
T-Spline Based Unifying Registration Procedure for Free-Form Surface Workpieces in Intelligent CMM


Abstract
:1. Introduction
2. System Architecture
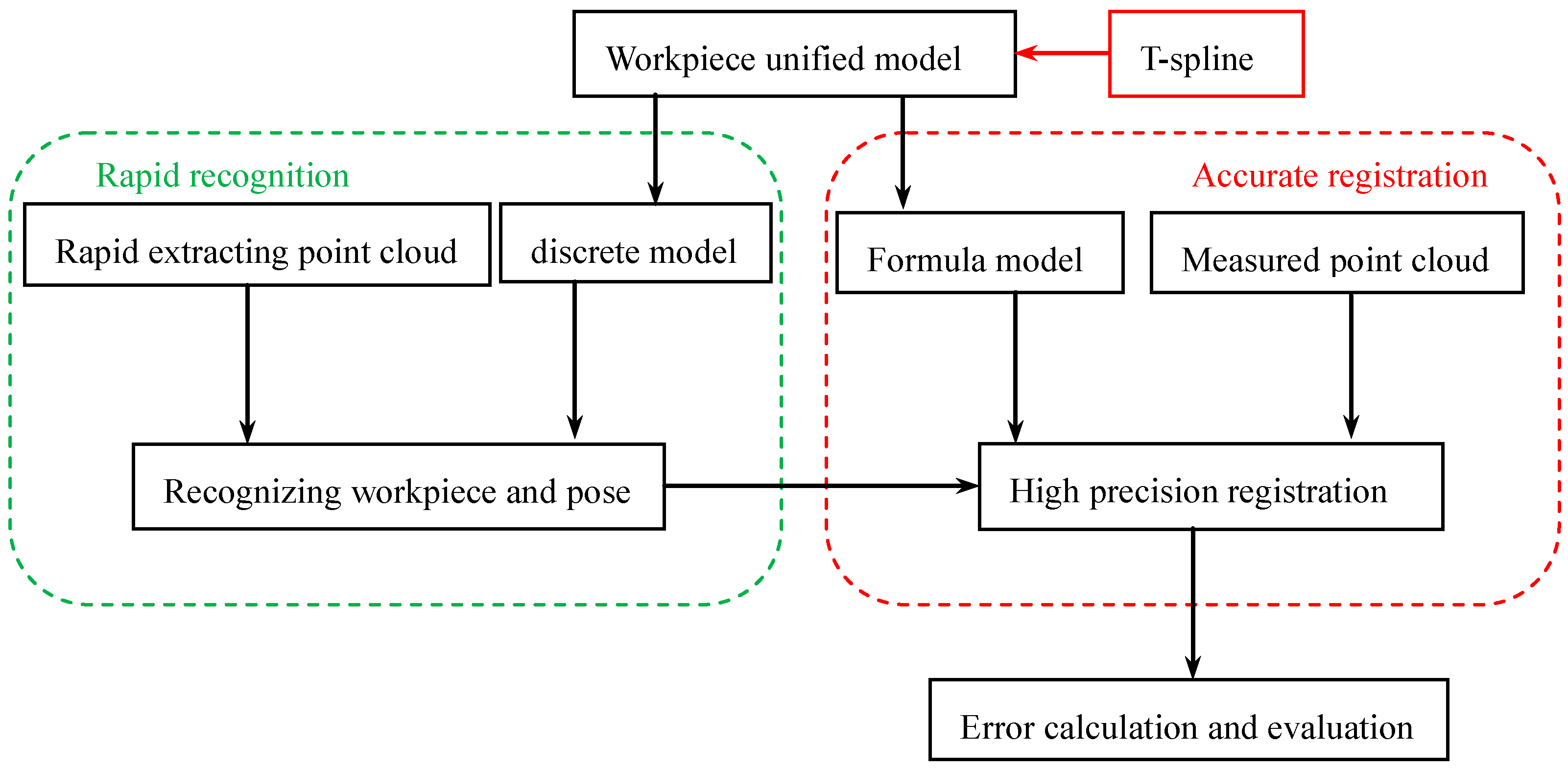
2.1. Overall System Procedure
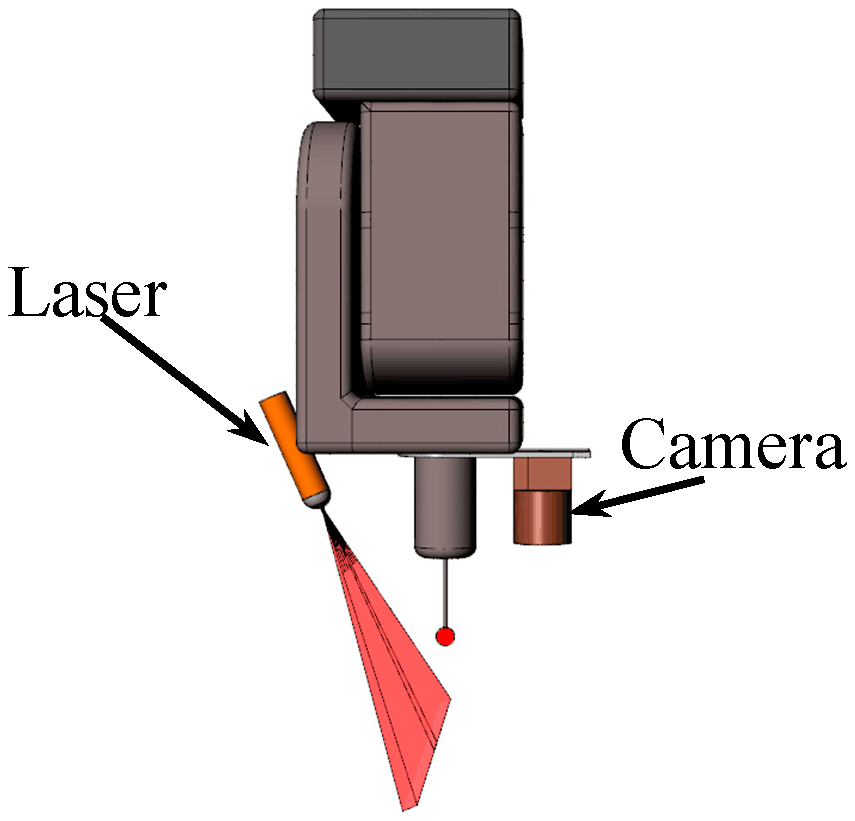
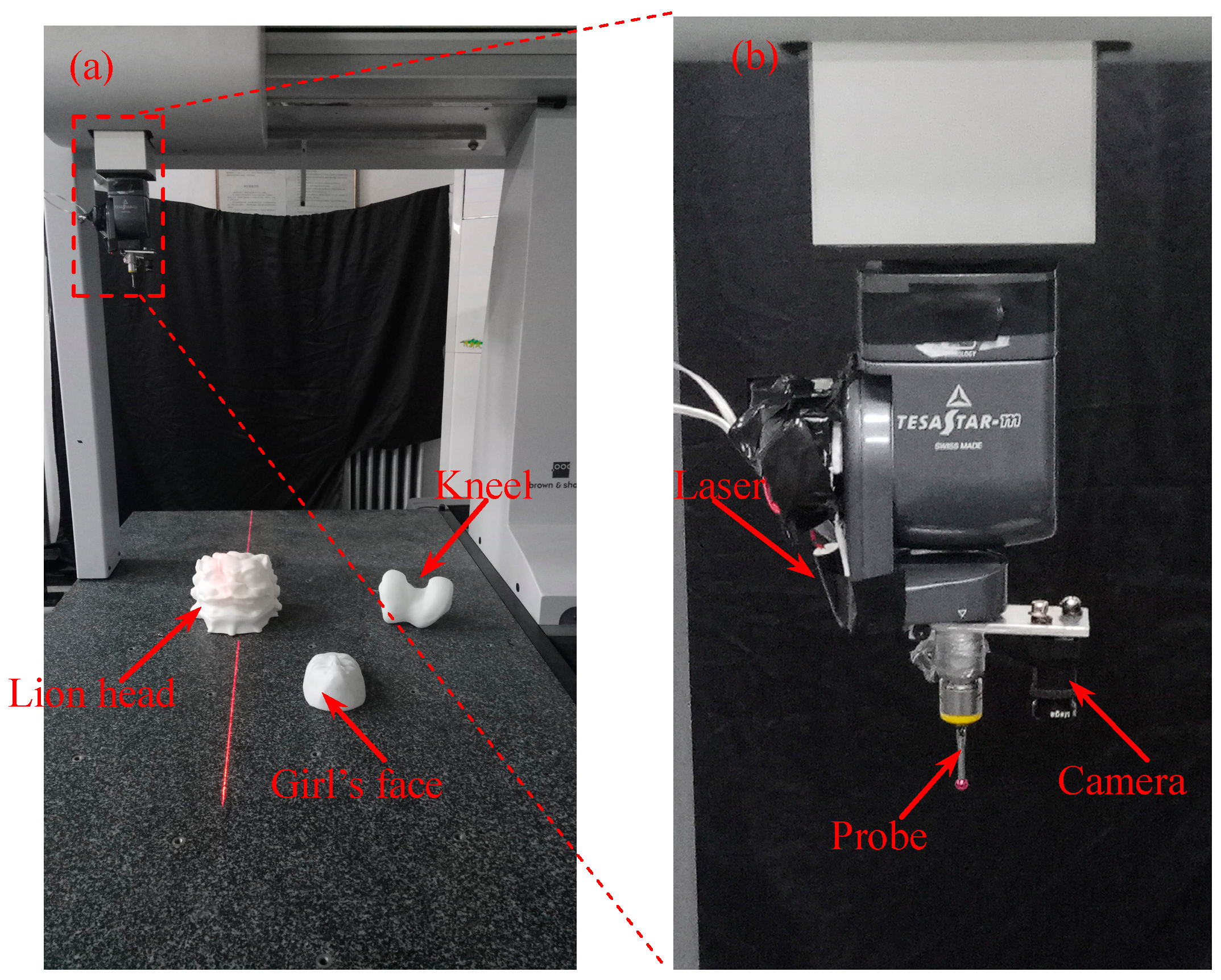
2.2. The New Visual System
3. Technology of the System
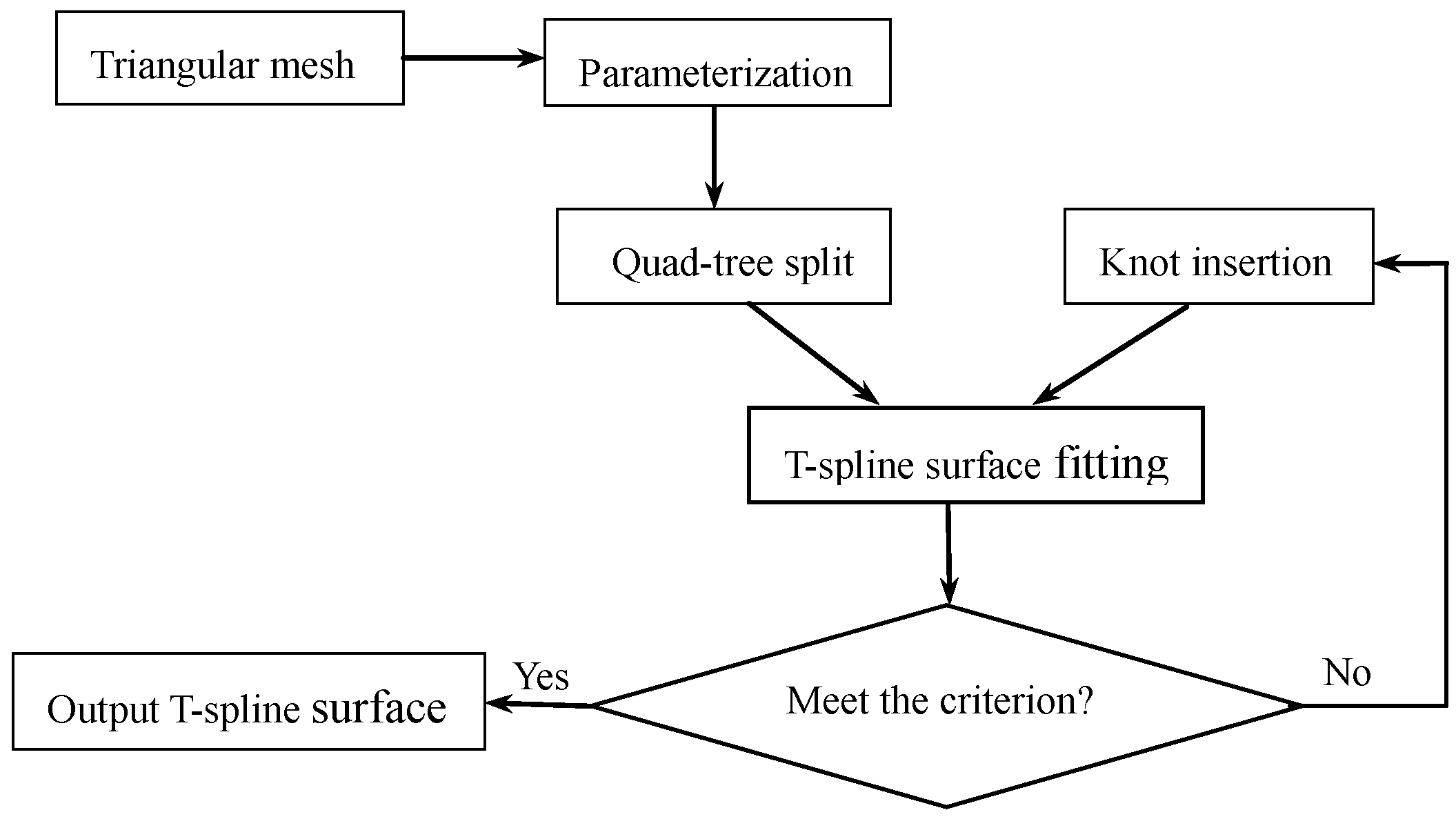
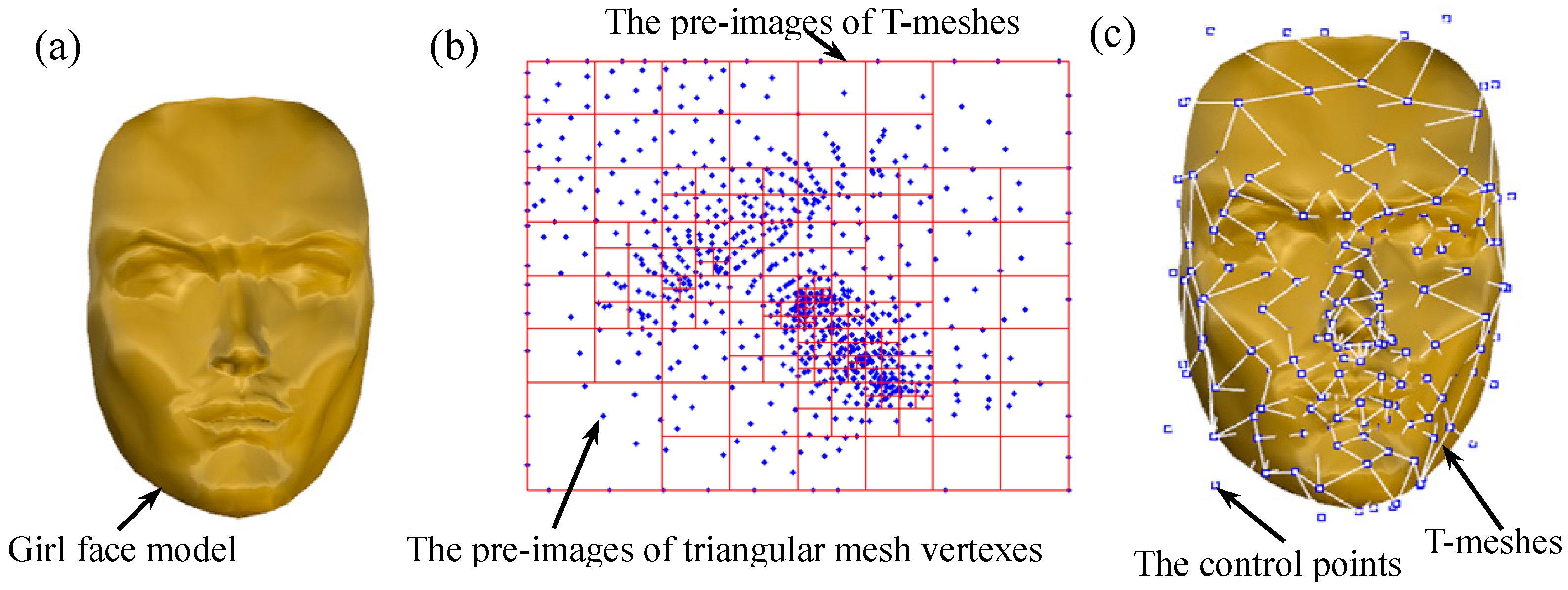
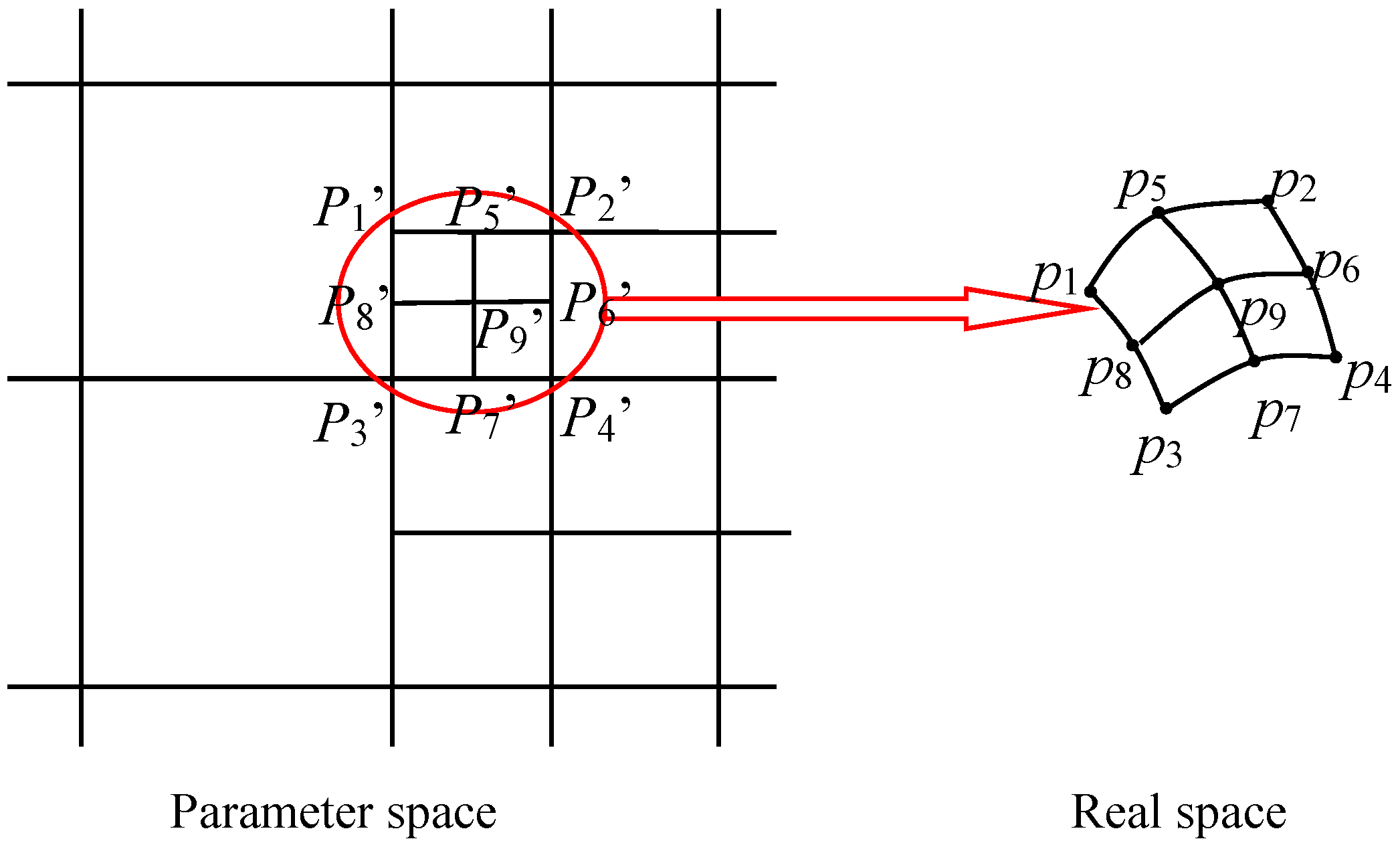
3.1. Establishment of a Unified Model
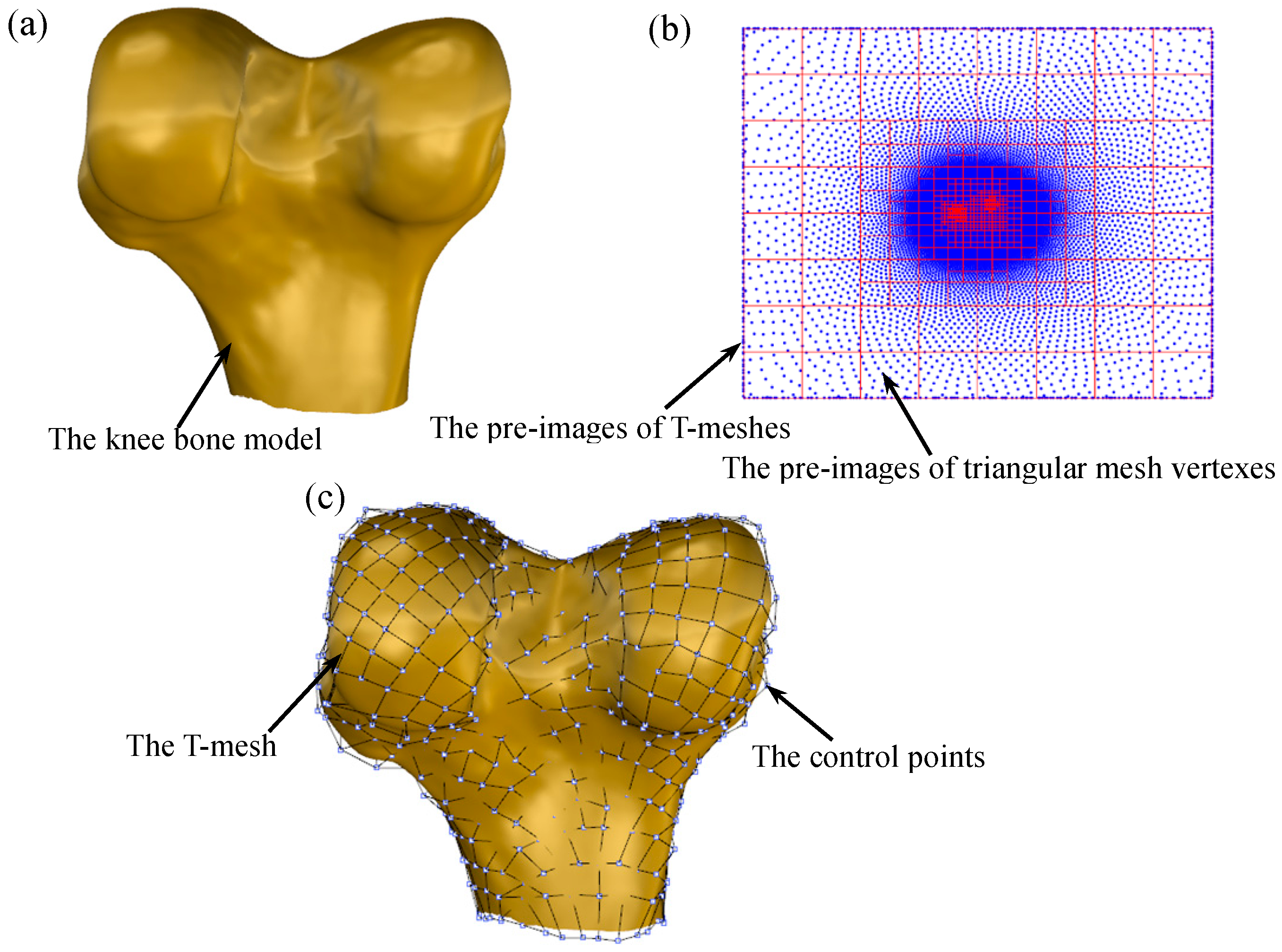
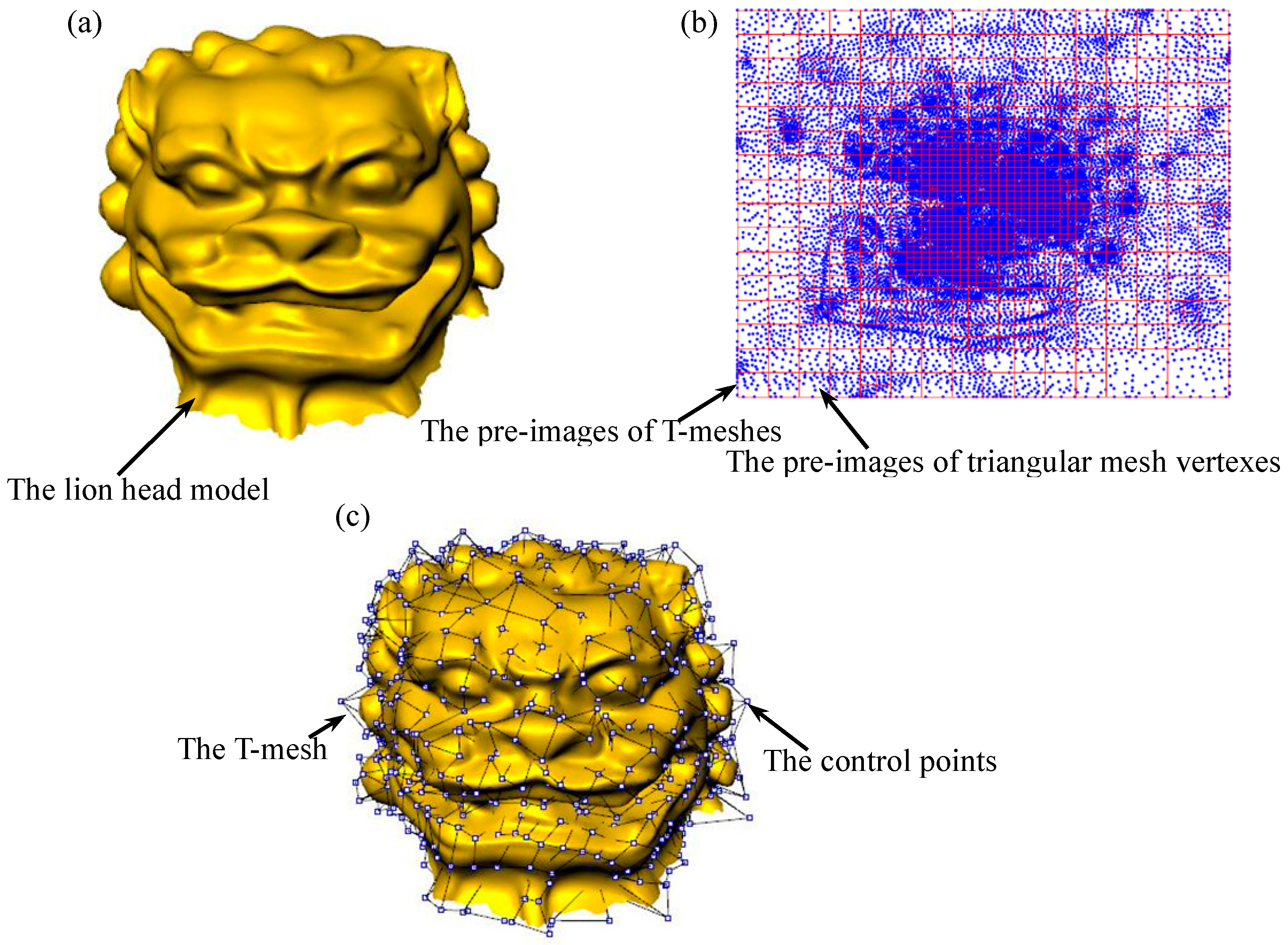
3.2. Discretization of the Model
3.3. Overall Registration and Error Evaluation
- (1)
- RT solved through the point cloud registration is substituted as the initial solution.
- (2)
- Based on the following formula to optimize si, ti, the sum of the distance of the collected points to the T-spline surface, is calculated according to Formula (8) and (9).
- (3)
- Cyclically optimize RT and perform step (2) until a certain level of accuracy is achieved.
- (4)
- The distance data of each point corresponding to the formula surface model are retained as the result of the error evaluation through Levenberg-Marquardt method.
4. Experiments
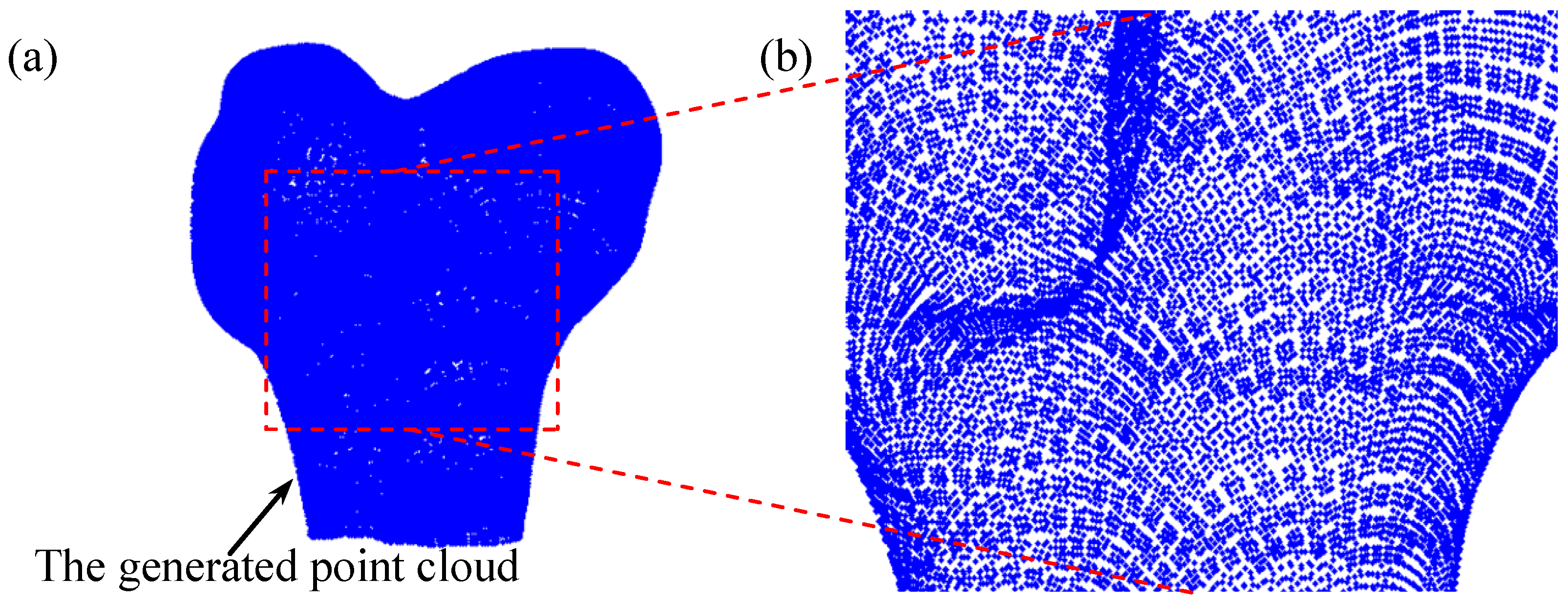
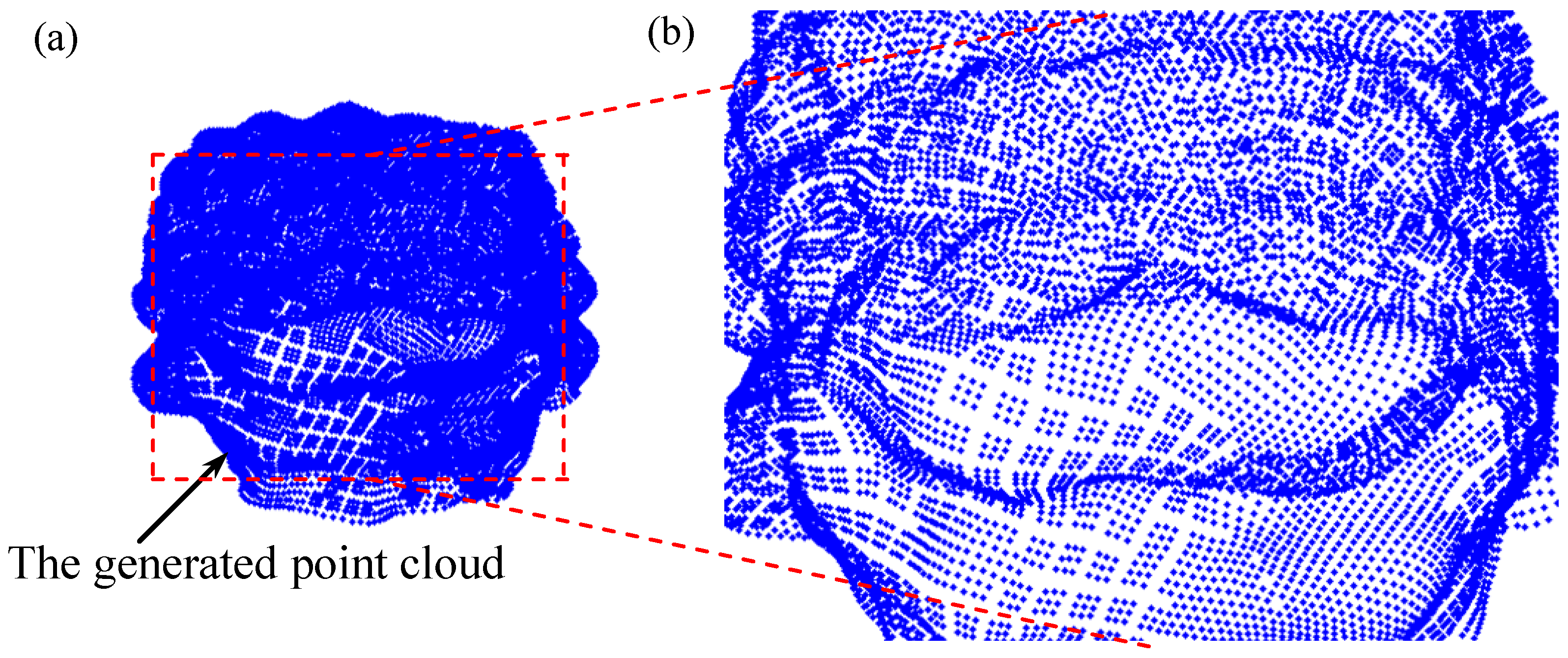
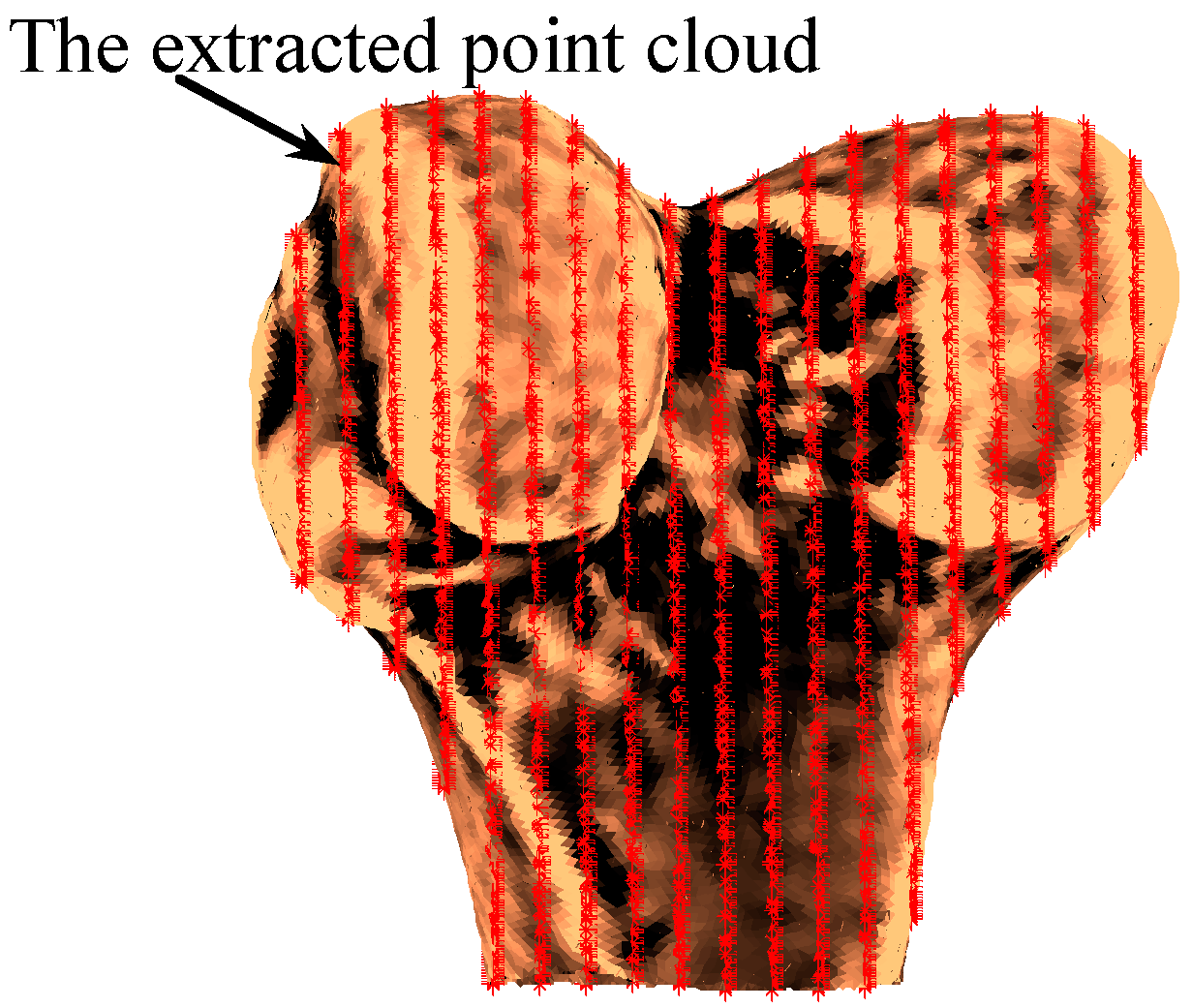
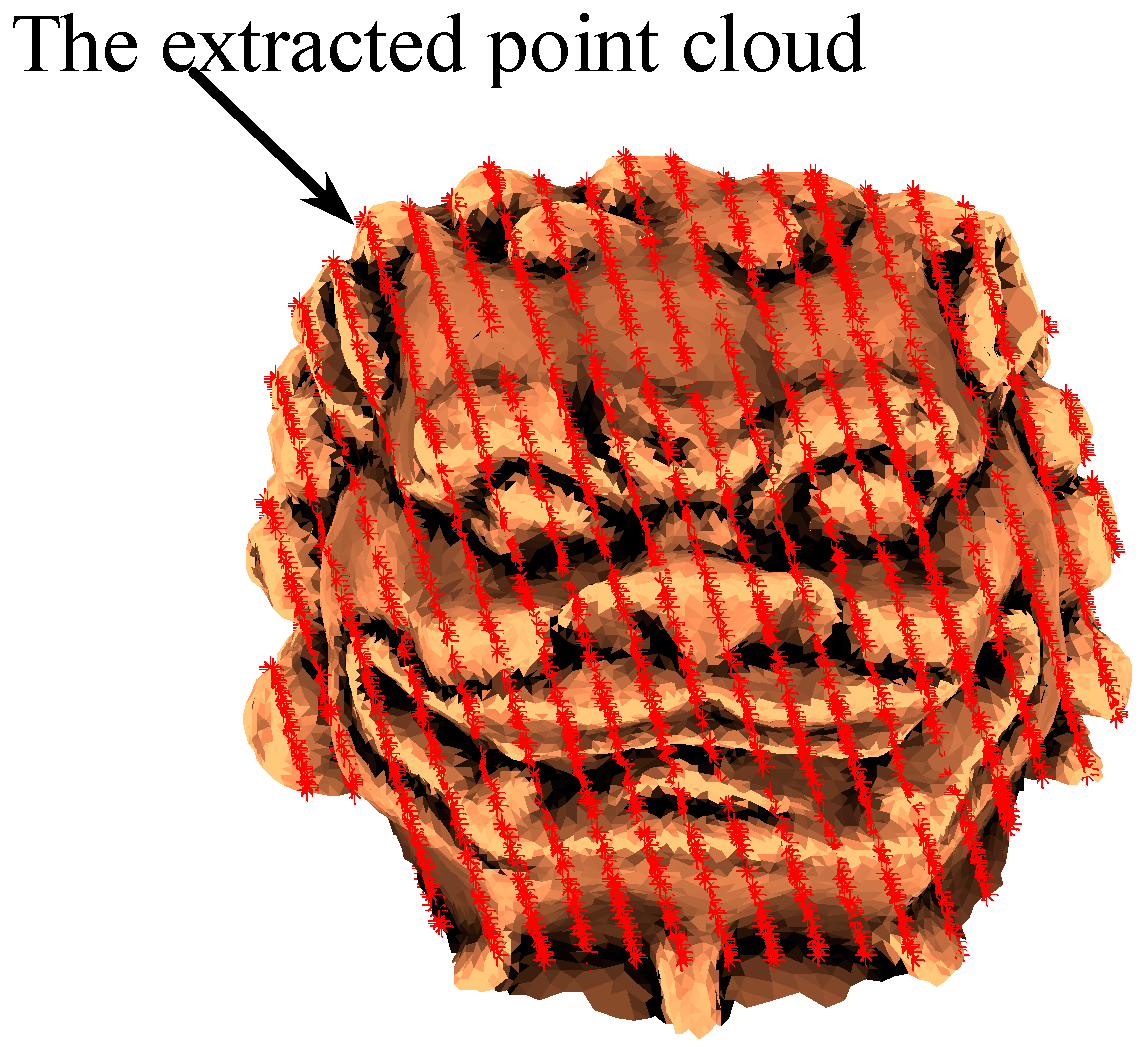
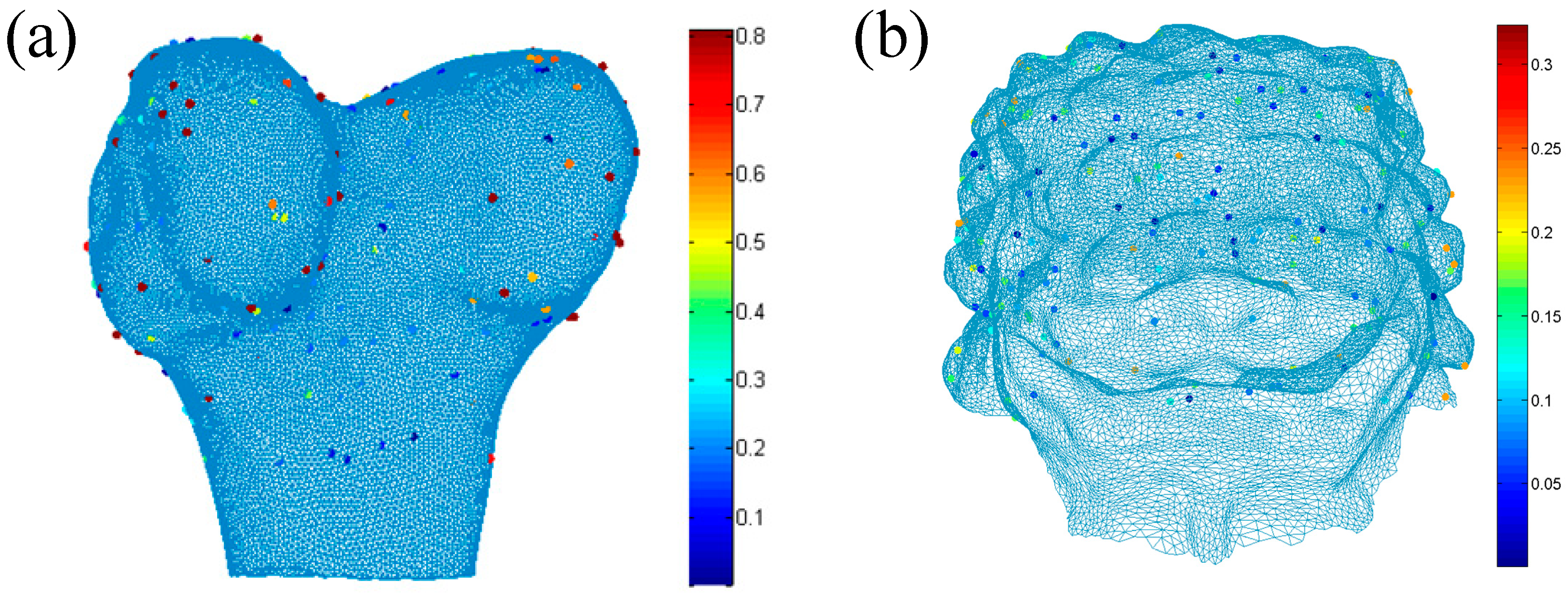
