

Hybrid Strategy Improved Beetle Antennae Search Algorithm and Application

Abstract
:1. Introduction
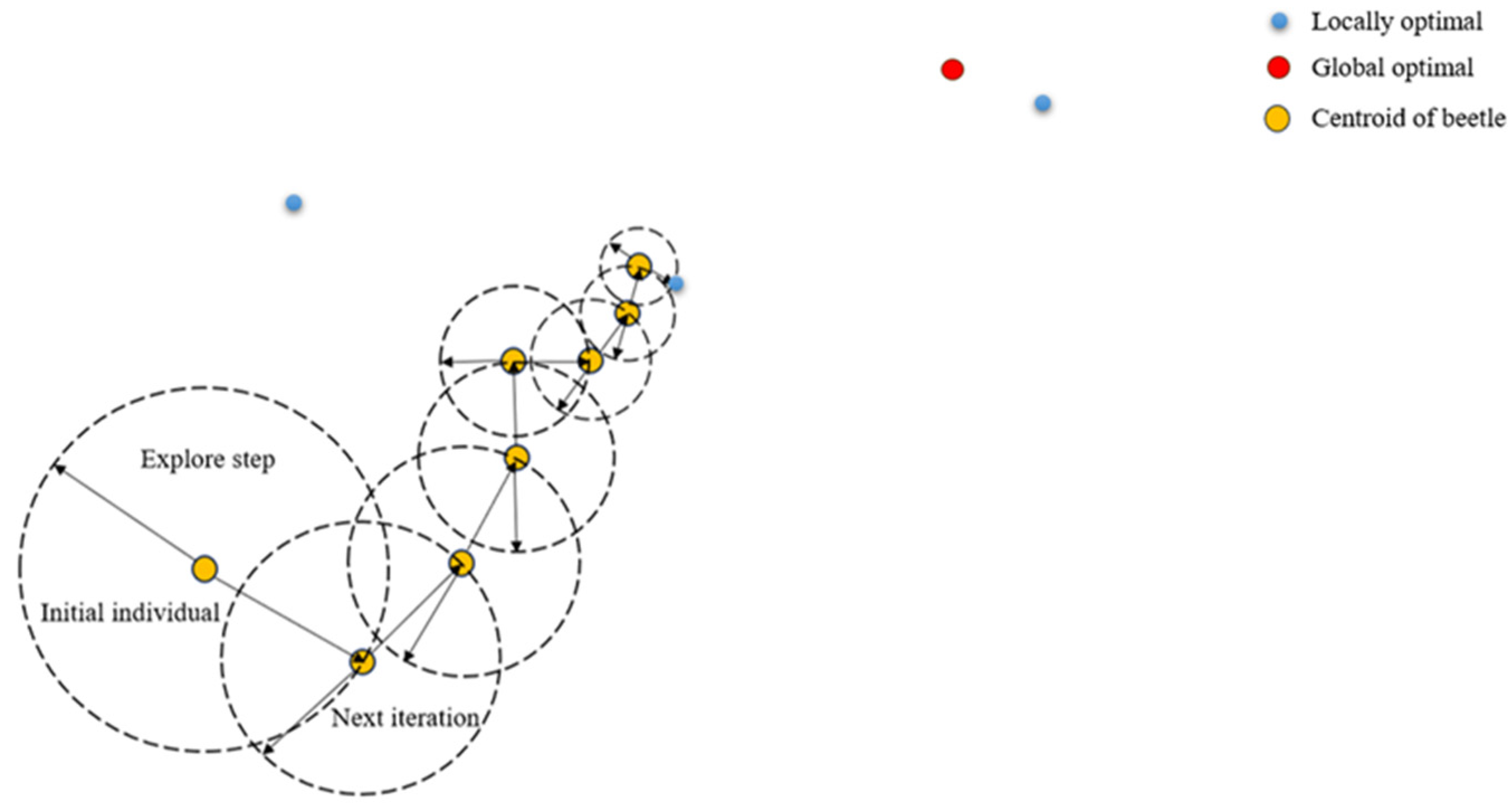
2. Beetle Antennae Search algorithm
- 1.
- Setting the direction of antennae whiskers . It is represented by a random unit vector and normalized by [25],
- 2.
- Setting the step factor. is the exploration step length at the iteration, and the step length mainly determines the search capability of antennae whiskers [25],
- 3.
- Establishing the location coordinates of the left and right antennae whiskers [25].
- 4.
- Updating the mass center position of the new antennae.
- 5.
