
Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines


Abstract
:
1. Introduction
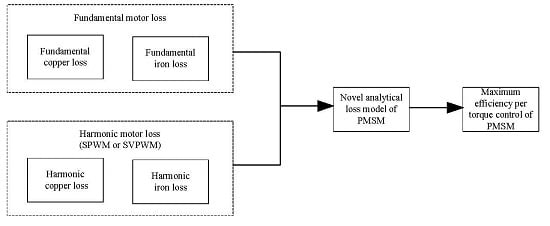
2. Fundamental Loss Model of PMSMs
2.1. Fundamental Copper Loss
2.2. Fundamental Iron Loss
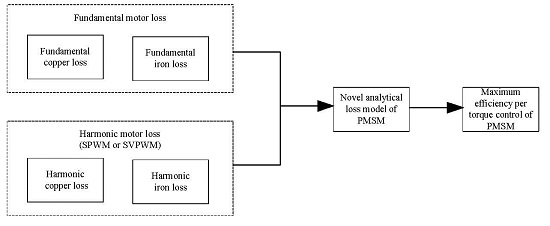
2.3. Fundamental Loss Model
3. Harmonic Loss Model of the PMSM
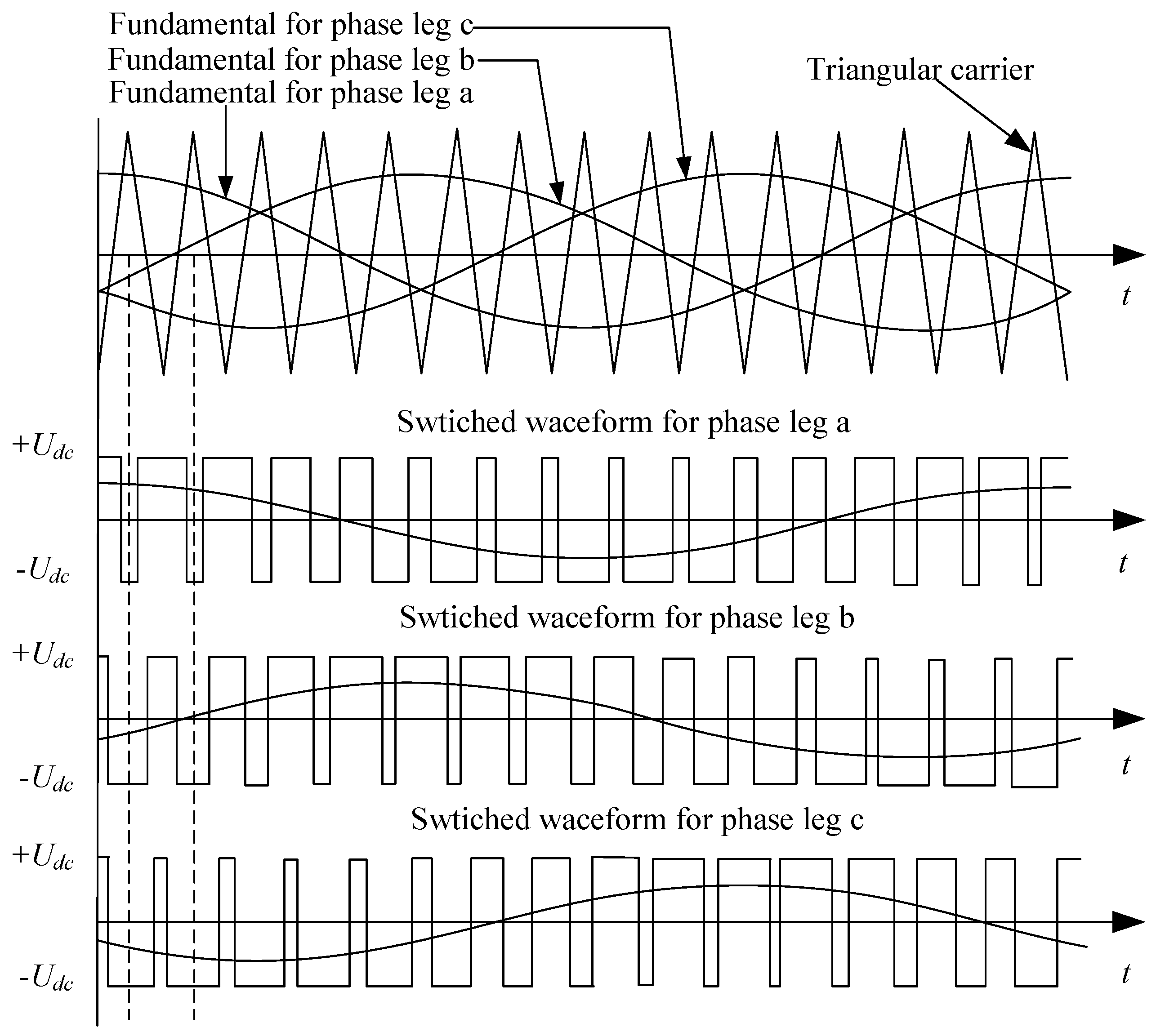
3.1. Harmonic Components of SPWM
- Carrier harmonics, which are the same components for all three-phase output voltages.
