
Research on Obstacle Avoidance Replanning and Trajectory Tracking Control Driverless Ferry Vehicles


Abstract
:1. Introduction
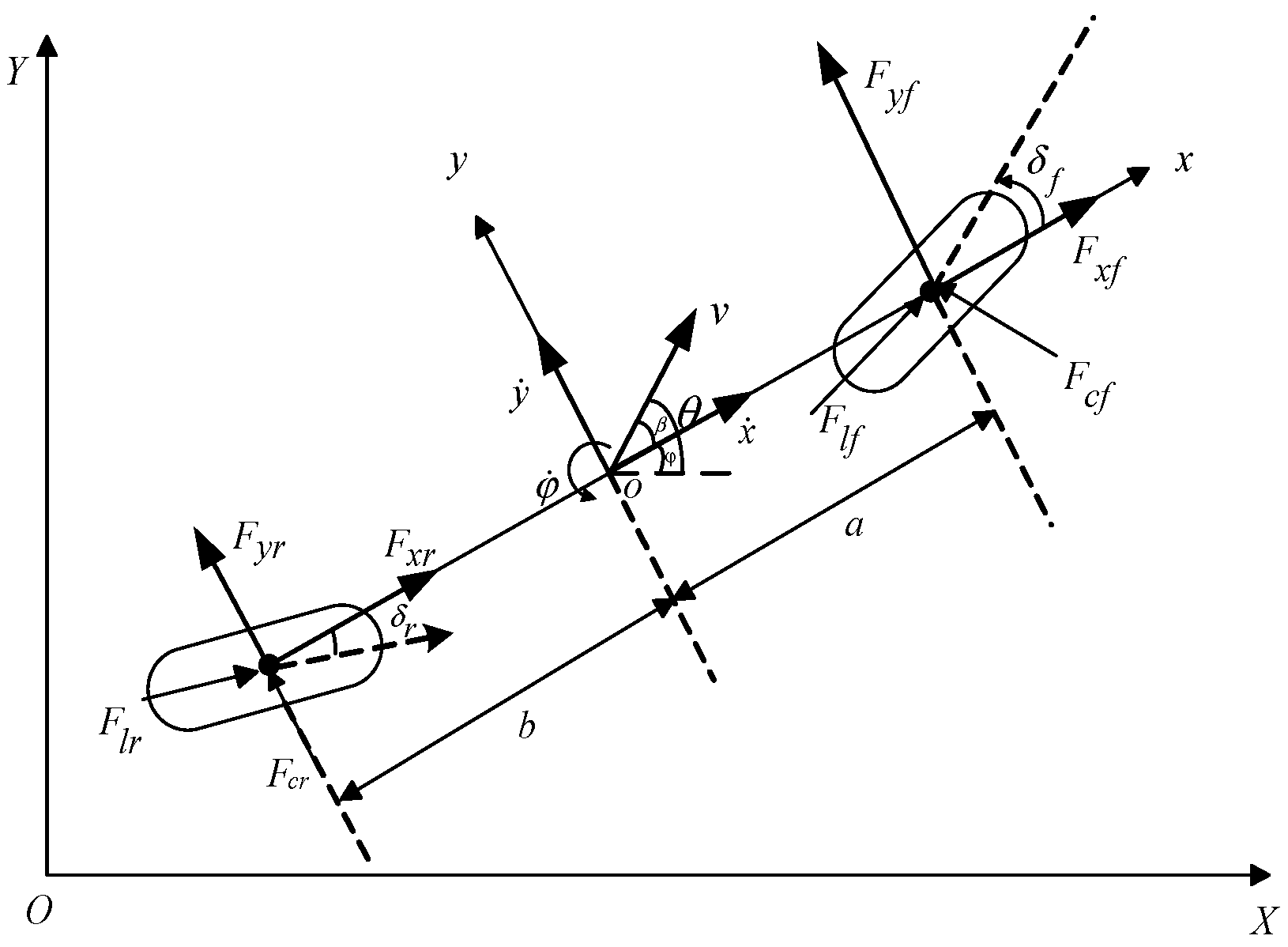
2. Vehicle Model
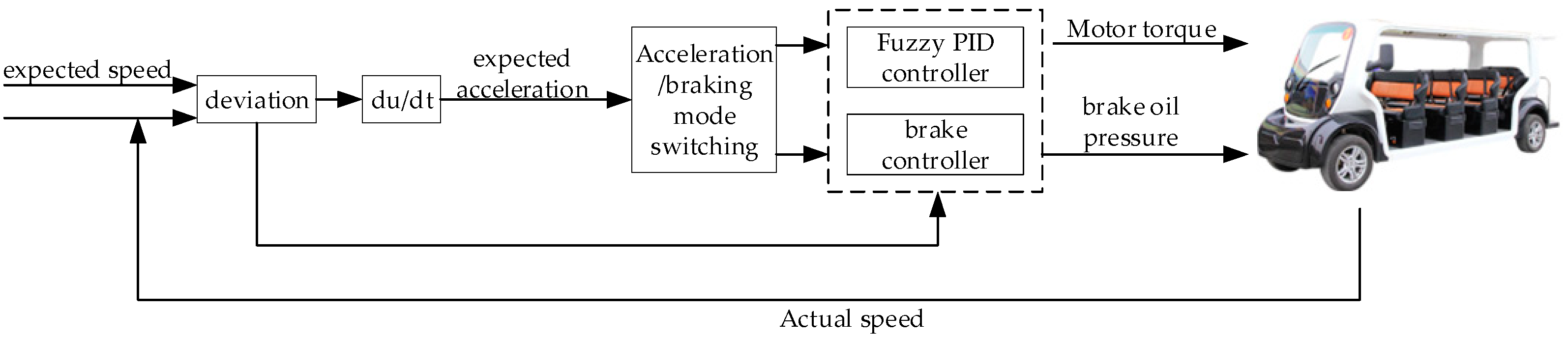
3. Longitudinal Controller Design
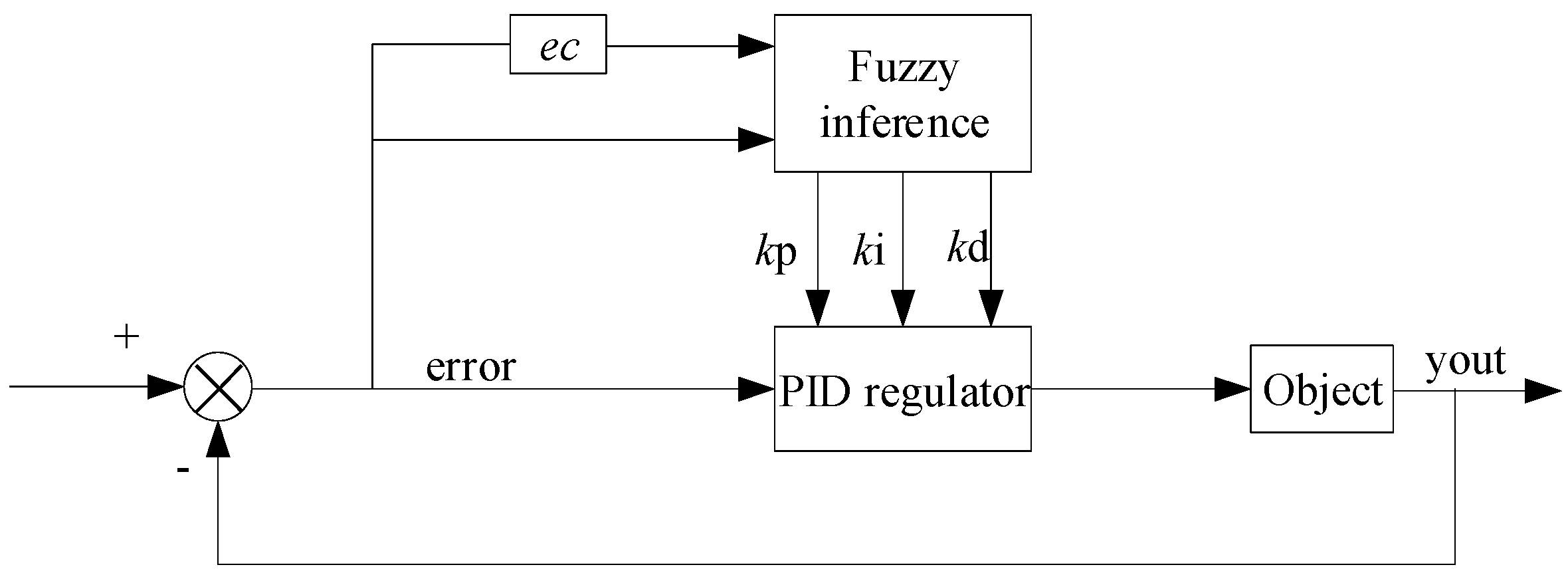