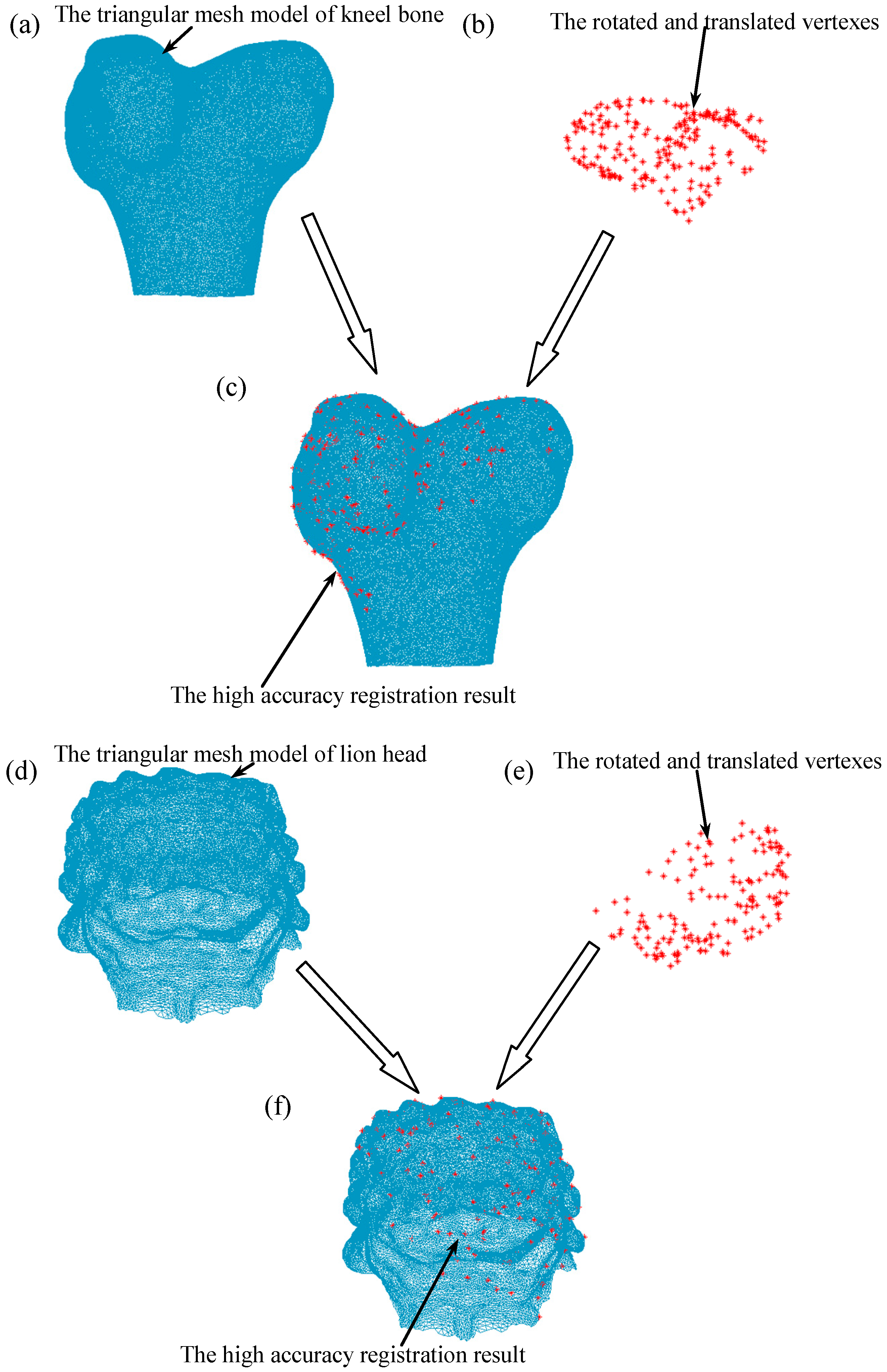
4.1. Workpiece Recognition
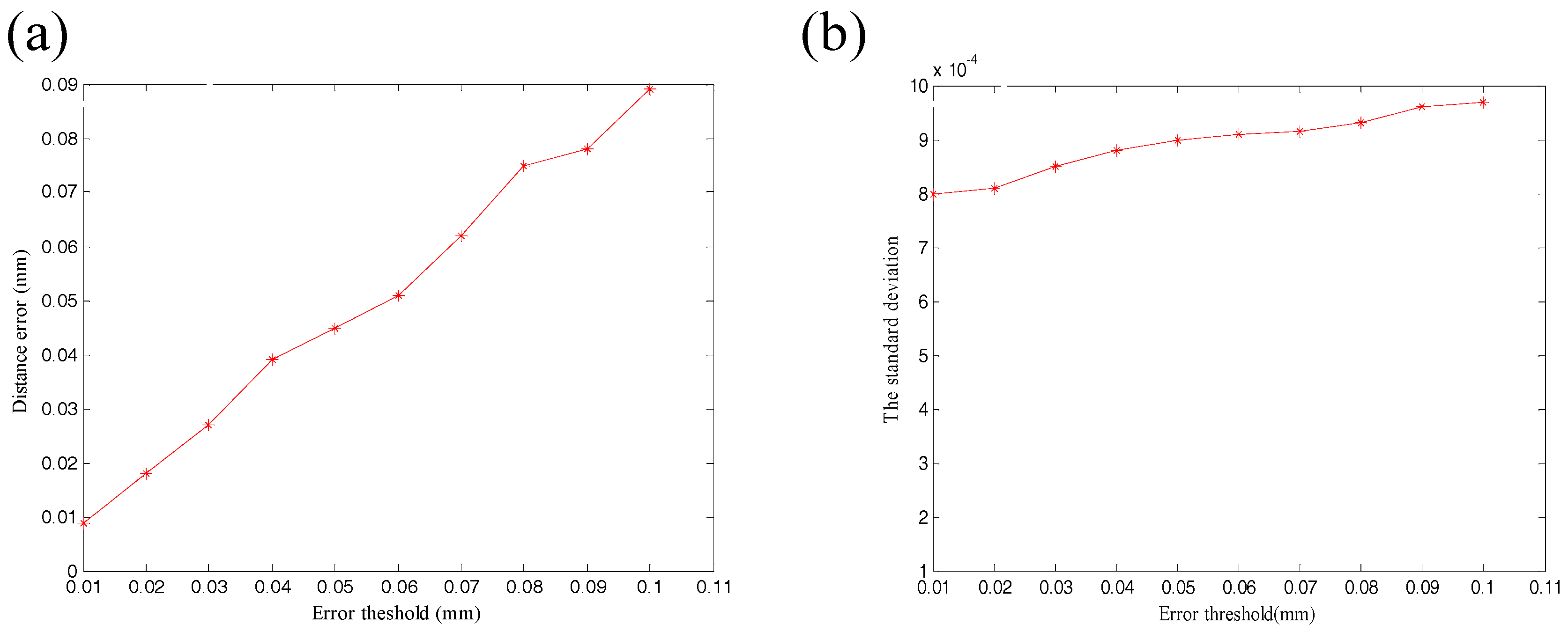
4.2. Error Evaluation
5. Summary
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zhang, G.; Liu, S.; Ma, X.; Wang, J.; Wu, Y.; Li, Z. Towards the intelligent cmm. CIRP Ann.-Manuf. Technol. 2002, 51, 437–442. [Google Scholar] [CrossRef]
- Nobrega, L.H.M.S.; Silva, V.N.; Lima Junior, J.C.; Silva, J.B.A.; Silva, E.C.M.; Andrezza, I.L.P.; Silva, R.F.A. Application of nurbs for obtaining free form curves and surfaces in spur and helical gears by using cmm (coordinate measurement machine). J. Mech. Eng. Autom. 2014, 6, 432–440. [Google Scholar]
- Cowling, G.; Mullineux, G. Toward an intelligent cad-cmm interface. Eng. Comput. 1989, 5, 133–141. [Google Scholar] [CrossRef]
- Huang, F.; Liu, E.; Fang, Y.; Han, N. Single camera stereo vision recognization for parts’ pose based on intelligent three coordinate measuring machine. Opt. Precis. Eng. 2013, 21, 1326–1332. [Google Scholar] [CrossRef]
- Hwang, C.-Y.; Tsai, C.-Y.; Chang, C. Efficient inspection planning for coordinate measuring machines. Int. J. Adv. Manuf. Technol. 2004, 23, 732–742. [Google Scholar] [CrossRef]
- Bai, Y.; Wei, S.; Liu, K.; Wang, X. A strategy to automatically planning measuring path with cmm off line. In Proceedings of the 2010 International Conference on Mechanic Automation and Control Engineering (MACE), Wuhan, China, 26–28 June 2010; pp. 3064–3067. [Google Scholar]
