
A Calibration Method for Nonlinear Mismatches in M-Channel Time-Interleaved Analog-to-Digital Converters Based on Hadamard Sequences


Abstract
:1. Introduction
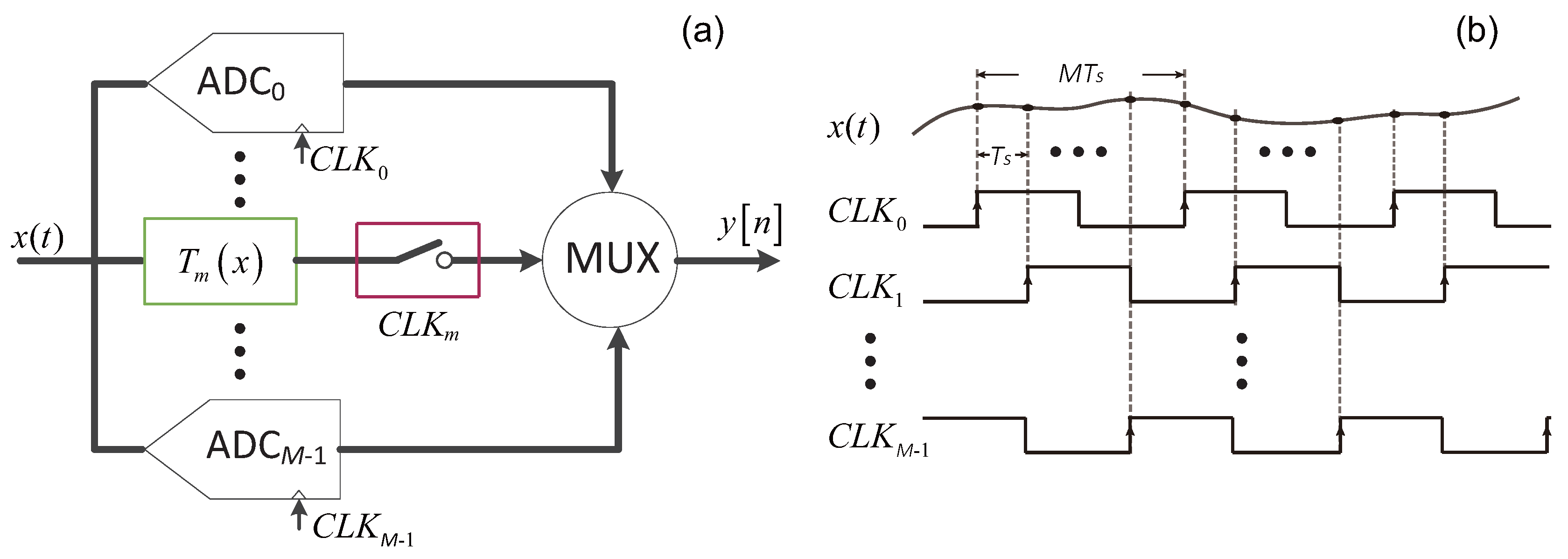
2. Nonlinear Mismatches in M-TIADC
2.1. Mismatch-Induced Error Signal
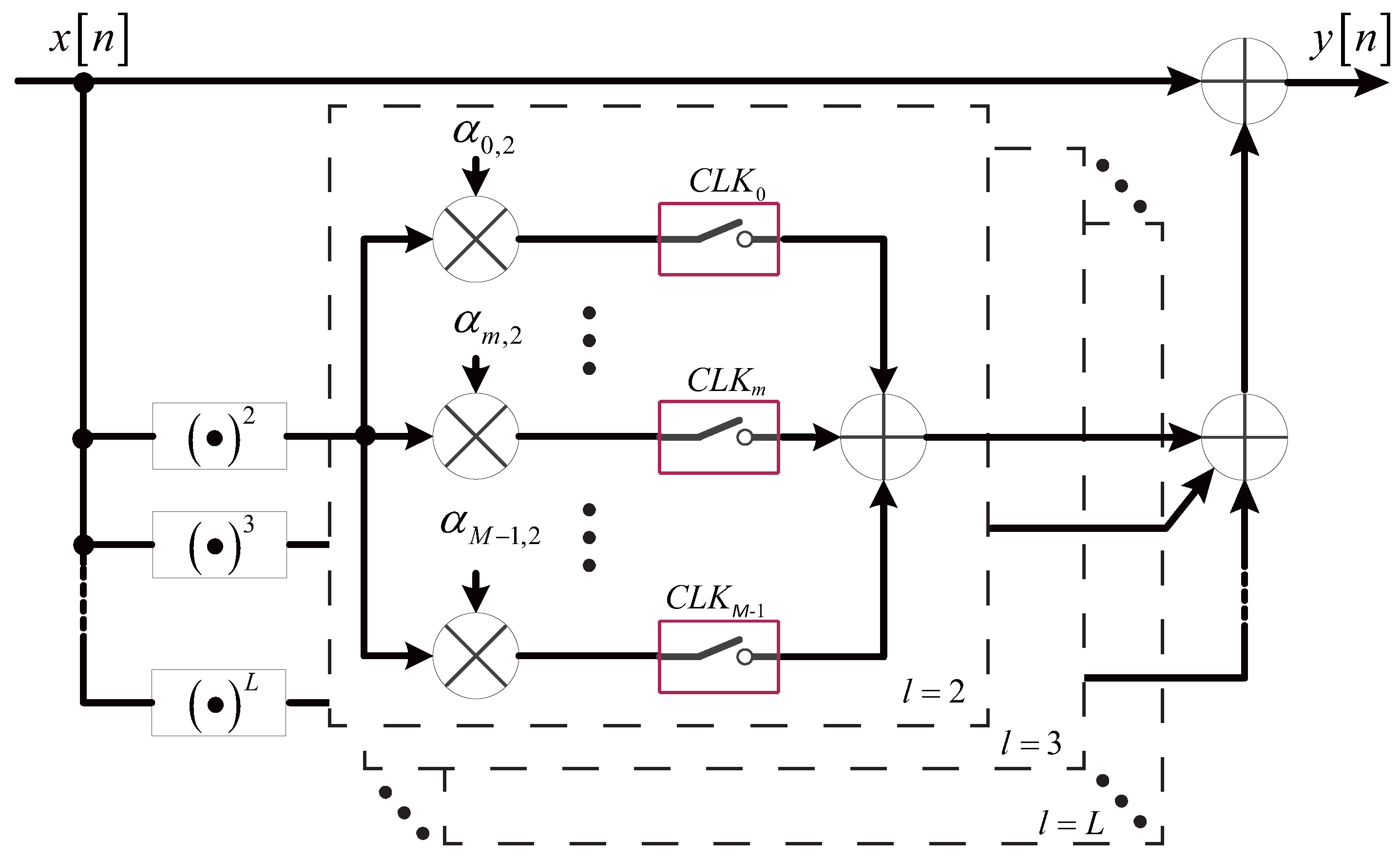
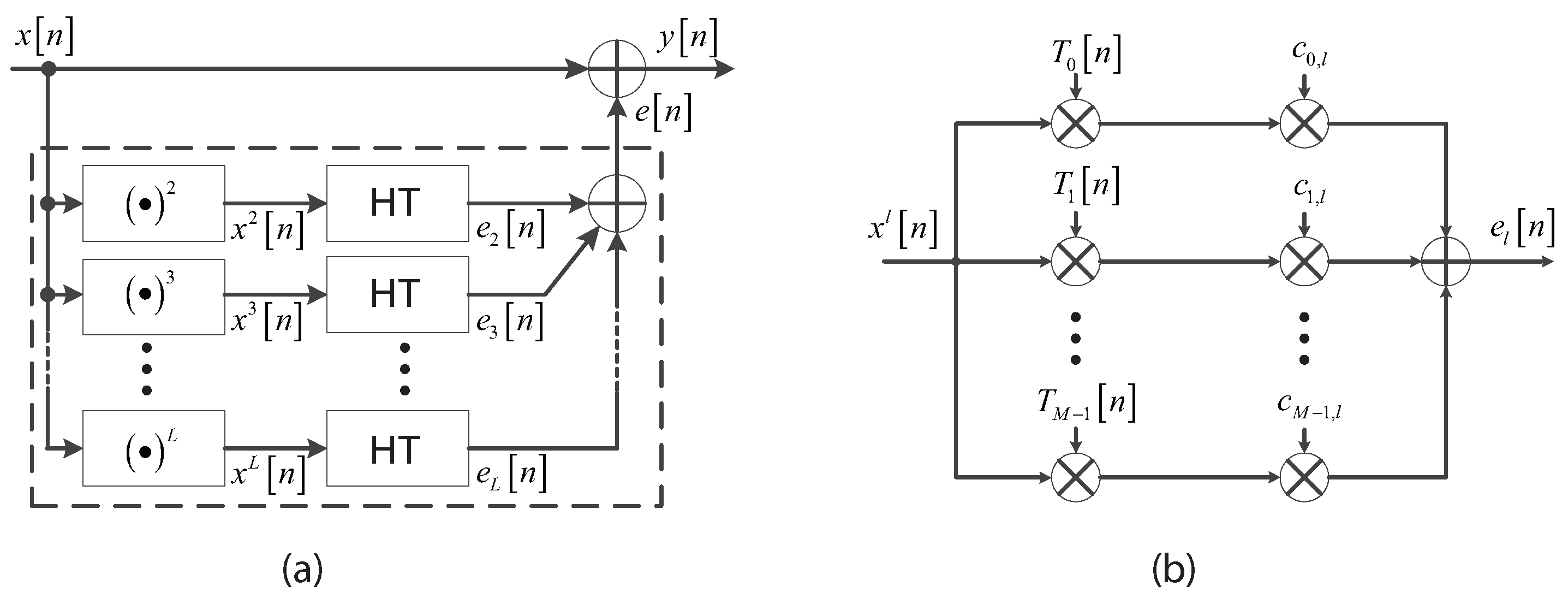
2.2. Model of M-TIADC Exploiting Hadamard Sequences
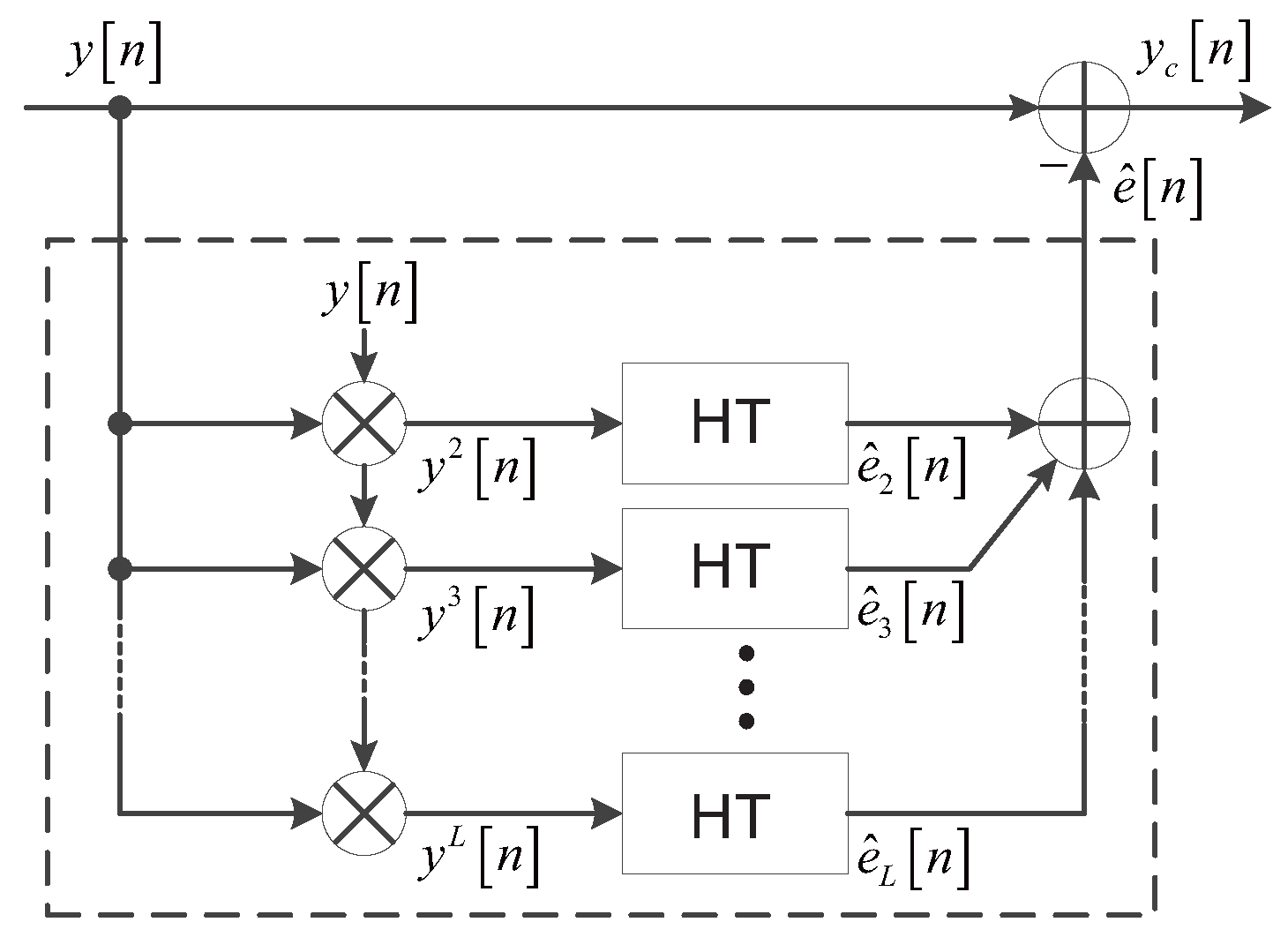
3. Adaptive Background Calibration Method
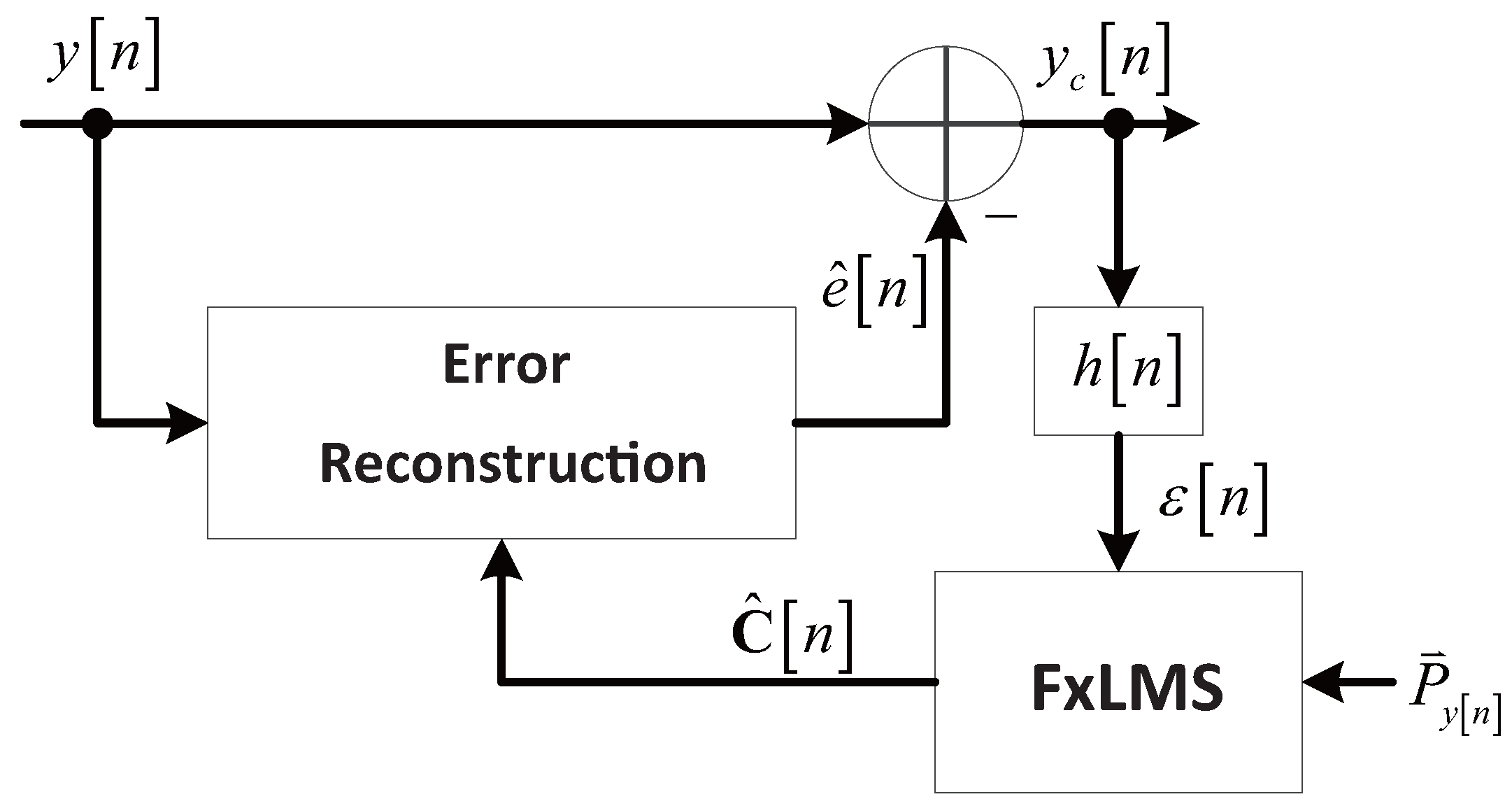
3.1. Calibration Structure
3.2. Mismatch Coefficients Estimation
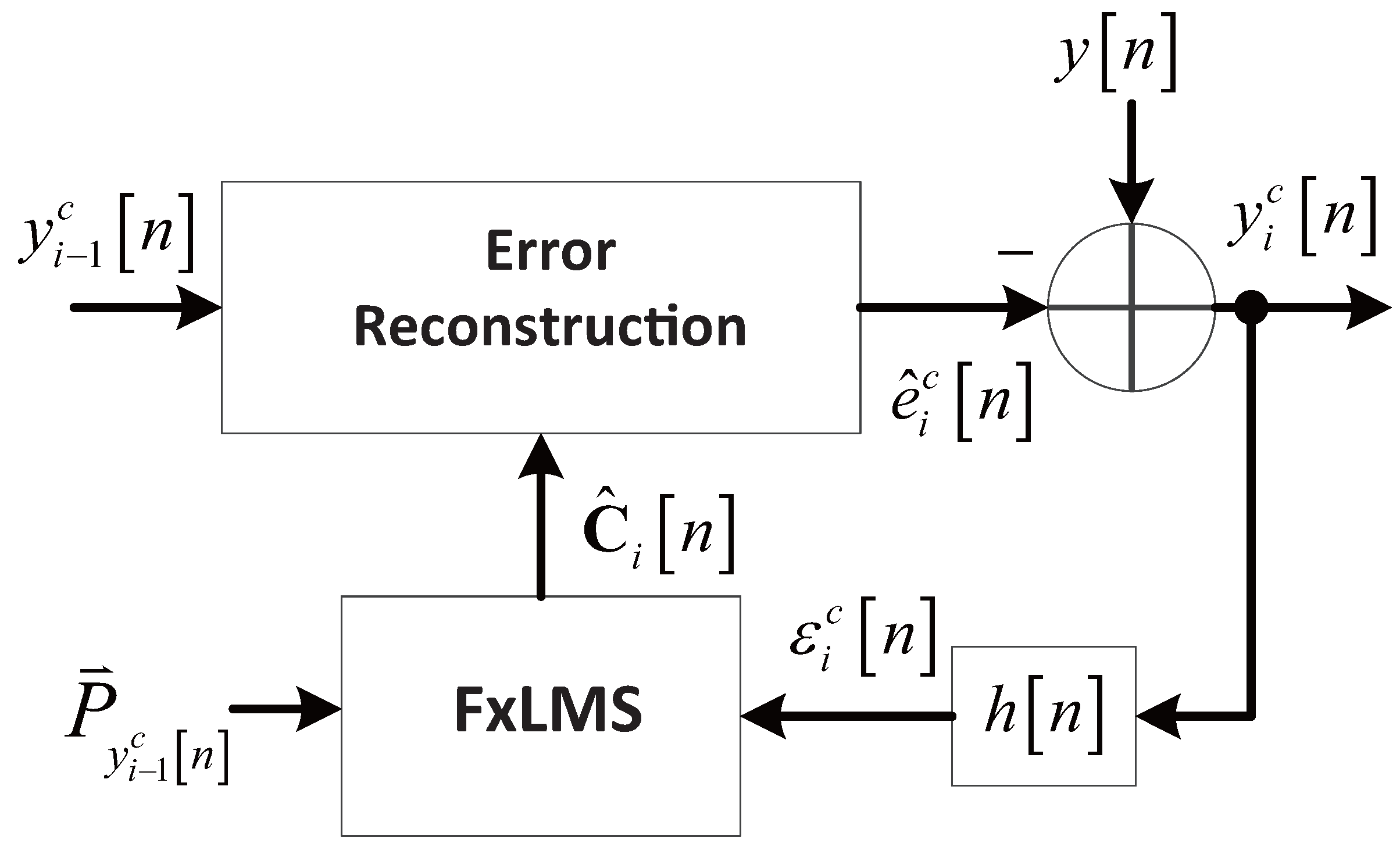
3.3. Cascade Calibration Structure
4. Simulation Results
4.1. Calibration Performance with Different Numbers of Channels
4.2. Calibration Performance with Different Input Signals
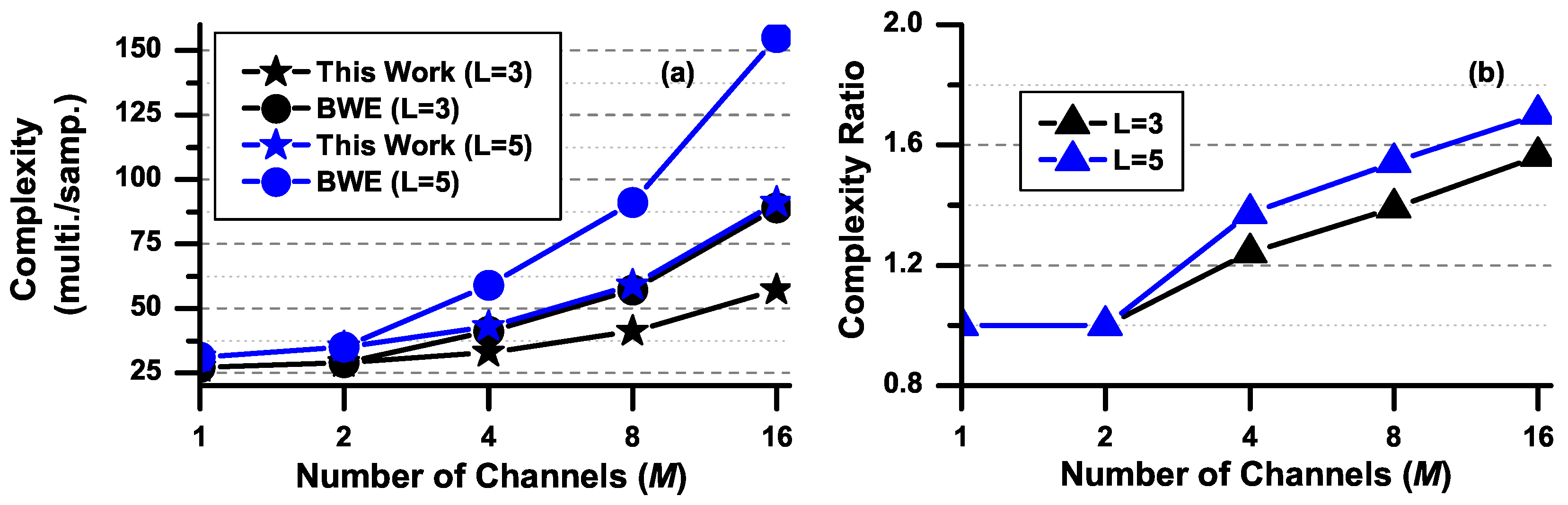
4.3. Computational Complexity
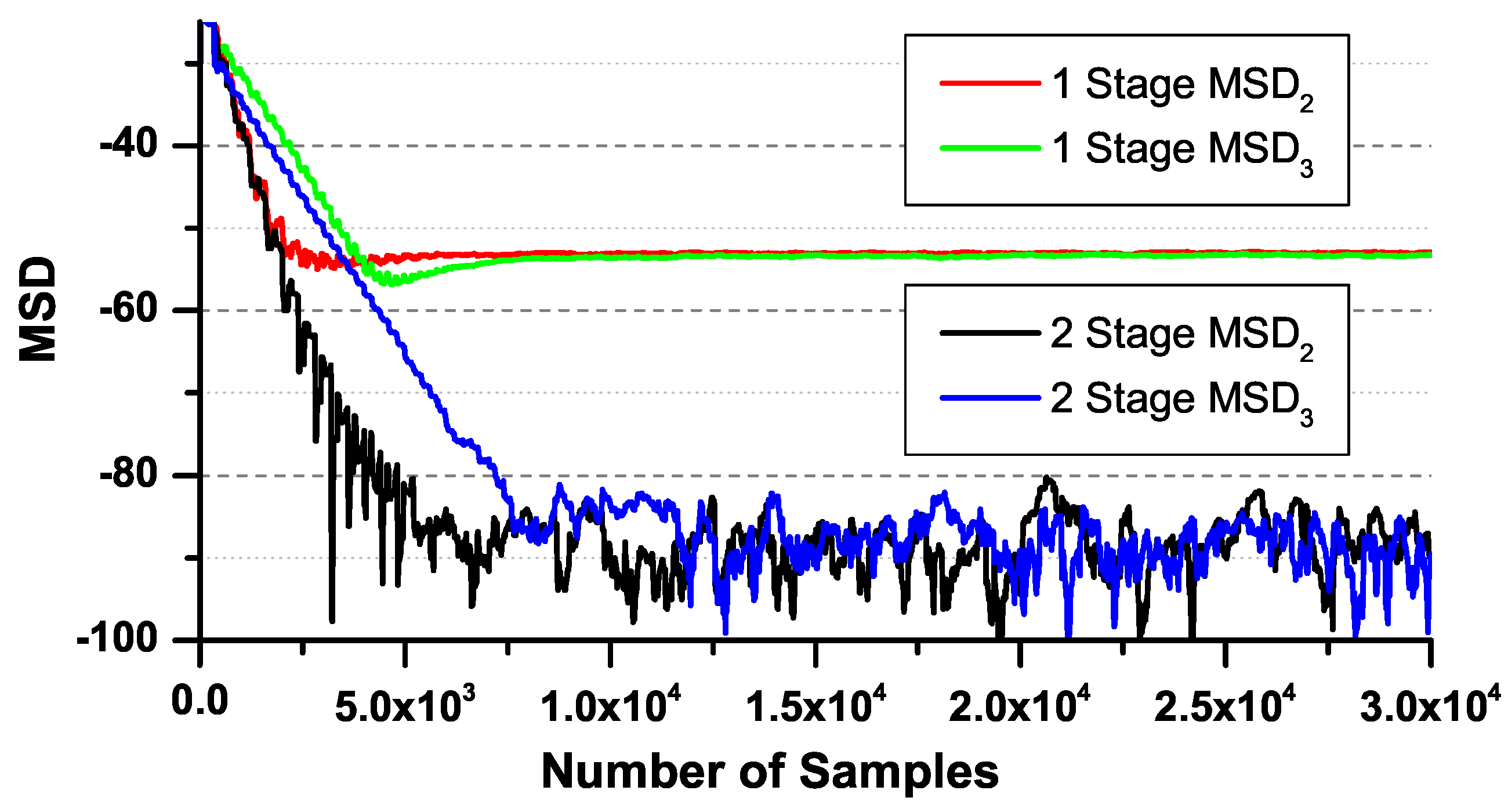
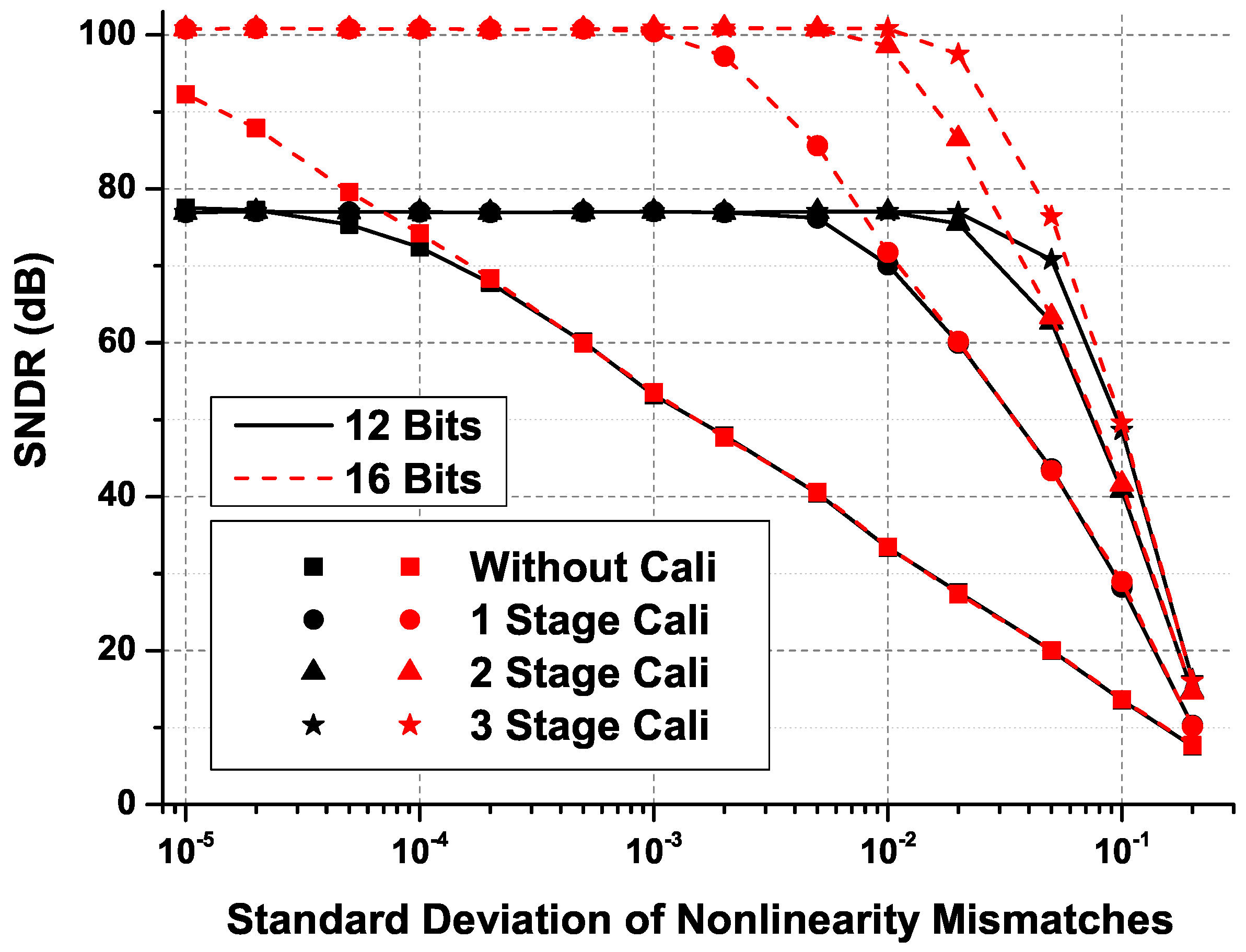
4.4. Performance of the Cascade Structure
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bonnetat, A.; Hode, J.M.; Ferre, G.; Dallet, D. An adaptive all-digital blind compensation of dual-TIADC frequency-response mismatch based on complex signal correlations. IEEE Trans. Circ. Syst. II Express Briefs 2015, 62, 821–825. [Google Scholar] [CrossRef]