3.1. Fuzzy PID Acceleration Controller Design
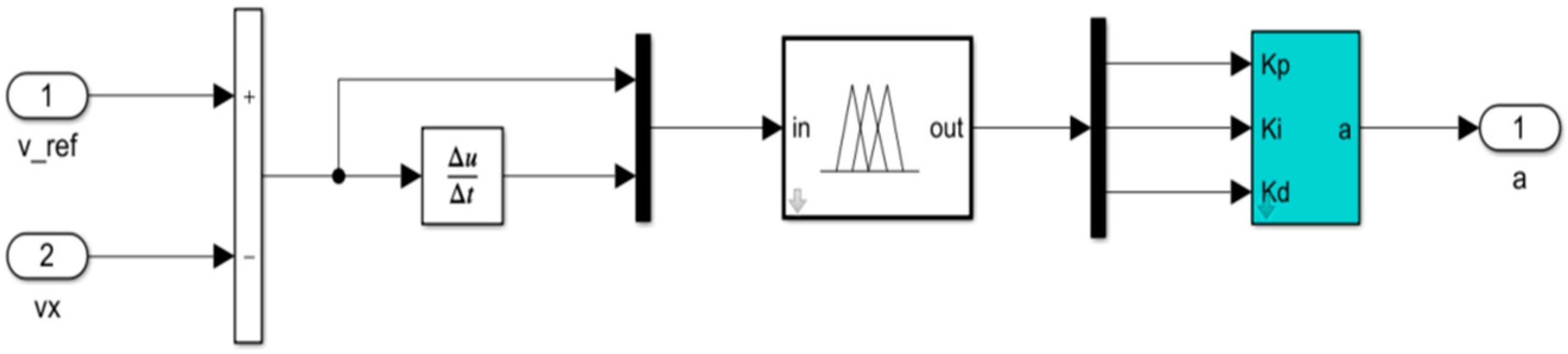
3.1.1. Controller Structure
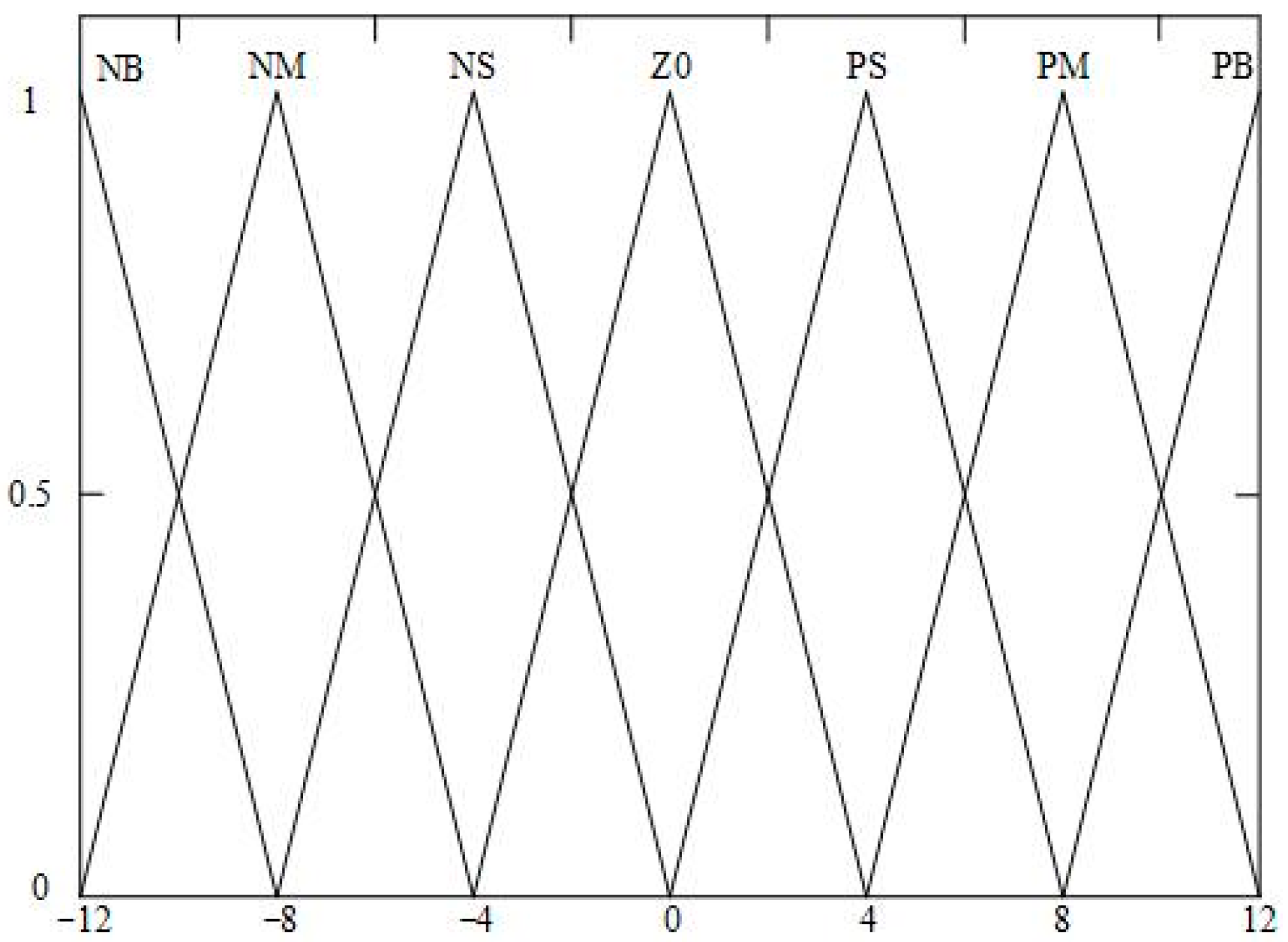
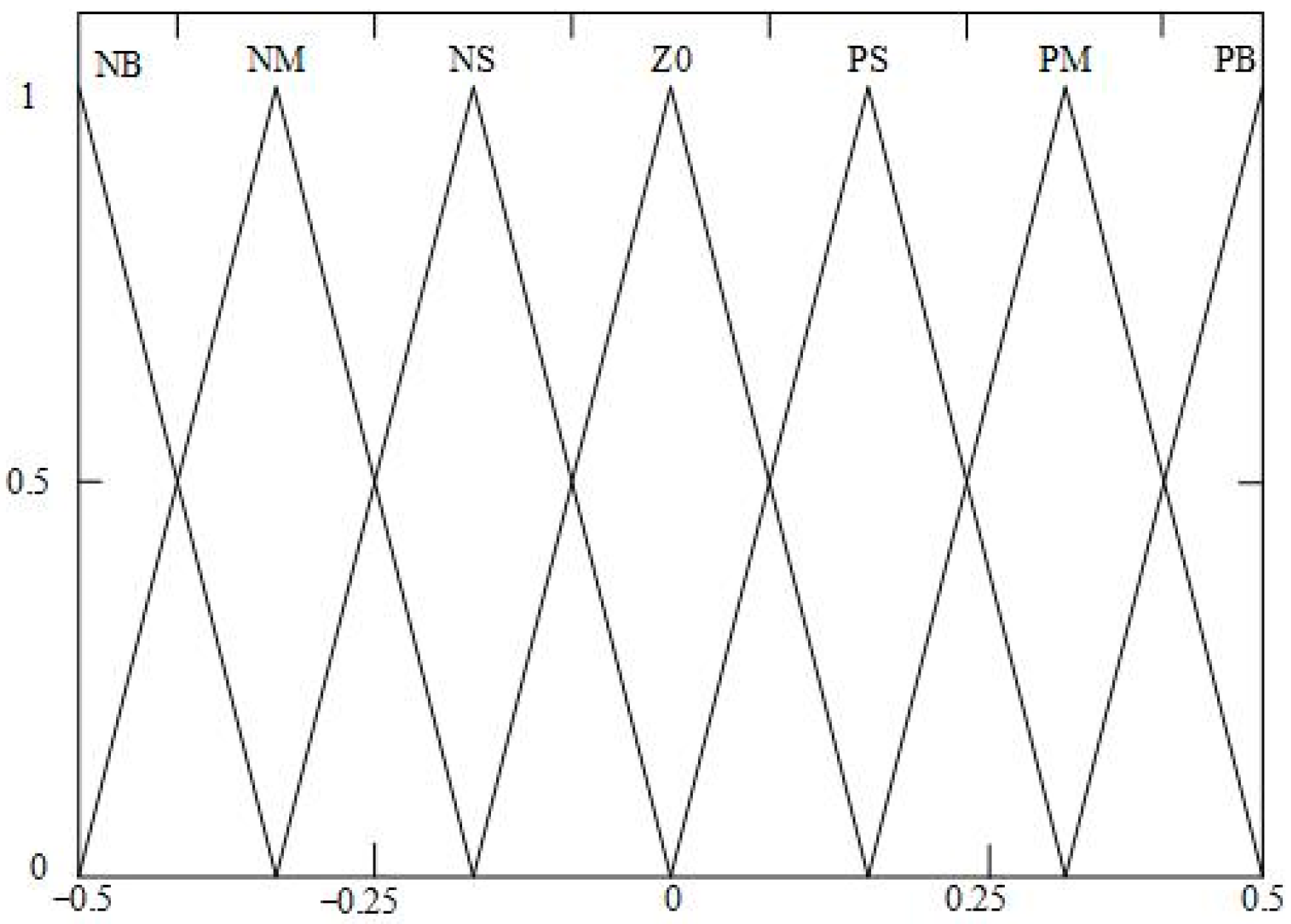
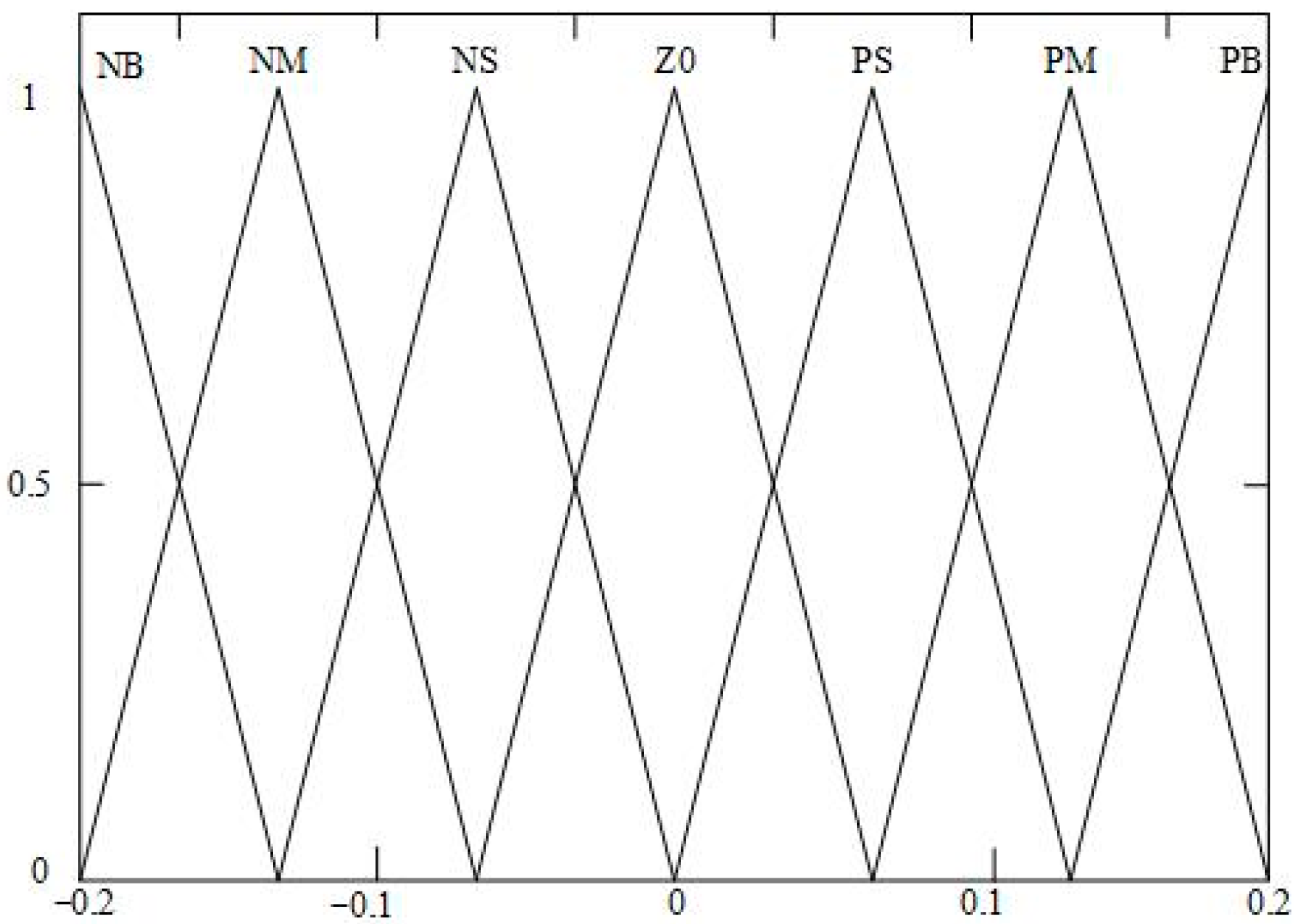
3.1.2. Fuzzification
