1. Introduction
The rapidly growing demand for passenger and commercial vehicles increases the number of road accidents around the world. In addition to their negative influence on road safety, accidents also have an indirect harmful impact on the environment and cause threats to human health and life. In cases when the human factor plays an important role, modern electronics and control systems may support the driver’s reaction and skills to improve the stability and performance of the vehicle and avoid accidents. Two of the most important on-board safety systems are ABS and ESP. Both systems have become mandatory for all passenger vehicles and most commercial vehicles. The ABS and ESP safety features in vehicle dynamics control have been known for a long time. However, the existing control algorithms are rarely investigated from the viewpoint of robust operation in different road conditions. Many of the results discussed in the published studies are describing simple maneuvers, such as straight-line braking with a uniform road surface. Few investigations are known for emergency braking on complex road profiles, such as a curved road with split-µ or a curved road with varying tire–road friction coefficients.
Within the framework of the presented study, fuzzy theory has been selected for the controller implementation. The fuzzy logic controllers (FLC) are known as efficient tools in solving complex tasks such as ABS and ESP control. A combination of ABS and ESP can solve the robustness problem of the braking performance. To confirm it, the FLC-based braking will be discussed for the different complex maneuvers such as a combination of road profiles and split-µ road surfaces.
The first ABS applications arose several decades ago [
1] and still use rule-based methods as the dominant control approach. In the modern ABS systems installed in commercial vehicles, the braking pressure is increased or reduced based on the wheel speed and the slip switching threshold comparison [
1]. The slip is set to a constant value, for instance 20% as it is optimal for the most common surface—dry asphalt. The braking surface is not recognized and the threshold value is equal for every road condition. This approach leads to energy losses because each road adhesive characteristic requires its optimal wheel slip value. This is why many researchers have focused on intelligent control algorithms for braking processes, trying to estimate an optimal one for every road condition slip threshold.
However, the analysis of the bibliography presented in [
2] shows that nowadays the FLC is also being intensively used in ABS and ESP design. One of the first ABS control mechanisms based on the fuzzy algorithm was patented in 1989 by the Nissan Motor Co., Ltd., (Yokohama, Japan) [
3]. Furthermore, many other solutions based on the FLC were proposed. Thanks to its simplicity and robustness, FLC proved to be equally applicable to on-road [
4] and off-road vehicles [
5].
In [
6], a model reference adaptive control (MRAC) was introduced to tune the FLC in order to be able to control all kinds of nonlinear systems. Furthermore, the MRAC was used in a braking system in [
7] as an ABS intelligent control. The simulation results were shown for a variety of road conditions (from icy to wet). The proposed solution requires a reference slip value, which is set to 20% for any kind of road surface. A similar assumption for the constant value of the optimal wheel slip is also proposed for ABS, as described in [
8]. Another example is the model-based Takagi–Sugeno (T–S) FLC designed for a single-car model [
9]. The controller copes well in optimal braking wheel slip maintenance, which the model considers a reference constant. Many different fuzzy proportional-integral-derivative (PID) approaches were also investigated [
10,
11,
12]. Yet the results are limited because the situation considered in most cases is braking on a straight road with an optimal slip of 20%.
Adaptive and self-tuning intelligent FLC solutions have also been introduced in various studies [
13,
14]. In [
15] a genetic neural FLC is designed, where the algorithm requires the reference wheel slip profile. The approach with the estimation of road parameters is used in [
16], where various roads can be identified to keep the optimal slip by the controller. This controller demonstrated good performance but its operation was illustrated for simple straight braking maneuvers.
Many studies have presented the validation of fuzzy-based ABS algorithms through tests on a hardware-in-the-loop (HIL) experimental setup or ABS test bench connected to the real-time vehicle software simulator. For example, in [
17] the authors introduced the fuzzy ABS with the road friction estimation algorithm. Consequently, the experiments were conducted for the variable road conditions proving the FLC robustness. In [
18] the ABS algorithm holds the optimal wheel slip for different roads and is validated for quarter-car HIL systems.
For complex braking maneuvers on split-µ surfaces and curved roads the activation of the ESP system can be required. In this field, fuzzy logic methods are also finding wide application. For example, patents have been issued to FLC control algorithm, where yaw rate and steering wheel angle signals were considered the control inputs to maintain vehicle stability during braking [
19]. Nevertheless, the described controller is still P or PD FLC, which requires the reference input.
In addition, many known examples are validated for specific maneuvers only. In particular, the PID FLC for yaw motion control [
20,
21] was investigated on double line maneuvers. The FLC neural network [
22] shows the experimentation results conducted for split-µ straight road maneuvers. The T–S FLC [
23] and fuzzy robust H∞ [
24] methods were tested on line change maneuvers. The authors in [
25] have integrated yaw moment and active front steering controllers based on the FLC. The results are demonstrated by the single line change maneuvers.
It should be noted that the use of simple maneuvers for the controller validation cannot demonstrate the FLC robustness. In reality, the driver deals with different road scenarios. Therefore, the controller applicability has to be studied on more complex and different braking maneuvers such as emergency braking on curved split-µ or variable road surfaces to assure controller robustness. Moreover, the reference slip direct control does not guarantee safety assistance on the split-µ surfaces as the steerability is not preserved. This issue must also be addressed.
As suggested in many previous studies, controllers as well as the currently installed systems in the vehicles set the slip value at 20% for any kind of roads. On the one hand, such an approach can be enough to maintain the steering ability. On the other hand, it leads to a decline in braking performance. For example, on average the optimal slip for icy roads is between 7% and 10%. Thus λ = 20% would cause a more than 50% loss of braking performance and the vehicle operation would become unstable, i.e., a diminution in steerability. Therefore, by holding the optimal wheel slip value and avoiding the controller restriction with reference variable, as it is proposed in the current paper, the effectiveness and energy efficiency of the braking process is maintained [
1] (pp. 74–94).
This paper contributes to the advancement of ABS and brake-based ESP systems using FLC. In particular, the article describes the research results connected with the following topics:
ESP and ABS control combination, both designed using fuzzy theory.
Use of a 10 degrees-of-freedom (10 DOF) four-wheel vehicle model in the controller.
Demonstration of the control robustness on different road surfaces and profiles.
The paper is organized as follows. The next section is dedicated to vehicle dynamics and model parameterization.
Section 3 explains the FLC design. The
Section 4 is devoted to the experimental facilities. Next, the simulation outcomes are provided. Conclusions are summarized in
Section 6.
3. Fuzzy Logic Control Design
When the dynamical behavior of the object is studied, the controller is ready to be designed. One of the advantages of the solution described in this paper is that the controller requires the input variables, for which signals are transmitted in real time by the sensors available in modern vehicles.
