
Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers



Abstract
:1. Introduction
2. Literature Review
3. Mathematical Modelling Approach and Quadcopter Controller Design for Smart Agriculture Applications
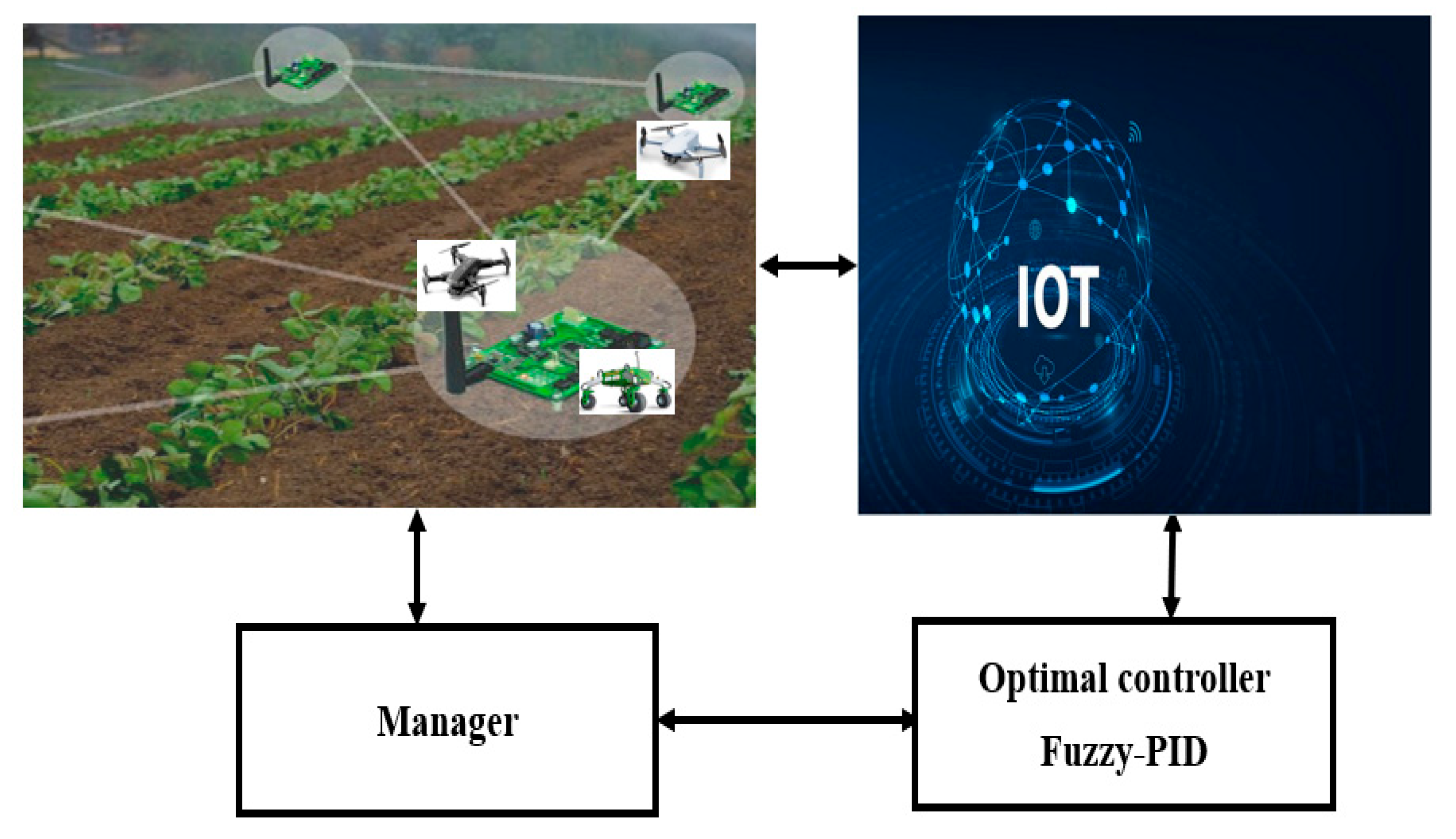
3.1. The Working Principles of Aerial Vehicle Guided Agriculture System
3.2. Mathematical Modeling of Quadcopter Motion
- ➢
- The structure is rigid
- ➢
- The structure is axis-symmetrical
- ➢
- The center of gravity and the body-fixed frame origin coincide
- ➢
- The propellers are rigid
- ➢
- Trust and drag are proportional to the square of the propeller’s speed.