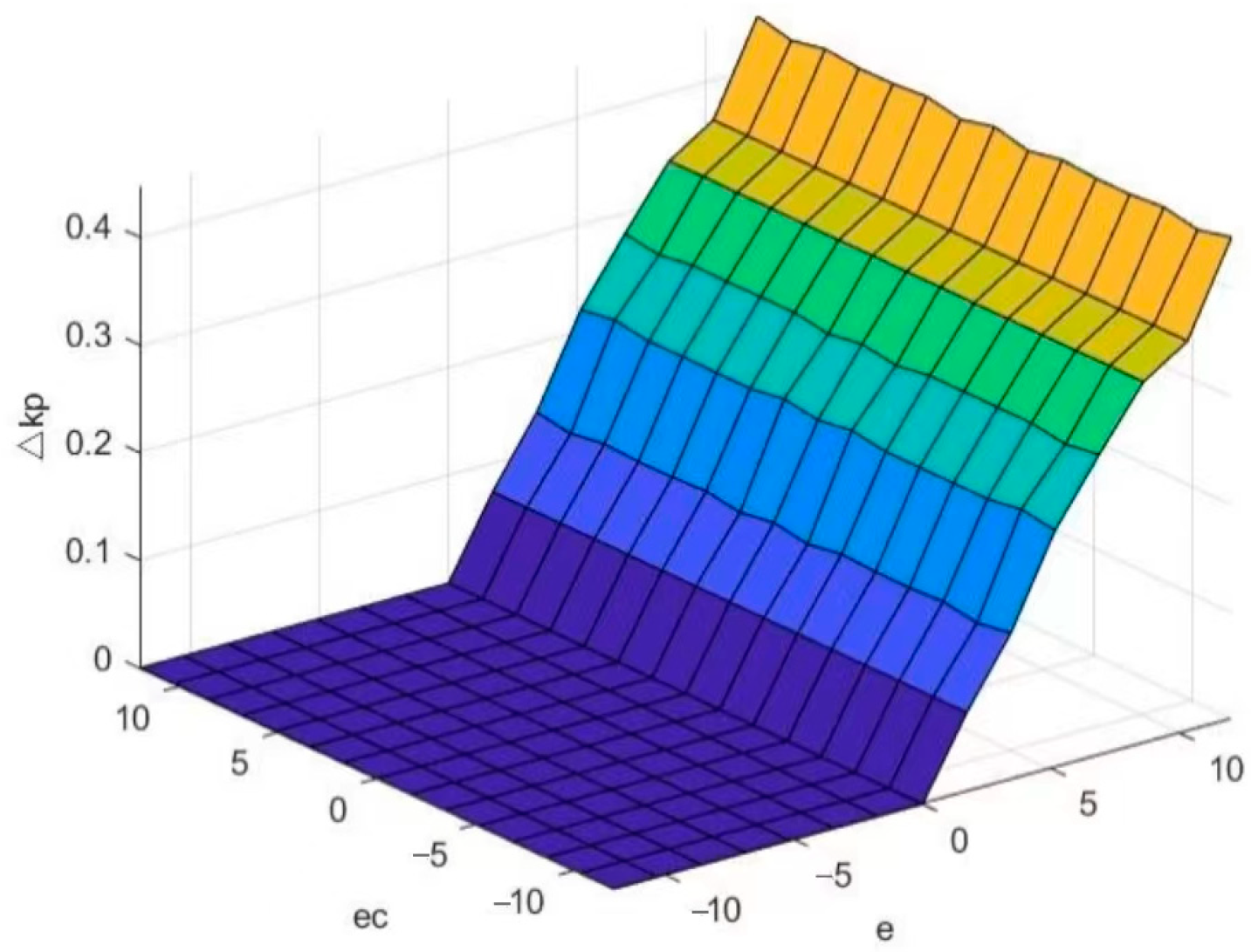
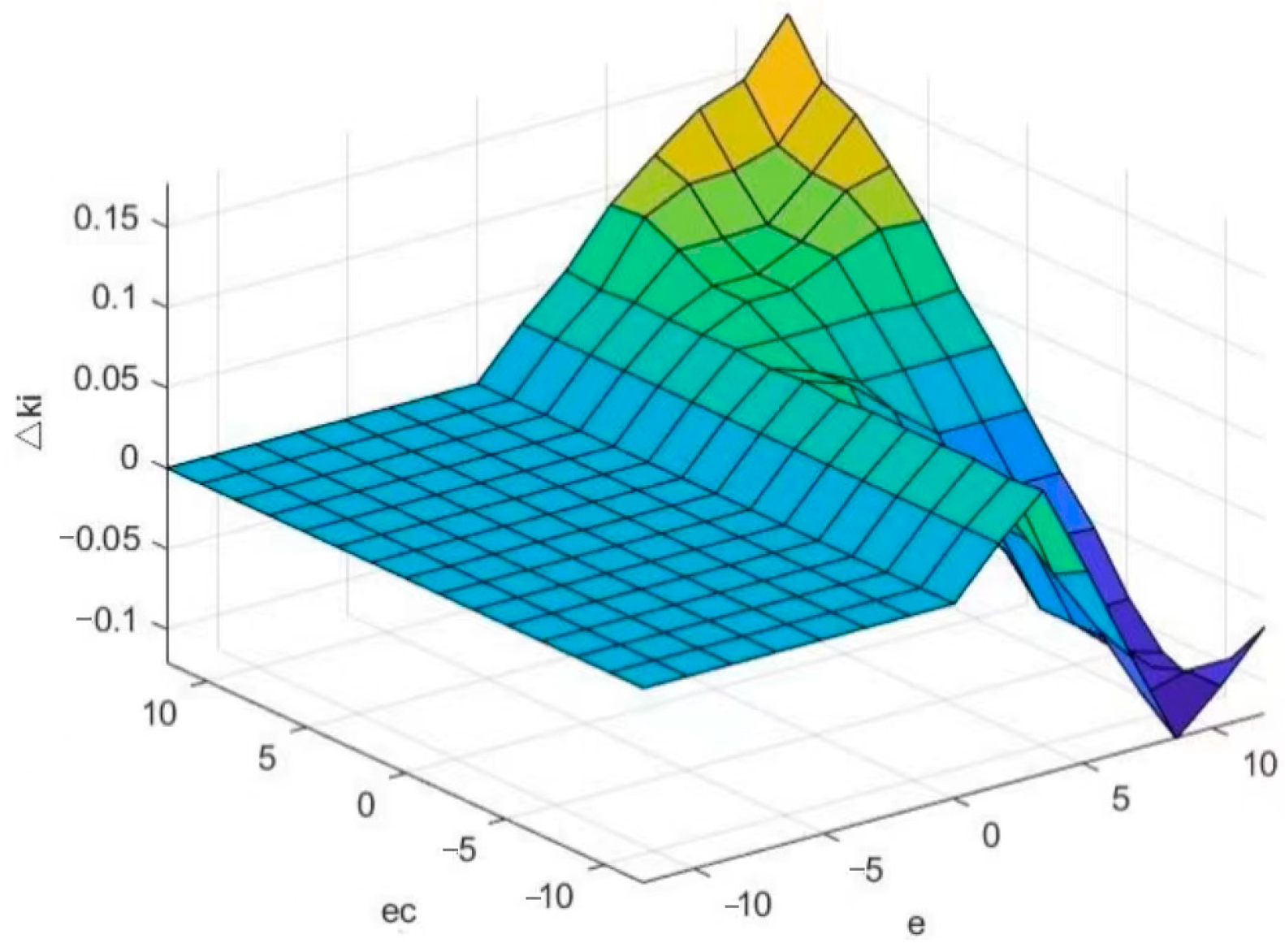
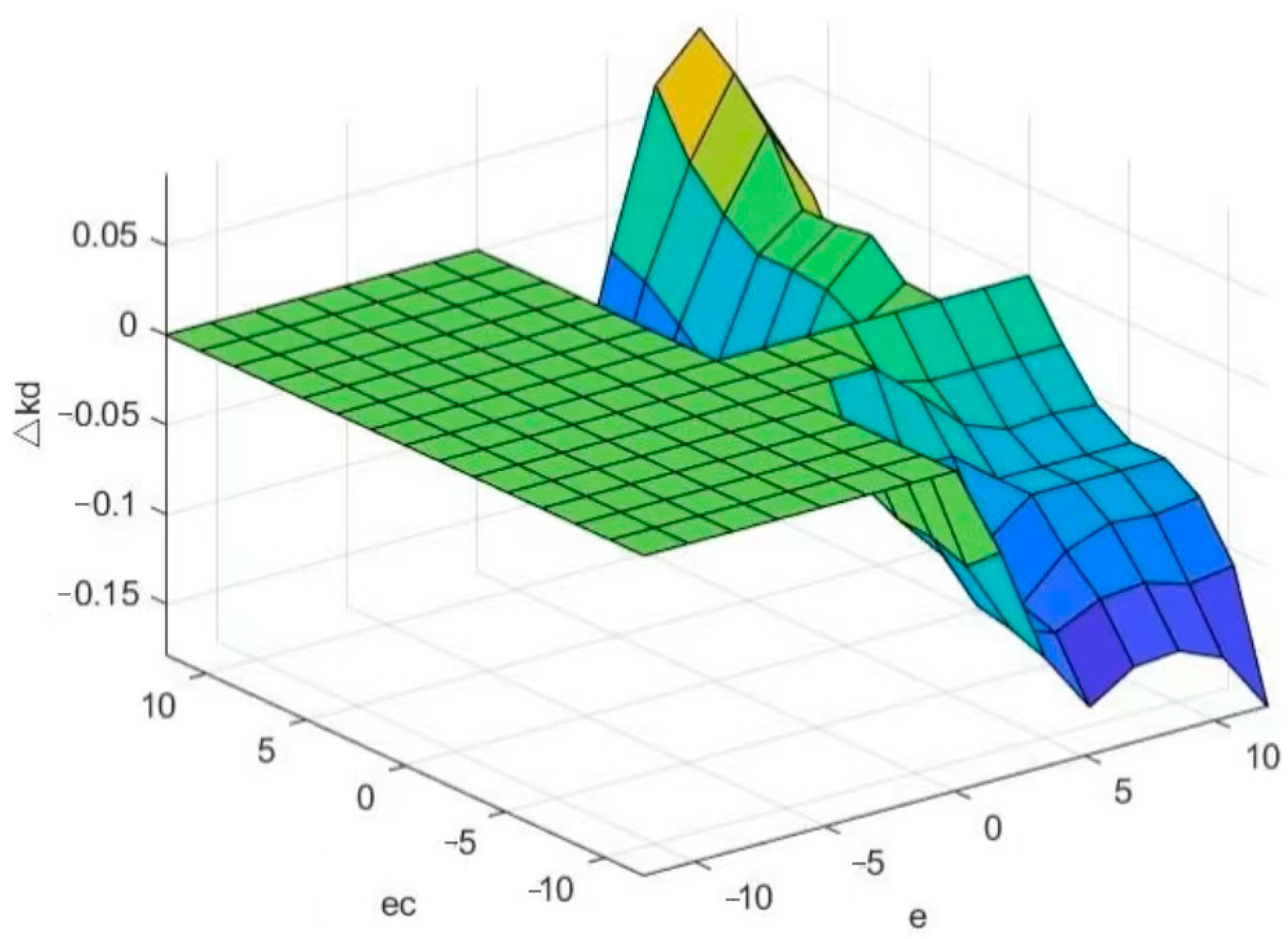
3.1.3. Fuzzy Rules
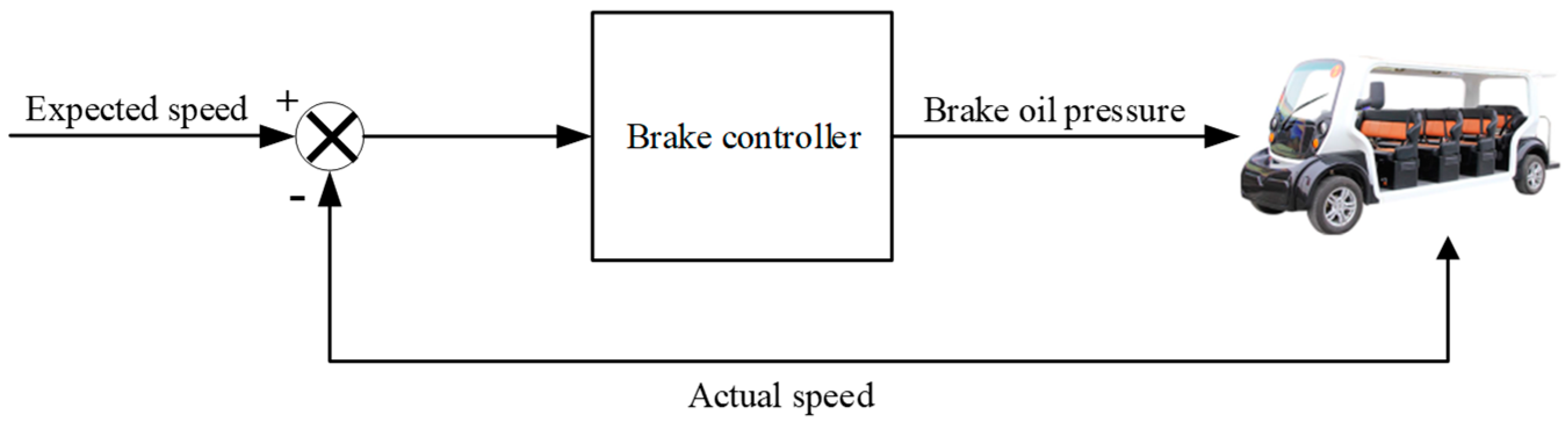
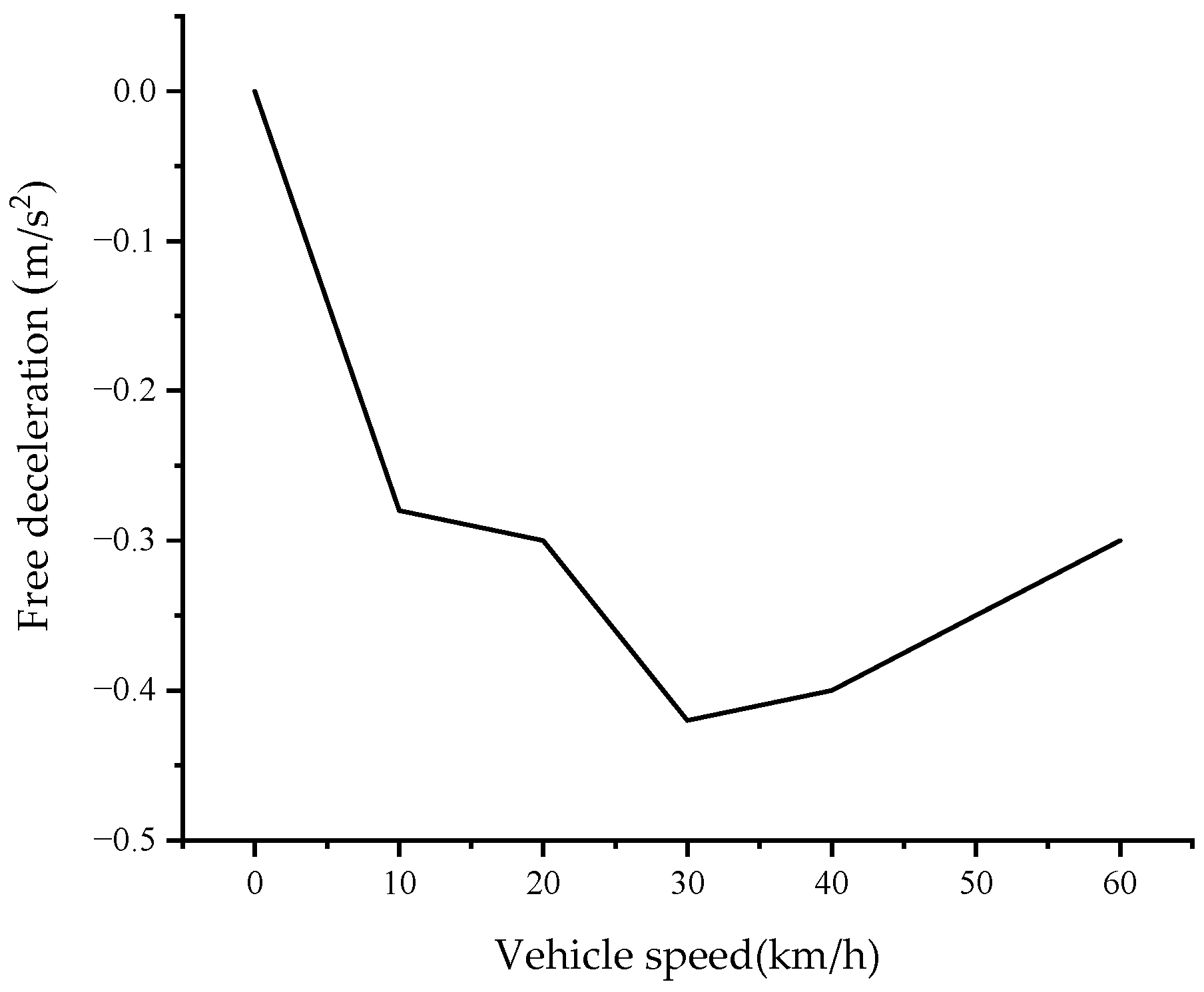
3.2. Brake Control Design
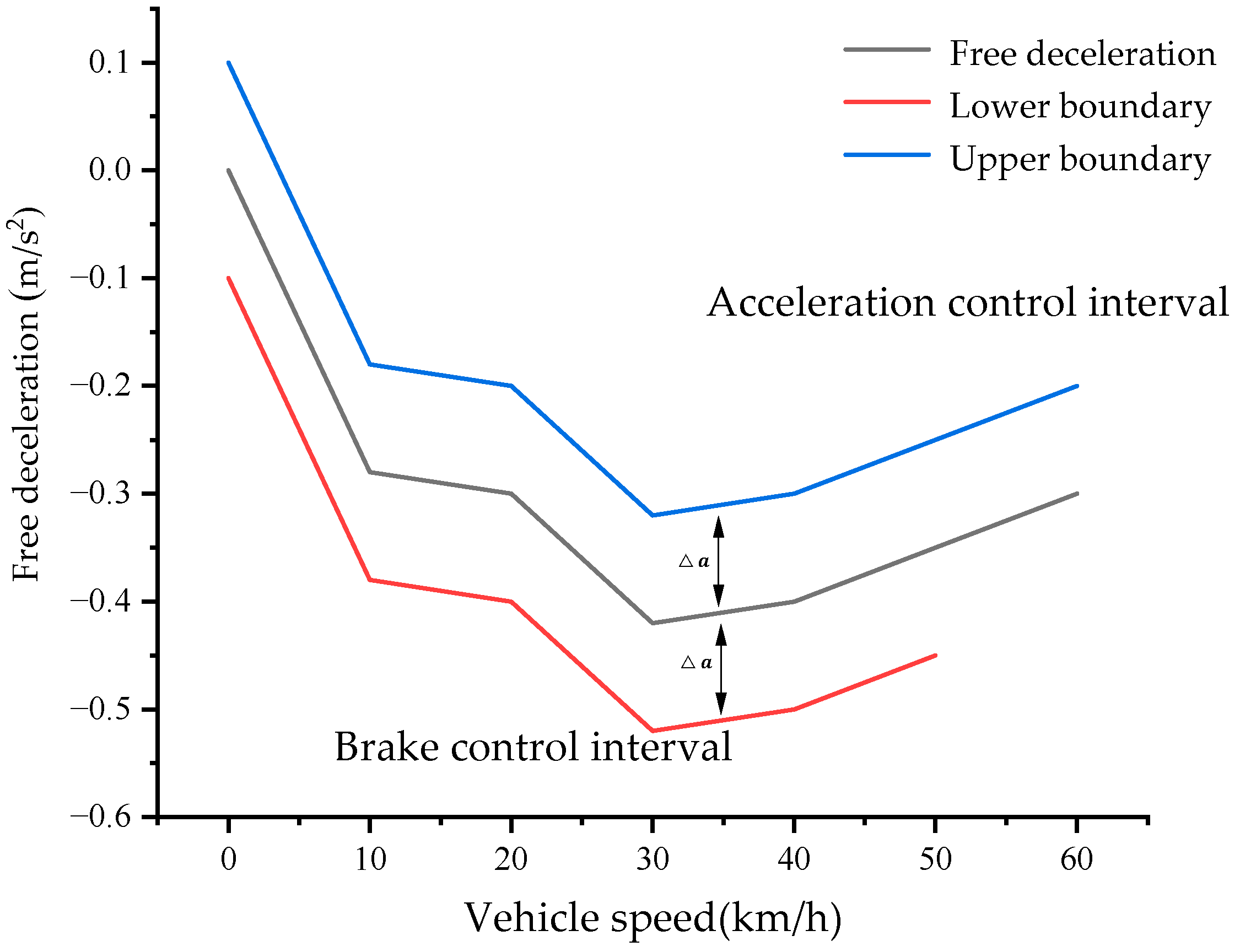