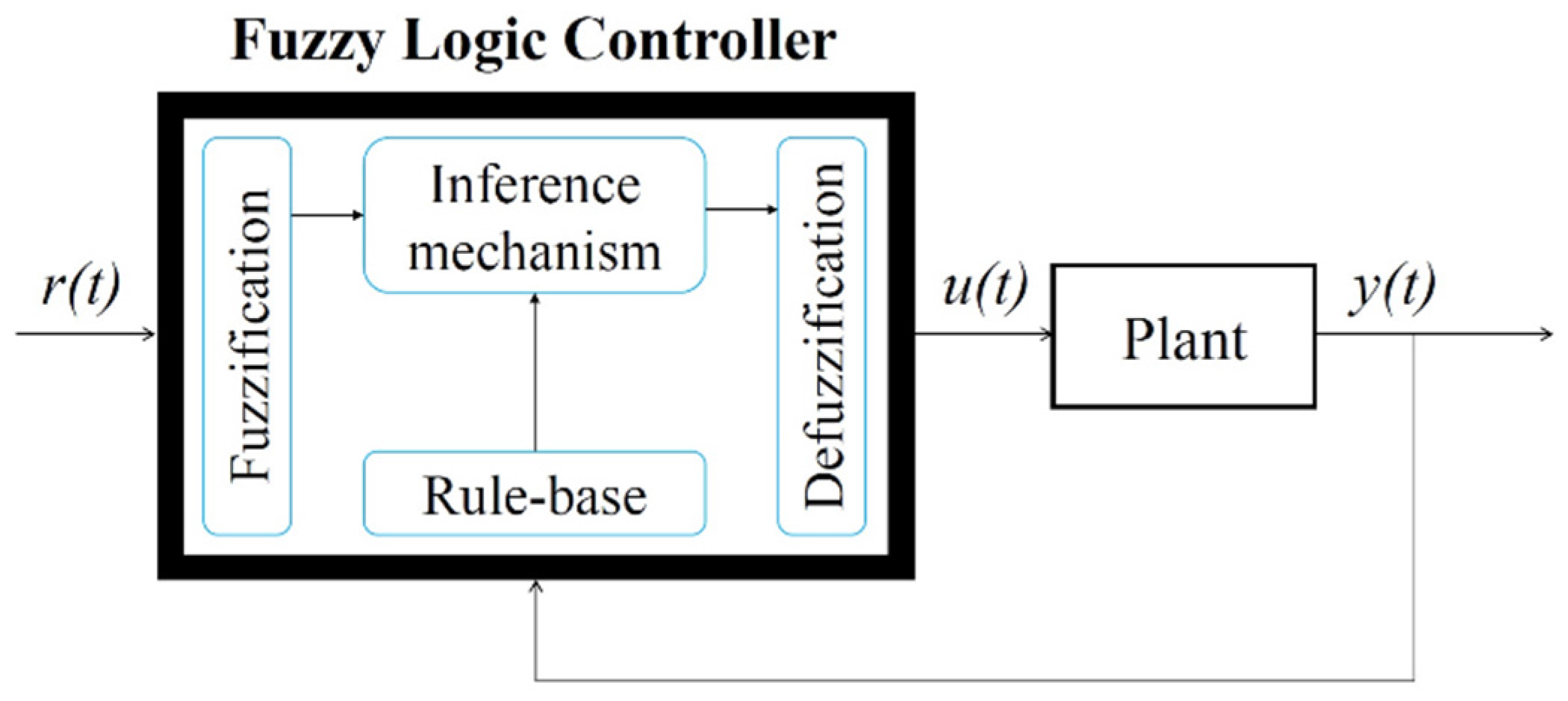
The fuzzy logic controller architecture is shown in
Figure 3. In this case the plant is a vehicle model. The FLC consists of four design steps. Fuzzification is the process of converting the “crisp” (real number) input into fuzzy sets. A fuzzy set in turn is a pair consisting of an element in UOD and membership degree. The inference mechanism (engine) is used to turn the fuzzy input into a fuzzy output, using the composed rule-base block. Finally, defuzzification converts the fuzzy output into a numerical value.
The MATLAB® (Natick, MA, USA) Fuzzy Logic Toolbox™ is used to design the FLC. At the beginning, the inputs and outputs must be stated. Two separate FLCs for ABS and ESP are introduced and combined to obtain robust brake and stability control.
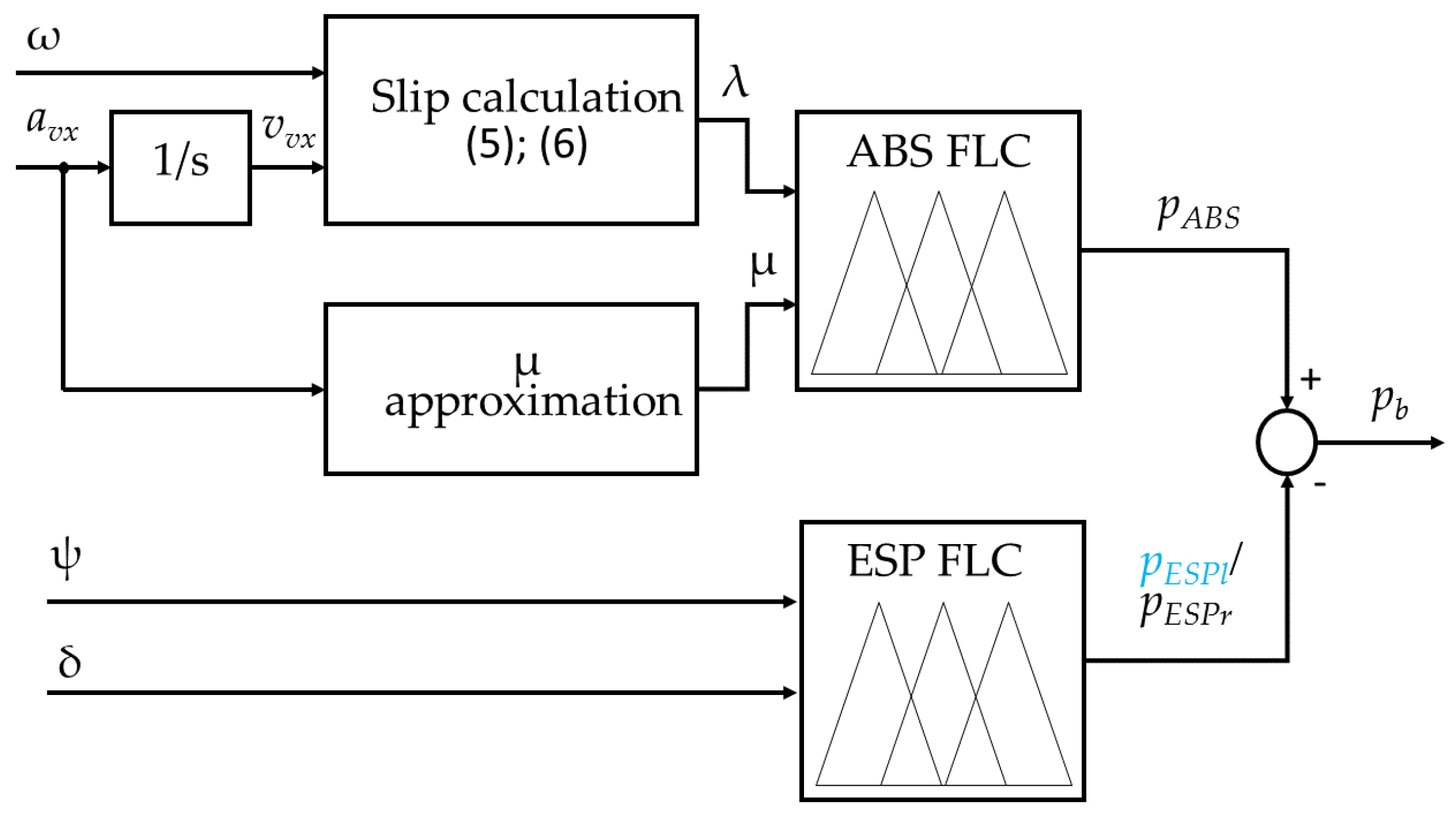
The block diagram scheme for a single wheel is presented in
Figure 4. The anti-lock braking system controller involves longitudinal wheel speeds and vehicle acceleration. Using Equations (5) and (6), the slip for each wheel λ
i is calculated and the variable serves as an input. The second input is the tire–road friction coefficient, which corresponds to the vehicle body acceleration and is donated as µ
x, as stated in Equation (8).