- The location of the antennae at the next iteration (the iteration) is selected based on the food smell concentration of the antennae’s left and right whiskers (the magnitude of the objective function value ) [25]:
3. Hybrid Strategy Improved Beetle Antennae Search Algorithm
3.1. Adaptive Step Strategy
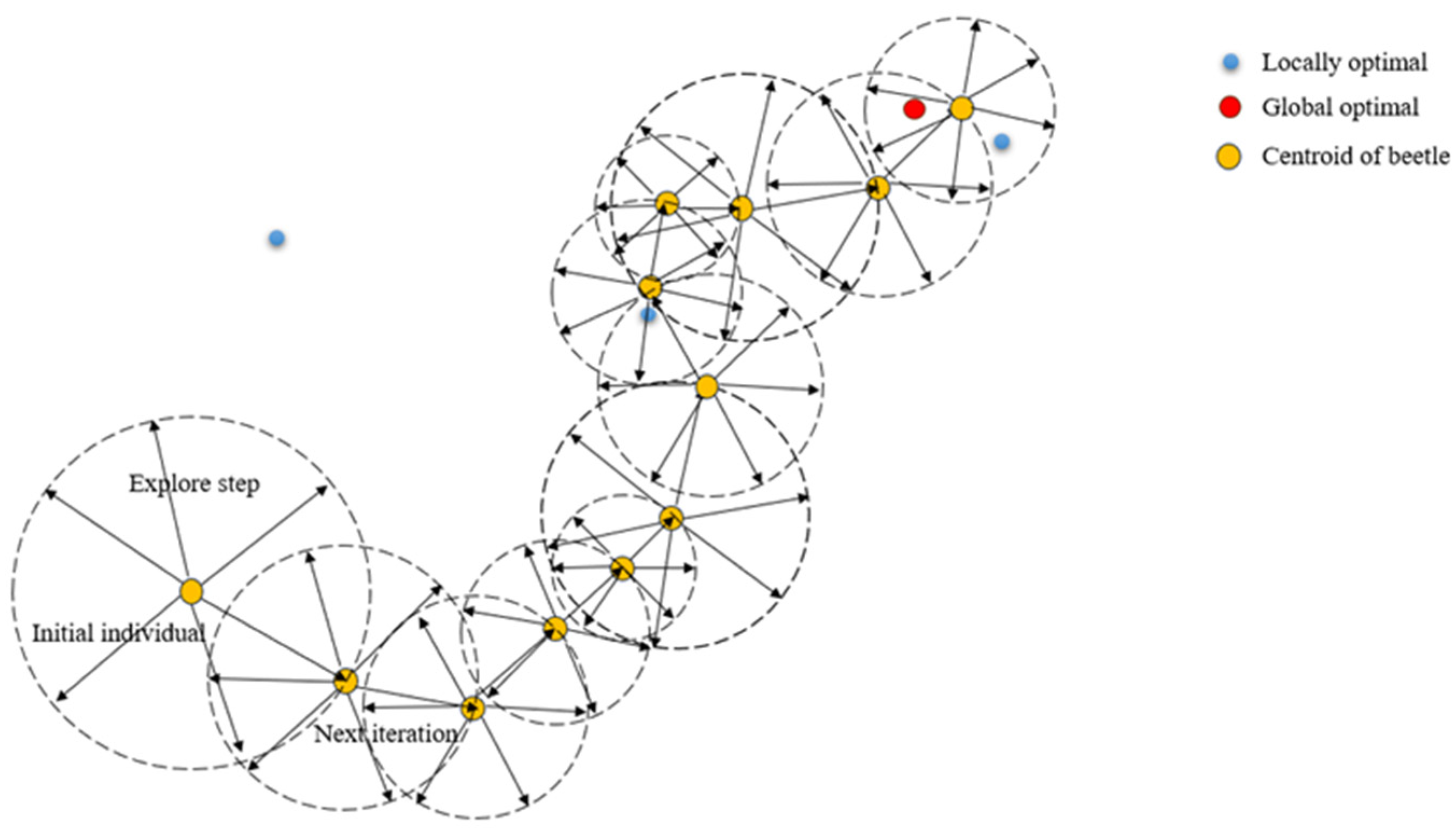
3.2. Multi-Directional Exploration Strategy
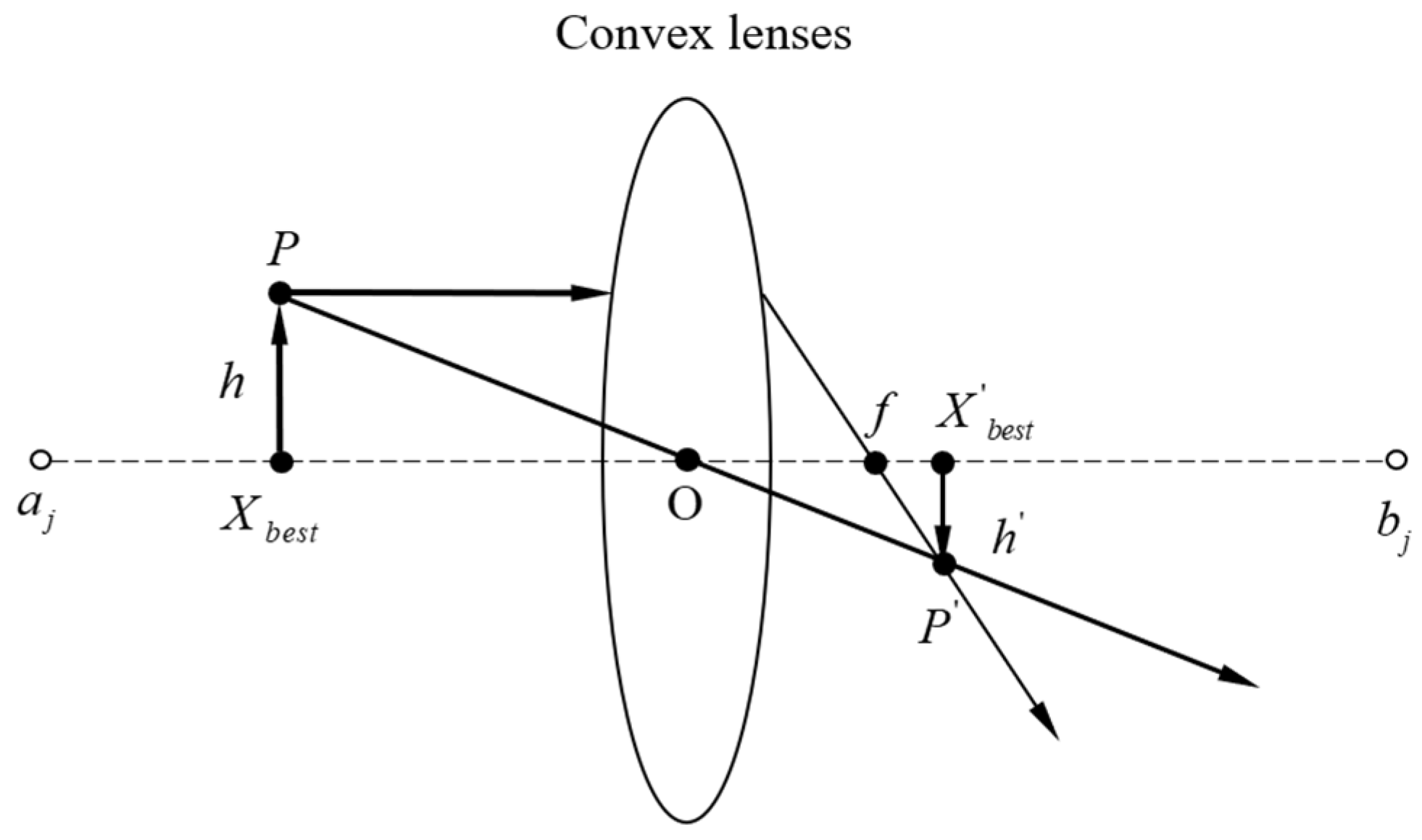
3.3. Lens Opposition-Based Learning Strategy
| Algorithm 1: HSBAS algorithm |
| Begin Input: Fitness function Initialize the parameters Output: the best solution x* and the best value of fitness function. While (t < Tmax do If , then Generate the step according to (6) End Generate the direction vector unit according to (7) Generate multiple explore direction randomly according to (8) If then, End If is an even number, Lens Opposition-Based Learning according to (10) Compare the Fitness function value; update the best value and position. if , then, End End End Update sensing diameter d and step length with decreasing functions (4) and (5), respectively; End Return |
4. Simulation Experiment and Analysis
4.1. Algorithm Data Comparison
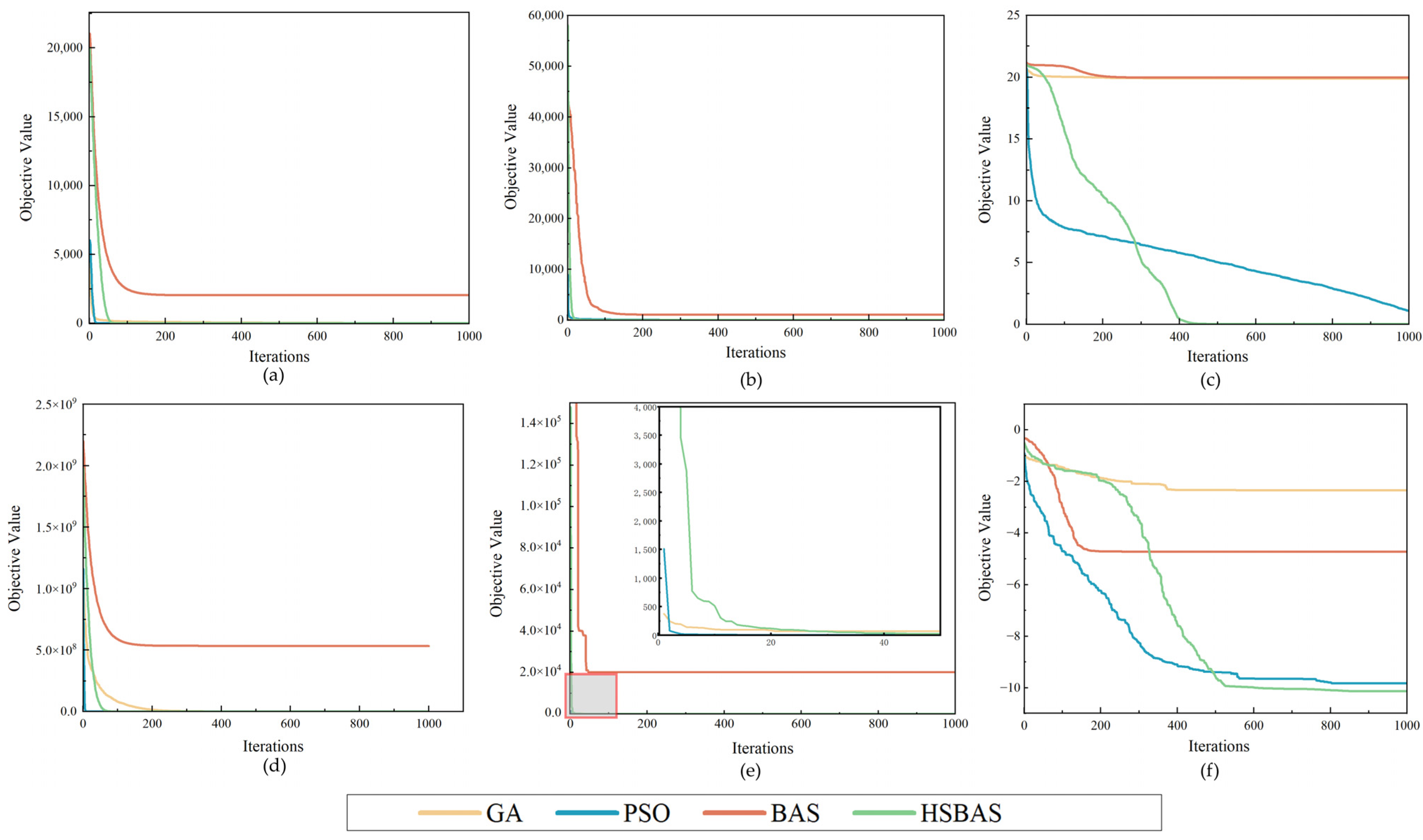
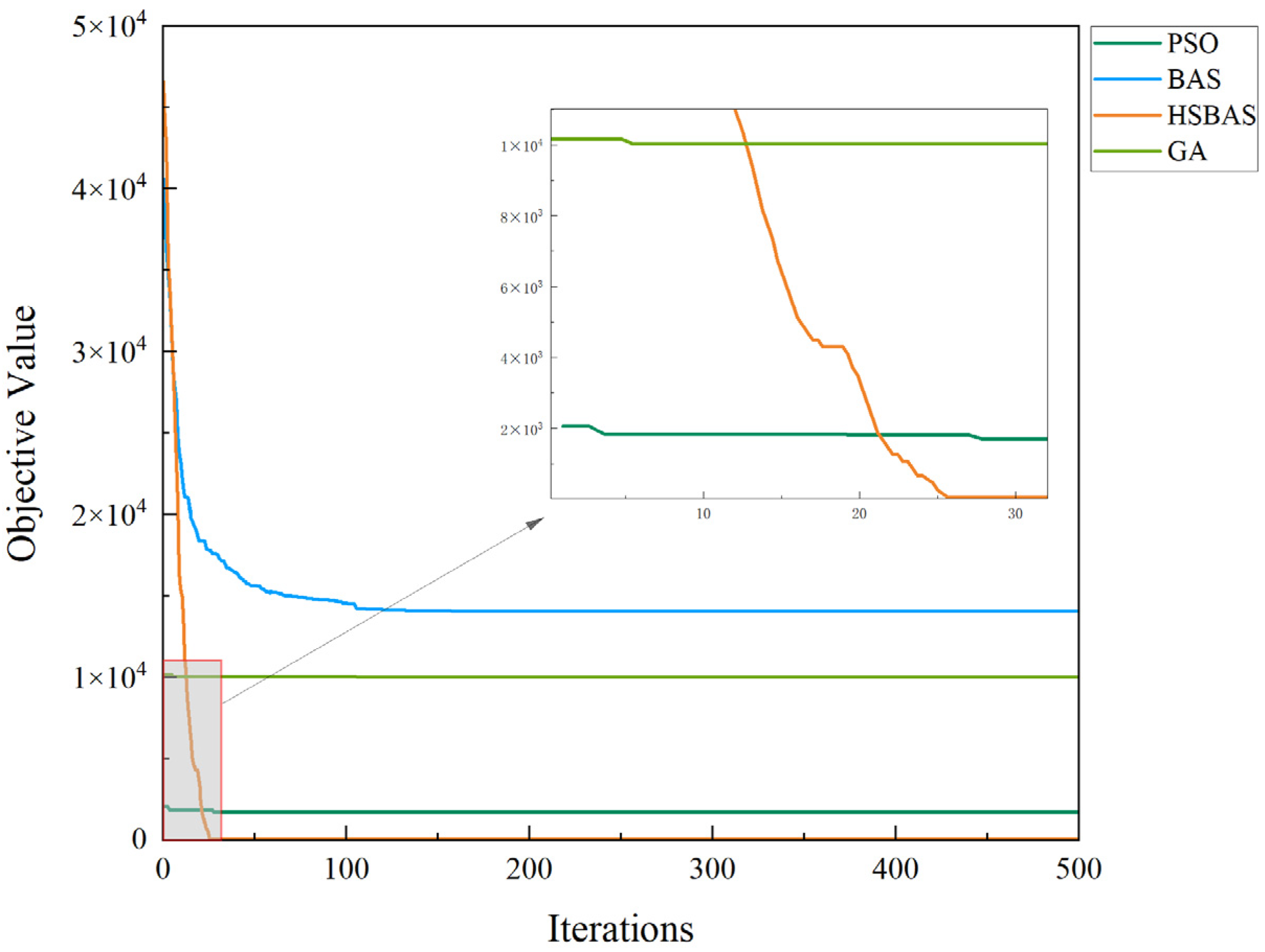
4.2. Convergence Analysis of Algorithms
4.3. Computational Complexity Analysis of Algorithms
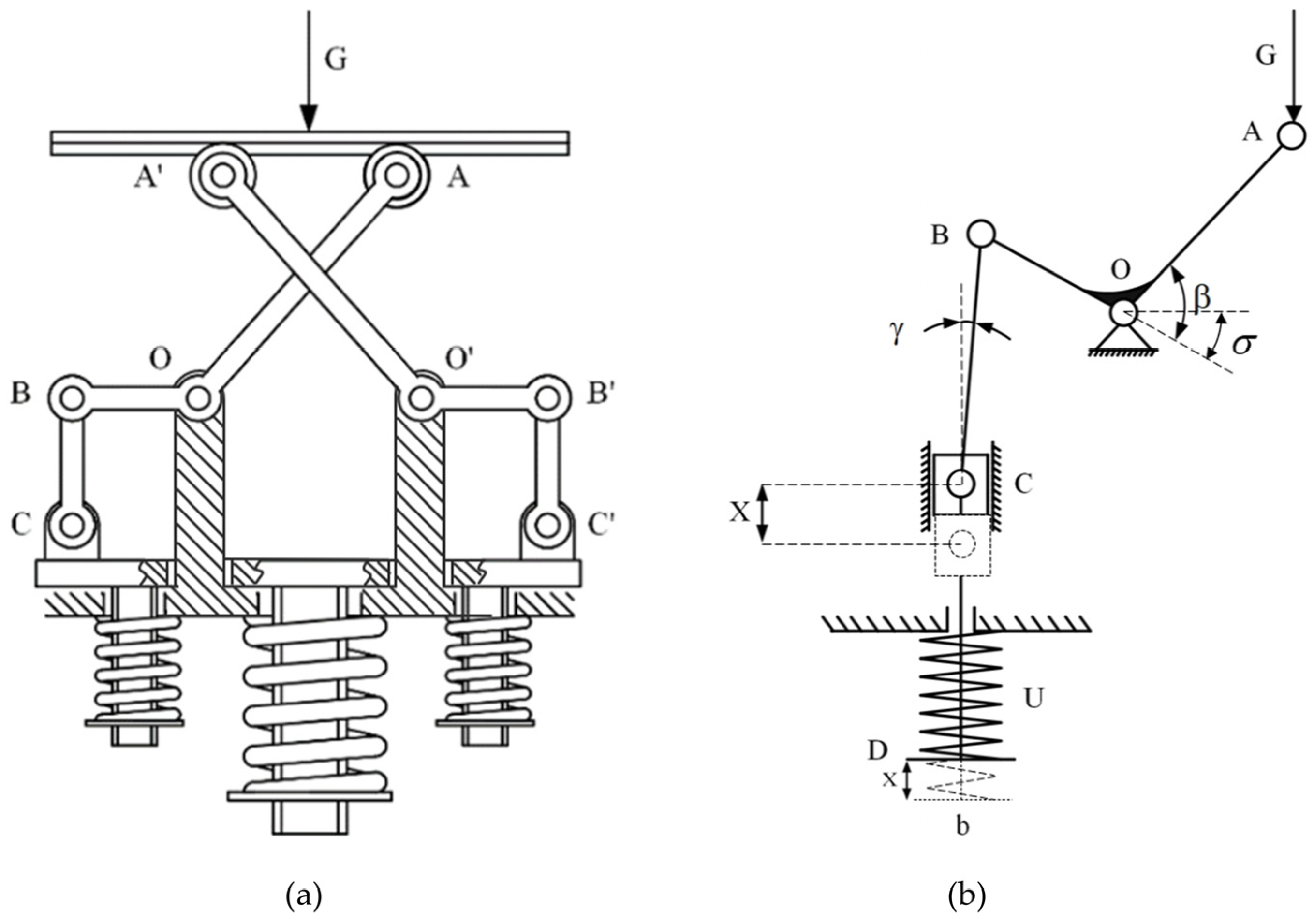
5. Application to Mechanical Module Design
5.1. Physical and Mathematical Modeling of the Height Compensation Module
5.2. Constraint Treatment