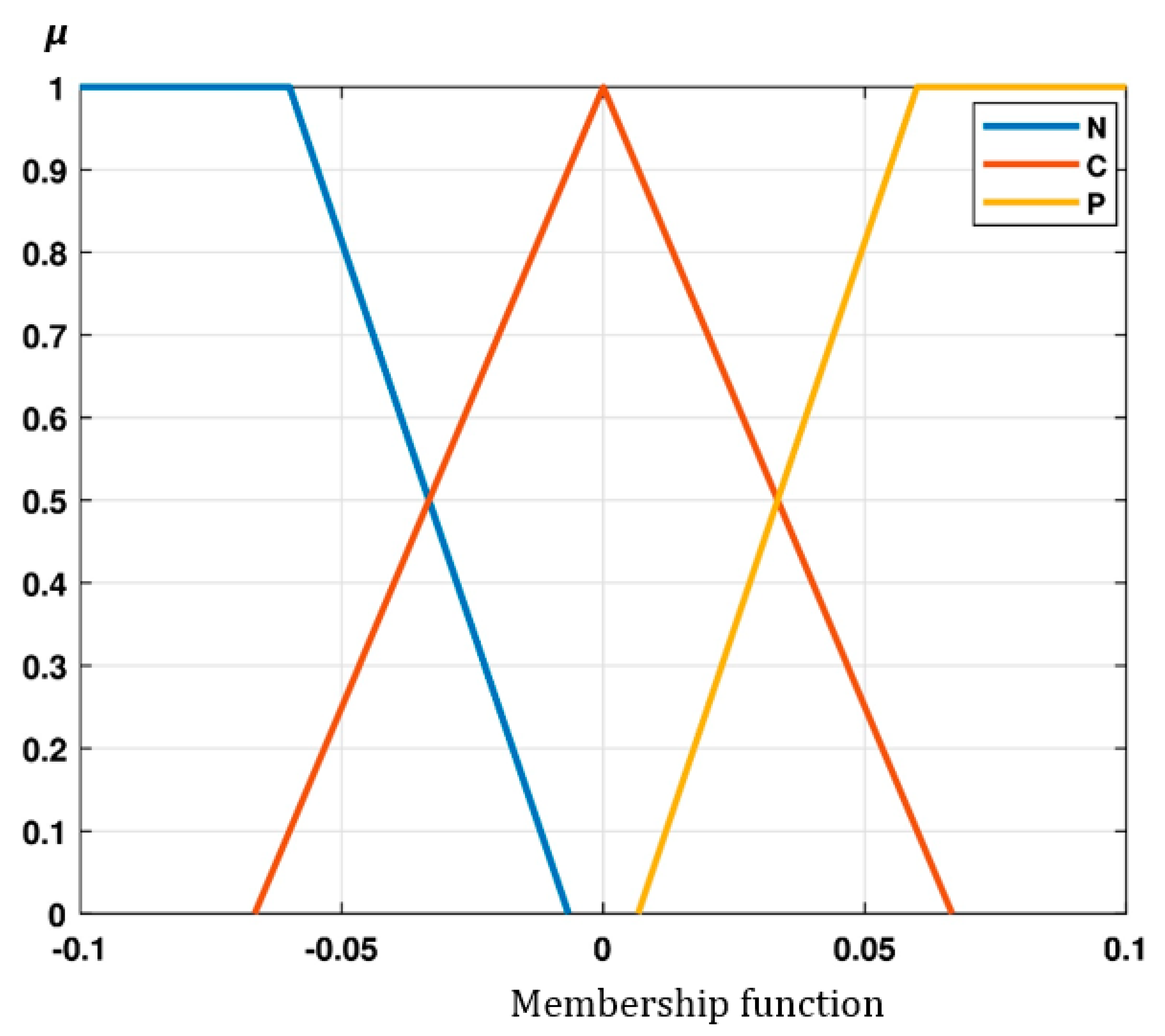
3.3. Control Design for Quadcopter System Stabilization using Fuzzy PID
3.4. Quadcopter Path Planning Assistance System
3.5. Characteristics Analyzed for the UAV Response
3.6. Theoretical Analysis of the Proposed Results: Lyapunov Stability Criteria for Agricultural Drones
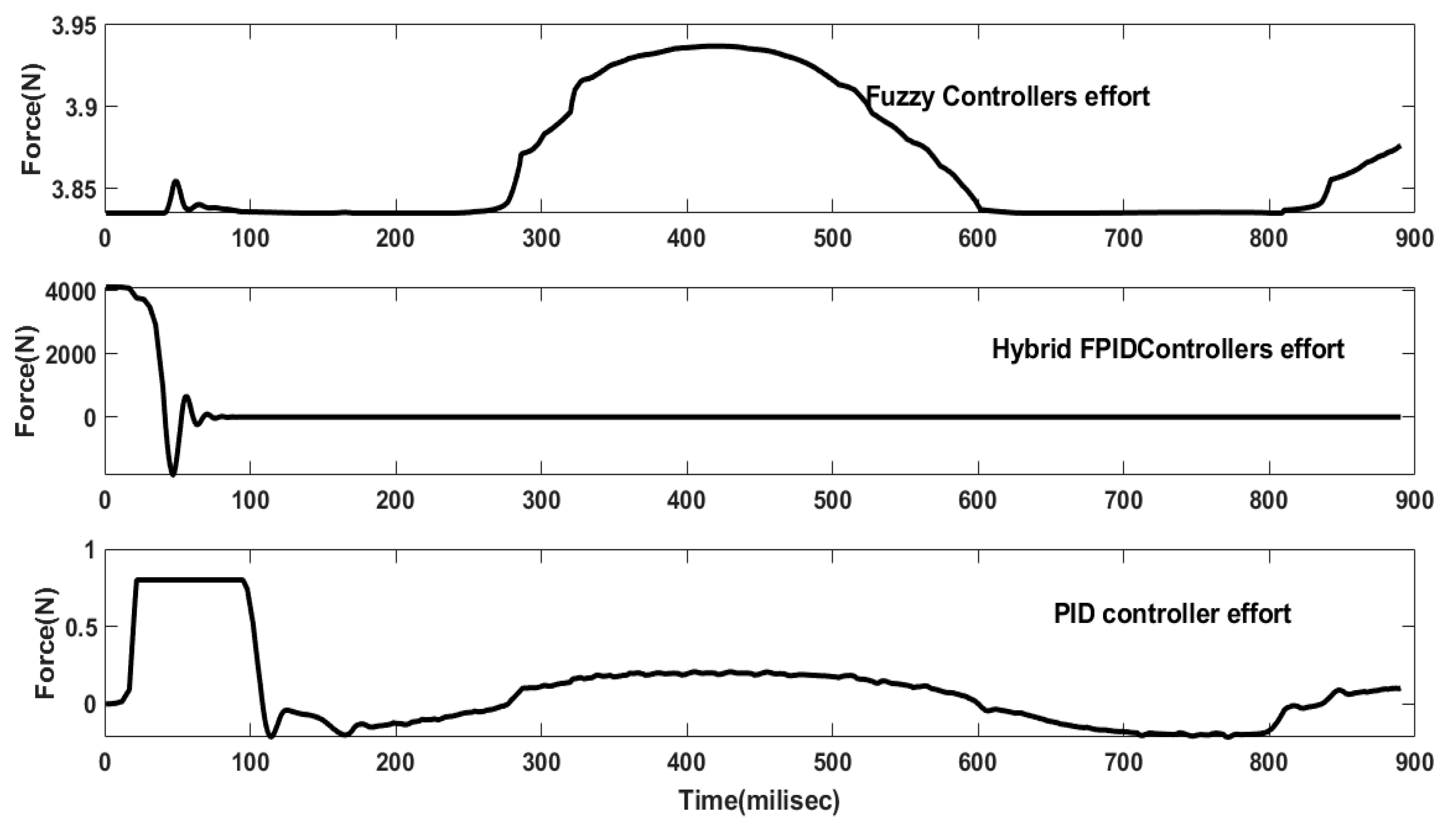
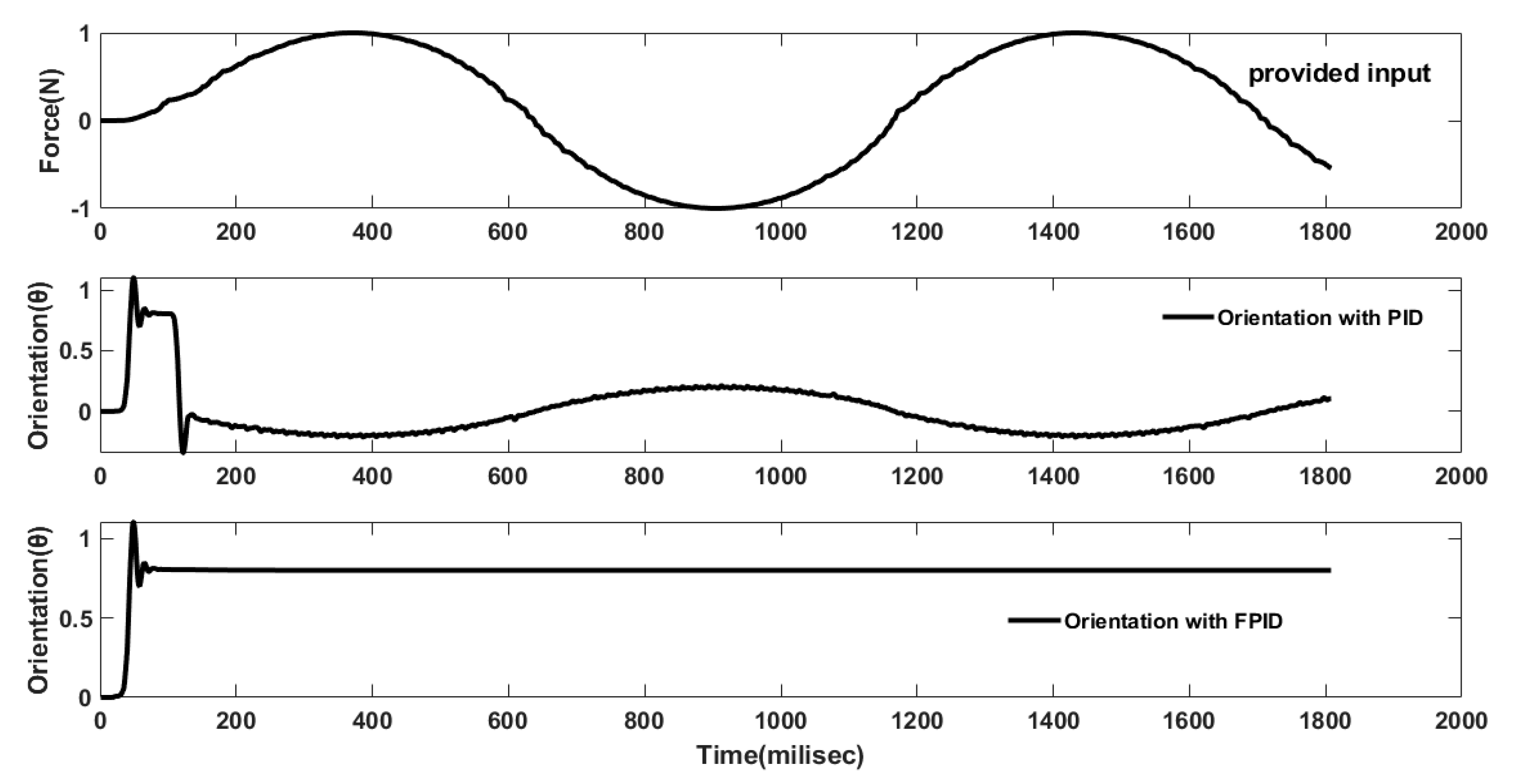
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Idrissi, M.; Salami, M.; Annaz, F. A Review of Quadrotor Unmanned Aerial Vehicles: Applications, Architectural Design and Control Algorithms. J. Intell. Robot. Syst. 2022, 104, 22. [Google Scholar] [CrossRef]
- Amertet, S.; Gebresenbet, G.; Alwan, H.M.; Vladmirovna, K.O. Assessment of Smart Mechatronics Applications in Agriculture: A Review. Appl. Sci. 2023, 13, 7315. [Google Scholar] [CrossRef]
- Telli, K.; Kraa, O.; Himeur, Y.; Ouamane, A.; Boumehraz, M.; Atalla, S.; Mansoor, W. A Comprehensive Review of Recent Research Trends on Unmanned Aerial Vehicles (UAVs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Lee, H.-W.; Lee, C.-S. Research on logistics of intelligent unmanned aerial vehicle integration system. J. Ind. Inf. Integr. 2023, 36, 100534. [Google Scholar] [CrossRef]
- Abbas, N.; Abbas, Z.; Liu, X.; Khan, S.S.; Foster, E.D.; Larkin, S. A Survey: Future Smart Cities Based on Advance Control of Unmanned Aerial Vehicles (UAVs). Appl. Sci. 2023, 13, 9881. [Google Scholar] [CrossRef]
- Si, X.; Xu, G.; Ke, M.; Zhang, H.; Tong, K.; Qi, F. Relative Localization within a Quadcopter Unmanned Aerial Vehicle Swarm Based on Airborne Monocular Vision. Drones 2023, 7, 612. [Google Scholar] [CrossRef]
- Sai, S.; Garg, A.; Jhawar, K.; Chamola, V.; Sikdar, B. A Comprehensive Survey on Artificial Intelligence for Unmanned Aerial Vehicles. IEEE Open J. Veh. Technol. 2023, 4, 713–738. [Google Scholar] [CrossRef]
