Structural Damage Detection with Different Objective Functions in Noisy Conditions Using an Evolutionary Algorithm

 , ,
, ,
Abstract
:1. Introduction
2. Theoretical Background
2.1. Objective Functions
2.1.1. Natural Frequency
2.1.2. Mode Shape
2.1.3. Modal Flexibility
2.1.4. Strain Energy
2.1.5. Noise Addition and Mass Normalization
2.1.6. Damage Parameterization
2.1.7. Regularization in Model Updating Using Evolutionary Algorithm (EA)
3. Damage Detection Case Studies
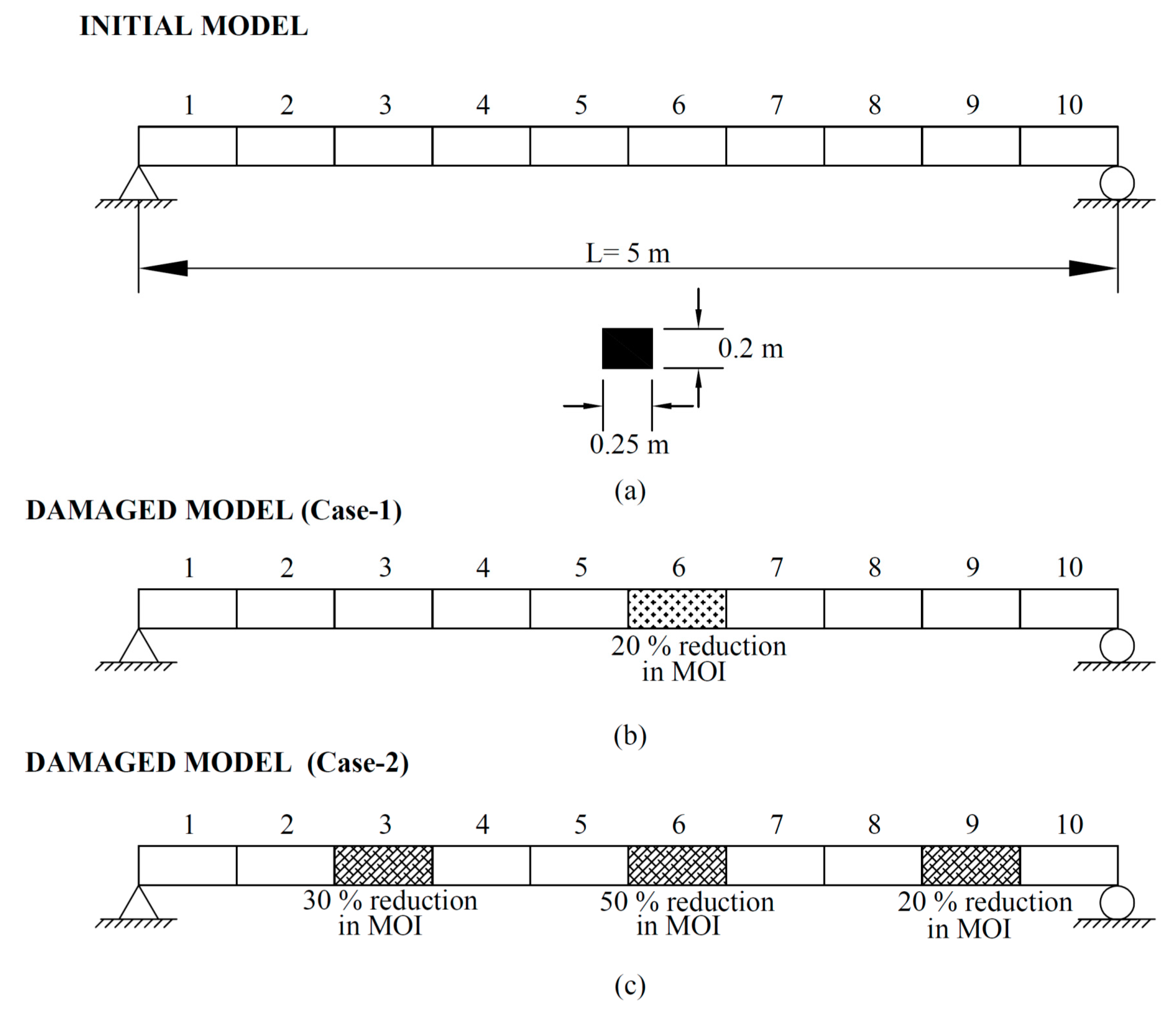
3.1. Simulated Simply Supported Beam 1 (Case 1)
3.2. Simulated Simply Supported Beam 2 (Case 2)
3.3. Experimental Beam (Case 3)
4. Conclusions