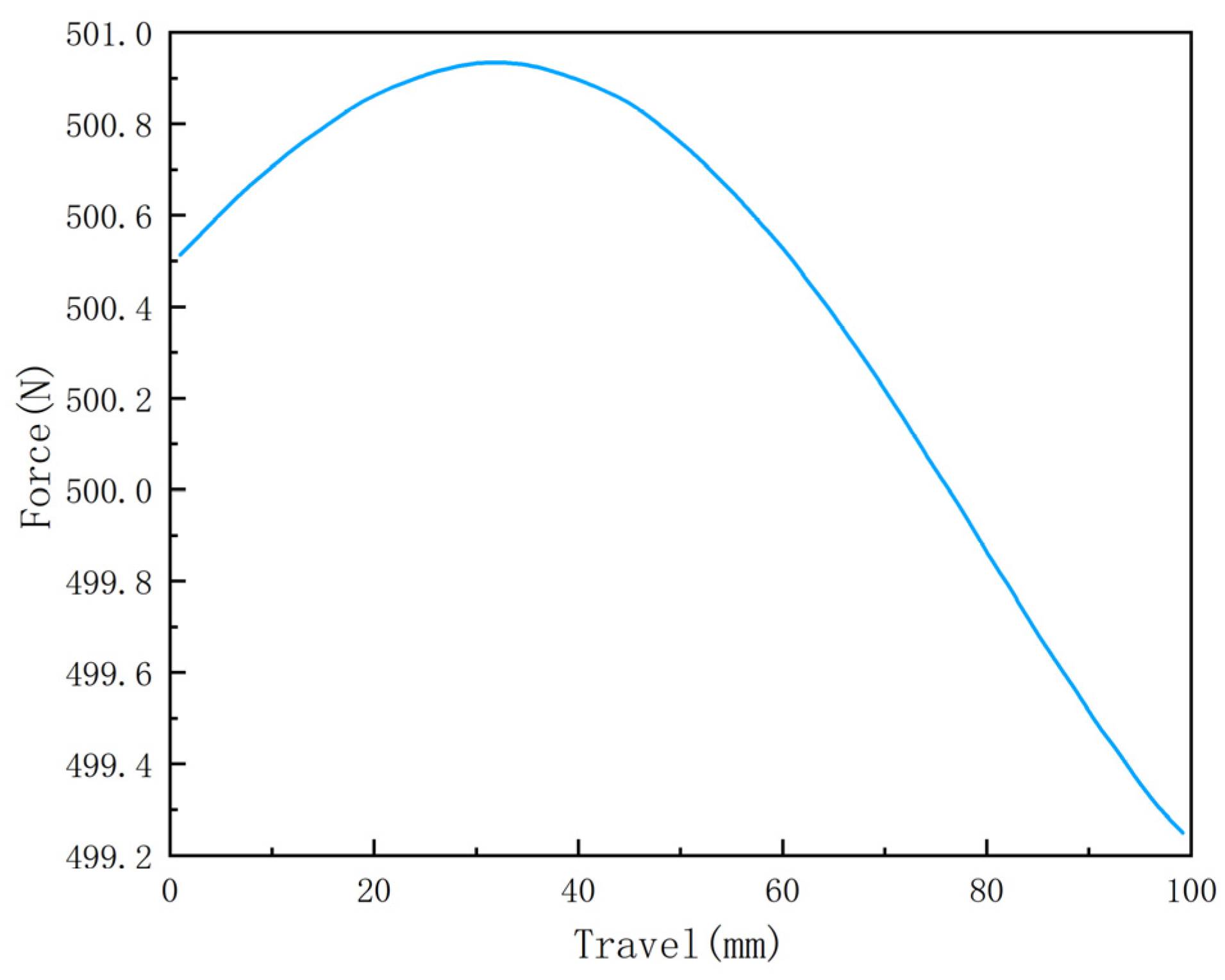
5.3. Parameter Optimization of Altitude Compensation Modules Using HSBAS
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kaleka, K.K.; Kaur, A.; Kumar, V. A conceptual comparison of metaheuristic algorithms and applications to engineering design problems. Int. J. Intell. Inf. Database Syst. 2020, 13, 278–306. [Google Scholar] [CrossRef]
- Eesa, A.S.; Hassan, M.M.; Arabo, W.K. Application of optimization algorithms to engineering design problems and discrepancies in mathematical formulas. Appl. Soft Comput. 2023, 140, 110252. [Google Scholar] [CrossRef]
- Yu, L.; Ren, J.; Zhang, J. A Quantum-Based Beetle Swarm Optimization Algorithm for Numerical Optimization. Appl. Sci. 2023, 13, 3179. [Google Scholar] [CrossRef]
- Rajmohan, S.; Elakkiya, E.; Sreeja, S. Multi-cohort whale optimization with search space tightening for engineering optimization problems. Neural Comput. Appl. 2023, 35, 8967–8986. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Xu, B. Convergence analysis of beetle antennae search algorithm and its applications. Soft Comput. 2021, 25, 10595–10608. [Google Scholar] [CrossRef]
- Liao, L.; Yang, H. Review of Beetle Antennae Search. Comput. Eng. Appl. 2021, 57, 54–64. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, G.; Huang, Y.; Aslani, F.; Nener, B.J. Modelling uniaxial compressive strength of lightweight self-compacting concrete using random forest regression. Constr. Build. Mater. 2019, 210, 713–719. [Google Scholar] [CrossRef]
