
Multi-View Synthesis of Sparse Projection of Absorption Spectra Based on Joint GRU and U-Net


Abstract
:1. Introduction
2. Mathematical Background
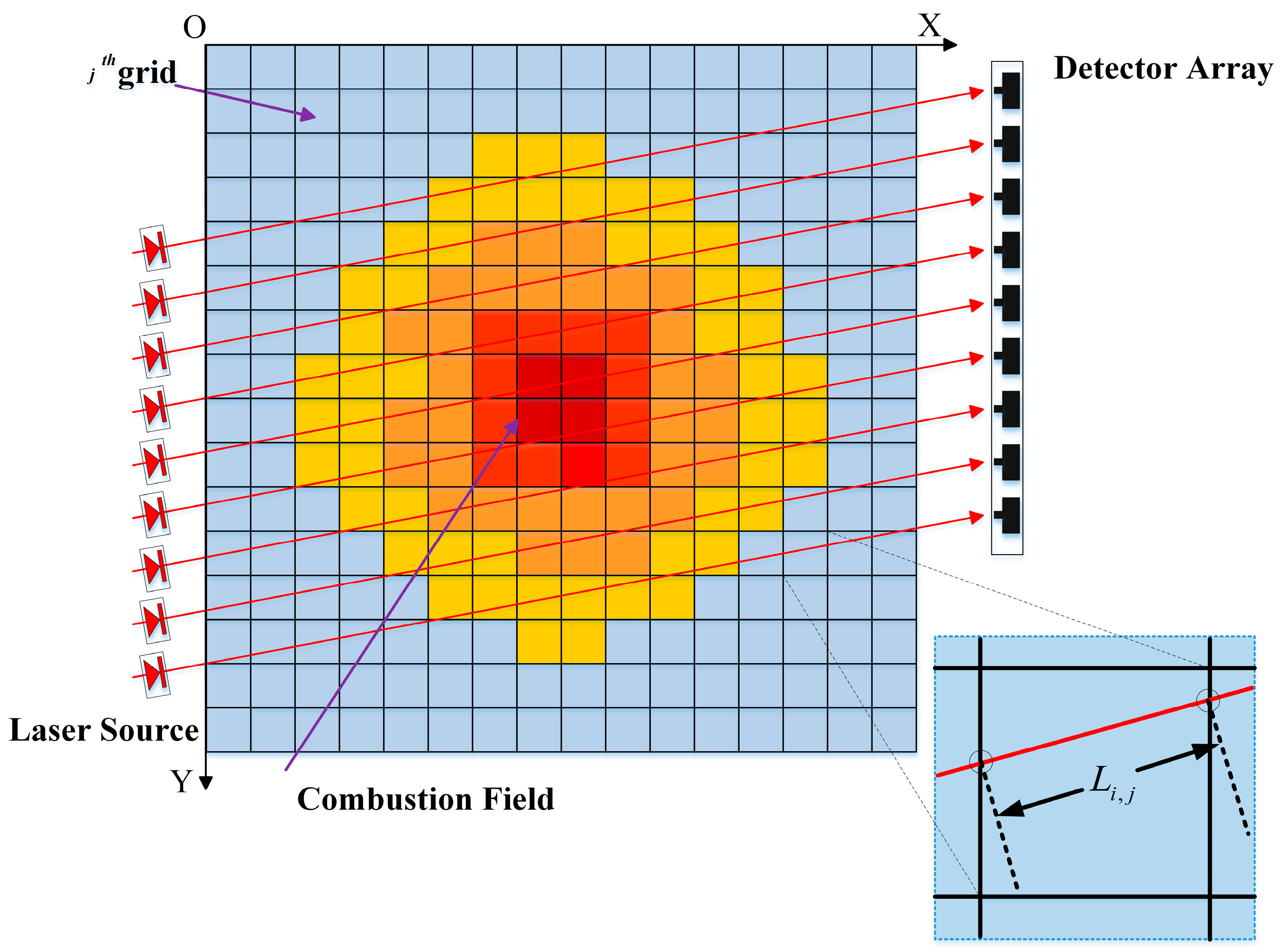
2.1. Tunable Diode Laser Absorption Tomography
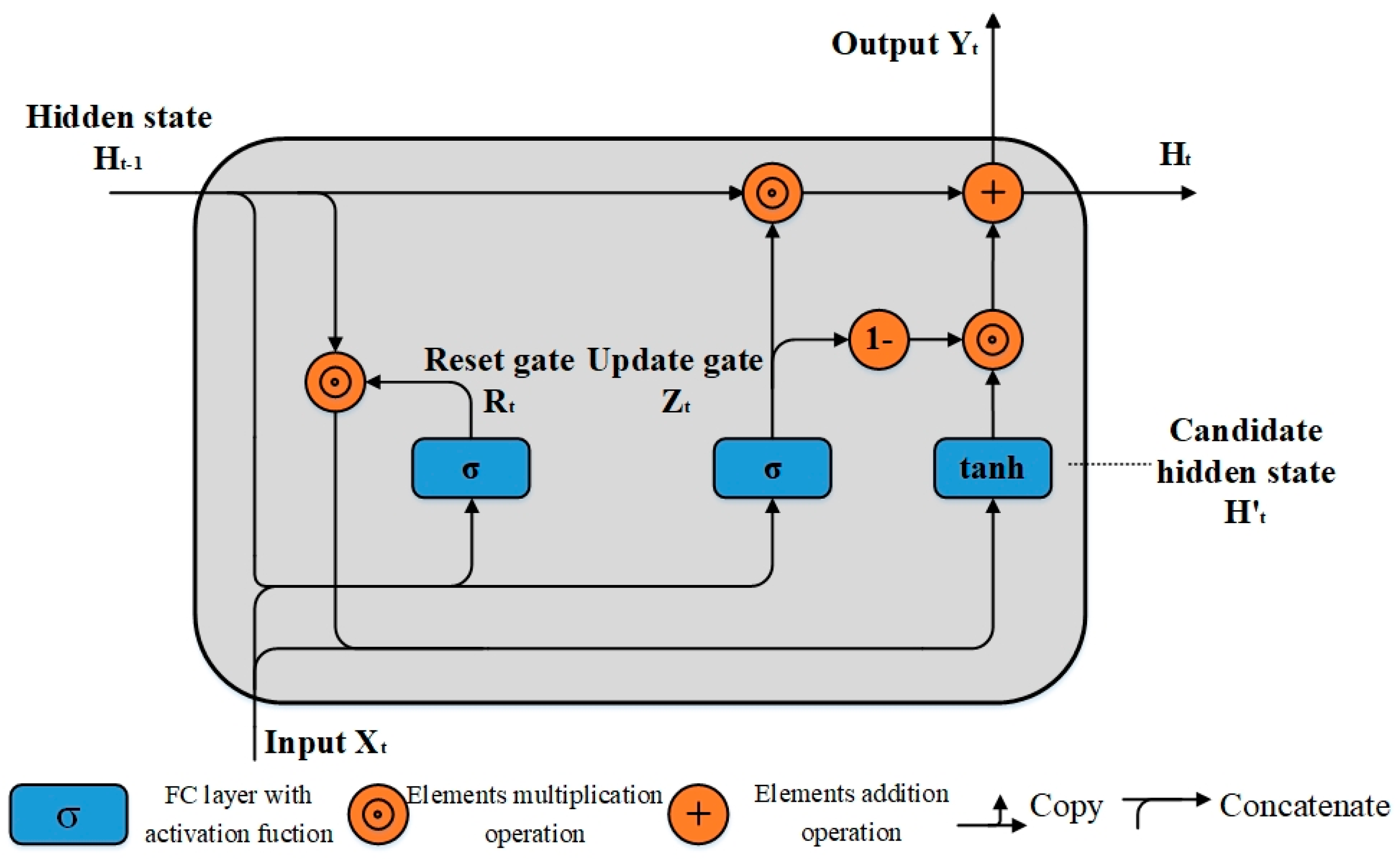
2.2. GRU Module for Absorbance Data
2.3. Residual Networks
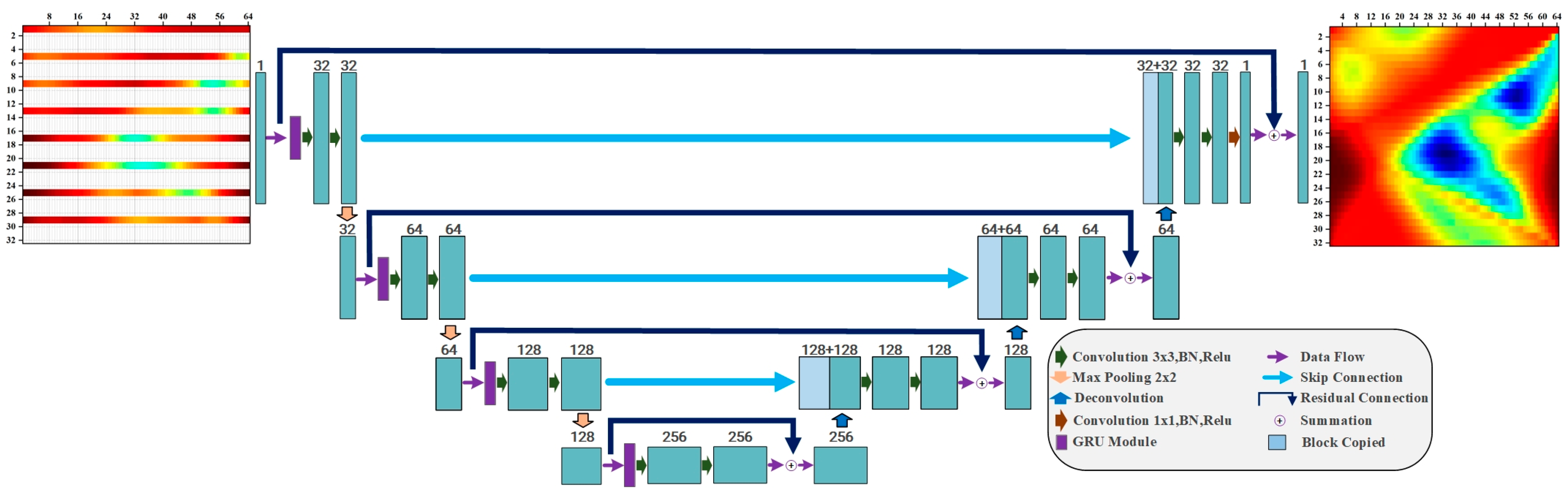
2.4. GMResUnet Structure
3. Settings for Simulative Studies
3.1. Dataset Preparation
3.2. Network Training and Implementation
3.3. Indexes of the Quality Assessment
4. Results and Discussion
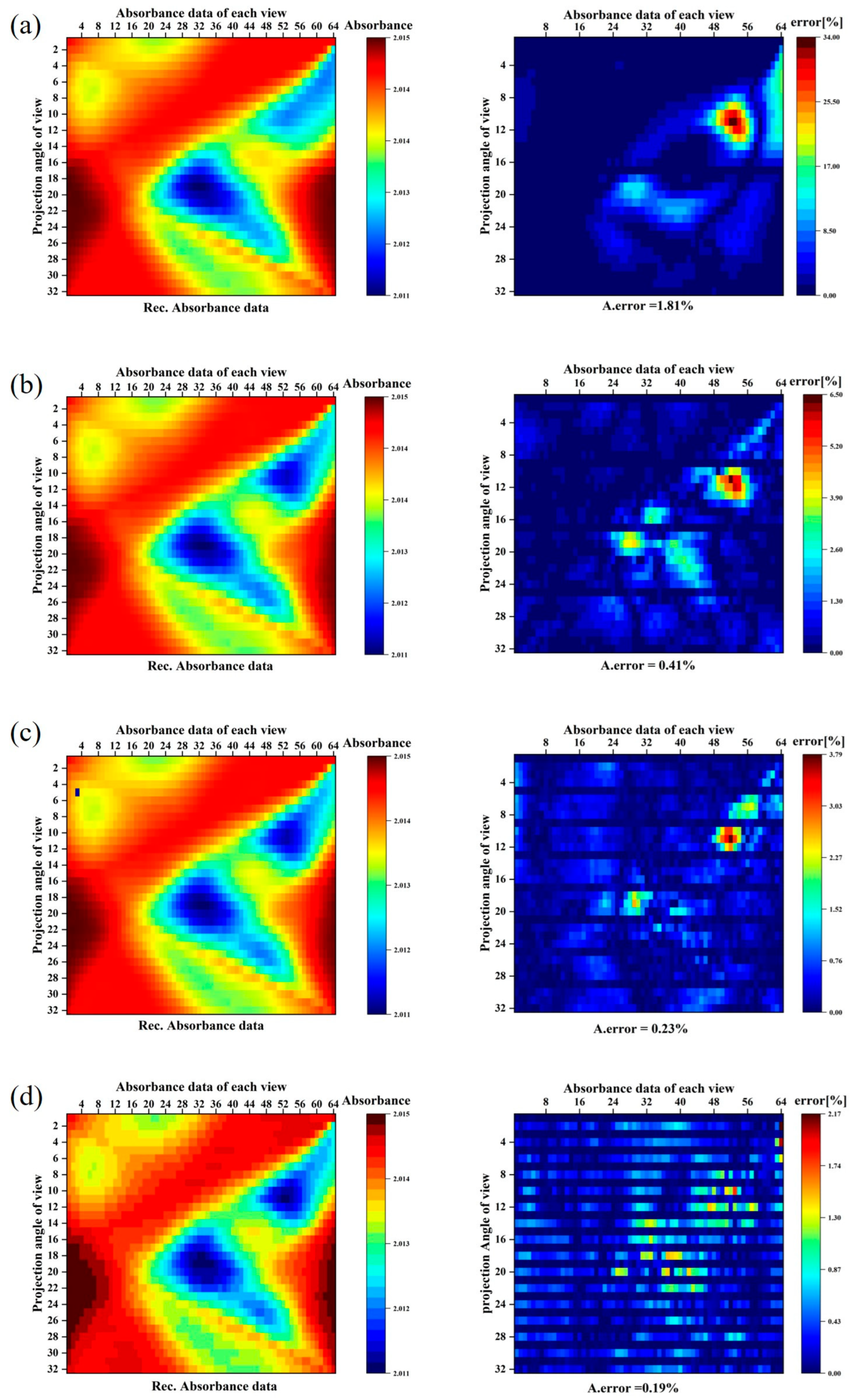
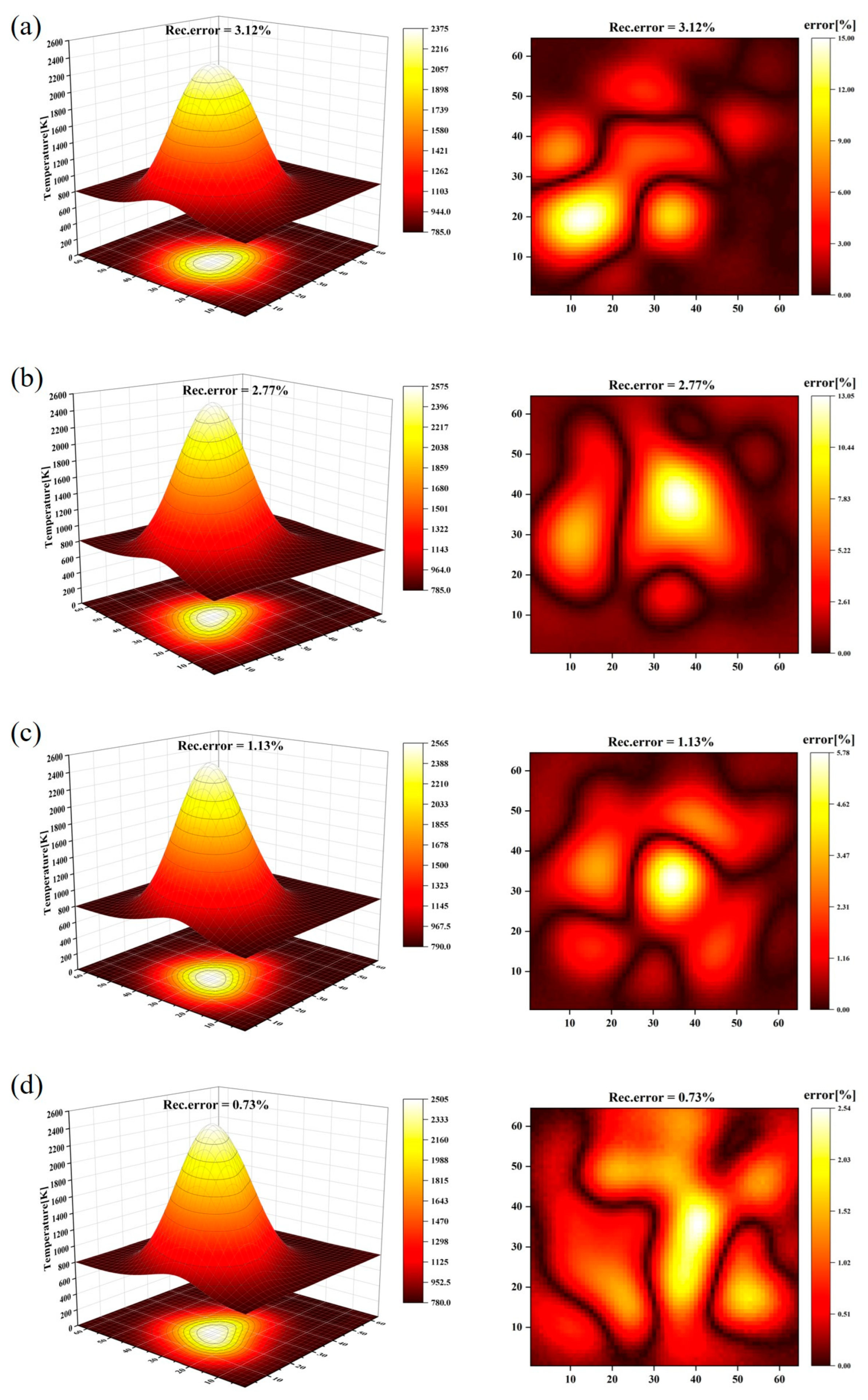
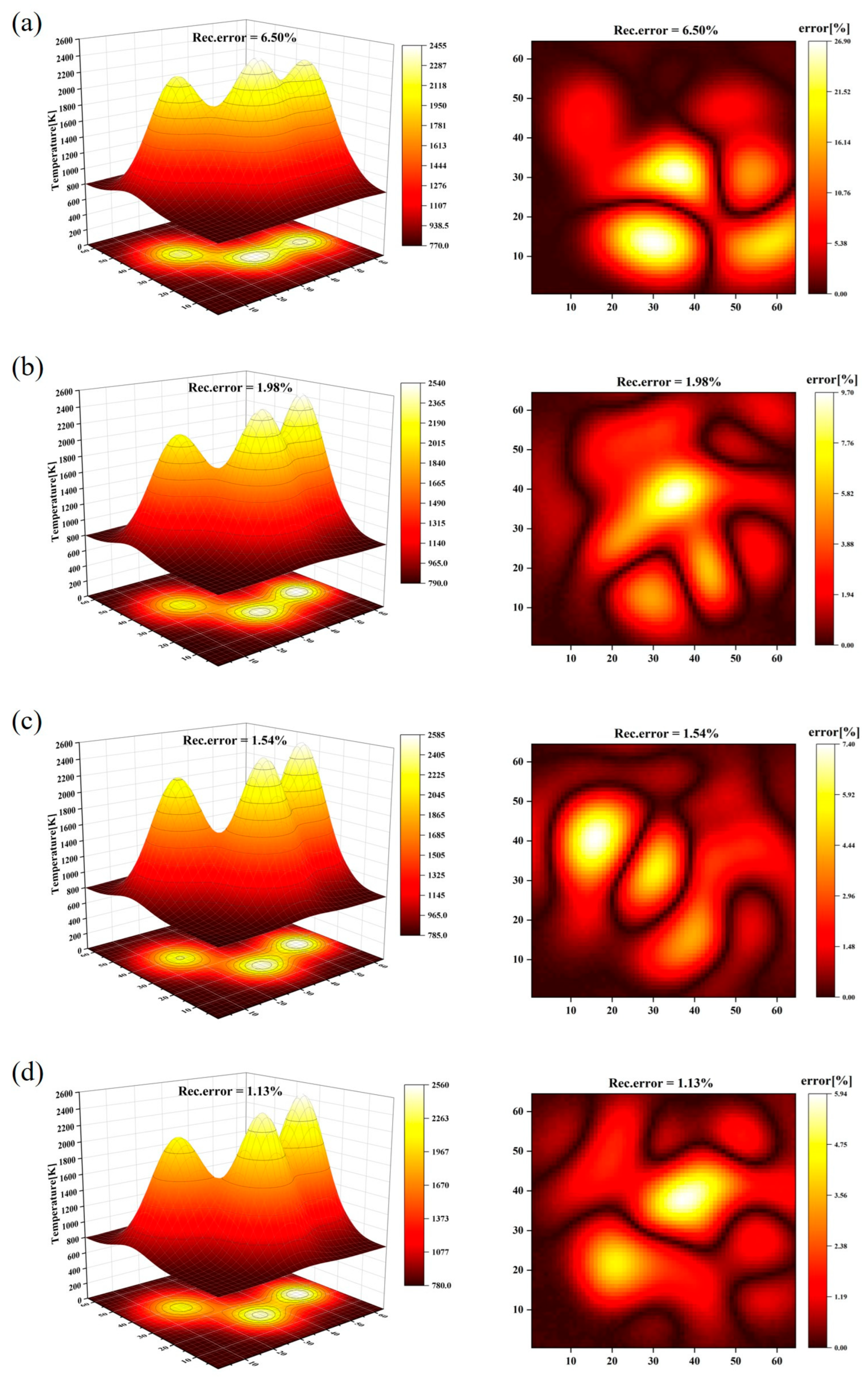
4.1. Image Reconstruction Results
4.2. Evaluation of Indicators
4.3. Noise Resistance Analysis of the Algorithm
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, D.; Kubota, Y.; Izato, Y.; Miyake, A. Temperature variation measurements of an ignited energetic ionic liquid. Sci. Technol. Energ. Mater. 2023, 84, 14–16. [Google Scholar]
- Manjhi, S.K.; Kumar, R. Surface heat flux measurements for short time-period on combustion chamber with different types of coaxial thermocouples. Exp. Heat Transf. 2020, 33, 282–303. [Google Scholar] [CrossRef]