- Cho, M.-W.; Lee, H.; Yoon, G.-S.; Choi, J. A feature-based inspection planning system for coordinate measuring machines. Int. J. Adv. Manuf. Technol. 2005, 26, 1078–1087. [Google Scholar] [CrossRef]
- Stojadinovic, S.M.; Majstorovic, V.D.; Durakbasa, N.M.; Sibalija, T.V. Ants colony optimisation of a measuring path of prismatic parts on a cmm. Metrol. Meas. Syst. 2016, 23, 119–132. [Google Scholar] [CrossRef]
- Schmitt, R.; Zheng, H.; Zhao, X.; Konig, N.; Coelho, R.R. Application of ant colony optimization to inspection planning. In Proceedings of the IEEE International Conference on Computational Intelligence for Measurement Systems and Applications (CIMSA’09), Hong Kong, China, 11–13 May 2009; pp. 71–75. [Google Scholar]
- Hussien, H.A.; Youssef, A.M.; Shoukry, M.K. Automated inspection planning system for cmms. In Proceedings of the 2012 IEEE International Conference on Engineering and Technology (ICET), Cairo, Egypt, 10–11 October 2012; pp. 1–6. [Google Scholar]
- Zhou, Z.; Zhang, Y.; Tang, K. Sweep scan path planning for efficient freeform surface inspection on five-axis cmm. Comput.-Aided Des. 2016, 77, 1–17. [Google Scholar] [CrossRef]
- Mansour, G.; Tsagaris, A.; Mansour, M. Intelligent interaction with cmm. Int. J. Mech. Mech. Eng. 2015, 15, 53–58. [Google Scholar]
- Zhang, H.W. A Study on the Binocular Vision Probe for Sculptured Surface Measurement. Ph.D. Thesis, The School of Precision Instrument & Opto-Electronics Engineering, TianJin Unversity, Tianjin, China, 2002. (In Chinese). [Google Scholar]