- Ji, L.; Cao, Z.; Hong, Q.; Chang, X.; Fu, Y.; Shi, J.; Mi, Y.; Li, Z. An improved inverse-time over-current protection method for a microgrid with optimized acceleration and coordination. Energies 2020, 13, 5726. [Google Scholar] [CrossRef]
- Wang, P.; Gao, Y.; Wu, M.; Zhang, F.; Li, G.; Qin, C. A denoising method for fiber optic gyroscope based on variational mode decomposition and beetle swarm antenna search algorithm. Entropy 2020, 22, 765. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Li, G.; Zhang, J. Developing hybrid machine learning models for estimating the unconfined compressive strength of jet grouting composite: A comparative study. Appl. Sci. 2020, 10, 1612. [Google Scholar] [CrossRef]
- Khan, A.H.; Cao, X.; Li, S.; Katsikis, V.N.; Liao, L. BAS-ADAM: An ADAM based approach to improve the performance of beetle antennae search optimizer. IEEE/CAA J. Autom. Sin. 2020, 7, 461–471. [Google Scholar] [CrossRef]
- Wang, J.; Chen, H. BSAS: Beetle swarm antennae search algorithm for optimization problems. arXiv 2018, arXiv:1807.10470. [Google Scholar]
- Li, Q.; Wei, A.; Zhang, Z. Application of economic load distribution of power system based on BAS-PSO. IOP Conf. Ser. Mater. Sci. Eng. 2019, 490, 072056. [Google Scholar] [CrossRef]
- Fan, Q.; Huang, H.; Li, Y.; Han, Z.; Hu, Y.; Huang, D. Beetle antenna strategy based grey wolf optimization. Expert Syst. Appl. 2021, 165, 113882. [Google Scholar] [CrossRef]
