

Sensory Factors Influence Dynamic and Static Bi-Manual Finger Grip Strength in a Real-World Task Context




Abstract
:1. Introduction
2. Materials and Methods
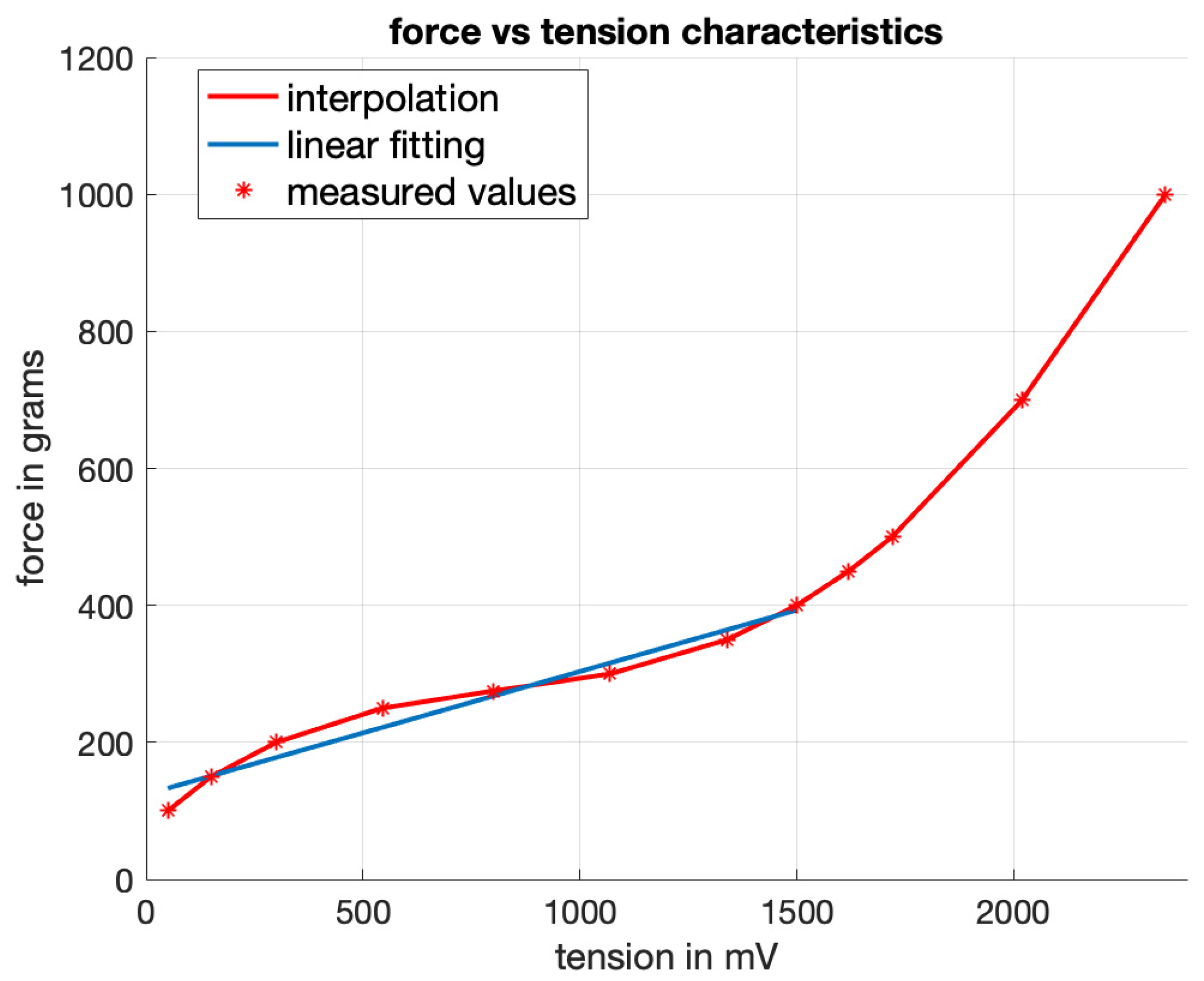
2.1. Sensor Glove System
2.2. Software for Data Collection
2.3. Participants
2.4. Experimental Design
3. Results
3.1. Descriptive Analysis
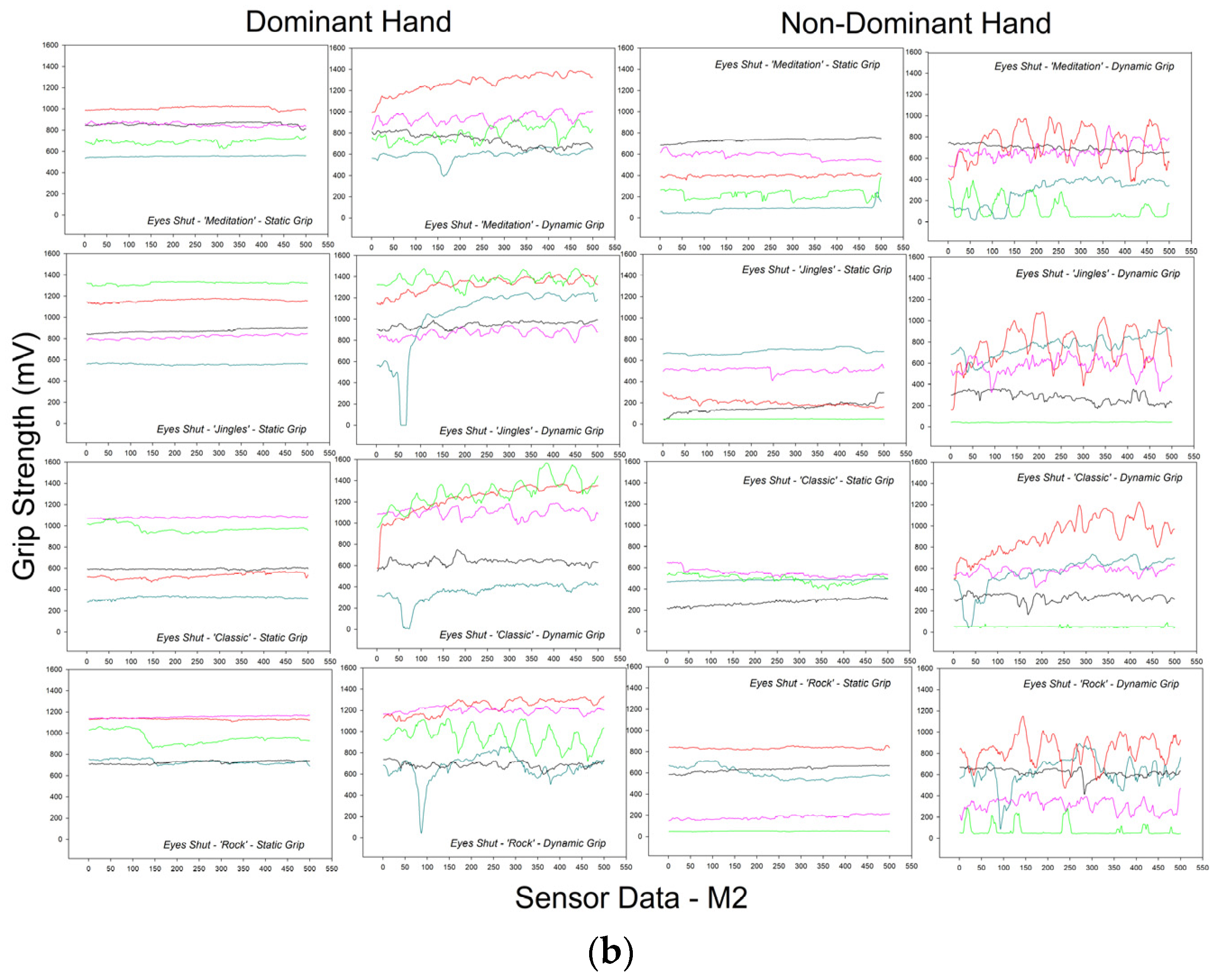
3.1.1. Static Grip
3.1.2. Dynamic Grip
3.2. Statistical Analysis
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dresp-Langley, B. Grip force as a functional window to somatosensory cognition. Front. Psychol. 2022, 13, 1026439. [Google Scholar] [CrossRef] [PubMed]
- De Mathelin, M.; Nageotte, F.; Zanne, P.; Dresp-Langley, B. Sensors for expert grip force profiling: Towards benchmarking manual control of a robotic device for surgical tool movements. Sensors 2019, 19, 4575. [Google Scholar] [CrossRef] [PubMed]
- Dresp-Langley, B.; Nageotte, F.; Zanne, P.; de Mathelin, M. Correlating grip force signals from multiple sensors highlights prehensile control strategies in a complex task-user system. Bioengineering 2020, 7, 143. [Google Scholar] [CrossRef] [PubMed]
- Dresp-Langley, B. Wearable Sensors for Individual Grip Force Profiling. In Advances in Biosensors Reviews Volume 3; IFSA Publishing: Barcelona, Spain, 2020; pp. 107–122. [Google Scholar]
- Liu, R.; Dresp-Langley, B. Making Sense of Complex Sensor Data Streams. Electronics 2021, 10, 1391. [Google Scholar] [CrossRef]
- Liu, R.; Wandeto, J.; Nageotte, F.; Zanne, P.; de Mathelin, M.; Dresp-Langley, B. Spatiotemporal Modeling of Grip Forces Captures Proficiency in Manual Robot Control. Bioengineering 2023, 10, 59. [Google Scholar] [CrossRef] [PubMed]
- Johansson, R.S.; Cole, K.J. Sensory-motor coordination during grasping and manipulative actions. Curr. Opin. Neurobiol. 1992, 2, 815–823. [Google Scholar] [CrossRef] [PubMed]
- Jenmalm, P.; Johansson, R.S. Visual and somatosensory information about object shape control manipulative fingertip forces. J. Neurosci. 1997, 17, 4486–4499. [Google Scholar] [CrossRef]