The ABS is activated together with the braking pedal displacement. When the vehicle velocity is lower than 8 km/h, the ABS does not function because, after the vehicle speed of 8 km/h, the distance traveled with locked wheels is not critical. The activation requirements are taken from [
1] (pp. 74–94).
As soon as the emergency brake (full pedal actuation) is deployed, before the ABS is activated, the controller has enough time to measure the car’s maximum deceleration and use it as a constant variable to understand the road surface. Moreover, the controller resets the µx variable every second and the maximum value of avx is measured again. The fast reset has no effect on driving comfort as the process is very rapid. The reset is necessary for the FLC to understand if the road condition has remained the same, for example, when the road changes from a dry to an icy surface.
The inputs of the ESP are the angular velocity of the vehicle about the vertical axis ψ and the steering wheel angle δ operated by the driver (
Figure 4). The ESP is activated together with the braking pedal and deactivates when the vehicle speed is below 8 km/h.
The output of the ABS and the ESP is the braking pressure. The yaw controller has no impact when the yaw moment is not created, thus only ABS is responsible for efficient braking on a straight homogeneous road.
The ESP FLC controls both sides of the vehicle. It either regulates the right or left pair of the vehicle wheels, depending on the body yaw rate direction. According to the curves in
Figure 2, the front and rear wheels require different optimal wheel slip values. Therefore, the front and rear wheels will have different membership functions (MFs) for the λ input in ABS. Consequently, each wheel has a different controller. When the yaw FLC understands that the driver is losing vehicle control, it reduces the braking pressure from the side of the car, in which direction the vehicle starts to spin around its center of gravity (COG). Otherwise, only the ABS control is operating.
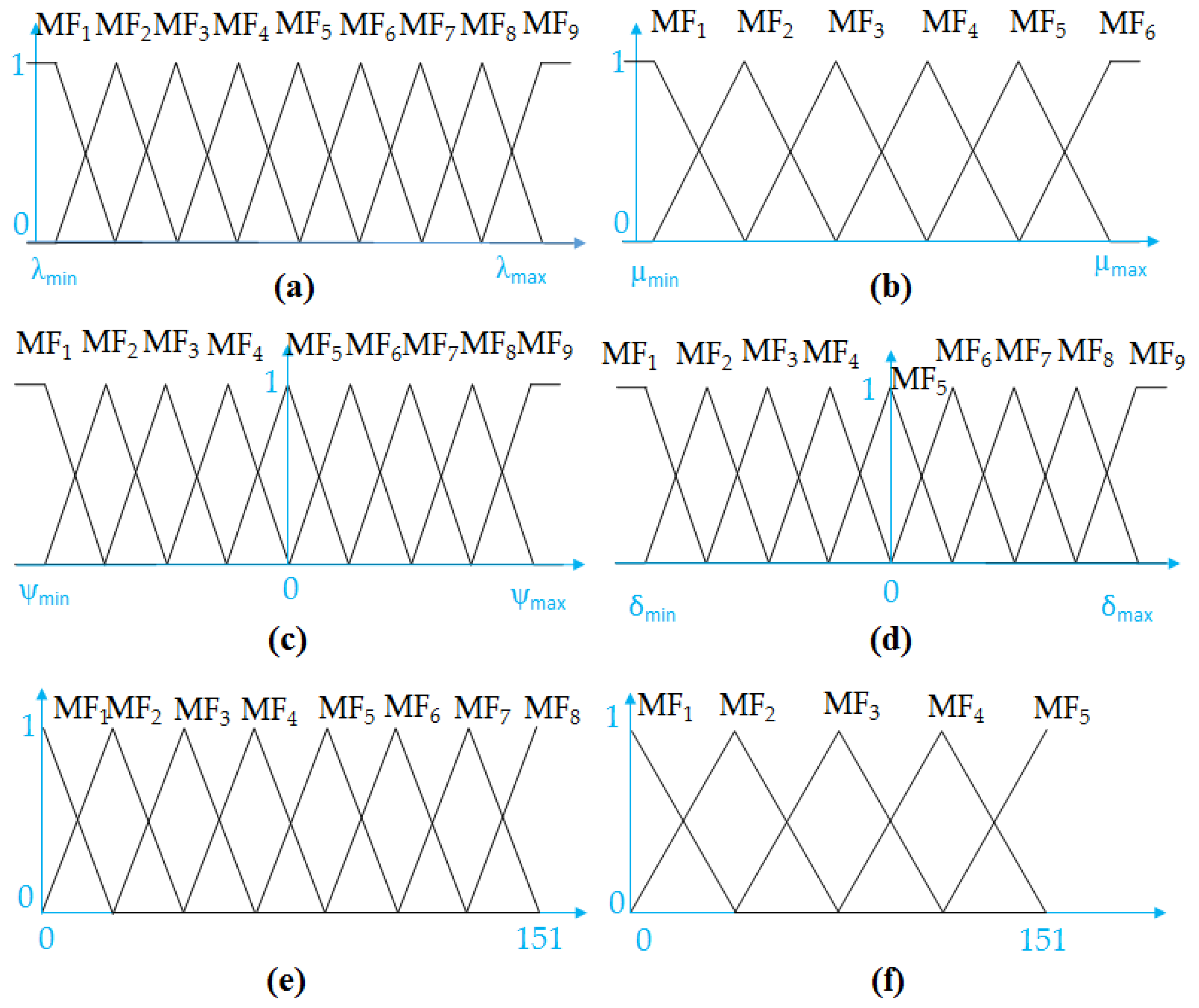
The next step is to design membership functions for all the inputs and outputs (
Figure 5). The linear (triangular) MFs were applied, which are characterized by fast reaction due to the narrow shape as compared to other MFs (exponential, quadratics).