- Bardell, R.; Balendran, V.; Sivayoganathan, K. Accuracy analysis of 3d data collection and free-form modelling methods. J. Mater. Process. Technol. 2003, 133, 26–33. [Google Scholar] [CrossRef]
- Poniatowska, M. Deviation model based method of planning accuracy inspection of free-form surfaces using cmms. Measurement 2012, 45, 927–937. [Google Scholar] [CrossRef]
- Chua, C.S.; Jarvis, R. Point signatures: A new representation for 3d object recognition. Int. J. Comput. Vis. 1997, 25, 63–85. [Google Scholar] [CrossRef]
- Yang, J.; Cao, Z.; Zhang, Q. A fast and robust local descriptor for 3d point cloud registration. Inf. Sci. 2016, 346, 163–179. [Google Scholar] [CrossRef]
- Cheng, J.-C.; Don, H.-S. A graph matching approach to 3-d point correspondences. Int. J. Pattern Recognit. Artif. Intell. 1991, 5, 399–412. [Google Scholar] [CrossRef]
- Gruen, A.; Akca, D. Least squares 3d surface and curve matching. ISPRS J. Photogramm. Remote Sens. 2005, 59, 151–174. [Google Scholar] [CrossRef]
- Li, T.; Gao, L.; Li, P.; Pan, Q. An ensemble fruit fly optimization algorithm for solving range image registration to improve quality inspection of free-form surface parts. Inf. Sci. 2016, 367, 953–974. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-d shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Liu, Y. Automatic registration of overlapping 3d point clouds using closest points. Image Vis. Comput. 2006, 24, 762–781. [Google Scholar] [CrossRef]