- Cardenas, J.A.; Carrero, U.E.; Camacho, E.C.; Calderon, J.M. Intelligent Position Controller for Unmanned Aerial Vehicles (UAV) Based on Supervised Deep Learning. Machines 2023, 11, 606. [Google Scholar] [CrossRef]
- Ganesan, T.; Jayarajan, N.; Shri Varun, B.G. Dynamic Control, Architecture, and Communication Protocol for Swarm Unmanned Aerial Vehicles. In Computing in Intelligent Transportation Systems; Naganathan, A., Jayarajan, N., Bin Ibne Reaz, M., Eds.; Springer International Publishing: Cham, Switzerland, 2023; pp. 31–49. [Google Scholar] [CrossRef]
- Din, A.F.U.; Mir, I.; Gul, F.; Al Nasar, M.R.; Abualigah, L. Reinforced Learning-Based Robust Control Design for Unmanned Aerial Vehicle. Arab. J. Sci. Eng. 2023, 48, 1221–1236. [Google Scholar] [CrossRef]
- Amin, R.; Aijun, L.; Shamshirband, S. A review of quadrotor UAV: Control methodologies and performance evaluation. Int. J. Autom. Control. 2016, 10, 87. [Google Scholar] [CrossRef]
- Li, Y.; Chen, C.; Chen, W. Research on Longitudinal Control Algorithm for Flying Wing UAV Based on LQR Technology. Int. J. Smart Sens. Intell. Syst. 2013, 6, 2155–2181. [Google Scholar] [CrossRef]
- Abdelmaksoud, S.I.; Mailah, M.; Abdallah, A.M. Control Strategies and Novel Techniques for Autonomous Rotorcraft Unmanned Aerial Vehicles: A Review. IEEE Access 2020, 8, 195142–195169. [Google Scholar] [CrossRef]
- Hoffmann, G.; Huang, H.; Waslander, S.; Tomlin, C. Quadrotor Helicopter Flight Dynamics and Control: Theory and Experiment. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2007. [Google Scholar]
- Hu, X.; Assaad, R.H. The Use of Unmanned Ground Vehicles and Unmanned Aerial Vehicles in the Civil Infrastructure Sector: Applications, Robotic Platforms, Sensors, and Algorithms. Expert Syst. Appl. 2023, 232, 120897. [Google Scholar] [CrossRef]
- Ibrahim, I.A.; Truby, J.M. FarmTech: Regulating the use of digital technologies in the agricultural sector. Food Energy Secur. 2023, 12, e483. [Google Scholar] [CrossRef]