- Side-band harmonics with even combinations of m ± n, which are eliminated by the terms in Equation (24).
- Side-band harmonics where n is a multiple of 3.
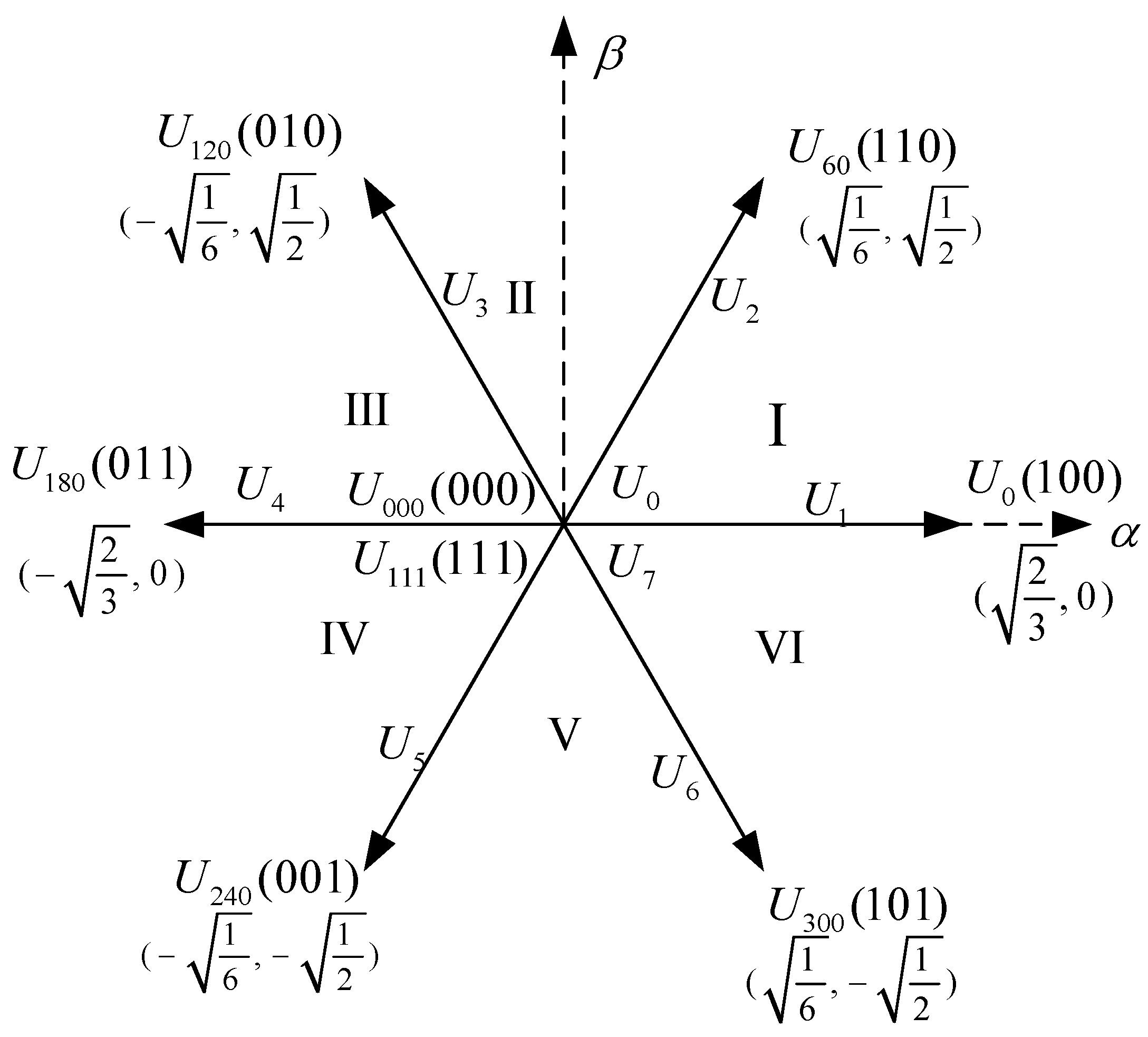
3.2. Harmonic Components of SVPWM
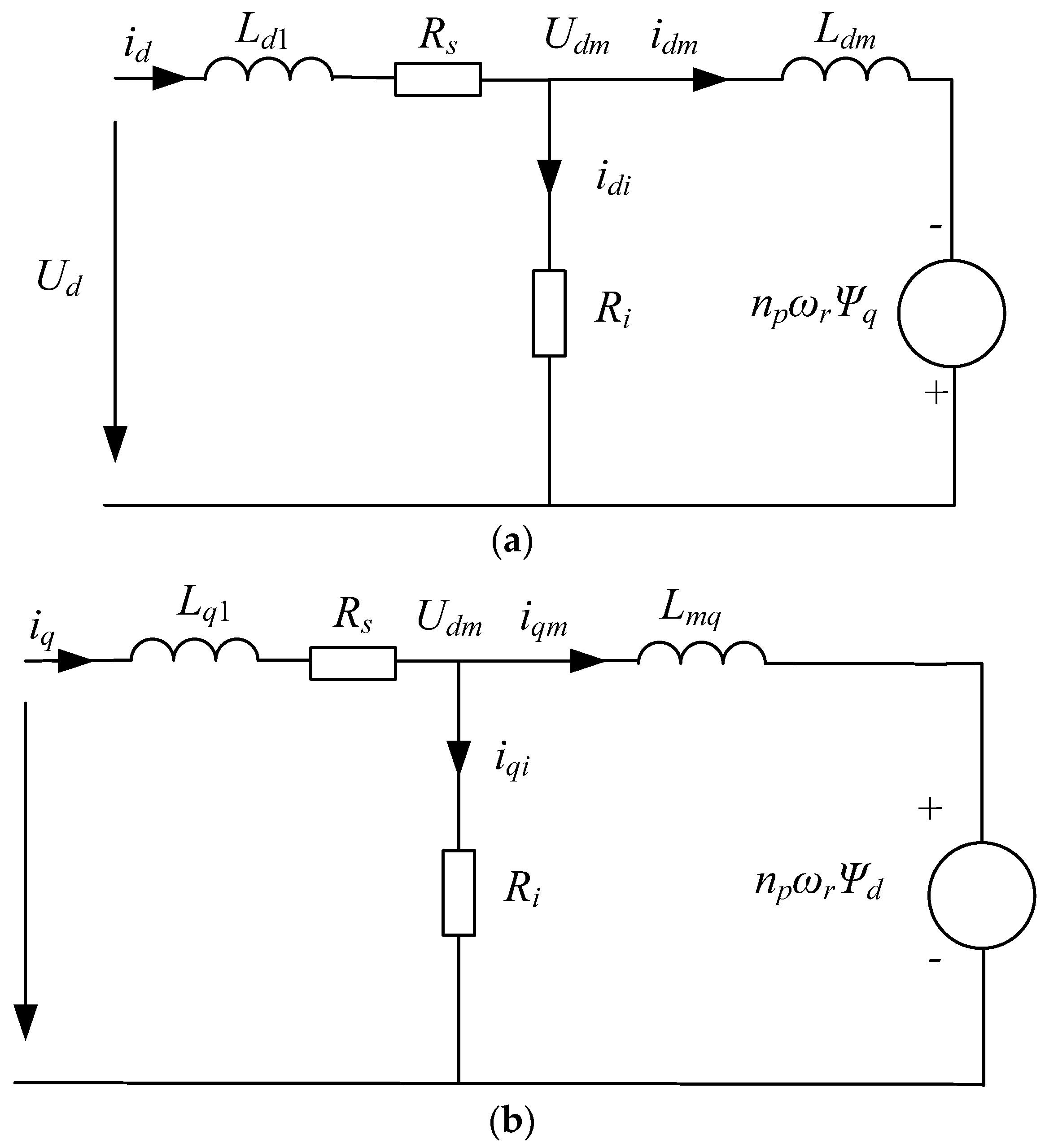
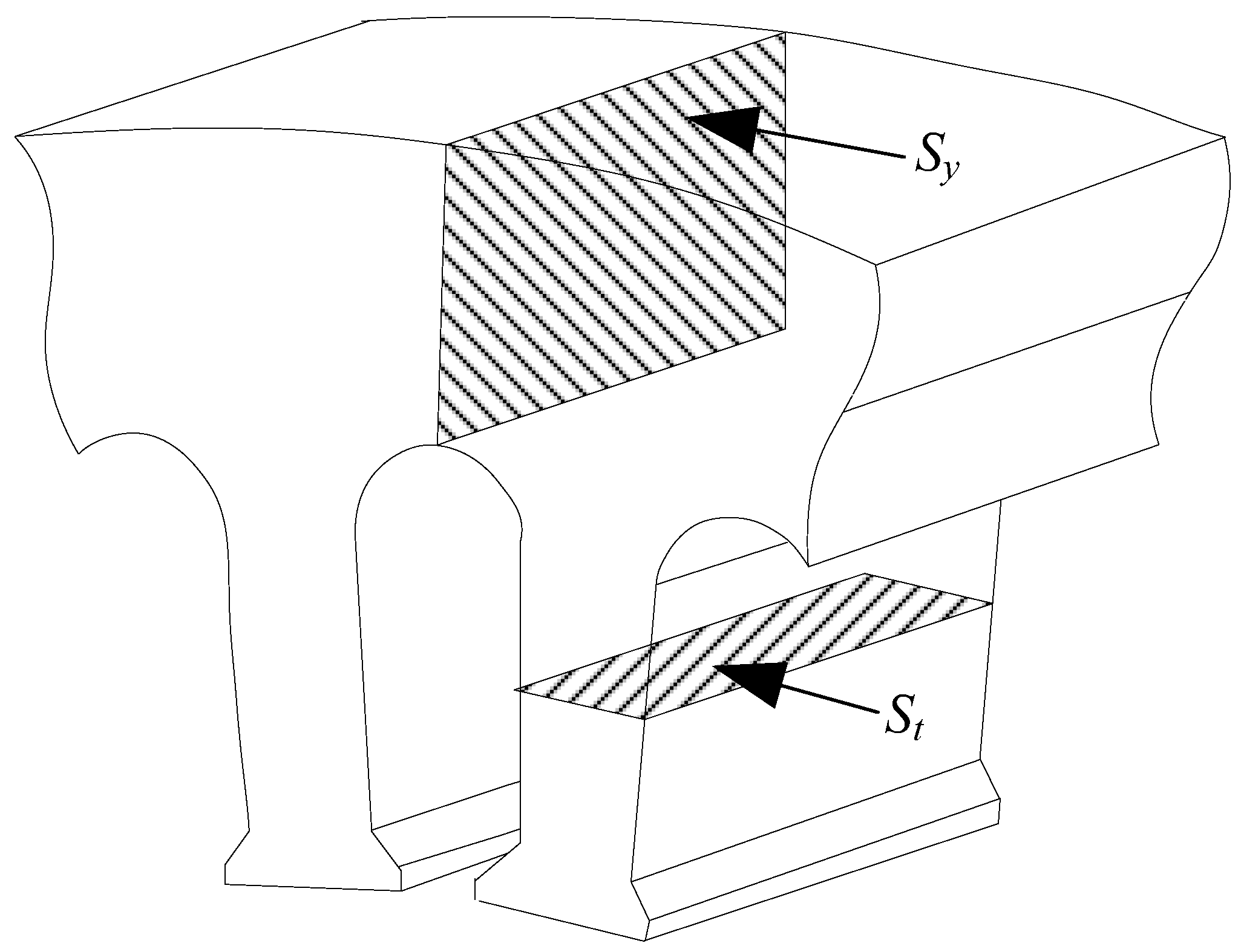
3.3. Harmonic Iron Loss of PMSM
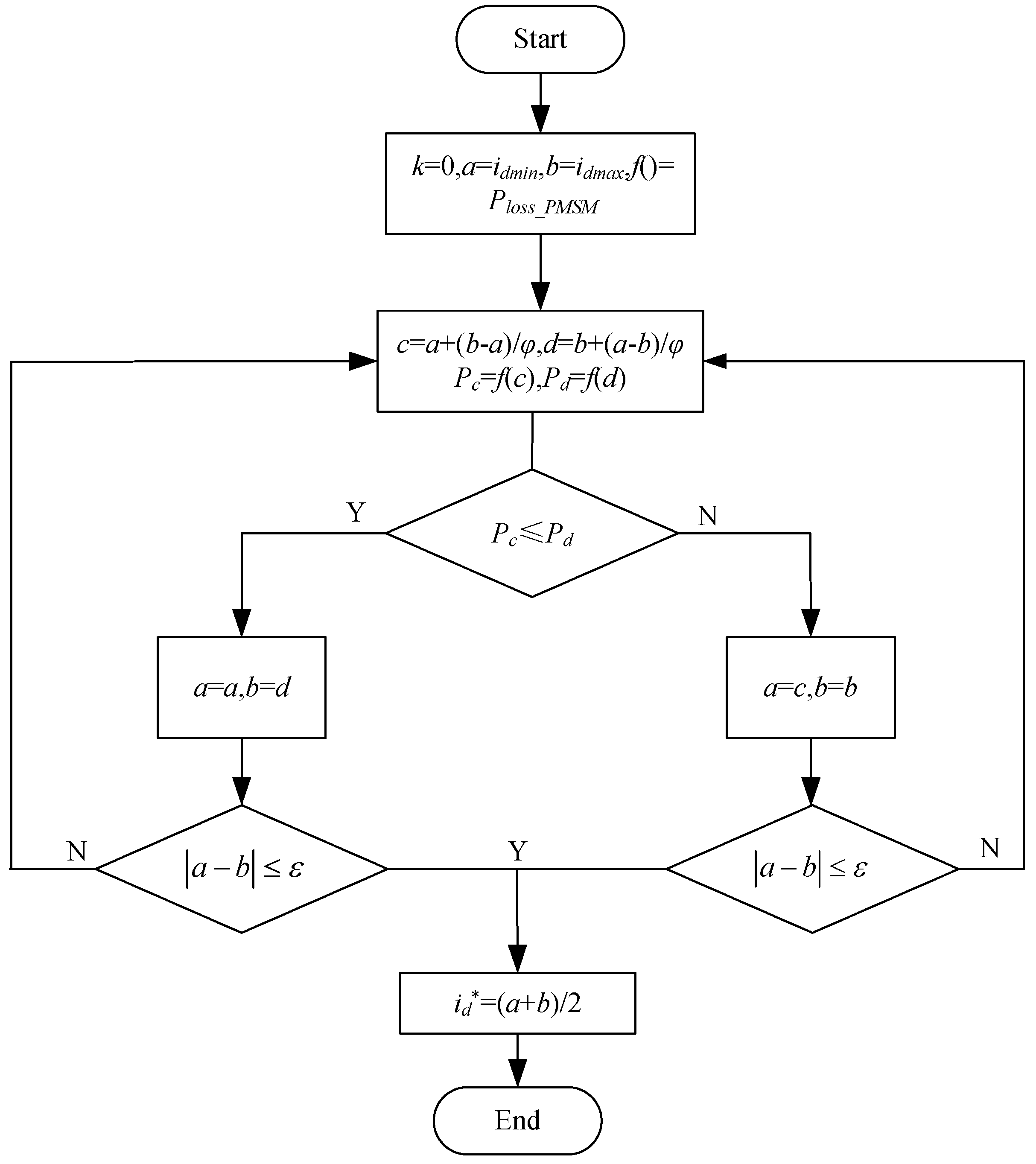
4. Maximum Efficiency per Torque Control of PMSM
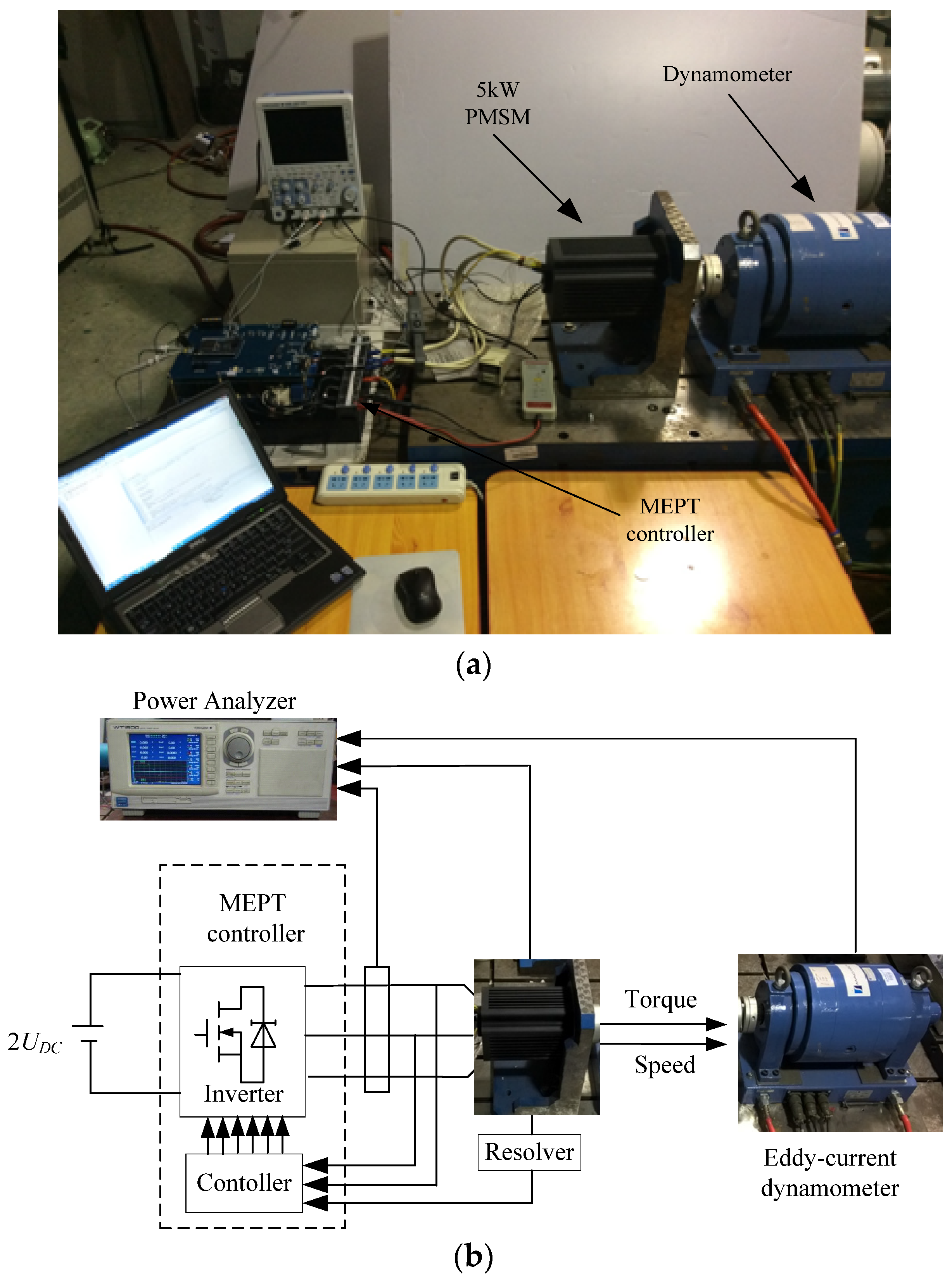
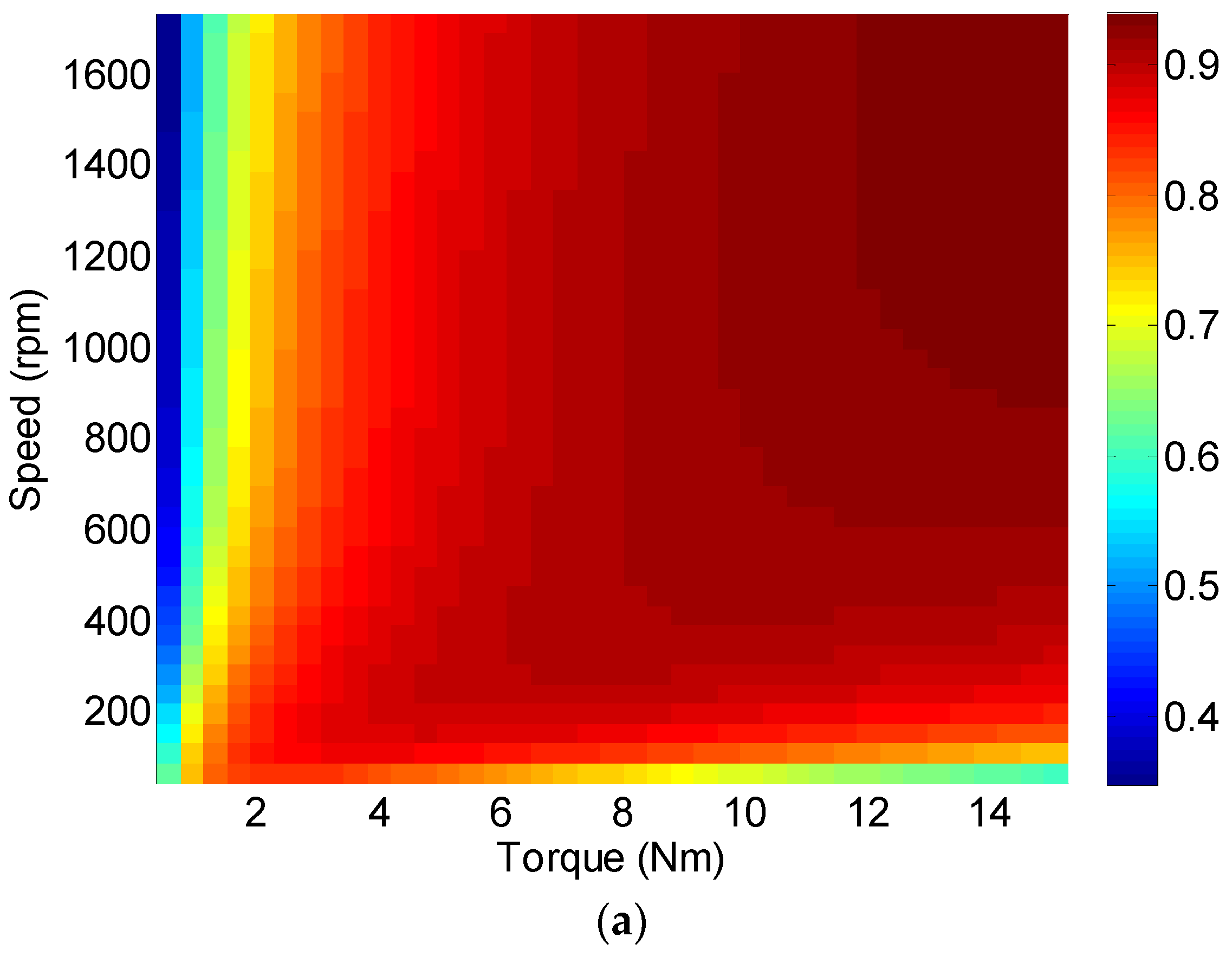
5. Experimental Results and Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Yuan, W.; Shao, P.W.; Shu, M.C. Choice of Pole Spacer Materials for a High-Speed PMSM Based on the Temperature Rise and Thermal Stress. IEEE Trans. Appl. Superconduct. 2016, 26, 1109–1114. [Google Scholar]