- Bonnetat, A.; Hode, J.M.; Ferre, G.; Dallet, D. Correlation-based frequency-response mismatch compensation of quad-TIADC using real samples. IEEE Trans. Circ. Syst. II Express Briefs 2015, 62, 746–750. [Google Scholar] [CrossRef]
- Singh, S.; Anttila, L.; Epp, M.; Schlecker, W.; Valkama, M. Frequency response mismatches in 4-channel time-interleaved ADCs: Analysis, blind identification, and correction. IEEE Trans. Circ. Syst. I Regul. Pap. 2015, 62, 2268–2279. [Google Scholar] [CrossRef]
- Singh, S.; Anttila, L.; Epp, M.; Schlecker, W.; Valkama, M. Analysis, blind identification, and correction of frequency response mismatch in two-channel time-interleaved ADCs. IEEE Trans. Microw. Theory Tech. 2015, 63, 1721–1734. [Google Scholar] [CrossRef]
- Singh, S.; Valkama, M.; Epp, M.; Schlecker, W. Digitally enhanced wideband I/Q downconversion receiver with 2-channel time-interleaved ADCs. IEEE Trans. Circ. Syst. II Express Briefs 2016, 63, 29–33. [Google Scholar] [CrossRef]
- Singh, S.; Valkama, M.; Epp, M.; Schlecker, W. Frequency response mismatch analysis in time-interleaved analog I/Q processing and ADCs. IEEE Trans. Circ. Syst. II Express Briefs 2015, 62, 608–612. [Google Scholar] [CrossRef]
- Li, J.; Wu, S.; Liu, Y.; Ning, N.; Yu, Q. A digital timing mismatch calibration technique in time-interleaved ADCs. IEEE Trans. Circ. Syst. II Express Briefs 2014, 61, 486–490. [Google Scholar] [CrossRef]
- Matsuno, J.; Yamaji, T.; Furuta, M.; Itakura, T. All-digital background calibration technique for time-interleaved ADC using pseudo aliasing signal. IEEE Trans. Circ. Syst. I Regul. Pap. 2013, 60, 1113–1121. [Google Scholar] [CrossRef]
- Zou, Y.X.; Xu, X.J. Blind timing skew estimation using source spectrum sparsity in time-interleaved ADCs. IEEE Trans. Instrum. Meas. 2012, 61, 2401–2412. [Google Scholar] [CrossRef]
- Saleem, S.; Vogel, C. Adaptive blind background calibration of polynomial-represented frequency response mismatches in a two-channel time-interleaved ADC. IEEE Trans. Circ. Syst. I Regul. Pap. 2011, 58, 1300–1310. [Google Scholar] [CrossRef]
- Tsui, K.M.; Chan, S.C. New iterative framework for frequency response mismatch correction in time-interleaved ADCs: Design and performance analysis. IEEE Trans. Instrum. Meas. 2011, 60, 3792–3805. [Google Scholar] [CrossRef] [Green Version]