- James, C.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar]
- Praharaj, M.; Sain, D.; Mohan, B. Development, experimental validation, and comparison of interval type-2 Mamdani fuzzy PID controllers with different footprints of uncertainty. Inf. Sci. 2022, 601, 374–402. [Google Scholar] [CrossRef]
- Anupam, K.; Kumar, V. A novel interval type-2 fractional order fuzzy PID controller: Design, performance evaluation, and its optimal time domain tuning. ISA Trans. 2017, 68, 251–275. [Google Scholar]
- Kumar, A.; Kumar, V. Hybridized ABC-GA optimized fractional order fuzzy pre-compensated FOPID control design for 2-DOF robot manipulator. AEU-Int. J. Electron. Commun. 2017, 79, 219–233. [Google Scholar] [CrossRef]
- El-Nagar, A.M.; El-Bardini, M. Hardware-in-the-loop simulation of interval type-2 fuzzy PD controller for uncertain nonlinear system using low cost microcontroller. Appl. Math. Model. 2016, 40, 2346–2355. [Google Scholar] [CrossRef]
- Jesus, I.S.; Barbosa, R.S. Genetic optimization of fuzzy fractional PD+I controllers. ISA Trans. 2015, 57, 220–230. [Google Scholar] [CrossRef] [PubMed]
- Amertet Finecomess, S.; Gebresenbet, G.; Alwan, H.M. Utilizing an Internet of Things (IoT) Device, Intelligent Control Design, and Simulation for an Agricultural System. IoT 2024, 5, 58–78. [Google Scholar] [CrossRef]
- Xiong, J.-J.; Zheng, E.-H. Position and attitude tracking control for a quadrotor UAV. ISA Trans. 2014, 53, 725–731. [Google Scholar] [CrossRef] [PubMed]
- Amertet, S.; Gebresenbet, G.; Alwan, H.M. Optimizing the performance of a wheeled mobile robots for use in agriculture using a linear-quadratic regulator. Robot. Auton. Syst. 2024, 174, 104642. [Google Scholar]
- Zhang, M.; Wang, C.; Sun, Y.; Li, T. Memristive PAD three-dimensional emotion generation system based on D–S evidence theory. Nonlinear Dyn. 2024, 112, 4841–4861. [Google Scholar] [CrossRef]