- Borra, E.; Luppino, G. Large-scale temporo-parieto-frontal networks for motor and cognitive motor functions in the primate brain. Cortex 2019, 118, 19–37. [Google Scholar] [CrossRef]
- Buckingham, G.; Cant, J.S.; Goodale, M.A. Living in a material world: How visual cues to material properties affect the way that we lift objects and perceive their weight. J. Neurophysiol. 2009, 102, 3111–3118. [Google Scholar] [CrossRef]
- Flanagan, J.R.; Bowman, M.C.; Johansson, R.S. Control strategies in object manipulation tasks. Curr. Opin. Neurobiol. 2006, 16, 650–659. [Google Scholar] [CrossRef]
- Fu, Q.; Santello, M. Coordination between digit forces and positions: Interactions between anticipatory and feedback control. J. Neurophysiol. 2014, 111, 1519–1528. [Google Scholar] [CrossRef] [PubMed]
- Cole, K.J.; Potash, M.; Peterson, C. Failure to disrupt the ‘sensorimotor’ memory for lifting objects with a precision grip. Exp. Brain Res. 2008, 184, 157–163. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, D.A.; Dubrowski, A.; Carnahan, H. The use of auditory cues in anticipatory control of grasping forces. Mot. Control 2010, 14, 255–264. [Google Scholar] [CrossRef] [PubMed]
- Cai, A.; Pingel, I.; Lorz, D.; Beier, J.P.; Horch, R.E.; Arkudas, A. Force distribution of a cylindrical grip differs between dominant and nondominant hand in healthy subjects. Arch. Orthop. Trauma Surg. 2018, 138, 1323–1331. [Google Scholar] [CrossRef] [PubMed]
- Bohannon, R.W. Grip strength: A summary of studies comparing dominant and non-dominant limb measurements. Percept. Mot. Skills 2003, 96, 728–730. [Google Scholar] [CrossRef] [PubMed]
- Cha, S.M.; Shin, H.D.; Kim, K.C.; Park, J.W. Comparison of grip strength among six grip methods. J. Hand Surg. Am. 2014, 39, 2277–2284. [Google Scholar] [CrossRef] [PubMed]
- Fallahi, A.A.; Jadidian, A.A. The effect of hand dimensions, hand shape and some anthropometric characteristics on handgrip strength in male grip athletes and non-athletes. J. Hum. Kinet. 2011, 29, 151–159. [Google Scholar] [CrossRef]
