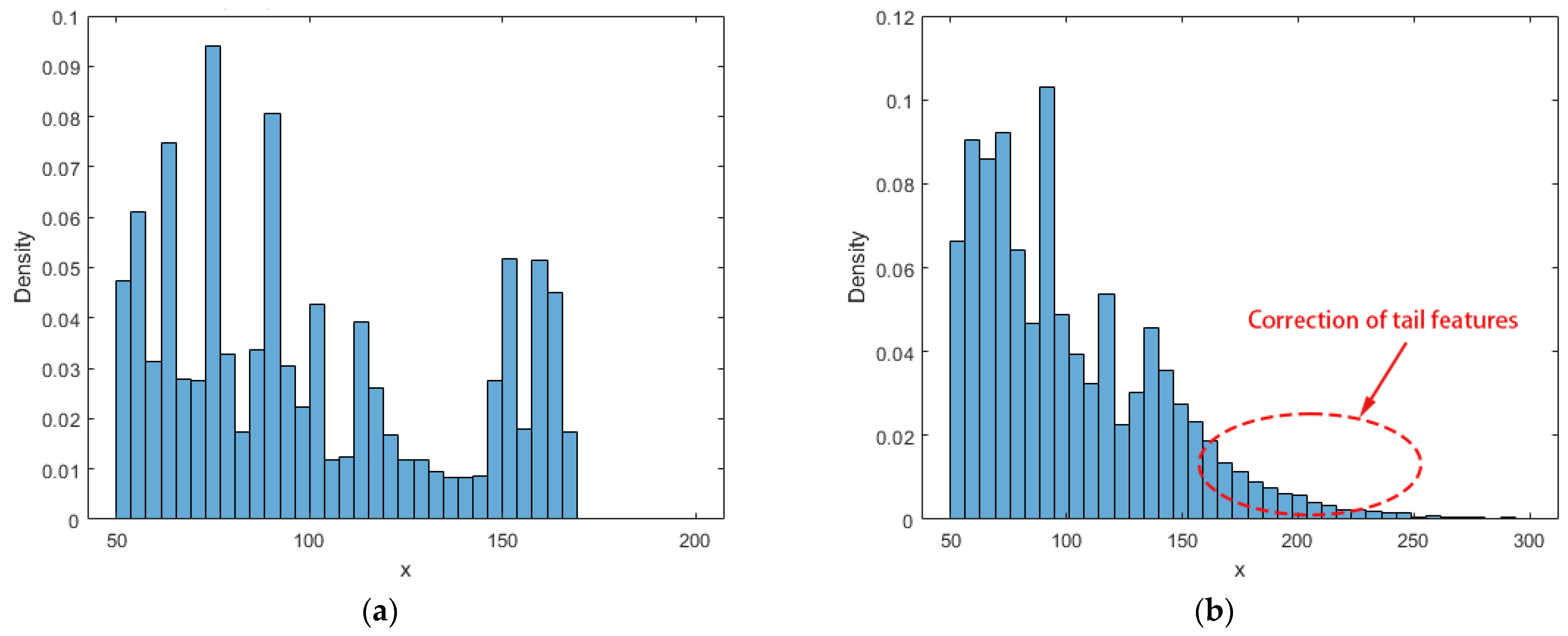
- The conventional bootstrap method is used to expand the original data, and sampling is performed 1000 times, resulting in the expanded samples , . The overall distribution of is shown in Figure 8a.
- 3.