- Divi, V.; Wornell, G.W. Blind calibration of timing skew in time-interleaved analog-to-digital converters. IEEE J. Sel. Top. Signal Process. 2009, 3, 509–522. [Google Scholar] [CrossRef]
- Johansson, H. A polynomial-based time-varying filter structure for the compensation of frequency-response mismatch errors in time-interleaved ADCs. IEEE J. Sel. Top. Signal Process. 2009, 3, 384–396. [Google Scholar] [CrossRef]
- Satarzadeh, P.; Levy, B.C.; Hurst, P.J. Adaptive semiblind calibration of bandwidth mismatch for two-channel time-interleaved ADCs. IEEE Trans. Circ. Syst. I Regul. Pap. 2009, 56, 2075–2088. [Google Scholar] [CrossRef]
- Vogel, C.; Mendel, S. A flexible and scalable structure to compensate frequency response mismatches in time-interleaved ADCs. IEEE Trans. Circ. Syst. I Regul. Pap. 2009, 56, 2463–2475. [Google Scholar] [CrossRef]
- Huang, S.; Levy, B.C. Blind calibration of timing offsets for four-channel time-interleaved ADCs. IEEE Trans. Circ. Syst. I Regul. Pap. 2007, 54, 863–876. [Google Scholar] [CrossRef]