- Hasan, A.F.; Al-Shamaa, N.; Husain, S.S.; Humaidi, A.J.; Al-Dujaili, A. Spotted Hyena Optimizer enhances the performance of Fractional-Order PD controller for Tri-copter drone. Int. Rev. Appl. Sci. Eng. 2024, 15, 82–94. [Google Scholar] [CrossRef]
- Abdullah, A.; Alagöz, B.B.; Yeroğlu, C.; Alisoy, H. Sigmoid based PID con-troller implementation for rotor control. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 458–463. [Google Scholar]
- Okasha, M.; Kralev, J.; Islam, M. Design and Experimental Comparison of PID, LQR and MPC Stabilizing Controllers for Parrot Mambo Mini-Drone. Aerospace 2022, 9, 298. [Google Scholar] [CrossRef]
- Wang, L.; Freeman, C.; Rogers, E. Experimental Evaluation of Automatic Tuning of PID Controllers for an Electro-Mechanical System. IFAC-PapersOnLine 2017, 50, 3063–3068. [Google Scholar] [CrossRef]
- Božek, P.; Nikitin, Y. The Development of an Optimally-Tuned PID Control for the Actuator of a Transport Robot. Actuators 2021, 10, 195. [Google Scholar] [CrossRef]
- Sun, Z.; Sanada, K.; Gao, B.; Jin, J.; Fu, J.; Huang, L.; Wu, X. Improved Decoupling Control for a Powershift Automatic Mechanical Transmission Employing a Model-Based PID Parameter Autotuning Method. Actuators 2020, 9, 54. [Google Scholar] [CrossRef]
- Kishore, S.; Laxmi, V. Modeling, analysis and experimental evaluation of boundary threshold limits for Maglev system. Int. J. Dyn. Control. 2020, 8, 707–716. [Google Scholar] [CrossRef]
- Maheedhar, M.; Deepa, T. A Behavioral Study of Different Controllers and Algorithms in Real-Time Applications. IETE J. Res. 2022, 1–25. [Google Scholar] [CrossRef]
- Shamseldin, M.A. Design of Auto-Tuning Nonlinear PID Tracking Speed Control for Electric Vehicle with Uncertainty Consideration. World Electr. Veh. J. 2023, 14, 78. [Google Scholar] [CrossRef]