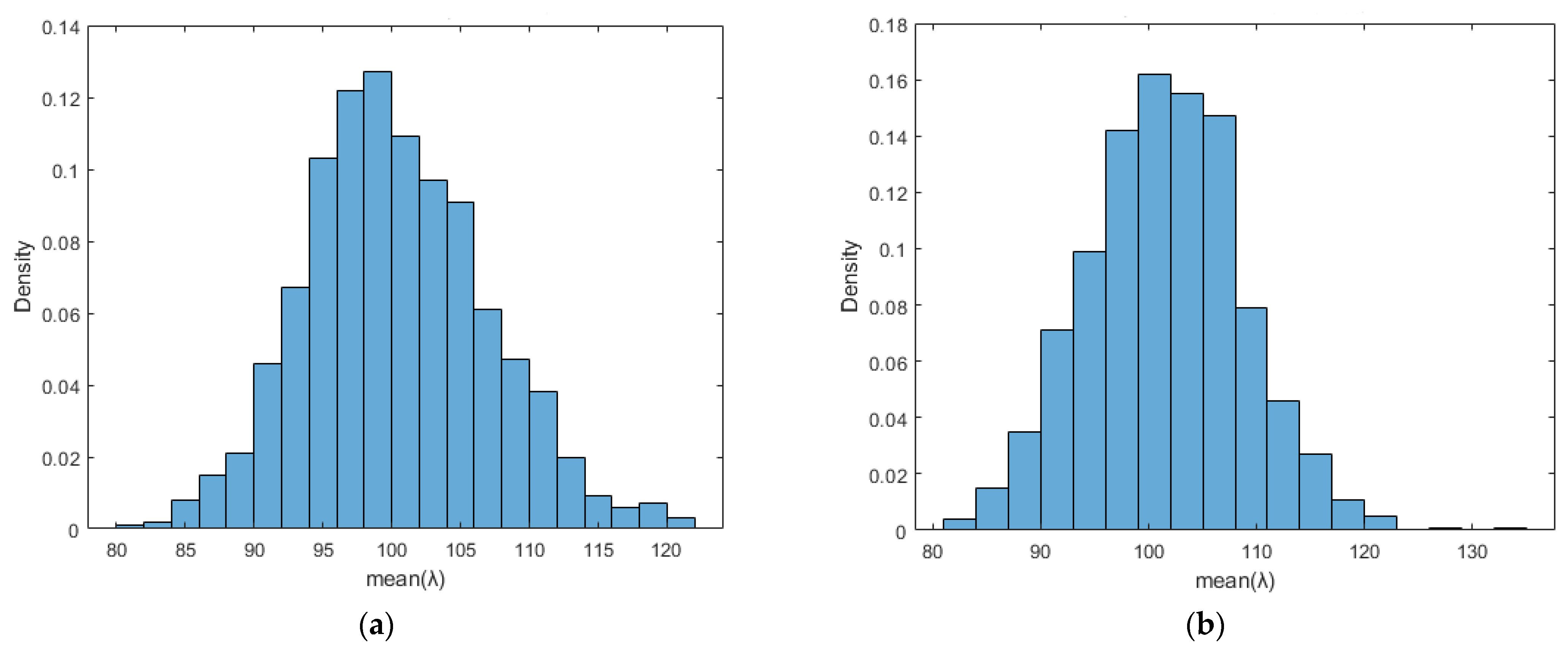
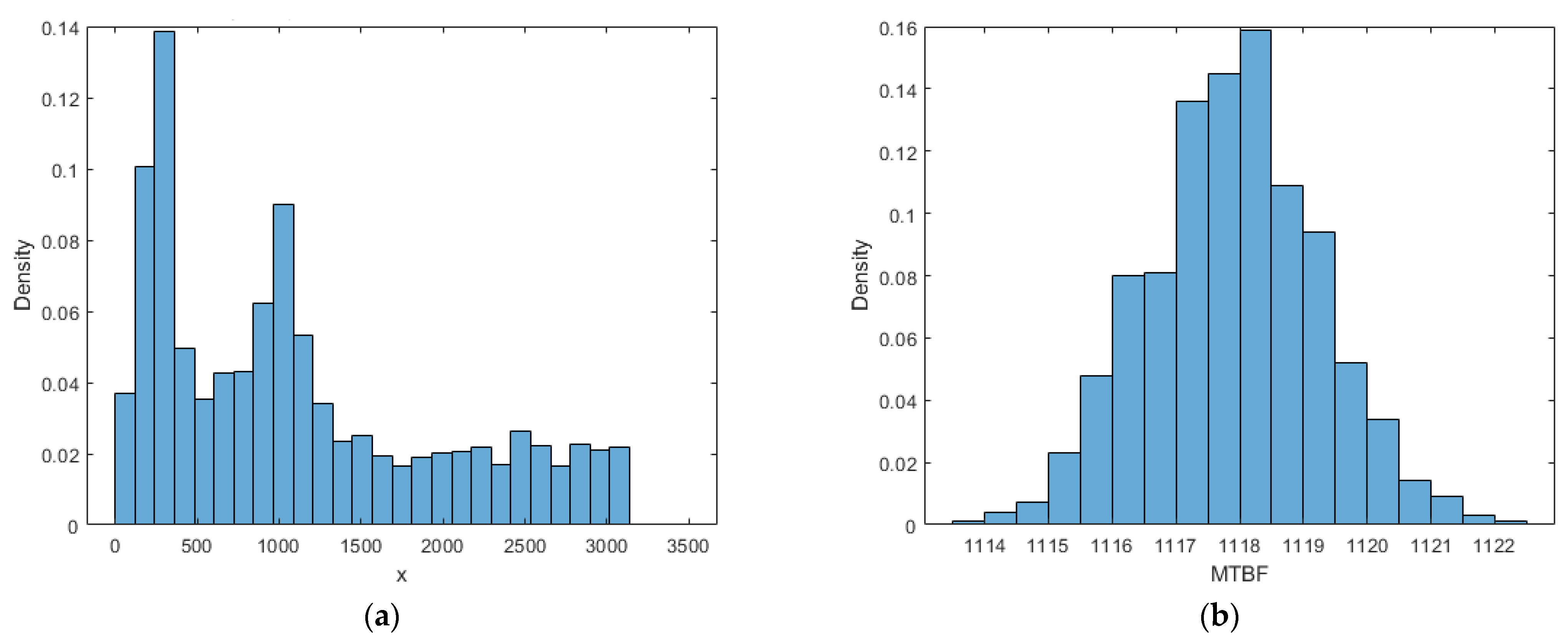
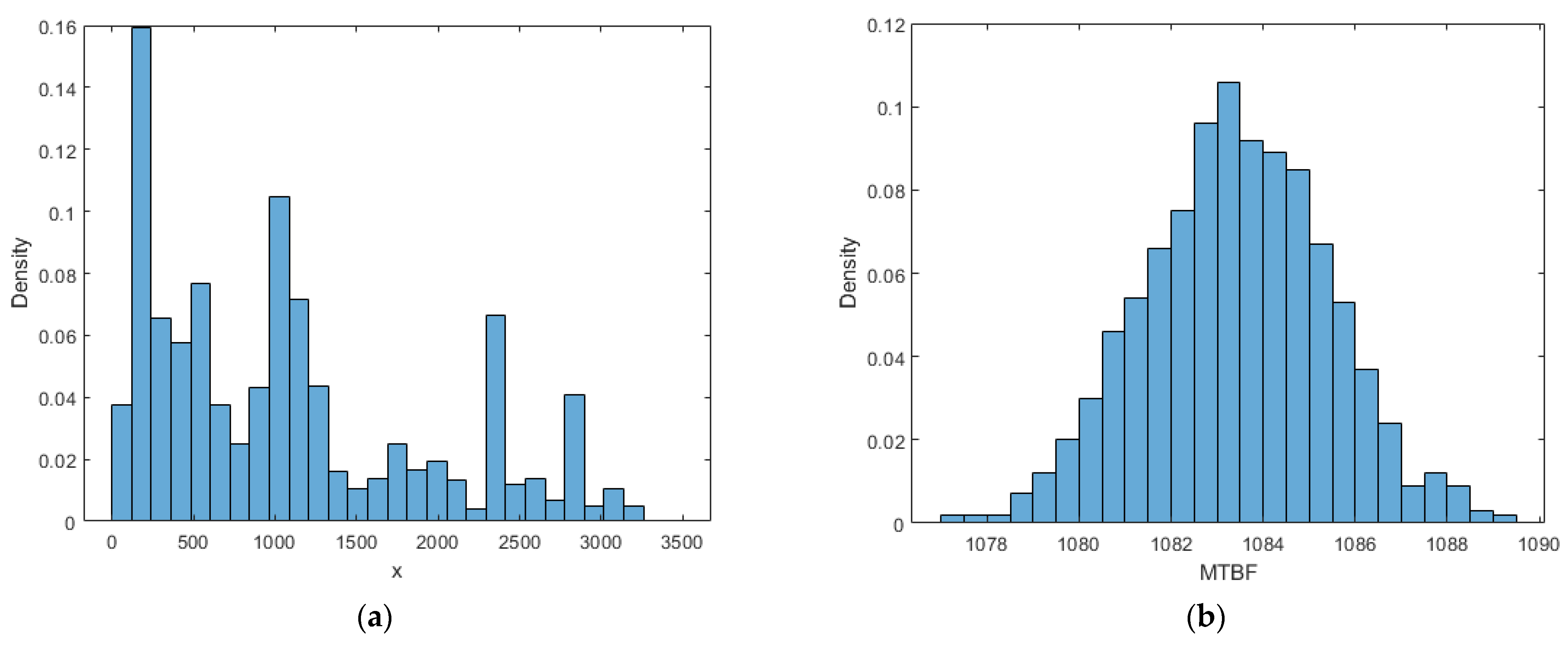
- The original data are expanded using the conventional bootstrap method and the improved bootstrap combined with the RBF neural network method. The “newrb” function in MATLAB (v2018b, MathWorks, Inc., Natick, MA, USA) is used to construct the RBF radial basis neural network. The network performance targets, expansion constants, and number of neurons, respectively, are set as . The calculation process is shown in Figure 7, and the results converge to yield the expanded samples of , , and . The average estimates of the Weibull parameters obtained using the conventional bootstrap method + RBF neural network are , with . The 95% confidence interval of is (1114.37, 1121.86), using the bias correction method. The average estimates of the Weibull parameters obtained using the improved bootstrap method + RBF neural network are , with . The 95% confidence interval of the obtained using the bias correction method is (1080.13, 1089.15). The overall distribution of is shown in Figure 9a, and the parameter distribution of is shown in Figure 9b. The overall distribution of is shown in Figure 10a, and the parameter distribution of is shown in Figure 10b.
- A higher peak value indicates that the life data are more concentrated around a specific time period. This suggests that the majority of components or systems are likely to fail around this point in time, demonstrating a lower variability in life spans. In other words, the lifespans of most components are expected to be relatively similar, leading to reduced uncertainty in life expectancy predictions.