- Stoukatch, S.; Dupont, F.; Laurent, P.; Redouté, J.-M. Package Design Thermal Optimization for Metal-Oxide Gas Sensors by Finite Element Modeling and Infra-Red Imaging Characterization. Materials 2023, 16, 6202. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Lv, J.; Zheng, K.; Tao, J.; Qin, Y.; Wang, W.; Wang, C.; Liang, J. Multispectral radiometric temperature measurement algorithm for turbine blades based on moving narrow-band spectral windows. Opt. Express 2021, 29, 4405–4421. [Google Scholar] [CrossRef] [PubMed]
- Huang, A.; Cao, Z.; Zhao, W.; Zhang, H.; Xu, L. Frequency Division Multiplexing and Main Peak Scanning WMS Method for TDLAS Tomography in Flame Monitoring. IEEE Trans. Instrum. Meas. 2020, 69, 9087–9096. [Google Scholar] [CrossRef]
- Lackner, M. Tunable diode laser absorption spectroscopy (TDLAS) in the process industries—A review. Rev. Chem. Eng. 2007, 23, 65–147. [Google Scholar] [CrossRef]
- Bolshov, M.A.; Kuritsyn, Y.A.; Romanovskii, Y.V. Tunable diode laser spectroscopy as a technique for combustion diagnostics. Spectrochim. Acta Part B At. Spectrosc. 2015, 106, 45–66. [Google Scholar] [CrossRef]
- Gao, Y.G.; Liu, Y.; Dong, Z.C.; Ma, D.; Yang, B.; Qiu, C.C. Preliminary experimental study on combustion characteristics in a solid rocket motor nozzle based on the TDLAS system. Energy 2023, 268, 126741. [Google Scholar] [CrossRef]
- Song, A.C.; Qin, Z.; Li, J.W.; Li, M.; Huang, K.; Yang, Y.J.; Wang, N.F. Real-Time Plume Velocity Measurement of Solid Propellant Rocket Motors Using TDLAS Technique. Propellants Explos. Pyrotech. 2021, 46, 636–653. [Google Scholar] [CrossRef]