- Ambroziak, A.; Chojecki, A. The PID controller optimisation module using Fuzzy Self-Tuning PSO for Air Handling Unit in continuous operation. Eng. Appl. Artif. Intell. 2023, 117, 105485. [Google Scholar] [CrossRef]
- Baharuddin, A.; Basri, M.A.M. Self-Tuning PID Controller for Quadcopter using Fuzzy Logic. Int. J. Robot. Control. Syst. 2023, 3, 728–748. [Google Scholar] [CrossRef]
- Patil, S.R.; Agashe, S.D. Auto tuned PID and neural network predictive controller for a flow loop pilot plant. Mater. Today Proc. 2023, 72, 754–760. [Google Scholar] [CrossRef]
- Visioli, A.; Sánchez-Moreno, J. A relay-feedback automatic tuning methodology of PIDA controllers for high-order processes. Int. J. Control. 2022, 97, 51–58. [Google Scholar] [CrossRef]
- Coutinho, J.P.; Santos, L.O.; Reis, M.S. Bayesian Optimization for automatic tuning of digital multi-loop PID controllers. Comput. Chem. Eng. 2023, 173, 108211. [Google Scholar] [CrossRef]
- Nath, U.M.; Dey, C.; Mudi, R.K. Review on IMC-based PID Controller Design Approach with Experimental Validations. IETE J. Res. 2023, 69, 1640–1660. [Google Scholar] [CrossRef]
- Saini, S.; Hernandez, J.; Nayak, S. Auto-Tuning PID Controller on Electromechanical Actuators Using Machine Learning; No. 2023-01-0435; SAE International: Warrendale, PA, USA, 2023; SAE Technical Paper. [Google Scholar] [CrossRef]
- Sufendi; Trilaksono, B.R.; Nasution, S.H.; Purwanto, E.B. Design and implementation of hardware-in-the-loop-simulation for uav using pid control method. In Proceedings of the 2013 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering (ICICI-BME), Bandung, Indonesia, 7–8 November 2013; pp. 124–130. [Google Scholar]
- Mishra, A.K.; Nanda, P.K.; Ray, P.K.; Das, S.R.; Patra, A.K. IFGO Optimized Self-adaptive Fuzzy-PID Controlled HSAPF for PQ Enhancement. Int. J. Fuzzy Syst. 2023, 25, 468–484. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy logic. In Granular, Fuzzy, and Soft Computing; Springer: New York, NY, USA, 2023; pp. 19–49. [Google Scholar]