- Thomas, F.; Kay, H. Design and optimization of an IPMSM with fixed outer dimensions for application in HEVs. In Proceedings of the IEEE International Electric Machines and Drives Conference, Miami, FL, USA, 3–6 May 2009; pp. 887–892.
- Li, F.; Guo, L.L.; Zhe, Q.; Wen, X.Y. Analysis of eddy current loss on permanent magnets in PMSM with fractional slot. In Proceedings of the Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 1246–1250.
- Morimoto, S.; Tong, Y.; Takeda, Y.; Hirasa, T. Loss minimization control of permanent magnet synchronous motor drives. IEEE Trans. Ind. Electron. 1994, 41, 511–517. [Google Scholar] [CrossRef]
- Estima, J.O.; Marques Cardoso, A.J. Efficiency Analysis of Drive Train Topologies Applied to Electric/Hybrid Vehicles. IEEE Trans. Veh. Technol. 2012, 61, 1021–1031. [Google Scholar] [CrossRef]
- Pan, C.T.; Sue, S.M. A linear maximum torque per ampere control for IPMSM drives over full-speed range. IEEE Trans. Energy Convers. 2005, 20, 359–366. [Google Scholar] [CrossRef]
- Stumberger, B.; Stumberger, G.; Dolinar, D. Evaluation of saturation and cross-magnetization effects in interior permanent-magnet synchronous motor. IEEE Trans. Ind. Appl. 2003, 39, 1264–1271. [Google Scholar] [CrossRef]
- Jung, S.Y.; Hong, J.; Nam, K. Current minimizing torque control of the IPMSM using Ferrari’s method. IEEE Trans. Power Electron. 2013, 28, 5603–5617. [Google Scholar] [CrossRef]
- Jeong, I.; Gu, B.G.; Kim, J.; Nam, K.; Kim, Y. Inductance estimation of electrically excited synchronous motor via polynomial approximations by Least Square Method. IEEE Trans. Ind. Appl. 2015, 51, 1526–1537. [Google Scholar] [CrossRef]
- Consoli, A.; Scarcella, G.; Scelba, G.; Testa, A. Steady-state and transient operation of IPMSMs under maximum-torque-per-ampere control. IEEE Trans. Ind. Appl. 2010, 46, 121–129. [Google Scholar] [CrossRef]