- Additionally, a higher peak value implies more accurate reliability predictions at this specific time point. Since failure events are more likely to occur near the peak, this facilitates more precise planning for maintenance, replacement cycles, and inventory management.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wilson, A.G.; Fronczyk, K.M. Bayesian reliability: Combining information. Qual. Eng. 2017, 29, 119–129. [Google Scholar] [CrossRef]
- Wang, L.; Pan, R.; Wang, X.; Fan, W.; Xuan, J. A Bayesian reliability evaluation method with different types of data from multiple sources. Reliab. Eng. Syst. Saf. 2017, 167, 128–135. [Google Scholar] [CrossRef]
- BahooToroody, A.; Abaei, M.M.; Banda, O.V.; Montewka, J.; Kujala, P. On reliability assessment of ship machinery system in different autonomy degree; A Bayesian-based approach. Ocean Eng. 2022, 254, 111252. [Google Scholar] [CrossRef]
- Efron, B. Bootstrap methods: Another look at the jackknife. In Breakthroughs in Statistics: Methodology and Distribution; Kotz, S., Johnson, N.L., Eds.; Springer: New York, NY, USA, 1992; pp. 569–593. [Google Scholar]
- Picheny, V.; Kim, N.H.; Haftka, R.T. Application of bootstrap method in conservative estimation of reliability with limited samples. Struct. Multidisc. Optim. 2010, 41, 205–217. [Google Scholar] [CrossRef]
- Amalnerkar, E.; Lee, T.H.; Lim, W. Reliability analysis using bootstrap information criterion for small sample size response functions. Struct. Multidisc. Optim. 2020, 62, 2901–2913. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, X.; Wang, Y.; Wang, X. Parameter distribution characteristics of material fatigue life using improved bootstrap method. Int. J. Damage Mech. 2019, 28, 772–793. [Google Scholar] [CrossRef]
- Sun, H.; Hu, W.; Liu, H. Improvement of bayes bootstrap method based on interpolation method. Stat. Decis. 2017, 9, 74–77. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, L. Lifetime evaluation model of small sample based on Bootstrap theory. J. Beijing Univ. Aeronaut. Astronaut. 2022, 48, 106–112. [Google Scholar] [CrossRef]