- Rodríguez-Abreo, O.; Rodríguez-Reséndiz, J.; García-Cerezo, A.; García-Martínez, J.R. Fuzzy logic controller for UAV with gains optimized via genetic algorithm. Heliyon 2024, 10, e26363. [Google Scholar] [CrossRef] [PubMed]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| negative input (N) | negative input (N) | most negative (NNNN) |
| negative input (N) | close to zero (C) | more negative (NNN) |
| negative input (N) | positive input (P) | more negative (NN) |
| close to zero (C) | negative input (N) | negative input (N) |
| close to zero (C) | close to zero (C) | close to zero (C) |
| close to zero (C) | positive input (P) | more positive (PP) |
| positive input (P) | negative input (N) | more positive (PPP) |
| positive input (P) | close to zero (C) | most positive (PPPP) |
| positive input (P) | positive input (P) | most positive (PPPP) |
| Cartesian Scheme | Quadcopter System Scheme |
|---|---|
| Specification | Automatic Tuned Controller Response (Fuzzy PID) | Classic Controller Response (PID) | Automatic Tuned Controller over Compensator (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Low Fidelity | Medium Fidelity | High Fidelity | Low Fidelity | Medium Fidelity | High Fidelity | Low Fidelity | Medium Fidelity | High Fidelity | |
| Roll | 1.55 s | 1.55 s | 1.55 s | 2.65 s | 2.65 s | 2.65 s | 41.5% | 41.5% | 41.5% |
| Height | 3.55 s | 3.55 s | 2.8 s | 4.0 s | 5.0 s | 4.6 s | 11 | 11 | 17.4 |
| Airspeed | 0.55 s | 0.55 s | 0.55 s | 0.68 s | 0.98 s | 0.98 s | 44 | 44 | 44 |
| Specification | Current Work: Automatic Tuned Controller Response (Fuzzy PID) | Previous Works [24,25] | Current Work over Previous Work (%) (Fuzzy PID) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Low Fidelity | Medium Fidelity | High Fidelity | Low Fidelity | Medium Fidelity | High Fidelity | Low Fidelity | Medium Fidelity | High Fidelity | |