- Huang, S.; Levy, B.C. Adaptive blind calibration of timing offset and gain mismatch for two-channel time-interleaved ADCs. IEEE Trans. Circ. Syst. I Regul. Pap. 2006, 53, 1278–1288. [Google Scholar] [CrossRef]
- Tsai, T.H.; Hurst, P.J.; Lewis, S.H. Bandwidth mismatch and its correction in time-interleaved analog-to-digital converters. IEEE Trans. Circ. Syst. II Express Briefs 2006, 53, 1133–1137. [Google Scholar] [CrossRef]
- Wang, C.Y.; Wu, J.T. A background timing-skew calibration technique for time-interleaved analog-to-digital converters. IEEE Trans. Circ. Syst. II Express Briefs 2006, 53, 299–303. [Google Scholar] [CrossRef]
- Jamal, S.M.; Fu, D.; Singh, M.P.; Hurst, P.J.; Lewis, S.H. Calibration of sample-time error in a two-channel time-interleaved analog-to-digital converter. IEEE Trans. Circ. Syst. I Regul. Pap. 2004, 51, 130–139. [Google Scholar] [CrossRef]
- Kurosawa, N.; Kobayashi, H.; Kobayashi, K. Channel linearity mismatch effects in time-interleaved ADC systems. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2002, 85, 749–756. [Google Scholar]
- Simoes, J.B.; Landeck, J.; Correia, C.M.B.A. Nonlinearity of a data-acquisition system with interleaving/multiplexing. IEEE Trans. Instrum. Meas. 1997, 46, 1274–1279. [Google Scholar] [CrossRef]