The MFs are symmetrical to provide an equal sensitivity for the whole UOD and obtain the whole overlap of the UOD between the MFs. Each variable UOD must have a closed frontier between [
min,
max]. For the input variables, the bounds are obtained during the parameterization described in
Section 2.
The slip input MFs for the ABS are introduced in
Figure 5. There are nine MFs in total. The UOD for the front wheels lay between [0.08, 0.22]. This area is accepted according to the operational space obtained in
Figure 2 for the front wheels. The only difference between the front and the rear wheels is that the UOD of the slip input for the last ones is accepted in a range [0.07, 0.2], which is also based on the rear slip curves in
Figure 2 for the rear wheels. In short, UOD for the slip covers all stable areas for relevant roads.
The µ
x MFs are plotted in
Figure 5b. The UOD parameterization was obtained during the case study. The µ
x operational space is bounded between [10, 40].
The first input of the ESP FLC is the yaw rate. The state consists of nine MFs; UOD is limited in the range between [−4, 4] and introduced in
Figure 5c. The reason behind the range for the UOD is next: when the angular velocity exceeds 4 rad/s and the steering wheel angle change is not conducted, vehicle spin appears and the driver is no longer able to act on lateral control.
The second input of the ESP steering wheel angle MFs is shown in
Figure 5d. Like the first input, it has nine symmetrically dispelled MFs that are normalized between [−180, 180]. It is assumed that driver reaction in extreme situation must be limited to half of one full steering wheel turn to each side, left or right, which gives in total 360°.
The maximum pressure of the braking system for the studied case is 151 bar. The UOD for the output pressure variables (
Figure 5e) is therefore located between [0, 151] and consists of eight MFs. The FLC decides how many bars shall be provided to obtain an optimal slip. Finally, the pressure output for the ESP is obtained in
Figure 5f. Likewise, for the ABS the UOD lay between [0, 151]. The ESP has two outputs (
Figure 4): brake pressure for the left and the right sides. The decision of which side of the vehicle to control is determined by the rule-base operator.
The modus ponens (If–Then) form has been used in this paper for the rule-base design. The multiple input, single output (MISO) form of the linguistic rules for ABS is (taken from [
6]):
where
u1 and
u2 denote the FLC inputs wheel slip and road condition, respectively;
yq denotes the brake pressure;
Aj1 and
Ak2 relate to the
jth and
kth linguistic value associated with λ and µ
x, respectively; and
Bpq is the linguistic value of the output braking pressure.
Linguistic values for the ABS are expressed in
Table 3. There are 54 rules for the ABS control in total. The rule base for the ESP is observable in
Table 4. It has a multi input, multi output (MIMO) structure. In total, 81 rules are required to control the state. The controlled side of the vehicle depends on the yaw moment direction from the center line of the car.
For further fuzzy inference, Mamdani’s method is applied in this paper. The last step in every FLC design is the defuzzification procedure. Relying on experience and due to the good computational complexity, the ABS is defuzzified by the centroid and the ESP by the smallest-of-maxima methods.
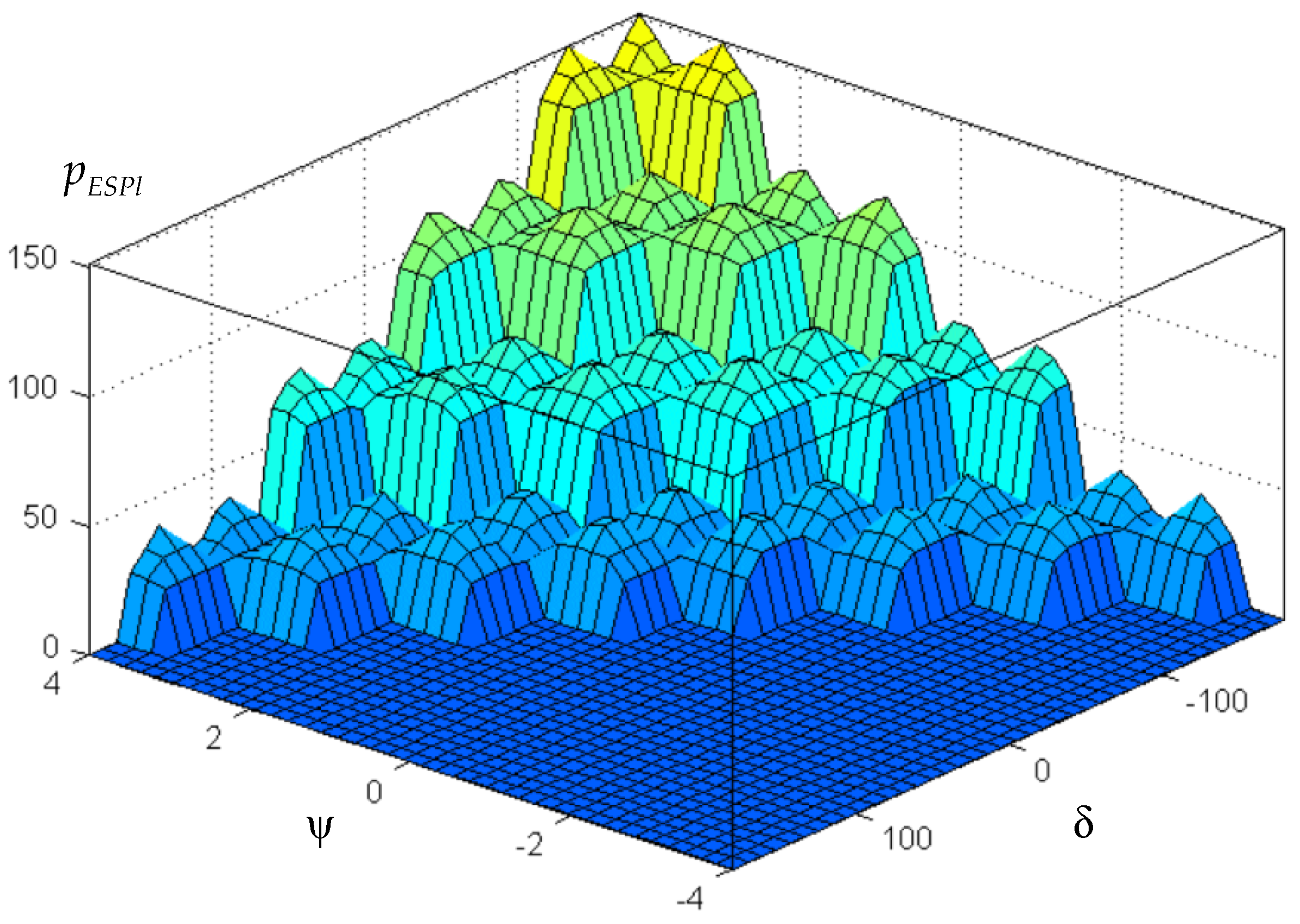
When all the design steps are finished, the rule base FLC can be expressed in a three-dimensional surface form. The ABS FLC for the front wheels is presented in
Figure 6, whereas the ESP FLC for the left side of the vehicle surface is shown in
Figure 7.