- Li, K.W.; Yu, R. Assessment of grip force and subjective hand force exertion under handedness and postural conditions. Appl. Ergon. 2011, 42, 929–933. [Google Scholar] [CrossRef] [PubMed]
- Carson, R.G.; Holton, E. Deficits in rate of force production during multifinger tasks are associated with cognitive status. Int. J. Geriatr. Psychiatry 2022, 37. [Google Scholar] [CrossRef]
- Firth, J.A.; Smith, L.; Sarris, J.; Vancampfort, D.; Schuch, F.; Carvalho, A.F.; Solmi, M.; Yung, A.R.; Stubbs, B.; Firth, J. Handgrip strength is associated with hippocampal volume and white matter hyperintensities in major depression and healthy controls: A UK Biobank study. Psychosom. Med. 2020, 82, 3946. [Google Scholar] [CrossRef]
- Cui, M.; Zhang, S.; Liu, Y.; Gang, X.; Wang, G. Grip strength and the risk of cognitive decline and dementia: A systematic review and meta-analysis of longitudinal cohort studies. Front. Aging Neurosci. 2021, 13, 1. [Google Scholar] [CrossRef] [PubMed]
- Bohannon, R.W. Grip Strength: An Indispensable Biomarker for Older Adults. Clin. Interv. Aging 2019, 14, 1681–1691. [Google Scholar] [CrossRef] [PubMed]
- Aravena, P.; Delevoye-Turrell, Y.; Deprez, V.; Cheylus, A.; Paulignan, Y.; Frak, V.; Nazir, T. Grip force reveals the context sensitivity of language-induced motor activity during «action words» processing: Evidence from sentential negation. PLoS ONE 2012, 7, e50287. [Google Scholar] [CrossRef]
- Bakermans-Kranenburg, M.J.; van Ijzendoorn, M.H.; Riem, M.M.E.; Tops, M.; Alink, L.R.A. Oxytocin decreases handgrip force in reaction to infant crying in females without harsh parenting experiences. SCAN 2012, 7, 951–957. [Google Scholar] [CrossRef] [PubMed]
- Oldfield, R.C. The assessment and analysis of handedness: The Edinburgh inventory. Neuropsychologia 1971, 377, 97–113. [Google Scholar] [CrossRef] [PubMed]
- Young, R.W. Evolution of the human hand: The role of throwing and clubbing. J. Anat. 2003, 202, 165–174. [Google Scholar] [CrossRef] [PubMed]
- Teichert, M.; Bolz, J. How senses work together: Cross-modal interactions between primary sensory cortices. Neural Plast. 2018, 2018, 5380921. [Google Scholar] [CrossRef] [PubMed]