- Goodman, J.; Miller, B.; Herman, M.; Raz, G.; Jackson, J. Polyphase nonlinear equalization of time-interleaved analog-to-digital converters. IEEE J. Sel. Top. Signal Process. 2009, 3, 362–373. [Google Scholar] [CrossRef]
- Centurelli, F.; Monsurro, P.; Trifiletti, A. Improved digital background calibration of time-interleaved pipeline A/D converters. IEEE Trans. Circ. Syst. II Express Briefs 2013, 60, 86–90. [Google Scholar] [CrossRef]
- Wang, Y.; Johansson, H.; Xu, H.; Diao, J. Bandwidth-efficient calibration method for nonlinear errors in M-channel time-interleaved ADCs. Analog Integr. Circ. Signal Process. 2016, 86, 275–288. [Google Scholar] [CrossRef]
- Wang, Y.; Hui, X.; Johansson, H.; Zhaolin, S.; Wikner, J. Digital estimation and compensation method for nonlinearity mismatches in time-interleaved analog-to-digital converters. Digit. Signal Process. 2015, 41, 130–141. [Google Scholar] [CrossRef]
- Wang, Y.; Johansson, H.; Hui, X.; Zhaolin, S. Joint blind calibration for mixed mismatches in two-channel time-interleaved ADCs. IEEE Trans. Circ. Syst. I Regul. Pap. 2015, 62, 1508–1517. [Google Scholar] [CrossRef]