The ABS algorithm controls the slip by acting on the breaking pressure of each wheel. The ESP stabilizes the yaw rate by influencing the braking pressure with subtraction from the pressure generated for the ABS control.
Table 5 summarizes the FLC design in this work.
4. Simulation Conditions
The control algorithm is designed in Automotive Simulation Models™ (ASM) provided by the dSPACE
® GmbH Software 2014-B (64-bit, Paderborn, Germany) and interacted with the MATLAB
®/Simulink
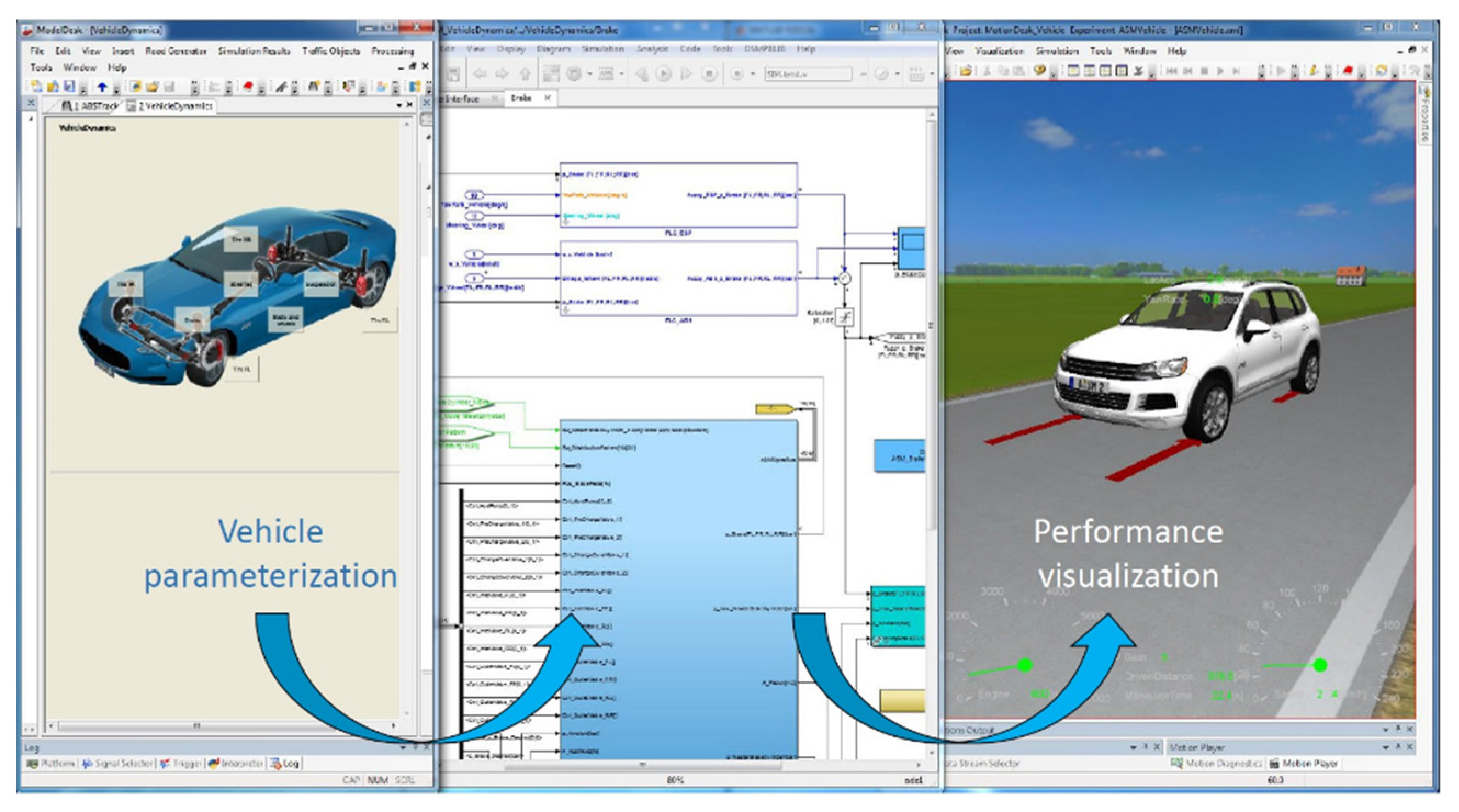
® R2013b (64 Bit, Natick, MA, USA). The ASM allows the multibody vehicle simulation procedures. The car model has 10 DOF. An overall software interface is presented in
Figure 8.
During the simulation, the braking processes were conducted on a straight road as well as in combination with cornering maneuvers. Different complex maneuvers, such as straight or cornering braking on a split-µ road surface and straight or cornering with change of the tire–road friction coefficients, were simulated. The results are introduced as a comparison of the vehicle motion with and without the activated controllers. Road variations such as dry, wet, and icy surfaces as well as their combinations were designed and simulated to prove the ABS controller robustness and its ability to hold the optimal wheel slip in different road conditions.
The reaction of the ABS controller on the wheel slip characterizes the system adaptability. The factor can be expressed in percentage and calculated by the following equation:
Furthermore, the effect of the ABS controller performance can be described with the index of performance
ABSIP. The variable is a ratio between the vehicle deceleration with and without the controller and is found as follows:
First, the simulation is dedicated to split-µ roads. When half of the road has a significantly higher friction coefficient as compared to the other half, a high yaw moment occurs. The driver is not able to compensate properly for the yaw dynamics, and the vehicle can spin around the COG. The corresponding simulation in this study is performed for cornering and straight braking maneuvers.