- Wang, J.; Hao, X.J.; Pan, B.W.; Huang, X.D.; Sun, H.L.; Pei, P. Spectroscopic measurement of the two-dimensional flame temperature based on a perovskite single photodetector. Opt. Express 2023, 31, 8098–8109. [Google Scholar] [CrossRef]
- Liu, X.; Hao, X.; Xue, B.; Tai, B.; Zhou, H. Two-dimensional flame temperature and emissivity distribution measurement based on element doping and energy spectrum analysis. IEEE Access 2020, 8, 200863–200874. [Google Scholar] [CrossRef]
- Nadir, Z. A Model Based Iterative Reconstruction Approach to Tunable Diode Laser Absorption Tomography. Ph.D. Thesis, Purdue University, West Lafayette, IN, USA, 2018. [Google Scholar]
- Bryner, E.; Sharma, M.; Diskin, G.; Mcdaniel, J.; Goyne, C.; Snyder, M.; Martin, E.; Krauss, R. Tunable Diode Laser Absorption Technique Development for Determination of Spatially Resolved Water Concentration and Temperature. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum & Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Martin, E.F.; Goyne, C.P.; Diskin, G.S. Analysis of a Tomography Technique for a Scramjet Wind Tunnel. Int. J. Hypersonics 2010, 1, 173–179. [Google Scholar] [CrossRef]
- Huang, A.; Cao, Z.; Zhao, W.; Zhang, H.; Xu, L. Fast Wavelength Modulated TDLAS Imaging System for Flame monitoring. In Proceedings of the 2019 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Auckland, New Zealand, 20–23 May 2019. [Google Scholar]