- Ye, K.; Shu, L.; Xiao, Z.; Li, W. An improved beetle swarm antennae search algorithm based on multiple operators. Soft Comput. 2024, 1–16. [Google Scholar] [CrossRef]
- Zhao, Q.; Zheng, Z.J. Computational and Mathematical Methods in Medicine Prediction of COVID-19 in BRICS Countries: An Integrated Deep Learning Model of CEEMDAN-R-ILSTM-Elman. Comput. Math. Methods Med. 2022, 2022, 1566727. [Google Scholar] [CrossRef] [PubMed]
- Liao, L.; Ouyang, Z. Beetle antennae search based on quadratic interpolation. Appl. Res. Comput. 2021, 38, 745–750. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhang, Z.; Man, W.; Tong, X.; Qiu, J.; Li, F. A new beetle antennae search algorithm for multi-objective energy management in microgrid. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1599–1603. [Google Scholar]
- Xie, S.; Chu, X.; Zheng, M.; Liu, C. Ship predictive collision avoidance method based on an improved beetle antennae search algorithm. Ocean Eng. 2019, 192, 106542. [Google Scholar] [CrossRef]
- Li, X.; Jiang, H.; Niu, M.; Wang, R. An enhanced selective ensemble deep learning method for rolling bearing fault diagnosis with beetle antennae search algorithm. Mech. Syst. Signal Process. 2020, 142, 106752. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, Y.; Li, G.; Wang, Y.; Sun, J.; Li, J. Machine-learning-assisted shear strength prediction of reinforced concrete beams with and without stirrups. Eng. Comput. 2022, 38, 1293–1307. [Google Scholar] [CrossRef]