- Zhang, X.; Zeng, Z.; Liu, X.; Fang, F. Compensation strategy for machining optical freeform surfaces by the combined on-and off-machine measurement. Opt. Express 2015, 23, 24800–24810. [Google Scholar] [CrossRef] [PubMed]
- Sederberg, T.W.; Zheng, J.; Bakenov, A.; Nasri, A. T-splines and T-nurccs. ACM Trans. Graph. (TOG) 2003, 22, 477–484. [Google Scholar] [CrossRef]
- Sederberg, T.W.; Cardon, D.L.; Finnigan, G.T.; North, N.S.; Zheng, J.; Lyche, T. T-spline simplification and local refinement. ACM Trans. Graph. (TOG) 2004, 23, 276–283. [Google Scholar] [CrossRef]
- Li, W.C.; Ray, N.; Lévy, B. Automatic and interactive mesh to t-spline conversion. In Proceedings of the 4th Eurographics Symposium on Geometry (SGP’ 06), Sardinia, Italy, 26–28 June 2006. [Google Scholar]
- Zheng, J.; Wang, Y.; Seah, H.S. Adaptive t-spline surface fitting to z-map models. In Proceedings of the 3rd International Conference on Computer Graphics and Interactive Techniques in Australasia and South East Asia, Dunedin, New Zealand, 30 November–2 December 2005; ACM: New York, NY, USA, 2005; pp. 405–411. [Google Scholar]
- Sederberg, T.W.; Finnigan, G.T.; Li, X.; Lin, H.; Ipson, H. Watertight trimmed nurbs. ACM Trans. Graph. (TOG) 2008, 27, 79. [Google Scholar] [CrossRef]