| Roll | 1.55 s | 1.55 s | 1.55 s | 2.86 | 2.56 | 3.34 | 35.31% | 39.45% | 53.6% |
| Height | 4.55 s | 4.55 s | 3.8 s | 4.89 | 4.86 | 4.94 | 7% | 7% | 8% |
| Airspeed | 0.55 s | 0.55 s | 0.55 s | 1.97 | 0.92 | 0.98 | 72.08% | 41.22% | 43.88% |
| Specifications | % (Fuzzy PID over PID) | % (Fuzzy PID over fuzzy) | |||
|---|---|---|---|---|---|
| Overshoot (%) | 0.5 | 0.25 | 0.05 | 90 | 80 |
| Settling time (s) | 1.2 | 0.85 | 0.78 | 35 | 8.23 |
| Rise time (s) | 1.5 | 0.98 | 0.65 | 56.67 | 33.67 |
| Steady state error (%) | 0.09 | 0.05 | 0.025 | 72.22 | 50 |
| Parameters Specification | Rise Time (s) | Settling Time (s) | Steady State Error | Overshoot | Stability |
|---|---|---|---|---|---|
| [20 30 80 120] | [1.8 1.6 0.9 0.5] | Small change | decreases ( | [0.01 0.1 0.4 0.6] | decreases ( |
| [20 30 80 120] | [1.4 1.1 0.8 0.45] | increases | 0 | [0.1 0.3 0.5 0.7] | decreases ( |
| [20 30 80 120] | Small change | decreases ( | No effect in theory | improvement if is small |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amertet, S.; Gebresenbet, G.; Alwan, H.M. Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers. Appl. Sci. 2024, 14, 3458. https://doi.org/10.3390/app14083458
Amertet S, Gebresenbet G, Alwan HM. Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers. Applied Sciences. 2024; 14(8):3458. https://doi.org/10.3390/app14083458
Chicago/Turabian StyleAmertet, Sairoel, Girma Gebresenbet, and Hassan Mohammed Alwan. 2024. "Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers" Applied Sciences 14, no. 8: 3458. https://doi.org/10.3390/app14083458
APA StyleAmertet, S., Gebresenbet, G., & Alwan, H. M. (2024). Modeling of Unmanned Aerial Vehicles for Smart Agriculture Systems Using Hybrid Fuzzy PID Controllers. Applied Sciences, 14(8), 3458. https://doi.org/10.3390/app14083458