3.3. Acceleration and Braking Mode Switching Controller
4. Obstacle Avoidance Algorithm and Transverse Controller Design
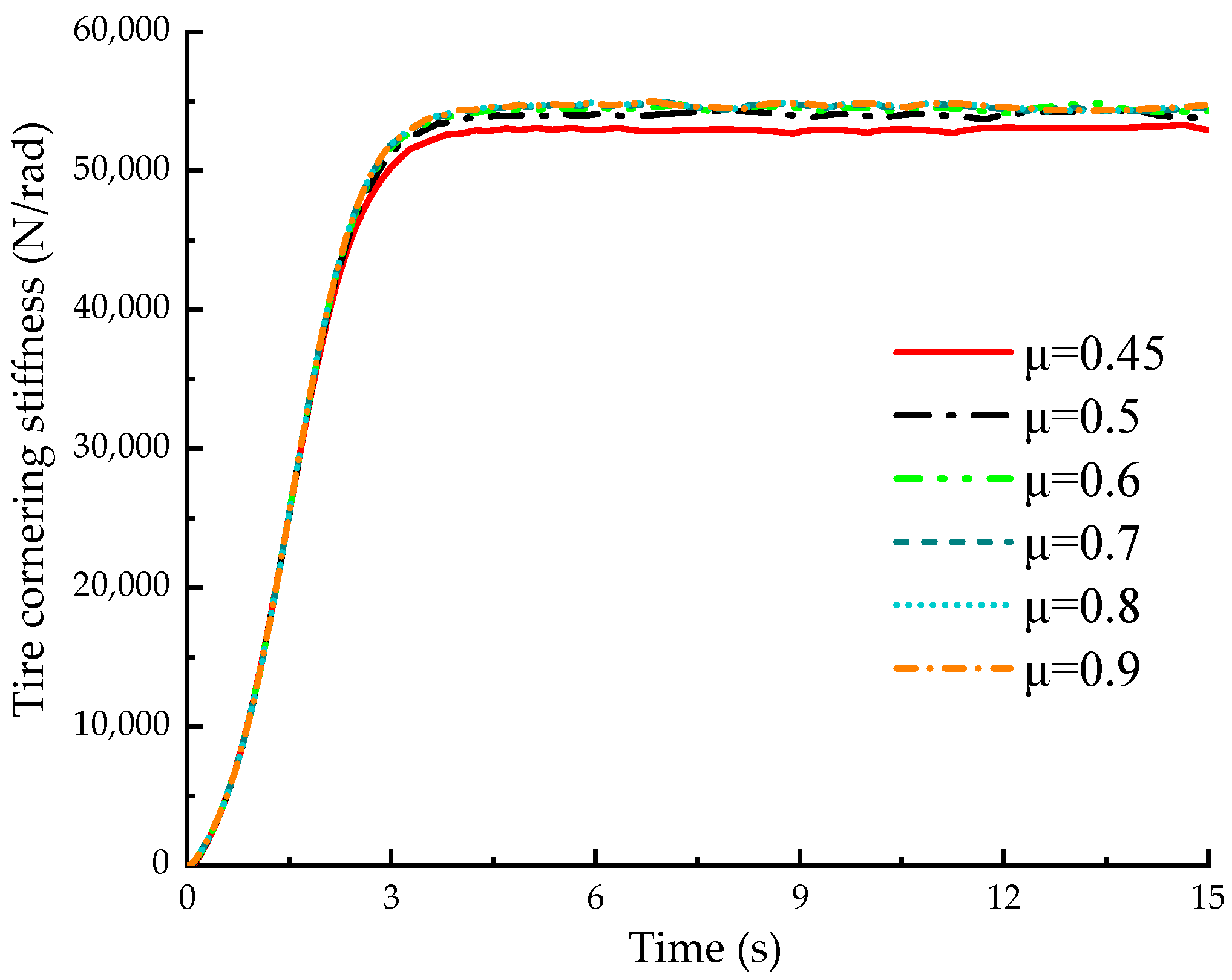
4.1. Analysis of Tire Cornering Stiffness
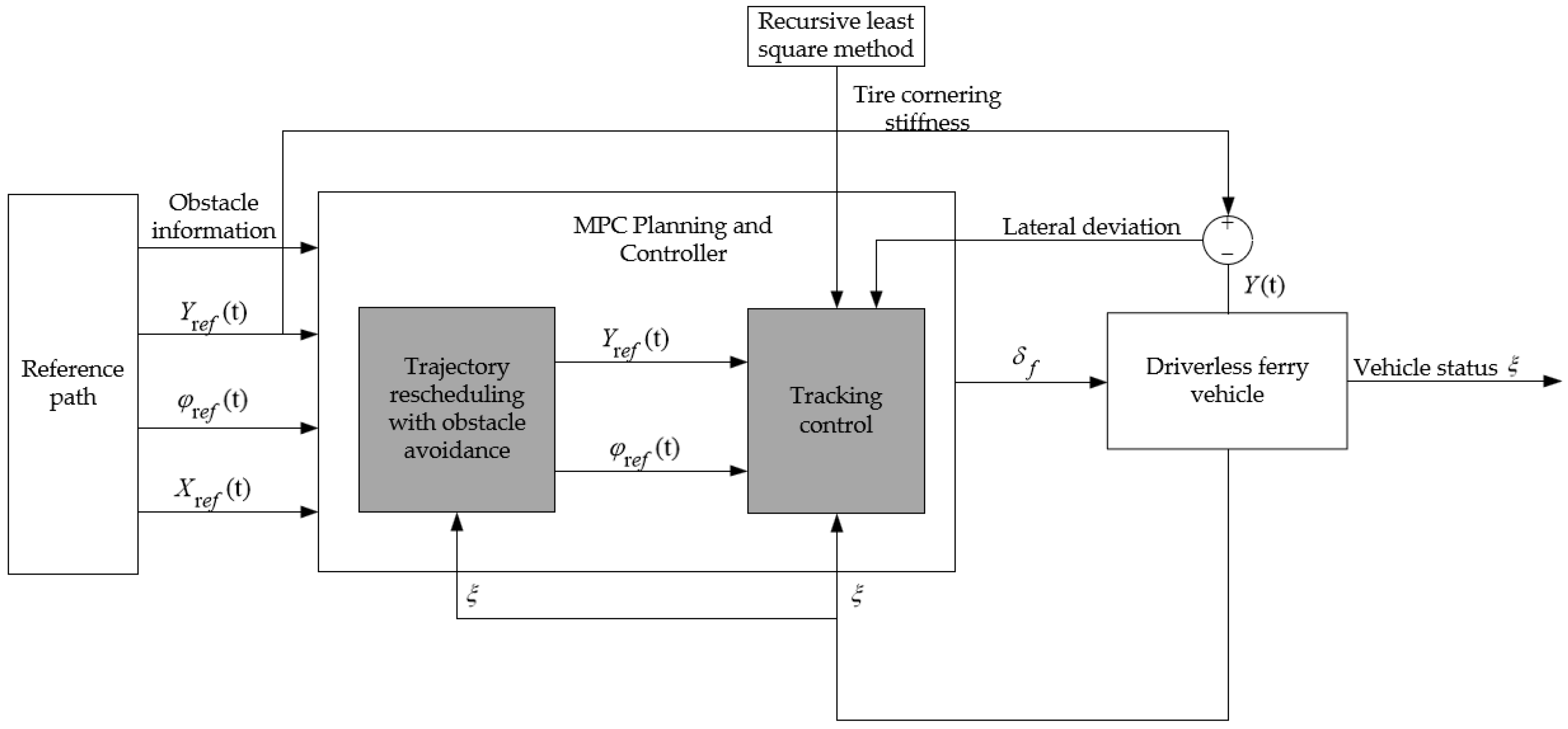
4.2. Design of MPC Controller with Planning Module