- Khan, A.H.; Li, S.; Luo, X. Obstacle Avoidance and Tracking Control of Redundant Robotic Manipulator: An RNN based Metaheuristic Approach. IEEE Trans. Ind. Inform. 2020, 16, 4670–4680. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, Z.; Zu, H.; Zhang, X. An optimized RBF neural network based on beetle antennae search algorithm for modeling the static friction in a robotic manipulator joint. Math. Probl. Eng. 2020, 2020, 5839195. [Google Scholar] [CrossRef]
- Bullnheimer, B. A new rank based version of the ant system: A computational study. Cent. Eur. J. Oper. Res. Econ 1999, 7, 25–38. [Google Scholar]
- Jiang, X.; Li, S.J. BAS: Beetle antennae search algorithm for optimization problems. arXiv 2017, arXiv:1710.10724. [Google Scholar] [CrossRef]
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M. Opposition versus randomness in soft computing techniques. Appl. Soft Comput. 2008, 8, 906–918. [Google Scholar] [CrossRef]
- Yue, Y.; Zhou, Y.; Xu, L.; Zhao, D. Optimal Defense Strategy Selection Algorithm Based on Reinforcement Learning and Opposition-Based Learning. Appl. Sci. 2022, 12, 9594. [Google Scholar] [CrossRef]
- Long, W.; Wu, T.-B.; Tang, M.-Z.; Xu, M.; Ca, S.-H. Grey wolf optimizer algorithm based on lens imaging learning strategy. Acta Autom. Sin. 2020, 46, 2148–2164. [Google Scholar] [CrossRef]
- Xu, J.; Xu, S.; Zhang, L.; Zhou, C.; Han, Z. A particle swarm optimization algorithm based on diversity-driven fusion of opposing phase selection strategies. Complex Intell. Syst. 2023, 9, 6611–6643. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, H.; Wang, J.; Li, B.; Hou, P.; Yang, Z. Salp swarm algorithm based on orthogonal refracted opposition-based learning. J. Harbin Inst. Technol. 