- Liu, C.; Cao, Z.; Lin, Y.Z.; Xu, L.J.; McCann, H. Online Cross-Sectional Monitoring of a Swirling Flame Using TDLAS Tomography. IEEE Trans. Instrum. Meas. 2018, 67, 1338–1348. [Google Scholar] [CrossRef]
- Xue, B.; Hao, X.; Liu, X.; Han, Z.; Zhou, H. Simulation of an NSGA-III Based Fireball Inner-Temperature-Field Reconstructive Method. IEEE Access 2020, 8, 43908–43919. [Google Scholar]
- Deng, A.; Huang, J.; Liu, H.; Cai, W. Deep learning algorithms for temperature field reconstruction of nonlinear tomographic absorption spectroscopy. Meas. Sens. 2020, 10, 100024. [Google Scholar] [CrossRef]
- Li, H.; Ren, T.; Liu, X.; Zhao, C. U-Net applied to retrieve two-dimensional temperature and CO2 concentration fields of laminar diffusion flames. Fuel 2022, 324, 124447. [Google Scholar] [CrossRef]
- Huang, J.; Liu, H.; Dai, J.; Cai, W. Reconstruction for limited-data nonlinear tomographic absorption spectroscopy via deep learning. J. Quant. Spectrosc. Radiat. Transf. 2018, 218, 187–193. [Google Scholar] [CrossRef]
- Chen, S.; Hao, X.; Pan, B.; Huang, X. Super-resolution residual U-Net model for the reconstruction of limited-data tunable diode laser absorption tomography. ACS Omega 2022, 7, 18722–18731. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Tsekenis, S.-A.; Polydorides, N.; McCann, H. Toward customized spatial resolution in TDLAS tomography. IEEE Sens. J. 2018, 19, 1748–1755. [Google Scholar] [CrossRef]