- Tang, S.; Liu, G.; Li, X. A Bootstrap data expansion method based on RBF neural network and its application on IRSS reliability evaluation. China Meas. Test 2022, 48, 22–26. [Google Scholar]
- Zhang, C.W. Weibull parameter estimation and reliability analysis with zero-failure data from high-quality products. Reliab. Eng. Syst. Saf. 2021, 207, 107321. [Google Scholar] [CrossRef]
- Thanh Thach, T.; Briš, R. An additive Chen-Weibull distribution and its applications in reliability modeling. Qual. Reliab. Eng. Int. 2021, 37, 352–373. [Google Scholar] [CrossRef]
- Piña Monarrez, M.R.; Barraza-Contreras, J.M.; Villa-Señor, R.C. Vibration fatigue life reliability cable trough assessment by using Weibull distribution. Appl. Sci. 2023, 13, 4403. [Google Scholar] [CrossRef]
- Almarashi, A.M.; Algarni, A.; Nassar, M. On estimation procedures of stress-strength reliability for Weibull distribution with application. PLoS ONE 2020, 15, e0237997. [Google Scholar] [CrossRef]
- Poletto, J.P. An alternative to the exponential and Weibull reliability models. IEEE Access 2022, 10, 118759–118778. [Google Scholar] [CrossRef]
- Bai, H. A New Resampling Method to Improve Quality Research with Small Samples. Doctoral Dissertation, University of Cincinnati, Cincinnati, OH, USA, 2007. [Google Scholar]
- Larsen, J.E.P.; Lund, O.; Nielsen, M. Improved method for predicting linear B-cell epitopes. Immunome Res. 2006, 2, 1–7. [Google Scholar] [CrossRef]
- Linton, O.; Song, K.; Whang, Y.-J. An improved bootstrap test of stochastic dominance. J. Econom. 2010, 154, 186–202. [Google Scholar] [CrossRef]
- Ali, S.; Ali, S.; Shah, I.; Siddiqui, G.F.; Saba, T.; Rehman, A. Reliability analysis for electronic devices using generalized exponential distribution. IEEE Access 2020, 8, 108629–108644. [Google Scholar] [CrossRef]