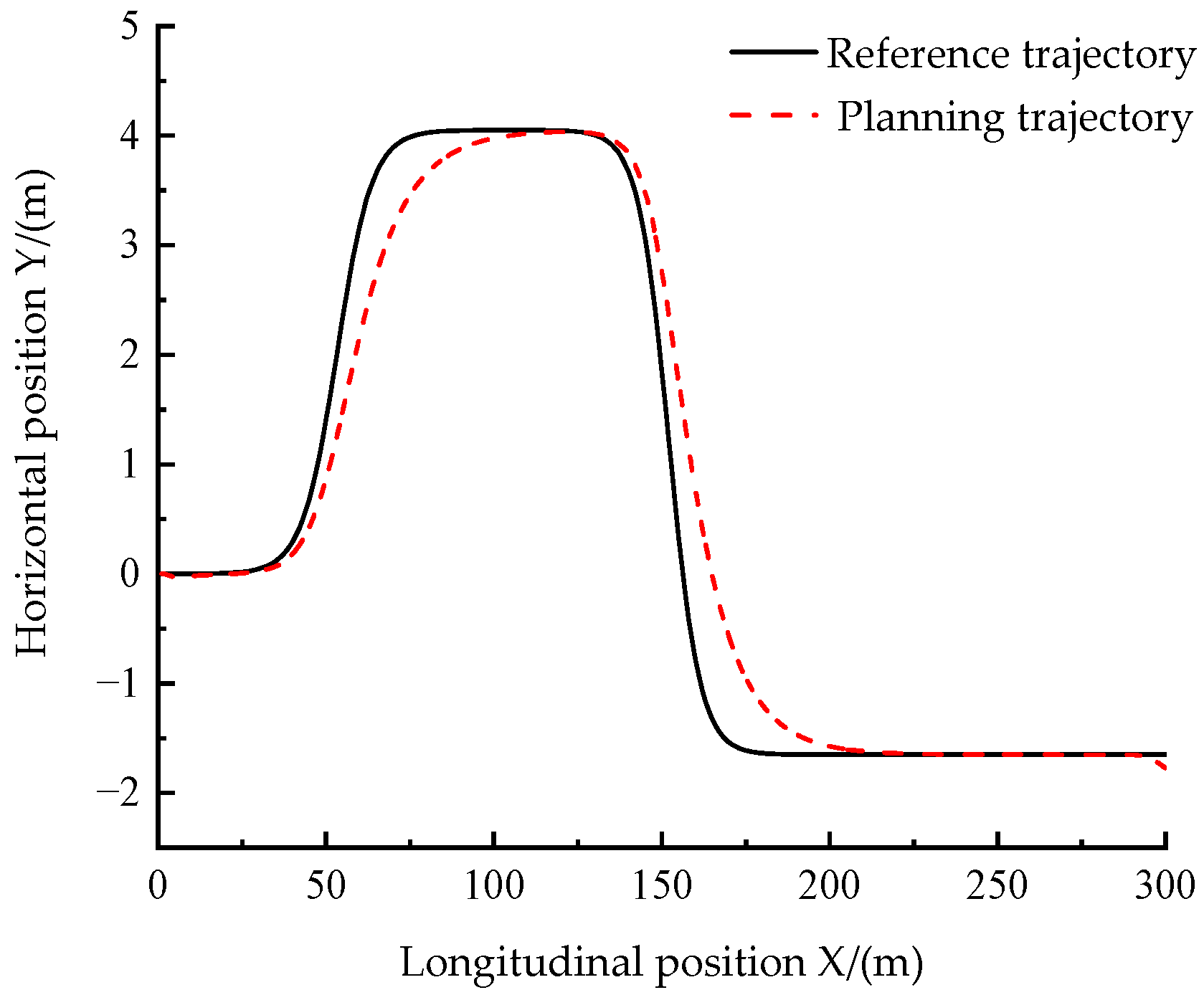
4.2.1. Trajectory Planning Layer Design
- (1)
- The deviation between the desired trajectory of the vehicle obtained by the planning module and the reference trajectory obtained by the global planning should be as small as possible.