- Han, Y.; Ye, J.C. Framing U-Net via Deep Convolutional Framelets: Application to Sparse-View CT. IEEE Trans. Med. Imaging 2018, 37, 1418–1429. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Zhao, L.; Zhang, H. MR-UNet commodity semantic segmentation based on transfer learning. IEEE Access 2021, 9, 159447–159456. [Google Scholar] [CrossRef]
- Chung, J.; Gulcehre, C.; Cho, K.; Bengio, Y. Empirical Evaluation of Gated Recurrent Neural Networks on Sequence Modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Sun, P.; Zhang, Z.; Li, Z.; Guo, Q.; Dong, F. A Study of Two Dimensional Tomography Reconstruction of Temperature and Gas Concentration in a Combustion Field Using TDLAS. Appl. Sci. 2017, 7, 990. [Google Scholar] [CrossRef]
- Nosouhian, S.; Nosouhian, F.; Khoshouei, A.K. A review of recurrent neural network architecture for sequence learning: Comparison between LSTM and GRU. Preprints 2021, 2021070252. [Google Scholar] [CrossRef]
- Yamak, P.T.; Yujian, L.; Gadosey, P.K. A comparison between ARIMA, LSTM, and GRU for time series forecasting. In Proceedings of the 2019 2nd International Conference on Algorithms, Computing and Artificial Intelligence, Sanya, China, 20–22 December 2019; pp. 49–55. [Google Scholar]
- Targ, S.; Almeida, D.; Lyman, K. Resnet in Resnet: Generalizing residual architectures. arXiv 2016, arXiv:1603.08029. [Google Scholar]
- Li, S.; Ye, W.; Li, F. LU-Net: Combining LSTM and U-Net for sinogram synthesis in sparse-view SPECT reconstruction. Math. Biosci. Eng. 2022, 19, 4320–4340. [Google Scholar] [CrossRef] [PubMed]