- Wang, Y.; Johansson, H.; Xu, H. Adaptive background estimation for static nonlinearity mismatches in two-channel TIADCs. IEEE Trans. Circ. Syst. II Express Briefs 2015, 62, 226–230. [Google Scholar] [CrossRef]
- Vogel, C.; Kubin, G. Modeling of time-interleaved ADCs with nonlinear hybrid filter banks. AEU Int. J. Electron. Commun. 2005, 59, 288–296. [Google Scholar] [CrossRef]
- Asami, K.; Suzuki, T.; Miyajima, H.; Taura, T.; Kobayashi, H. Technique to improve the performance of time-interleaved AD converters with mismatches of non-linearity. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2009, 92, 374–380. [Google Scholar] [CrossRef]
- Vogel, C.; Kubin, G. Analysis and compensation of nonlinearity mismatches in time-interleaved ADC arrays. In Proceedings of the 2004 International Symposium on Circuits and Systems, Vancouver, BC, Canada, 23–26 May 2004; Volume 1, pp. I-593–I-596.
- Liu, H.; Xu, H. A calibration method for frequency response mismatches in M-channel time-interleaved analog-to-digital converters. IEICE Electron. Express 2016. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | This Work | BWE [25] |
|---|---|---|
| Number of channels | ||
| Bandwidth efficiency | ||
| Elements of modulation sequences | ||
| Complexity (multipliers/sample) |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Wang, Y.; Li, N.; Xu, H. A Calibration Method for Nonlinear Mismatches in M-Channel Time-Interleaved Analog-to-Digital Converters Based on Hadamard Sequences. Appl. Sci. 2016, 6, 362. https://doi.org/10.3390/app6110362
Liu H, Wang Y, Li N, Xu H. A Calibration Method for Nonlinear Mismatches in M-Channel Time-Interleaved Analog-to-Digital Converters Based on Hadamard Sequences. Applied Sciences. 2016; 6(11):362. https://doi.org/10.3390/app6110362
Chicago/Turabian StyleLiu, Husheng, Yinan Wang, Nan Li, and Hui Xu. 2016. "A Calibration Method for Nonlinear Mismatches in M-Channel Time-Interleaved Analog-to-Digital Converters Based on Hadamard Sequences" Applied Sciences 6, no. 11: 362. https://doi.org/10.3390/app6110362
APA StyleLiu, H., Wang, Y., Li, N., & Xu, H. (2016). A Calibration Method for Nonlinear Mismatches in M-Channel Time-Interleaved Analog-to-Digital Converters Based on Hadamard Sequences. Applied Sciences, 6(11), 362. https://doi.org/10.3390/app6110362