- Parry, R.; Sarlegna, F.R.; Jarrassé, N.; and Roby-Brami, A. Anticipation and compensation for somatosensory deficits in object handling: Evidence from a patient with large fiber sensory neuropathy. J. Neurophysiol. 2021, 126, 575–590. [Google Scholar] [CrossRef]
- Maiello, G.; Schepko, M.; Klein, L.K.; Paulun, V.C.; Fleming, R.W. Humans can visually judge grasp quality and refine their judgments through visual and haptic feedback. Front. Neurosci. 2021, 14, 591898. [Google Scholar] [CrossRef]
- Naceri, A.; Moscatelli, A.; Haschke, R.; Ritter, H.; Santello, M.; Ernst, M.O. Multidigit force control during unconstrained grasping in response to object perturbations. J. Neurophysiol. 2017, 117, 2025–2036. [Google Scholar] [CrossRef]
- Zatsiorsky, V.M.; Latash, M.L. Multifinger prehension: An overview. J. Mot. Behav. 2008, 40, 446–476. [Google Scholar] [CrossRef] [PubMed]
- Kinoshita, H.; Kawai, S.; Ikuta, K. Contributions and co-ordination of individual fingers in multiple finger prehension. Ergonomics 1995, 38, 1212–1230. [Google Scholar] [CrossRef] [PubMed]
- Latash, M.L.; Zatsiorsky, V.M. Multi-finger prehension: Control of a redundant mechanical system. Adv. Exp. Med. Biol. 2009, 629, 597–618. [Google Scholar] [CrossRef] [PubMed]
- Adhikari, B.; Majumdar, S. Polymers in sensor applications. Prog. Polym. Sci. 2004, 29, 699–766. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, G.; Xue, Y.; Duan, Q.; Liang, X.; Lin, T.; Wu, Z.; Tan, Y.; Zhao, Q.; Zheng, W.; et al. Fatigue-Resistant Conducting Polymer Hydrogels as Strain Sensor for Underwater Robotics. Adv. Funct. Mater. 2023, 33, 2305705. [Google Scholar] [CrossRef]
- Kim, J.; Campbell, A.S.; de Ávila, B.E.; Wang, J. Wearable biosensors for healthcare monitoring. Nat. Biotechnol. 2019, 37, 389–406. [Google Scholar] [CrossRef] [PubMed]
- Jiang, R.; Westwater, M.L.; Noble, S.; Rosenblatt, M.; Dai, W.; Qi, S.; Sui, J.; Calhoun, V.D.; Scheinost, D. Associations between grip strength, brain structure, and mental health in >40,000 participants from the UK Biobank. BMC Med. 2022, 20, 286. [Google Scholar] [CrossRef] [PubMed]