- He, Y.; Wang, K.; Wang, H.; Gu, X.; Qin, H. Manifold t-spline. In Proceedings of the International Conference on Geometric Modeling and Processing, Pittsburgh, PA, USA, 26–28 July 2006; pp. 409–422. [Google Scholar]
- Peng, X.; Tang, Y. Automatic reconstruction of t-spline surfaces. J. Image Graph. 2010, 15, 1818–1825. [Google Scholar]
- Wang, W.; Zhang, Y.; Xu, G.; Hughes, T.J. Converting an unstructured quadrilateral/hexahedral mesh to a rational t-spline. Comput. Mech. 2012, 50, 65–84. [Google Scholar] [CrossRef]
- Wang, W.; Zhang, Y.; Scott, M.A.; Hughes, T.J. Converting an unstructured quadrilateral mesh to a standard t-spline surface. Comput. Mech. 2011, 48, 477–498. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, J. Curvature-guided adaptive t-spline surface fitting. Comput.-Aided Des. 2013, 45, 1095–1107. [Google Scholar] [CrossRef]
- Lin, H.; Zhang, Z. An efficient method for fitting large data sets using t-splines. SIAM J. Sci. Comput. 2013, 35, A3052–A3068. [Google Scholar] [CrossRef]
- Casquero, H.; Liu, L.; Zhang, Y.; Reali, A.; Kiendl, J.; Gomez, H. Arbitrary-degree t-splines for isogeometric analysis of fully nonlinear kirchhoff–love shells. Comput.-Aided Des. 2017, 82, 140–153. [Google Scholar] [CrossRef]
- Casquero, H.; Liu, L.; Zhang, Y.; Reali, A.; Gomez, H. Isogeometric collocation using analysis-suitable t-splines of arbitrary degree. Comput. Methods Appl. Mech. Eng. 2016, 301, 164–186. [Google Scholar] [CrossRef]