For the straight road, half wet–half dry and half icy–half wet surfaces were chosen. For the curved road, half dry–half icy and half wet–half dry surface profiles were designed.
Next, the model was simulated on a curved road line for different tire–road friction characteristics. The road friction conditions vary during the braking process from icy and dry to wet. Afterwards, the same road conditions were applied to the straight road profile. In this experimentation part the controller robustness is studied.
5. Results
5.1. Study on Controller Functionality
The first part of the simulation experiments is addressed to the vehicle safety investigation on the split-µ surface profiles. The maneuvers are simulated on straight and curved roads. For the straight braking, the vehicle was accelerated to 100 km/h and after that the emergency braking was conducted. For curved road braking the vehicle was accelerated to 65 km/h while the transport is cornering left.
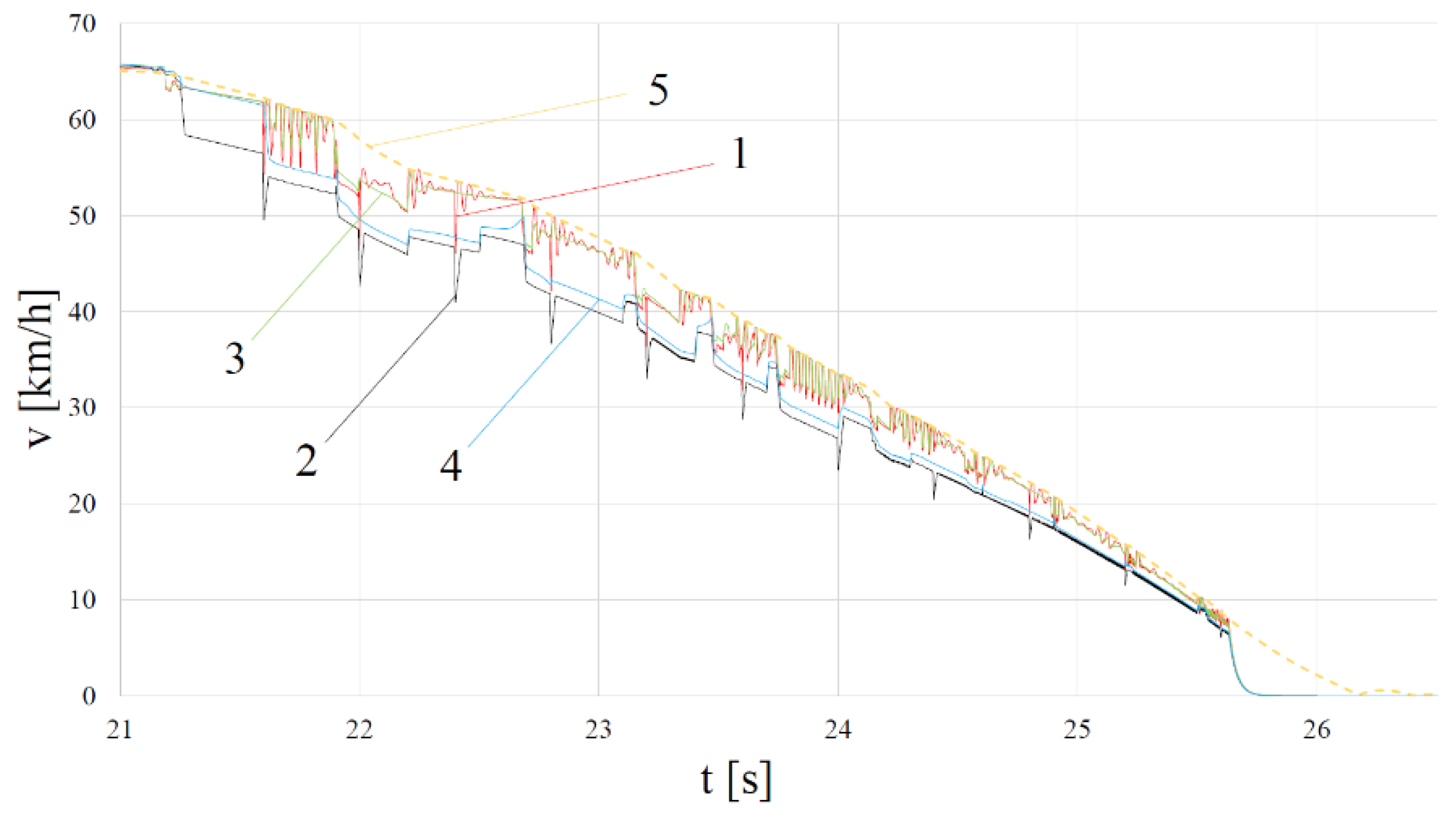
Braking on a curved road with a split-µ surface is the most extreme situation for vehicle safety, because the yaw rate is created by the driver while cornering. The left side of the road is dry and the right side is icy in the present instance. The vehicle body and the wheel speed curves are shown in
Figure 9.