- (2)
- The expected trajectory obtained by the planning module should meet the dynamic constraints of the ferry vehicle.
- (3)
- The added trajectory planning module should be able to avoid obstacles.
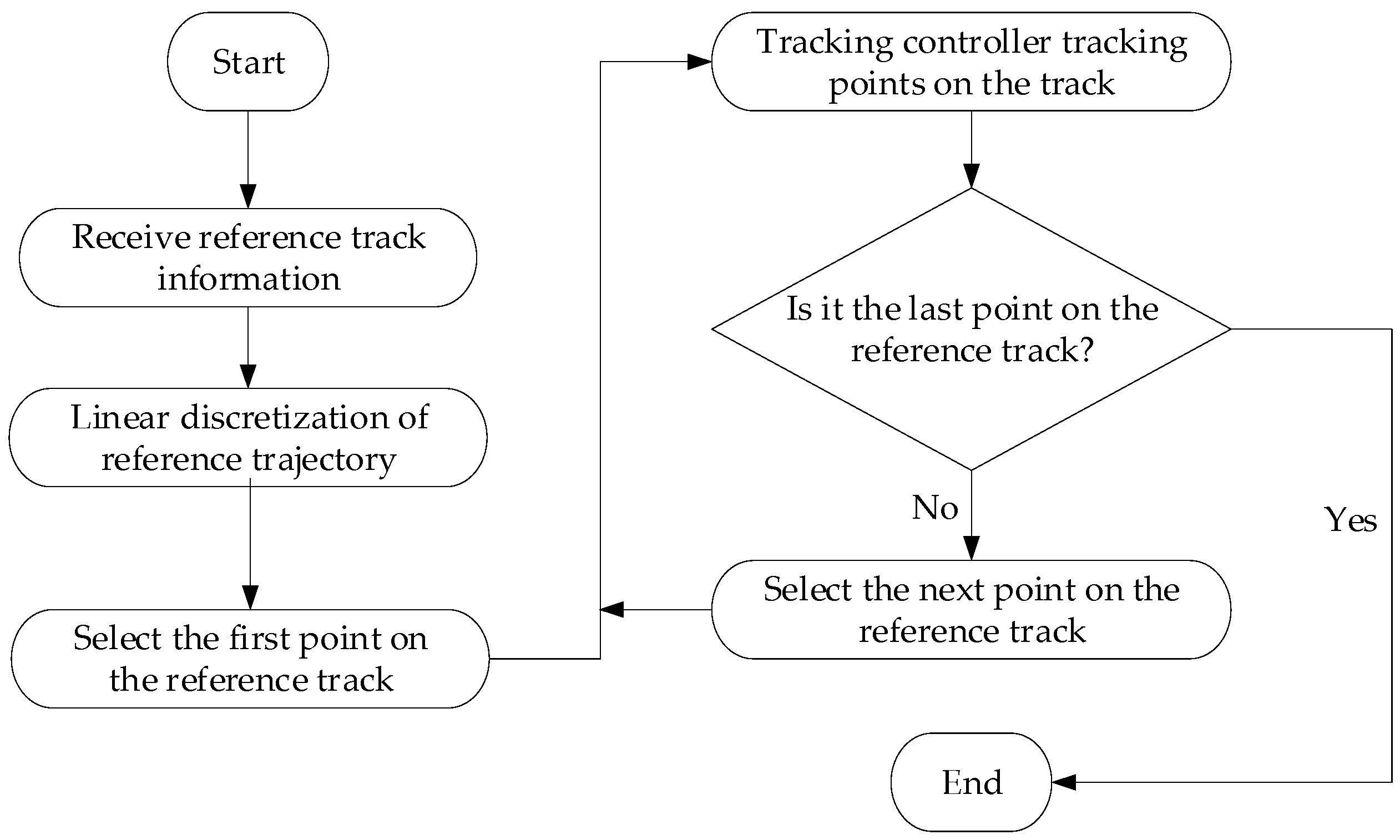
4.2.2. Tracking Control Layer Design
4.2.3. Linear Discretization of Nonlinear Models
4.2.4. Establish Constraints
4.2.5. Objective-Function Design
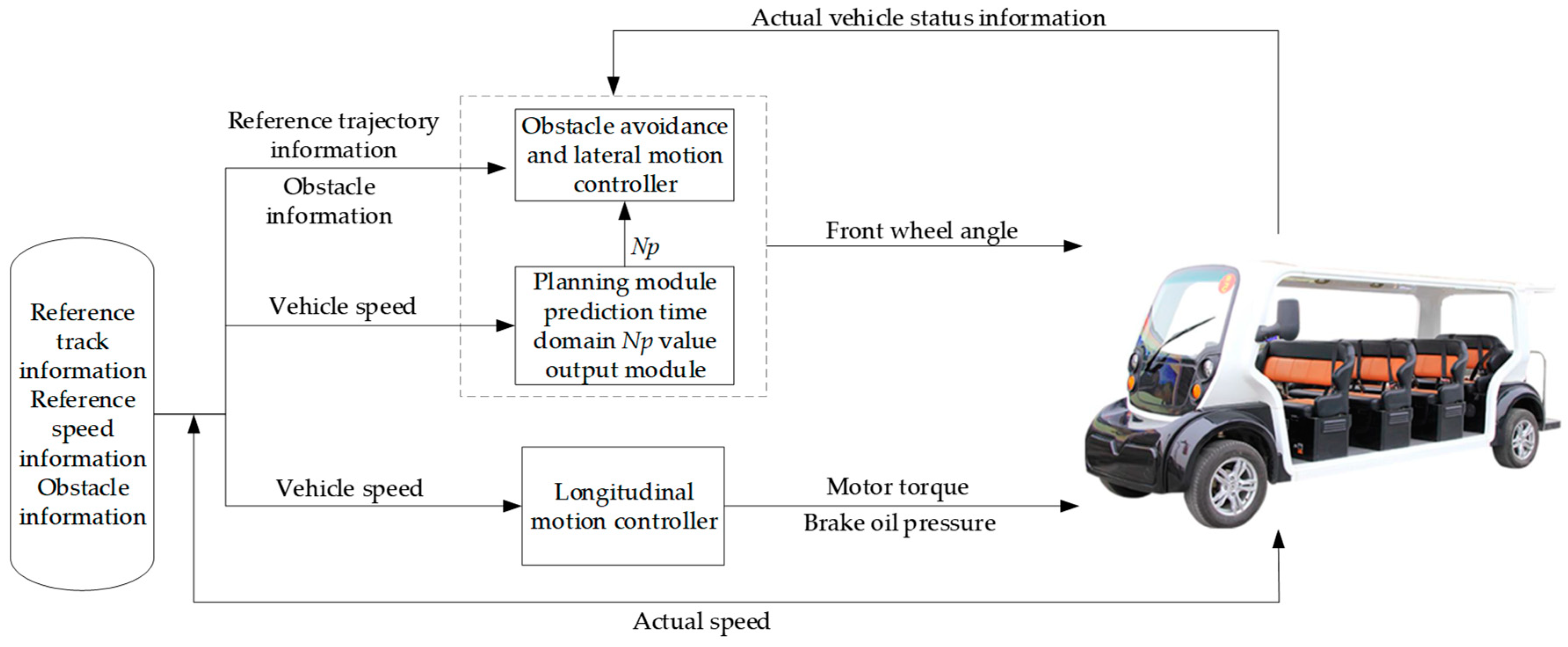
4.3. Coordinated Control Design
5. Simulation Analysis
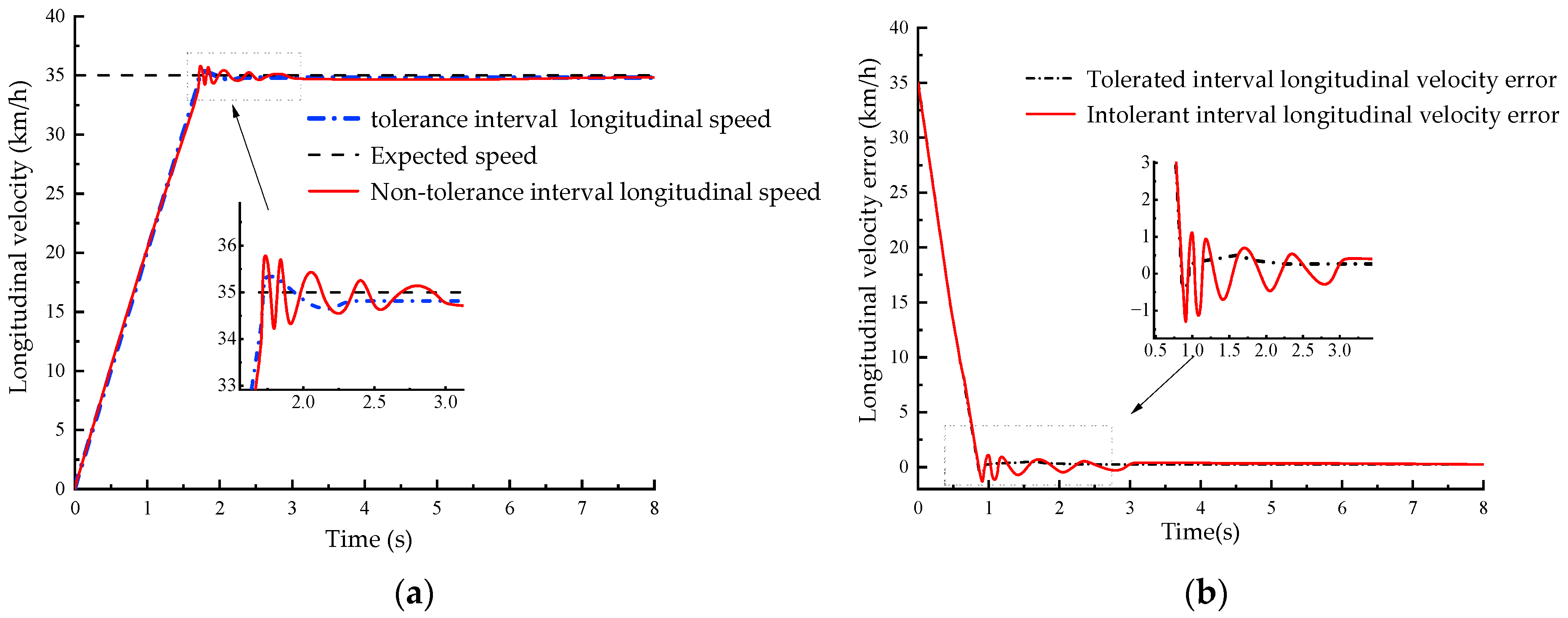
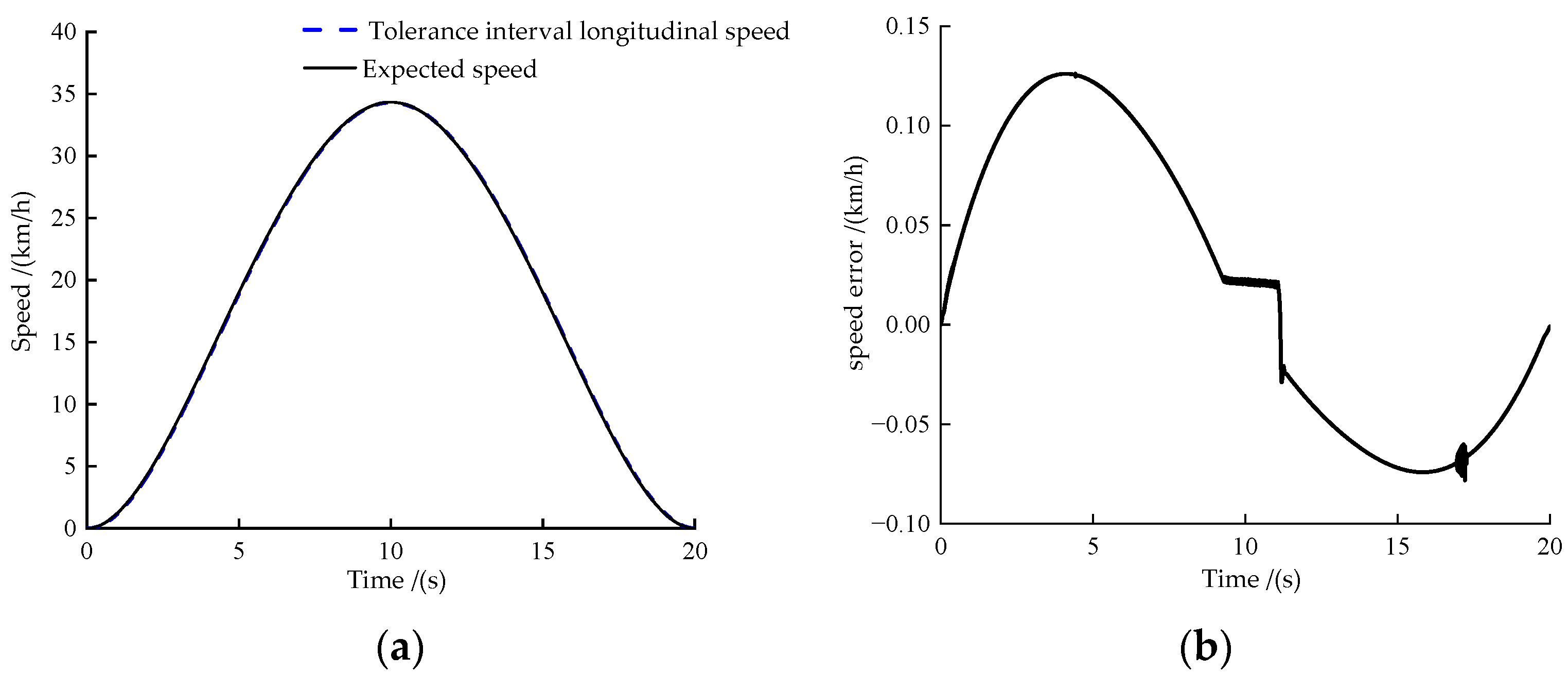
5.1. Longitudinal Motion Simulation Condition
5.2. Lateral Motion Simulation Condition
5.2.1. Condition 1
5.2.2. Condition 2
5.2.3. Condition 3
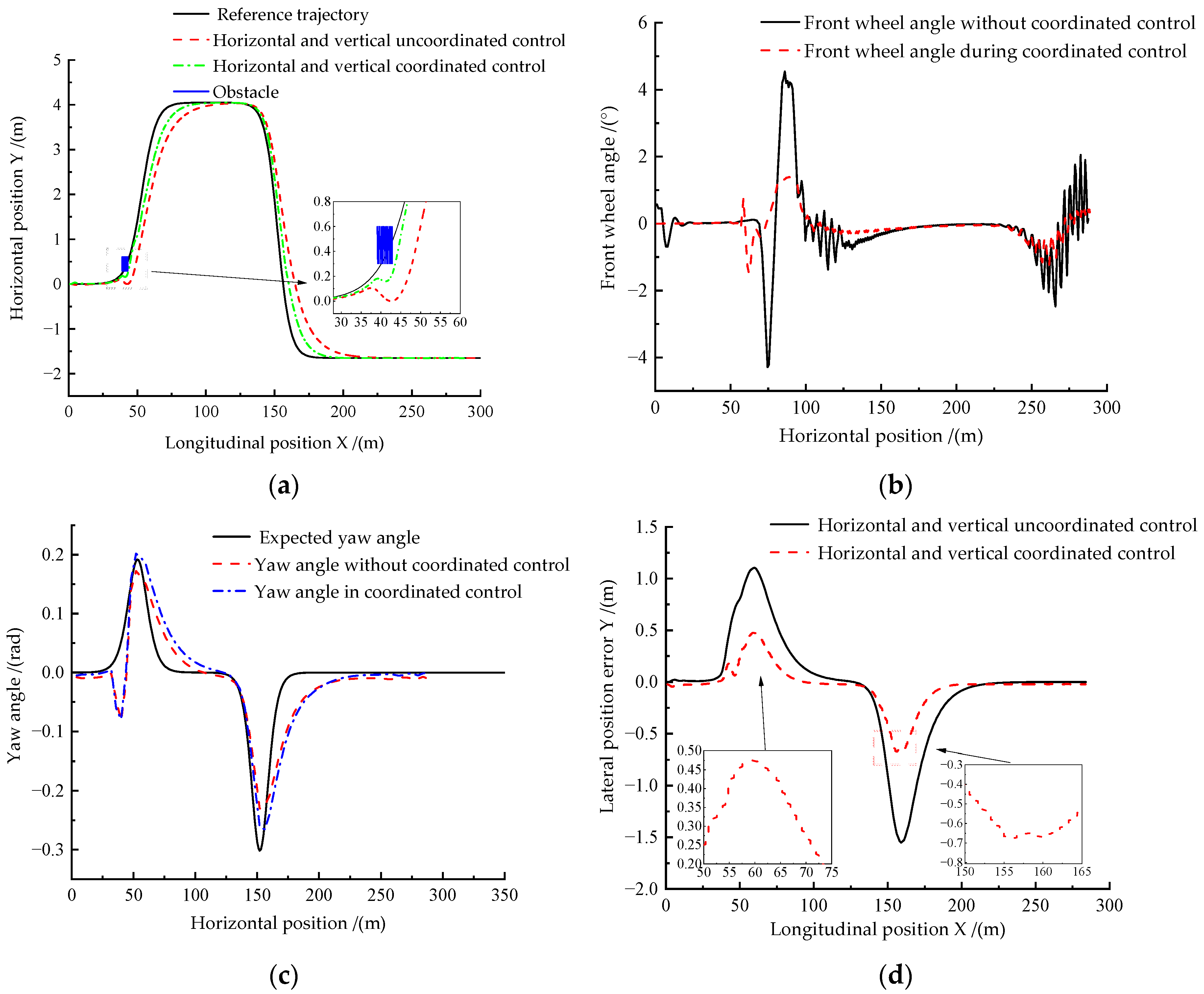
5.3. Coordinated Control of Simulation Conditions
5.3.1. Condition 1
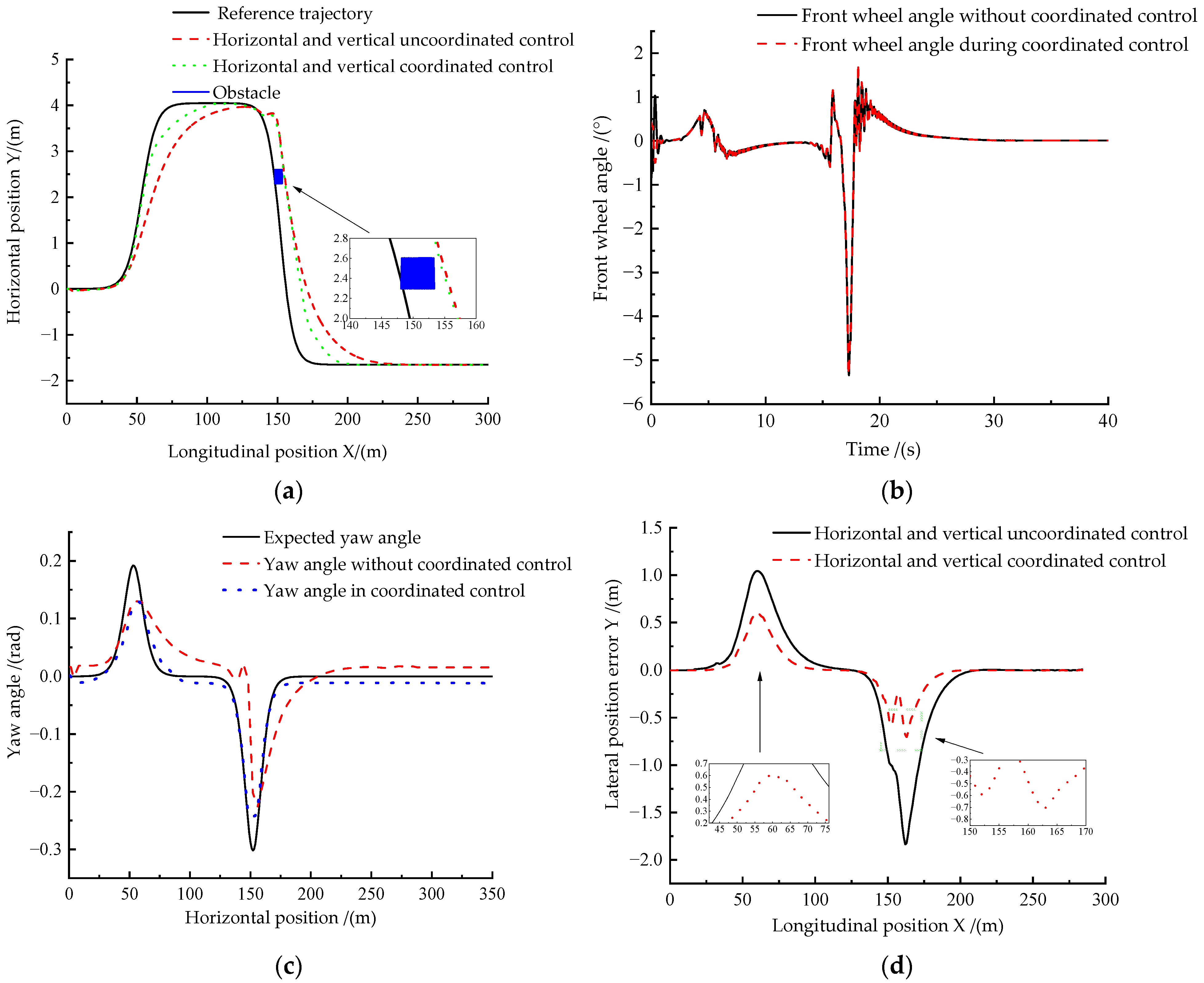
5.3.2. Condition 2
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, F.; Rao, Y. Vision-based intelligent vehicle road recognition and obstacle detection method. Int. J. Pattern Recognit. Artif. Intell. 2020, 34, 2050020. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; An, Y.; Huang, Q.-L.; Cui, Y.-H.; Hu, H.-S. Dynamic path planning of mobile robots using adaptive dynamic programming. Expert Syst. Appl. 2024, 235, 121112. [Google Scholar] [CrossRef]
- Li, Y.; Zhao, J.; Chen, Z.; Xiong, G.; Liu, S. A robot path planning method based on improved genetic algorithm and improved dynamic window approach. Sustainability 2023, 15, 4656. [Google Scholar] [CrossRef]
- Gao, H.; Song, X.; Gao, S. Research on Self-driving Vehicle Path Tracking Adaptive Method Based on Predictive Control. J. Phys. Conf. Ser. 2023, 2501, 012034. [Google Scholar] [CrossRef]
- Macadam, C.C. An Optimal Preview Control for Linear-Systems. J. Dyn. Syst.-Trans. ASME 1980, 102, 188–190. [Google Scholar] [CrossRef]
- MacAdam, C.C.; Johnson, G.E. Application of elementary neural networks and preview sensors for representing driver steering control behaviour. Veh. Syst. Dyn. 1996, 25, 3–30. [Google Scholar] [CrossRef]
- Li, S.; Xu, B.; Hu, M. Multi-point preview path tracking method for articulated vehicles based on dynamic model predictive control. Automot. Eng. 2021, 43, 1187–1194. [Google Scholar] [CrossRef]
- Li, W.; Yu, S.; Tan, L.; Li, Y.; Chen, H.; Yu, J. Integrated control of path tracking and handling stability for autonomous ground vehicles with four-wheel steering. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023. [Google Scholar] [CrossRef]
- Guo, J.; Luo, Y.; Li, K.; Guo, L. Adaptive dynamic surface longitudinal tracking control of autonomous vehicles. IET Intell. Transp. Syst. 2019, 13, 1272–1280. [Google Scholar] [CrossRef]
- Tang, C.; Zhao, Y.; Zhou, S. Research on trajectory tracking Control method of Intelligent vehicle. J. Northeast. Univ. (Nat. Sci. Ed.) 2020, 41, 1297. [Google Scholar] [CrossRef]
- Elias, G.H.S.; Al-Moadhen, A.; Kamil, H. Optimizing the PID controller to control the longitudinal motion of autonomous vehicles. AIP Conf. Proc. 2023, 2591, 040045. [Google Scholar] [CrossRef]