- Si, J.J.; Fu, G.C.; Cheng, Y.B.; Zhang, R.; Enemali, G.; Liu, C. A Quality-Hierarchical Temperature Imaging Network for TDLAS Tomography. IEEE Trans. Instrum. Meas. 2022, 71, 4500710. [Google Scholar] [CrossRef]
- Zhao, R.; Zhou, B.; Zhang, J.; Cheng, R.; Liu, Q.; Dai, M.; Wang, B.; Wang, Y. Rapid online tomograph in non-uniform complex combustion fields based on laser absorption spectroscopy. Exp. Therm. Fluid Sci. 2023, 147, 110930. [Google Scholar] [CrossRef]
- Janocha, K.; Czarnecki, W.M. On loss functions for deep neural networks in classification. arXiv 2017, arXiv:1702.05659. [Google Scholar] [CrossRef]
- Mehta, S.; Paunwala, C.; Vaidya, B. CNN Based Traffic Sign Classification Using Adam Optimizer. In Proceedings of the 2019 international conference on intelligent computing and control systems (ICCS), Madurai, India, 15–17 May 2019; pp. 1293–1298. [Google Scholar]
- Sara, U.; Akter, M.; Uddin, M.S. Image quality assessment through FSIM, SSIM, MSE and PSNR—A comparative study. J. Comput. Commun. 2019, 7, 8–18. [Google Scholar] [CrossRef]
- Li, R.J.; Li, F.; Lin, X.; Yu, X.L. Error Analysis of Integrated Absorbance for TDLAS in a Nonuniform Flow Field. Appl. Sci. 2021, 11, 10936. [Google Scholar] [CrossRef]
- Lin, S.; Chang, J.; Sun, J.C.; Xu, P. Improvement of the Detection Sensitivity for Tunable Diode Laser Absorption Spectroscopy: A Review. Front. Phys. 2022, 10, 853966. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Projection Angle N | Single-Peak Distribution | Bimodal Distribution | Multimodal Distribution |