- Dercon, Q.; Nicholas, J.M.; James, S.N.; Schott, J.M.; Richards, M. Grip strength from midlife as an indicator of later-life brain health and cognition: Evidence from a British birth cohort. BMC Geriatr. 2021, 21, 475. [Google Scholar]
- Duchowny, K.A.; Ackley, S.F.; Brenowitz, W.D.; Wang, J.; Zimmerman, S.C.; Caunca, M.R.; Glymour, M.M. Associations Between Handgrip Strength and Dementia Risk, Cognition, and Neuroimaging Outcomes in the UK Biobank Cohort Study. JAMA Netw. Open 2022, 5, e2218314. [Google Scholar] [CrossRef]
- Wang, Y.; Bohannon, R.W.; Li, X.; Sindhu, B.; Kapellusch, J. Hand-Grip Strength: Normative Reference Values and Equations for Individuals 18 to 85 Years of Age Residing in the United States. J. Orthop. Sports Phys. Ther. 2018, 48, 685–693. [Google Scholar] [CrossRef]
- Milton, A.J.; Kwok, J.C.F.; McClellan, J.; Randall, S.G.; Lathia, J.D.; Warren, P.M.; Silver, D.J.; Silver, J. Recovery of Forearm and Fine Digit Function After Chronic Spinal Cord Injury by Simultaneous Blockade of Inhibitory Matrix Chondroitin Sulfate Proteoglycan Production and the Receptor PTPσ. J. Neurotrauma 2023, 40, 2500–2521. [Google Scholar] [CrossRef] [PubMed]
- Endo, K.; Kakisaka, K.; Kuroda, H.; Miyasaka, A.; Takikawa, Y.; Matsumoto, T. Annual changes in grip strength and skeletal muscle mass in chronic liver disease: Observational study. Sci. Rep. 2023, 13, 1648. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cartesian Analysis Plan S3 × H2 × E2 × M4 × G2 | |||
|---|---|---|---|
| Factor/Interaction | df | F | p |
| Sensor (S3) | 2/479 | 119.73 | <0.001 |
| Hand (H2) | 1/479 | 41.66 | <0.01 |
| Grip (G2) | 1/479 | 10.34 | <0.01 |
| Music (M4) | 3/479 | 3.71 | <0.05 |
| Sensor × Hand (S3 × H2) | 2/479 | 55.39 | <0.01 |
| Cartesian Analysis Plan S3 × H2 × G2 × M4 × E2 | |||
|---|---|---|---|
| Factor/Interaction | df | F | p |
| Eyes (E2) | 1/479 | 0.39 | <0.54 NS |
| Hand × Eyes (H2 × E2) | 1/479 | 0.02 | <0.89 NS |
| Grip × Eyes (G2 × E2) | 1/479 | 0.13 | <0.72 NS |
| Music × Eyes (M4 × E2) | 3/479 | 0.22 | <0.89 NS |
| Sensor × Eyes (S3 × E2) | 2/479 | 0.27 | <0.77 NS |