- Razmjooei, H.; Palli, G.; Nazari, M. Disturbance observer-based nonlinear feedback control for position tracking of electro-hydraulic systems in a finite time. Eur. J. Control 2022, 67, 100659. [Google Scholar] [CrossRef]
- Waschl, H.; Kolmanovsky, I.; Willems, F. Control Strategies for Advanced Driver Assistance Systems and Autonomous Driving Functions; Lecture Notes in Control and Information Sciences; Springer International: Cham, Switzerland, 2019; Volume 8. [Google Scholar] [CrossRef]
- Ye, N.; Wang, D.; Dai, Y. Enhancing Autonomous Vehicle Lateral Control: A Linear Complementarity Model-Predictive Control Approach. Appl. Sci. 2023, 13, 10809. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A survey of motion planning and control techniques for self-driving urban vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef]
- Zhao, Z.; Chang, H.; Wu, C. Adaptive Fuzzy Command Filtered Tracking Control for Flexible Robotic Arm with Input Dead-Zone. Appl. Sci. 2023, 13, 10812. [Google Scholar] [CrossRef]
- Ma, S.; Gong, P. Simulation and experiment of intelligent vehicle lateral control based on Fuzzy PID algorithm. In Proceedings of the 2023 IEEE International Conference on Control, Electronics and Computer Technology (ICCECT), Jilin, China, 28–30 April 2023; pp. 759–764. [Google Scholar] [CrossRef]
- Varshney, A.; Goyal, V. Re-evaluation on fuzzy logic controlled system by optimizing the membership functions. Mater. Today Proc. 2023. [Google Scholar] [CrossRef]
- Quan, L.; Chang, R.; Guo, C.; Li, B. Vehicle State Joint Estimation Based on Lateral Stiffness. Sensors 2023, 23, 8960. [Google Scholar] [CrossRef]
- Wang, W.; Li, G.; Liu, S.; Yang, Q. Trajectory Planning of a Semi-Trailer Train Based on Constrained Iterative LQR. Appl. Sci. 2023, 13, 10614. [Google Scholar] [CrossRef]
- Németh, B.; Gáspár, P. Hierarchical motion control strategies for handling interactions of automated vehicles. Control Eng. Pract. 2023, 136, 105523. [Google Scholar] [CrossRef]
- Li, S.; Ding, X. Intelligent vehicle trajectory Planning based on quintic Polynomials. J. Jiangsu Univ. (Nat. Sci. Ed.)/Jiangsu Daxue Xuebao (Ziran Kexue Ban) 2023, 44, 392–398. [Google Scholar] [CrossRef]
- Yu, L.; Wang, K.; Zhang, Q.; Zhang, J. Trajectory planning of a redundant planar manipulator based on joint classification and particle swarm optimization algorithm. Multibody Syst. Dyn. 2020, 50, 25–43. [Google Scholar] [CrossRef]
- Liu, X.; Liu, F.; Guo, J. Research on stability of high-speed autonomous vehicles based on linear time-varying model predictive control. Int. J. Veh. Des. 2023, 91, 360–383. [Google Scholar] [CrossRef]
- Wang, Y.; Li, J.; Wang, X.; Jin, C.; Yin, X. Development and Test of steering Angle measuring device for wheeled Tractor. J. China Agric. Univ. 2022, 27, 203–211. [Google Scholar] [CrossRef]