|---|---|---|---|
| N = 2 | 0.79% | 0.77% | 1.81% |
| N = 4 | 0.24% | 0.37% | 0.41% |
| N = 8 | 0.13% | 0.20% | 0.23% |
| N = 16 | 0.16% | 0.18% | 0.19% |
| Projection Angle N | Single-Peak Distribution | Bimodal Distribution | Multimodal Distribution |
|---|---|---|---|
| N = 2 | 3.12% | 2.43% | 6.50% |
| N = 4 | 2.77% | 2.08% | 1.98% |
| N = 8 | 1.13% | 1.16% | 1.54% |
| N = 16 | 0.73% | 1.12% | 1.13% |
| Projection Angle N | Methods | PSNR | SSIM | Error |
|---|---|---|---|---|
| N = 2 | Interpolation | 20.139 | 0.446 | 18.26% |
| UNet | 30.823 | 0.814 | 2.16% | |
| GMResUNet | 32.996 | 0.985 | 0.96% | |
| N = 4 | Interpolation | 25.694 | 0.592 | 13.62% |
| UNet | 34.456 | 0.835 | 1.31% | |
| GMResUNet | 40.726 | 0.997 | 0.35% | |
| N = 8 | Interpolation | 28.536 | 0.603 | 8.03% |
| UNet | 38.144 | 0.867 | 0.54% | |
| GMResUNet | 44.977 | 0.998 | 0.20% | |
| N = 16 | Interpolation | 32.585 | 0.780 | 5.34% |
| UNet | 43.684 | 0.933 | 0.32% | |
| GMResUNet | 46.572 | 0.998 | 0.18% |
| Projection Angle N | Methods | PSNR | SSIM | Error |
|---|---|---|---|---|
| N = 2 | CNN | 28.510 | 0.921 | 5.00% |
| U-Net | 30.503 | 0.942 | 3.74% | |
| N = 4 | CNN | 31.543 | 0.954 | 3.45% |
| U-Net | 34.969 | 0.964 | 2.07% | |
| N = 8 | CNN | 35.456 | 0.957 | 3.00% |
| U-Net | 36.955 | 0.984 | 1.32% | |
| N =16 | CNN | 37.166 | 0.961 | 2.37% |
| U-Net | 39.827 | 0.987 | 1.05% |