2022, 54, 122–136. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Test Function Name | Dimension | Search Area | Theoretical Optimality |
|---|---|---|---|---|
| Sphere | 30 | [−100,100] | 0 | |
| Schwefel 2.22 | 30 | [−10,10] | 0 | |
| Rosenbrock | 30 | [−5,5] | 0 | |
| Rastrigin | 30 | [−5.12,5.12] | 0 | |
| Penalized | 30 | [−50,50] | 0 | |
| Ackley’s | 30 | [−32,32] | 0 | |
| Generalized Penalized | 30 | [−32,32] | 0 | |
| Six-Hump Camel-Back | 2 | [−5,5] | −1.0316 | |
| Goldstein–Price | 2 | [−2,2] | 3 | |
| Hartman | 3 | [1,3] | −3.86 | |
| Shekel’s Family | 4 | [0,10] | −10.5365 |
| Problem | Statistical Results | GA | PSO | BAS | HSBAS |
|---|---|---|---|---|---|
| Ave | 1.93 × 10−4 | 1.11 × 10−16 | 2.04 × 103 | 2.91 × 10−22 | |
| STD | 2.17× 10−4 | 2.06 × 10−16 | 1.97 × 103 | 1.13 × 10−22 | |
| Rank | 3 | 2 | 4 | 1 | |
| Ave | 4.63 × 10−4 | 1.05 × 10−12 | 18.66 | 3.03 × 10−12 | |
| STD | 7.08 × 10−4 | 6.70 × 10−12 | 18.78 | 7.55 × 10−13 | |
| Rank | 3 | 2 | 4 | 1 | |
| Ave | 1.35 | 1.38 | 13.29 | 0.45 | |
| STD | 1.49 | 0.85 | 114.31 | 0.57 | |
| Rank | 3 | 2 | 4 | 1 | |
| Ave | 253.60 | 1.43 | 159.20 | 9.44 | |
| STD | 585.90 | 1.00 | 320.37 | 4.37 | |
| Rank | 4 | 1 | 3 | 2 | |
| Ave | 6.63 | 0.0124 | 2.24e8 | 1.07 | |
| STD | 3.75 | 0.0268 | 1.57e8 | 0.49 | |
| Rank | 3 | 1 | 4 | 2 | |
| Ave | 19.79 | 1.11 | 19.85 | 2.32 × 10−2 | |
| STD | 0.44 | 0.52 | 0.25 | 3.71 × 10−2 | |
| Rank | 4 | 2 | 3 | 1 | |