- Collins, D.H.; Warr, R.L. Failure time distributions for complex equipment. Qual. Reliab. Eng. Int. 2019, 35, 146–154. [Google Scholar] [CrossRef]
- Chahkandi, M.; Ganjali, M. On some lifetime distributions with decreasing failure rate. Comput. Stat. Data Anal. 2009, 53, 4433–4440. [Google Scholar] [CrossRef]
- Xiao, G.; Li, T. Monte Carlo Method in System Reliability Analysis; Science Press: Beijing, China, 2003. [Google Scholar]
- Qian, J.; Chen, L.; Sun, J.-Q. Random vibration analysis of vibro-impact systems: RBF neural network method. Int. J. Non-Linear Mech. 2023, 148, 104261. [Google Scholar] [CrossRef]
- Sing, J.; Basu, D.; Nasipuri, M.; Kundu, M. Improved k-means algorithm in the design of RBF neural networks. In Proceedings of the TENCON 2003. Conference on Convergent Technologies for Asia-Pacific Region, Bangalore, India, 15–17 October 2003; pp. 841–845. [Google Scholar]
- Nabney, I.T. Efficient training of RBF networks for classification. Int. J. Neural Syst. 2004, 14, 201–208. [Google Scholar] [CrossRef] [PubMed]
- Hansen, B.E.; Racine, J.S. Jackknife model averaging. J. Econ. 2012, 167, 38–46. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 51.67 | 64.43 | 85.08 | 102.42 | 151.11 |
| 52.27 | 68.97 | 88.70 | 113.02 | 152.14 |
| 56.96 | 74.02 | 88.88 | 115.54 | 159.35 |
| 57.38 | 74.20 | 91.13 | 120.89 | 160.67 |
| 61.56 | 76.24 | 94.91 | 131.71 | 164.48 |
| 63.95 | 77.65 | 100.55 | 147.34 | 166.26 |
| Parameter Point Estimate | Estimation of Confidence Intervals | ||||
|---|---|---|---|---|---|
| Expected Value | Estimated Value | Error | Estimated Value | Interval Length | |
| Conventional bootstrap | 100.4493 | 99.7526 | 0.6967 | [99.1357, 100.6059] | 1.4702 |
| Improved bootstrap | 101.1103 | 0.6610 | [100.8831, 101.3135] | 0.4304 | |
| Number | Time between Failures (h) | |||||
|---|---|---|---|---|---|---|