- Finnigan, G.T. Arbitrary Degree T-Splines. Master’s Thesis, Department of Computer Science, Brigham Young University, The City of Provo, UT, USA, 2008. [Google Scholar]
- Liu, S.G.; Song, X.X.; Han, Z.H. High-precision positioning of projected point of spherical target center. Opt. Precis. Eng. 2016, 24, 1861–1870. [Google Scholar]
- Ray, N.; Li, W.C.; Lévy, B.; Sheffer, A.; Alliez, P. Periodic global parameterization. ACM Trans. Graph. (TOG) 2006, 25, 1460–1485. [Google Scholar] [CrossRef]
- Campen, M.; Bommes, D.; Kobbelt, L. Quantized global parametrization. ACM Trans. Graph. 2015, 34, 192:1–192:12. [Google Scholar] [CrossRef]
- Bommes, D.; Zimmer, H.; Kobbelt, L. Mixed-integer quadrangulation. ACM Trans. Graph. (TOG) 2009, 28, 77. [Google Scholar] [CrossRef]
- Choi, P.T.; Lui, L.M. Fast disk conformal parameterization of simply-connected open surfaces. J. Sci. Comput. 2015, 65, 1065–1090. [Google Scholar] [CrossRef]
- Floater, M.S. Mean value coordinates. Comput. Aided Geom. Des. 2003, 20, 19–27. [Google Scholar] [CrossRef]
- Sun, W.; Bradley, C.; Zhang, Y.; Loh, H.T. Cloud data modelling employing a unified, non-redundant triangular mesh. Comput.-Aided Des. 2001, 33, 183–193. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chinese Lion | Girl’s Face | Knee Bone | |
|---|---|---|---|
| Chinese lion | 0.856 | 25.413 | 15.791 |
| Girl’s face | 25.361 | 0.985 | 15.145 |
| Knee bone | 14.832 | 14.107 | 0.913 |
| RT | α (rad) | β (rad) | γ (rad) | tx (mm) | ty (mm) | tz (mm) |