- Reza, F.; Mahdi, J.K. High Performance Speed Control of Interior-Permanent-Magnet-Synchronous Motors with Maximum Power Factor Operations. IEEE Trans. Ind. Appl. 2003, 3, 1125–1128. [Google Scholar]
- Uddin, M.N.; Radwan, T.S.; Rahman, M.A. Performance of Interior Permanent Magnet Motor Drive over wide speed range. IEEE Trans. Energy Convers. 2002, 17, 79–84. [Google Scholar] [CrossRef]
- Cavallaro, C.; Tommaso, A.O.; Miceli, R.; Raciti, A.; Galluzzo, G.R.; Trapanese, M. Efficiency Enhancement of Permanent-Magnet Synchronous Motor Drives by Online Loss Minimization Approaches. IEEE Trans. Ind. Electron. 2005, 52, 1153–1160. [Google Scholar] [CrossRef] [Green Version]
- Uddin, M.N.; Rebeiro, R.S. Online efficiency optimization of a fuzzy-logic-controller-based IPMSM drive. IEEE Trans. Ind. Appl. 2011, 47, 1043–1050. [Google Scholar] [CrossRef]
- Urasaki, N.; Senjyu, T.; Uezato, K. A novel calculation method for iron loss resistance suitable in modeling permanent-magnet synchronous motors. IEEE Trans. Energy Convers. 2003, 18, 41–47. [Google Scholar] [CrossRef]
- Urasaki, N.; Senjyu, T.; Uezato, K. An accurate modeling for permanent magnet synchronous motor drives. In Proceedings of the 15th Annual IEEE Applied Power Electronics Conference and Exposition, New Orleans, LA, USA, 6–10 February 2000; pp. 387–392.
- Bolognani, S.; Peretti, L.; Zigliotto, M.; Bertotto, E. Commissioning of electromechanical conversion models for high dynamic PMSM drives. IEEE Trans. Ind. Electron. 2010, 57, 986–993. [Google Scholar] [CrossRef]
- Ni, R.G.; Xu, D.G.; Wang, G.L.; Ding, L.; Zhang, G.Q.; Qu, L.Z. Maximum Efficiency Per Ampere Control of Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Electron. 2015, 62, 2135–2143. [Google Scholar] [CrossRef]