| Sensor × Grip (S3 × G2) | 2/479 | 0.99 | <0.38 NS |
| Hand × Grip (H2 × G2) | 1/479 | 0.05 | <0.83 NS |
| Sensor × Music (S3 × M4) | 6/479 | 0.51 | <0.81 NS |
| Grip × Music (G2 × M4) | 3/479 | 0.48 | <0.70 NS |
| Hand × Music (H2 × M4) | 3/479 | 0.59 | <0.62 NS |
| Comparison | d | t | p (Unadj.) | Threshold | Significance |
|---|---|---|---|---|---|
| hand factor in sensor M1 | |||||
| dominant vs. non | 52.73 | 1.36 | <0.18 | 0.050 | no |
| hand factor in sensor M2 | |||||
| dominant vs. non | 476.74 | 12.27 | <0.001 | 0.050 | yes |
| hand factor in sensor M3 | |||||
| dominant vs. non | 10.42 | 0.27 | <0.79 | 0.050 | no |
| Comparison | d | t | p (Unadj.) | Threshold | Significance |
|---|---|---|---|---|---|
| ‘rock’ vs. ‘classic’ | 115.61 | 3.17 | <0.002 | 0.009 | yes |
| ‘jingles’ vs. ‘classic’ | 87.45 | 2.40 | <0.017 | 0.010 | no |
| ‘meditation’ vs. ‘classic’ | 54.65 | 1.50 | <0.135 | 0.017 | no |
| ‘rock’ vs. ‘meditation’ | 60.96 | 1.67 | <0.095 | 0.013 | no |
| ‘jingles’ vs. ‘meditation’ | 32.797 | 0.90 | <0.369 | 0.025 | no |
| ‘rock’ vs. ‘jingles’ | 28.17 | 0.77 | <0.440 | 0.050 | no |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dresp-Langley, B.; Liu, R.; de Mathelin, M. Sensory Factors Influence Dynamic and Static Bi-Manual Finger Grip Strength in a Real-World Task Context. Appl. Sci. 2024, 14, 3548. https://doi.org/10.3390/app14093548
Dresp-Langley B, Liu R, de Mathelin M. Sensory Factors Influence Dynamic and Static Bi-Manual Finger Grip Strength in a Real-World Task Context. Applied Sciences. 2024; 14(9):3548. https://doi.org/10.3390/app14093548
Chicago/Turabian StyleDresp-Langley, Birgitta, Rongrong Liu, and Michel de Mathelin. 2024. "Sensory Factors Influence Dynamic and Static Bi-Manual Finger Grip Strength in a Real-World Task Context" Applied Sciences 14, no. 9: 3548. https://doi.org/10.3390/app14093548
APA StyleDresp-Langley, B., Liu, R., & de Mathelin, M. (2024). Sensory Factors Influence Dynamic and Static Bi-Manual Finger Grip Strength in a Real-World Task Context. Applied Sciences, 14(9), 3548. https://doi.org/10.3390/app14093548