| Ave | 17.12 | 0.11 | 5.34 × 108 | 4.74 × 10−3 | |
| STD | 9.47 | 0.07 | 2.52 × 108 | 6.15 × 10−3 | |
| Rank | 3 | 2 | 4 | 2 | |
| Ave | −0.97 | −1.0316 | −1.0013 | −1.0316 | |
| STD | 9.31 × 10−2 | 6.52 × 10−16 | 0.12271 | 4.61 × 10−16 | |
| Rank | 4 | 2 | 3 | 1 | |
| Ave | 52.41 | 3 | 8.62e3 | 3 | |
| STD | 111.07 | 1.54 × 10−15 | 4.67 × 104 | 2.21 × 10−16 | |
| Rank | 3 | 2 | 4 | 1 | |
| Ave | −1.66 | −3.27 | −0.35 | −3.35 | |
| STD | 0.44 | 5.99 × 10−2 | 0.68 | 6.36 × 10−2 | |
| Rank | 3 | 2 | 4 | 1 | |
| Ave | −2.35 | −9.8216 | −4.73 | −10.13 | |
| STD | 0.75 | 2.19 | 3.59 | 0.59 | |
| Rank | 4 | 2 | 3 | 1 | |
| Average Rank | 3.36 | 1.82 | 3.64 | 1.27 | |
| Final Rank | 3 | 2 | 4 | 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shan, X.; Lu, S.; Ye, B.; Li, M. Hybrid Strategy Improved Beetle Antennae Search Algorithm and Application. Appl. Sci. 2024, 14, 3286. https://doi.org/10.3390/app14083286
Shan X, Lu S, Ye B, Li M. Hybrid Strategy Improved Beetle Antennae Search Algorithm and Application. Applied Sciences. 2024; 14(8):3286. https://doi.org/10.3390/app14083286
Chicago/Turabian StyleShan, Xiaohang, Shasha Lu, Biqing Ye, and Mengzheng Li. 2024. "Hybrid Strategy Improved Beetle Antennae Search Algorithm and Application" Applied Sciences 14, no. 8: 3286. https://doi.org/10.3390/app14083286
APA StyleShan, X., Lu, S., Ye, B., & Li, M. (2024). Hybrid Strategy Improved Beetle Antennae Search Algorithm and Application. Applied Sciences, 14(8), 3286. https://doi.org/10.3390/app14083286