- Yamazaki, K.; Seto, Y. Iron loss analysis of interior permanent-magnet synchronous motors-variation of main loss factors due to driving condition. IEEE Trans. Ind. Appl. 2006, 42, 1045–1052. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Space Vector | Space Vector Active Time | |
|---|---|---|
| U1 | ||
| U2 | ||
| U2 | ||
| U3 | ||
| U3 | ||
| U4 | ||
| U4 | ||
| U5 | ||
| U5 | ||
| U6 | ||
| U6 | ||
| U1 |
| A Phase Leg | B Phase Leg | C Phase Leg | |
|---|---|---|---|
| i | y1(i) | y2(i) | x1(i) | x2(i) |
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | 0 | |||
| 4 | 0 | |||
| 5 | ||||
| 6 |
| Parameter | Value |
|---|---|
| rated power | 4 kW |
| rated speed | 2000 rpm |
| max power | 5 kW |
| poles | 10 |
| phase resistance | 0.12 Ω |
| phase inductance | 1.67 mH |
| DC bus voltage | 270 V |
| stator outer diameter | 150 mm |
| Stator inner diameter | 100 mm |
| axial length | 68 mm |
| PWM frequency | 5 kHz |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Zhang, C.; Li, L.; Zhang, J.; Wang, M. Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines. Appl. Sci. 2016, 6, 425. https://doi.org/10.3390/app6120425
Guo Q, Zhang C, Li L, Zhang J, Wang M. Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines. Applied Sciences. 2016; 6(12):425. https://doi.org/10.3390/app6120425
Chicago/Turabian StyleGuo, Qingbo, Chengming Zhang, Liyi Li, Jiangpeng Zhang, and Mingyi Wang. 2016. "Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines" Applied Sciences 6, no. 12: 425. https://doi.org/10.3390/app6120425
APA StyleGuo, Q., Zhang, C., Li, L., Zhang, J., & Wang, M. (2016). Maximum Efficiency per Torque Control of Permanent-Magnet Synchronous Machines. Applied Sciences, 6(12), 425. https://doi.org/10.3390/app6120425