| K1 | 63.5 | 215.5 | 302 | 639.5 | 945.5 | 1264.25 |
| 2332.5 | 2591.5 | 2894 | ||||
| K2 | 178 | 318.08 | 374.5 | 645.5 | 1240.42 | 1246.58 |
| 1337 | 1419.5 | 2154 | ||||
| K3 | 215.3 | 230.17 | 837.33 | 838.67 | 1017.27 | 1486 |
| 2491.17 | 2842.33 | |||||
| K4 | 537.25 | 862.38 | 953.67 | 1027.67 | 1045.5 | 1274 |
| 1584 | 2449.25 | 3062.08 | ||||
| K5 | 194 | 271.5 | 399 | 913 | 1040 | 1873.5 |
| 2304.5 | 3062.5 | |||||
| K6 | 141.5 | 239.5 | 241.83 | 397.67 | 454.5 | 1382.5 |
| 2027.5 | 2312 | 2591.83 | ||||
| K7 | 153.5 | 184 | 186 | 409 | 639 | 655.5 |
| 686 | 1037 | 1375 | ||||
| Point Estimates (h) | Rated Value (h) | Absolute Error (h) | Relative Error (%) | Confidence Interval | Interval Length | |
|---|---|---|---|---|---|---|
| Maximum likelihood method | 1118.20 | 1000 | 118.20 | 11.82 | \ | \ |
| Bootstrap | 1114.97 | 114.97 | 11.50 | (1099.51, 1130.47) | 30.96 | |
| RBF + conventional bootstrap | 1118.32 | 118.32 | 11.83 | (1114.37, 1121.86) | 7.49 | |
| RBF +improved bootstrap | 1083.41 | 83.41 | 8.34 | (1080.13, 1089.15) | 9.02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Liu, H.; Shao, S. Improved Bootstrap Method Based on RBF Neural Network for Reliability Assessment. Appl. Sci. 2024, 14, 2901. https://doi.org/10.3390/app14072901
Wang H, Liu H, Shao S. Improved Bootstrap Method Based on RBF Neural Network for Reliability Assessment. Applied Sciences. 2024; 14(7):2901. https://doi.org/10.3390/app14072901
Chicago/Turabian StyleWang, Houxiang, Haitao Liu, and Songshi Shao. 2024. "Improved Bootstrap Method Based on RBF Neural Network for Reliability Assessment" Applied Sciences 14, no. 7: 2901. https://doi.org/10.3390/app14072901
APA StyleWang, H., Liu, H., & Shao, S. (2024). Improved Bootstrap Method Based on RBF Neural Network for Reliability Assessment. Applied Sciences, 14(7), 2901. https://doi.org/10.3390/app14072901