- Linden, M.; Eckstein, L.; Schlupek, M.; Duning, R. Influence of Wheel Bending Stiffness on Lateral Tire Characteristics. In Proceedings of the 12th International Munich Chassis Symposium 2021: Chassis Tech Plus, Munich, Germany, 29–30 June 2021; pp. 564–582. [Google Scholar] [CrossRef]
- Xia, Q.; Te, L.; Chen, L.; Xu, X.; Cai, Y. Vehicle Sideslip Angle Estimation Method Based on Redundant Information Fusion. Automot. Eng. 2022, 44, 280–289. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| e | ec | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO |
| NM | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO |
| NS | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO |
| ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO | ZO, ZO, ZO |
| PS | PM, NB, PS | PM, NM, NS | PM, NS, NM | PS, NS, NM | ZO, ZO, NS | NS, PS, NS | NS, PS, ZO |
| PM | PB, NB, PS | PB, NB, NS | PM, NM, NB | PS, NS, NM | PS, NS, NM | ZO, ZO, NS | NS, ZO, ZO |
| PB | PB, NB, PS | PB, NB, NS | PM, NM, NB | PM, NM, NB | PS, NS, NB | PB, NB, NS | PB, NB, NS |
| Arguments (Units) | Numerical Value |
|---|---|
| Vehicle mass (kg) | 1000 |
| The separation between the front axis and the center of mass (mm) | 1650 |
| The separation between the back axis and the center of mass (mm) | 2110 |
| Length of the ferry vehicle (mm) | 5224 |
| Width of the ferry vehicle (mm) | 1500 |
| Height of the ferry vehicle (mm) | 1890 |
| Ferry vehicle wheel gauge (mm) | 1400 |
| Vehicle centroid height (mm) | 450 |
| Vehicle’s front wheel radius (mm) | 310.75 |
| Vehicle’s rear wheel radius (mm) | 310.75 |
| The tractor’s moment of inertia about the -axis (kg·m2) | 750 |
| Control Arguments (Units) | Numerical Value |
|---|---|
| Control time domain, | 2 |
| Sampling period, | 0.1 |
| Input quantity | 6 |
| Output quantity | 10 |
| Weight coefficient of obstacle avoidance | 20 |
| Number of points sampled for obstacles | 12 |
| Control Arguments (Units) | Numerical Value |
|---|---|
| Prediction time domain, | 25 |
| Control time domain, | 15 |
| Front wheel angle, | −20°~20° |
| Weight matrix, | 1.1 × 105 |
| Number of state quantities | 6 |
| Number of control quantities | 1 |
| Relaxation factor, | 1000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, G.; Zhang, Z. Research on Obstacle Avoidance Replanning and Trajectory Tracking Control Driverless Ferry Vehicles. Appl. Sci. 2024, 14, 3216. https://doi.org/10.3390/app14083216
Li X, Li G, Zhang Z. Research on Obstacle Avoidance Replanning and Trajectory Tracking Control Driverless Ferry Vehicles. Applied Sciences. 2024; 14(8):3216. https://doi.org/10.3390/app14083216
Chicago/Turabian StyleLi, Xiang, Gang Li, and Zhiqiang Zhang. 2024. "Research on Obstacle Avoidance Replanning and Trajectory Tracking Control Driverless Ferry Vehicles" Applied Sciences 14, no. 8: 3216. https://doi.org/10.3390/app14083216
APA StyleLi, X., Li, G., & Zhang, Z. (2024). Research on Obstacle Avoidance Replanning and Trajectory Tracking Control Driverless Ferry Vehicles. Applied Sciences, 14(8), 3216. https://doi.org/10.3390/app14083216