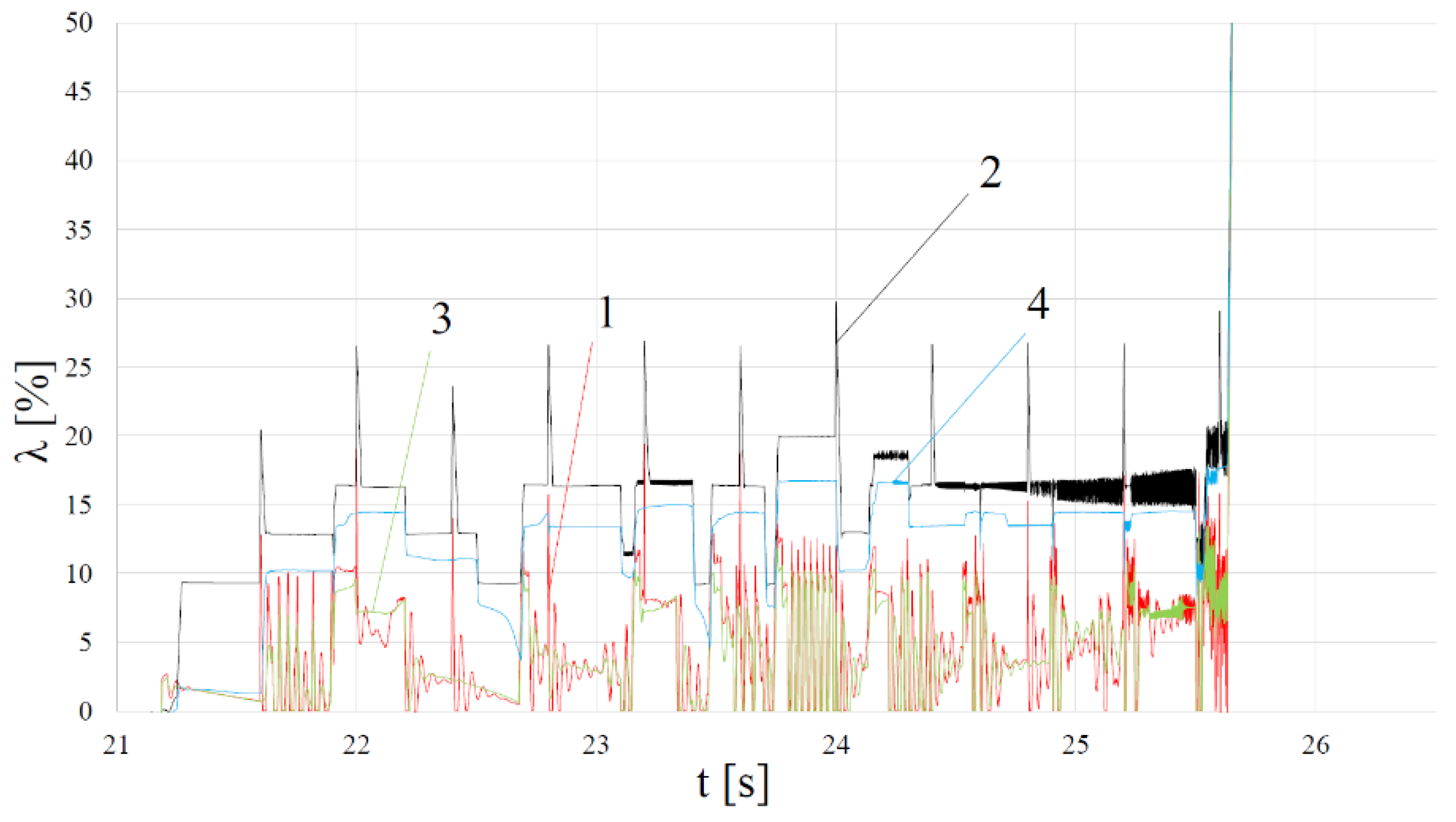
Before the ABS is activated, the ESP is already reducing the braking pressure from the left side of the vehicle (the dry surface). The slip values of the left side wheels are therefore lower compared to the right side (
Figure 10). Although the left side of the road is dry, the left wheels have less than 10% of the wheel slip values, because the ESP reduces the braking pressure from the left half of the vehicle. The driver, thus, is able to control the car path to follow the road.
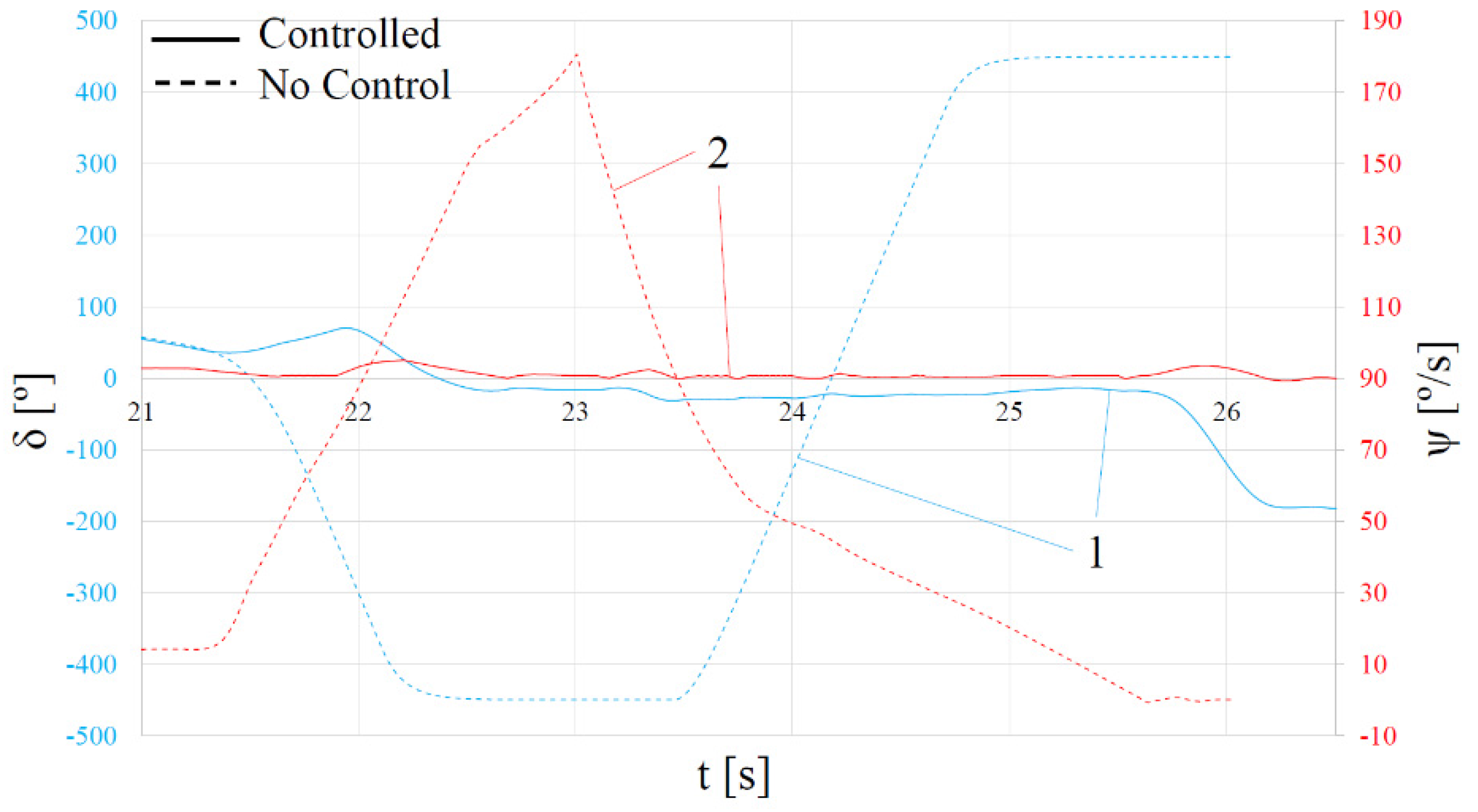
The dry surface has a higher friction coefficient than the icy road. In this case, the yaw rate is extremely high due to the left cornering. The yaw rate grows after the start of the braking process (
Figure 11). However, the ESP reacts very fast and the braking pressure is minimized rapidly. Therefore, the yaw rate remains almost zero during the whole braking distance on the cornering maneuvers. Hence, the driver is able to maintain lateral stability during emergency braking.