| Projection Angle N | Composite State | PSNR | SSIM | Error |
|---|---|---|---|---|
| N = 2 | Incomplete view | - | - | - |
| Synthetic multi-view | 30.503 | 0.942 | 3.74% | |
| N = 4 | Incomplete view | 33.522 | 0.953 | 3.43% |
| Synthetic multi-view | 34.969 | 0.964 | 2.07% | |
| N = 8 | Incomplete view | 36.423 | 0.969 | 1.68% |
| Synthetic multi-view | 36.955 | 0.984 | 1.32% | |
| N = 16 | Incomplete view | 38.821 | 0.987 | 1.23% |
| Synthetic multi-view | 39.827 | 0.987 | 1.05% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, Y.; Hao, X.; Huang, X.; Pei, P.; Li, S.; Wei, T. Multi-View Synthesis of Sparse Projection of Absorption Spectra Based on Joint GRU and U-Net. Appl. Sci. 2024, 14, 3726. https://doi.org/10.3390/app14093726
Shi Y, Hao X, Huang X, Pei P, Li S, Wei T. Multi-View Synthesis of Sparse Projection of Absorption Spectra Based on Joint GRU and U-Net. Applied Sciences. 2024; 14(9):3726. https://doi.org/10.3390/app14093726
Chicago/Turabian StyleShi, Yanhui, Xiaojian Hao, Xiaodong Huang, Pan Pei, Shuaijun Li, and Tong Wei. 2024. "Multi-View Synthesis of Sparse Projection of Absorption Spectra Based on Joint GRU and U-Net" Applied Sciences 14, no. 9: 3726. https://doi.org/10.3390/app14093726
APA StyleShi, Y., Hao, X., Huang, X., Pei, P., Li, S., & Wei, T. (2024). Multi-View Synthesis of Sparse Projection of Absorption Spectra Based on Joint GRU and U-Net. Applied Sciences, 14(9), 3726. https://doi.org/10.3390/app14093726