|---|---|---|---|---|---|---|
| Solved RT (lion) | 3.1413 | 0.7853 | 0.7856 | 50.026 | 40.021 | 29.975 |
| Precise RT (lion) | 3.1416 | 0.7854 | 0.7854 | 50 | 40 | 30 |
| Error of RT | 0.0003 | 0.0001 | 0.0002 | 0.026 | 0.021 | 0.025 |
| Solved RT (knee) | 1.5710 | 0.5236 | 1.0471 | 60.022 | 69.972 | 79.983 |
| Precise RT (knee) | 1.5708 | 0.5236 | 1.0472 | 60 | 70 | 80 |
| Error of RT | 0.0002 | 0.0 | 0.0001 | 0.022 | 0.028 | 0.017 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Wang, Y.; Ma, X.; Liu, S.; Zhang, X.; Zhang, G. T-Spline Based Unifying Registration Procedure for Free-Form Surface Workpieces in Intelligent CMM. Appl. Sci. 2017, 7, 1092. https://doi.org/10.3390/app7101092
Han Z, Wang Y, Ma X, Liu S, Zhang X, Zhang G. T-Spline Based Unifying Registration Procedure for Free-Form Surface Workpieces in Intelligent CMM. Applied Sciences. 2017; 7(10):1092. https://doi.org/10.3390/app7101092
Chicago/Turabian StyleHan, Zhenhua, Yingmo Wang, Xinhui Ma, Shugui Liu, Xiaodong Zhang, and Guoxiong Zhang. 2017. "T-Spline Based Unifying Registration Procedure for Free-Form Surface Workpieces in Intelligent CMM" Applied Sciences 7, no. 10: 1092. https://doi.org/10.3390/app7101092
APA StyleHan, Z., Wang, Y., Ma, X., Liu, S., Zhang, X., & Zhang, G. (2017). T-Spline Based Unifying Registration Procedure for Free-Form Surface Workpieces in Intelligent CMM. Applied Sciences, 7(10), 1092. https://doi.org/10.3390/app7101092