When the controller is switched off (
Figure 11, dashed lines), the vehicle spins left. The driver turns the steering wheel to the right until the maximum allowed angle. Nevertheless, the high yaw rate in the opposite direction makes the car spin.
The simulation results with other split-µ road maneuvers are introduced in
Table 6, the plots are represented in
Figures S1–S9. The ESP safety assistance performance is also compared to the same condition simulations with the turned-off controller. The maximum yaw rate ψ
max does not exceed 26°/s. When the controller is turned off the yaw rate is very high, which makes the car spin around its COG even if the driver tries to keep the vehicle following the road. The braking distance
s and the average body deceleration
−aaverage for no control simulation are not introduced in the table, because in every case, when the controller is turned off, the car spins.
In short, the comparison simulation, where the controller was turned on and turned off, shows the importance of the proposed solution in terms of vehicle safety. Different complex maneuvers were studied. The driver is able to remain on the road, following the path. When the controller is turned off, steering is impossible and, the vehicle starts to spin around the COG, causing unfortunate car accidents.
5.2. Study on Controller Robustness
The next simulation study is devoted to an investigation of the controller robustness on curved and straight road profiles. The road surfaces are even. However, they are different for the whole braking distance. Again, in cornering maneuvers the vehicle is accelerated to 65 km/h in a straight line—to 100 km/h. Afterwards, emergency braking is performed.
The vehicle body and the vehicle wheels velocity plots for the varying road conditions on a straight road maneuvers are introduced in
Figure 12. The vehicle starts braking on a dry road with transition to a wet surface. The car finishes braking on icy asphalt. The vehicle changes the deceleration according to the tire–road adhesive characteristics. The algorithm is able to recognize the road surface and, according to the obtained information supply, appropriate pressure to maintain efficient braking is applied.
The slip curves for the each wheel are shown in
Figure 13. No wheel lock has been obtained. The controller holds the optimal slip for each wheel on every road surface. The wheel pressure distribution aims to obtain an optimal wheel slip.
Other braking results for the maneuvers with even road profiles studied in this paper are introduced in
Figures S10–S17. To conclude the wheel slip control robustness and compare it to the theoretical energy efficient values from
Figure 2,
Table 7 is introduced. The simulation wheel slip results are taken as the average numbers. It can be concluded that the controller is able to maintain the optimal slip to maintain energy-efficient braking.
In cornering maneuvers, as the vehicle is turning left, the wheel slip values for the left side of the vehicle are smaller compared to the right side. The difference is caused by the ESP assistance. In addition, even when the road surface is even, the yaw rate appears when the vehicle starts to brake. However, the driver reacts by controlling the steering wheel and the car remains on the road. Therefore, the robustness of the proposed controller is investigated through several examples of different complex maneuvers.
The braking and ESP performance results on the same roads without controllers are also introduced in
Table 7. It is clear that the braking distances without the controllers are longer for every considered case. Due to the wheels’ blockage, the average deceleration results (
−aaverage) are lower.
When the controllers are turned off, the driver rotates the steering wheel as far as possible to remain on the road while conducting the cornering maneuvers. The car, however, drives off the road without controller assistance. When the controllers are turned on, contrariwise, it is enough for the driver to slightly control the vehicle steering wheel to remain on the road.
All in all, the ABS FLC is able to recognize the tire–road adhesive coefficient and supply the appropriate braking pressure to maintain energy-efficient deceleration. The simulation results of the controller on the straight and cornering profiles prove the controller’s robustness.
6. Discussion and Conclusions
This paper describes the FLC algorithm for vehicle safety assistance control. The ABS and the ESP integration introduced in this work provides energy-efficient and robust responses to different road surfaces and curved braking performance. In order to design a robust FLC, the tire–road adhesive coefficients versus tire slip curves for dry, damp, wet, and icy roads were plotted first (
Figure 2). The studied vehicle model was parameterized according to the SUV parameters. The proposed solution is suitable for the studied SUV model.
A combination of ABS and ESP controllers both based on FLC theory is introduced. Each wheel has an independent controller. The simulation results conducted on different complex maneuvers involving curved road profiles and split-µ road surfaces as well as varying road friction coefficients prove the controller robustness. The algorithm assists the driver with steering. Thus, a driver with average reaction times is able to follow the road during emergency heavy braking.
The simulation results introduced in
Section 5 prove the FLC robustness to varying road surfaces and split-µ profiles. Moreover, optimal slip braking on even road profiles is maintained, providing energy-efficient braking. Comparing the research results to other intelligent computation control algorithms introduced in
Section 1, the current study offers several novel proposals for the vehicle dynamics and safety control fields.
First, the proposed controller does not require a reference error and change of error input variables as in [
10,
11,
12,
15] Instead, the controller covers the whole braking process stable area. The human experience containing rule-base block provides a suitable pressure to hold an optimal for every studied road surface slip value. Therefore, the dependence on the constant reference value, which is unpredictable in reality, is avoided.
Second, in most of the previously proposed cases, as for instance in [
10,
11,
12,
16], braking on a straight even surface excludes the lateral dynamics influence on the controller, and, thus, on the vehicle safety performance. The simulation results in
Section 5 show that the lateral dynamics during cornering maneuvers and on split-µ road profiles braking must be taken into consideration as they are essential in car spin and roll-over avoidance. Otherwise, the ABS and ESP safety assistance cannot be ensured.
Third, the simple quarter-car model studied in [
9,
18] is not enough to prove the controller productivity and robustness. In reality, the four-wheel vehicle model represents a more complex control task. Consequently, the vehicle model examined in this paper has an advantage over other similar works.
Finally, regarding the ESP performance, most researchers [
20,
21,
23,
24,
25] limit their results with a simple line change maneuver. There were no publications found testing the ABS and ESP designed with FLC on a cornering split-µ road profile, as has been done in the current work.
In short, the results obtained from the current research are as follows:
The ESP and ABS FLC control integration to obtain energy-efficient braking performance.
The controls safety and robustness in different kinds of complex maneuvers is studied.
Use of a complex 10 DOF vehicle model in the controller simulation.
The main drawback of the presented work, however, is its restriction by the numerical simulation. In the PC software simulation, the real vehicle dynamics and physical behavior are missing. A computer simulation does not completely solve the problem.
Future research covers the experimentation on the HIL brakes test bench. Moreover, the controller will be designed and applied on a four in-wheel-motor drive passenger electric vehicle providing the torque-base brake solution to study recuperative braking.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}