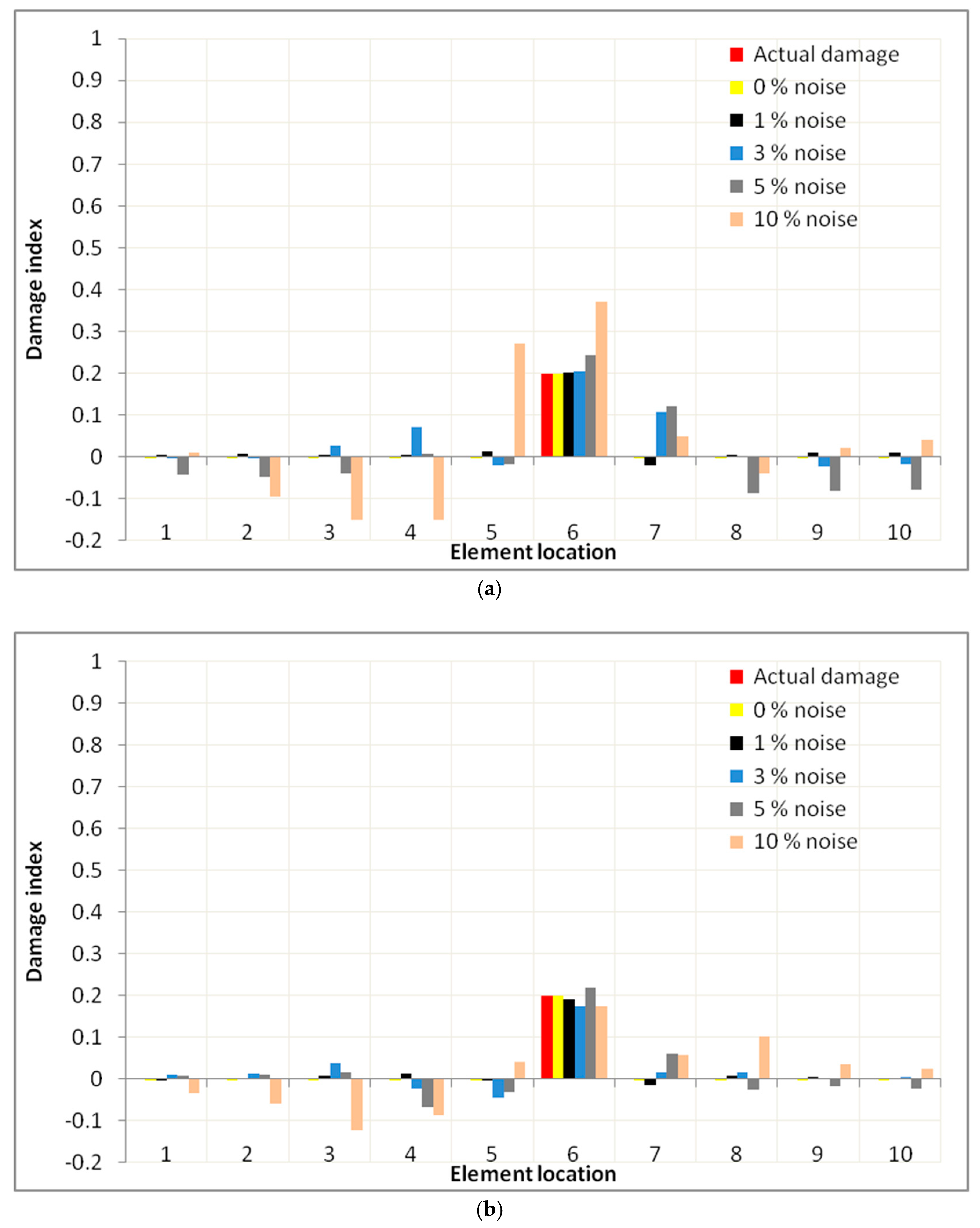
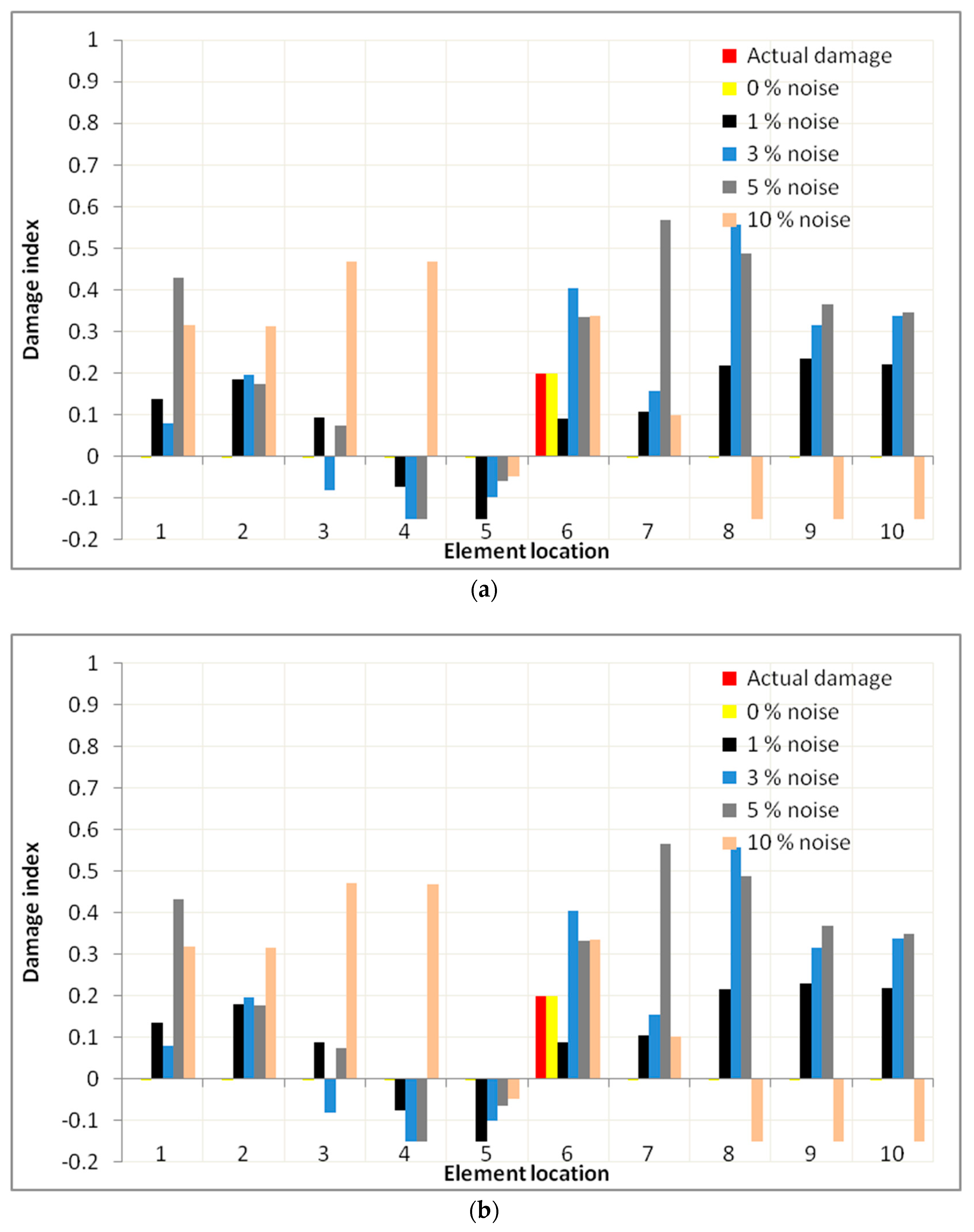
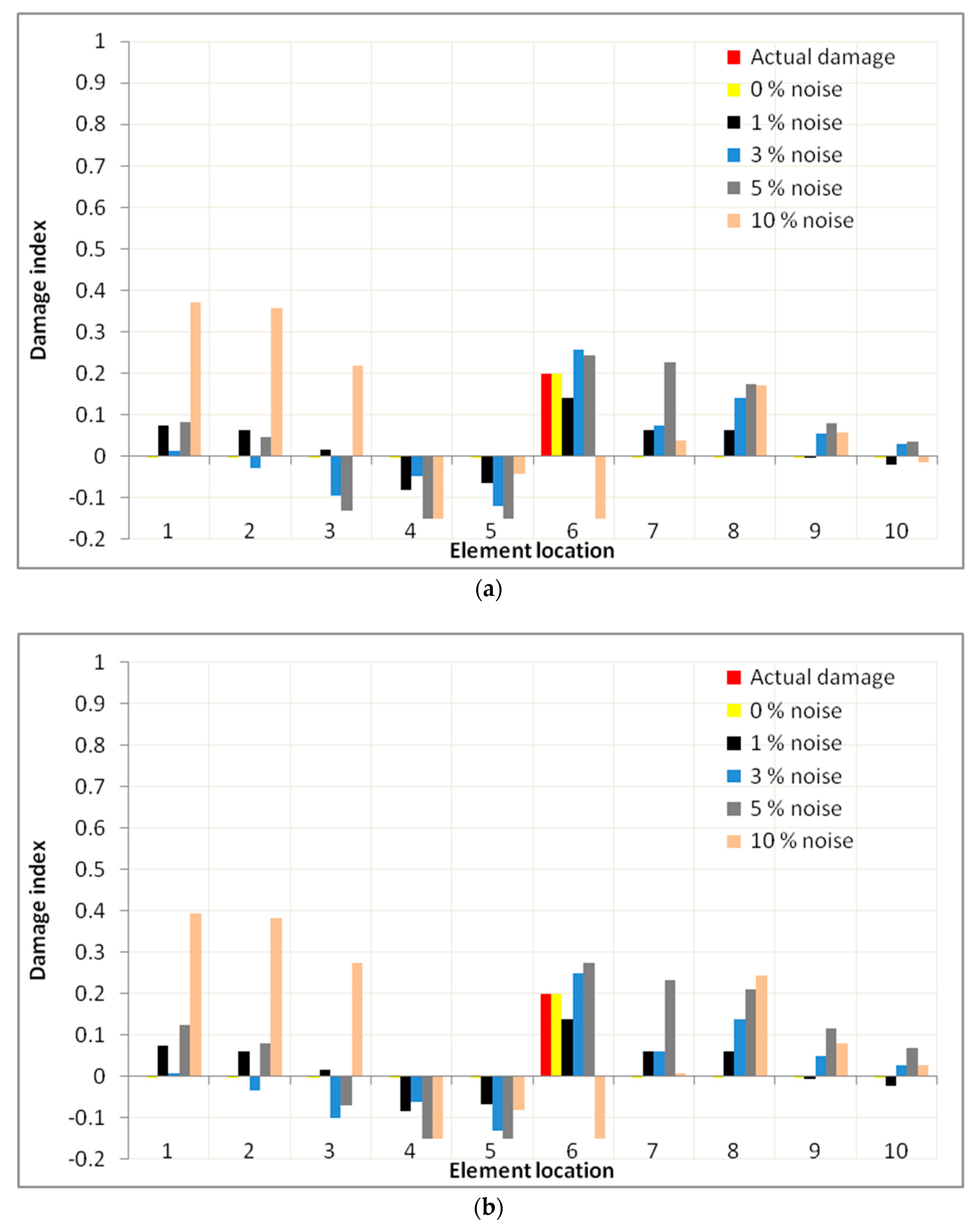
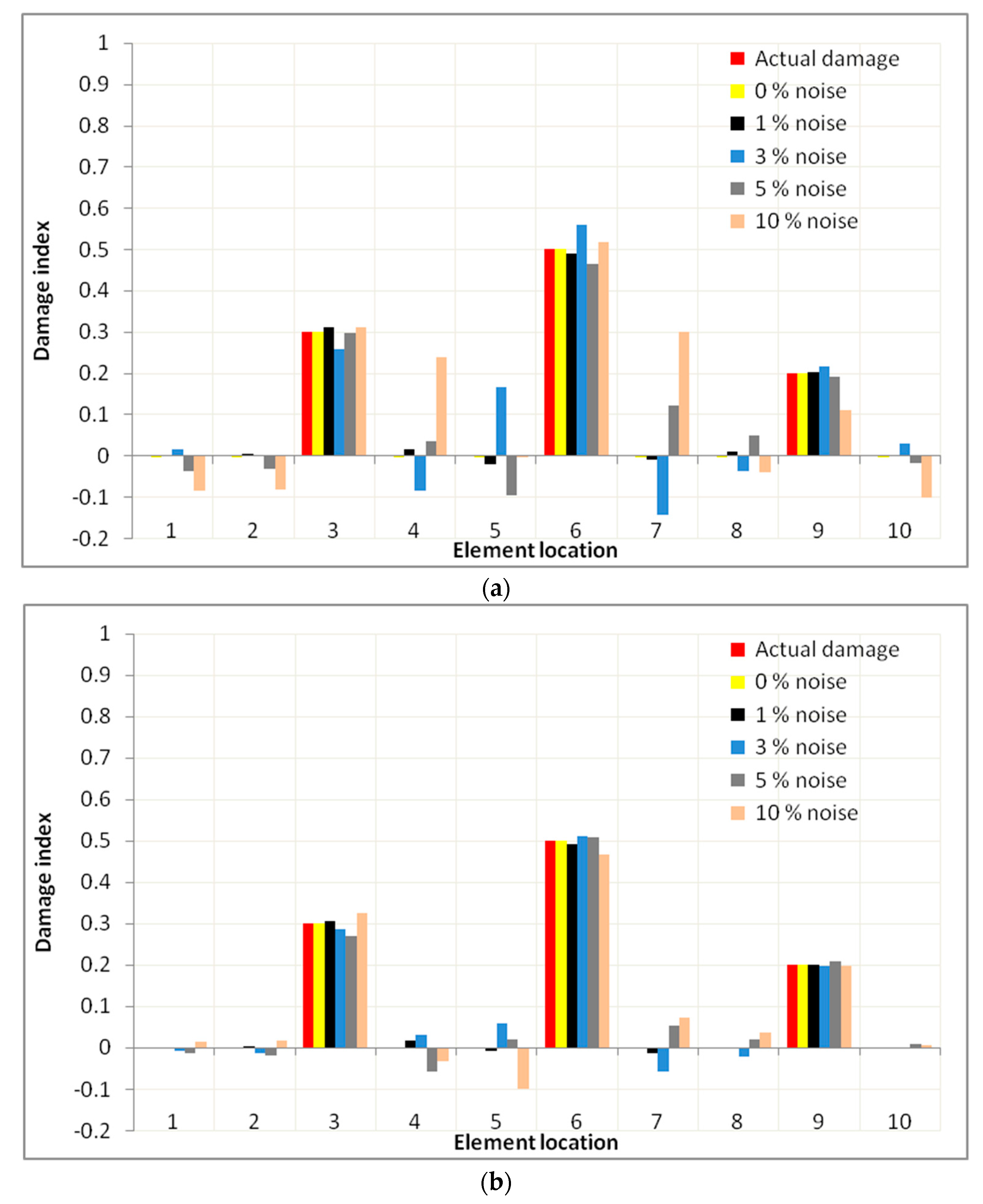
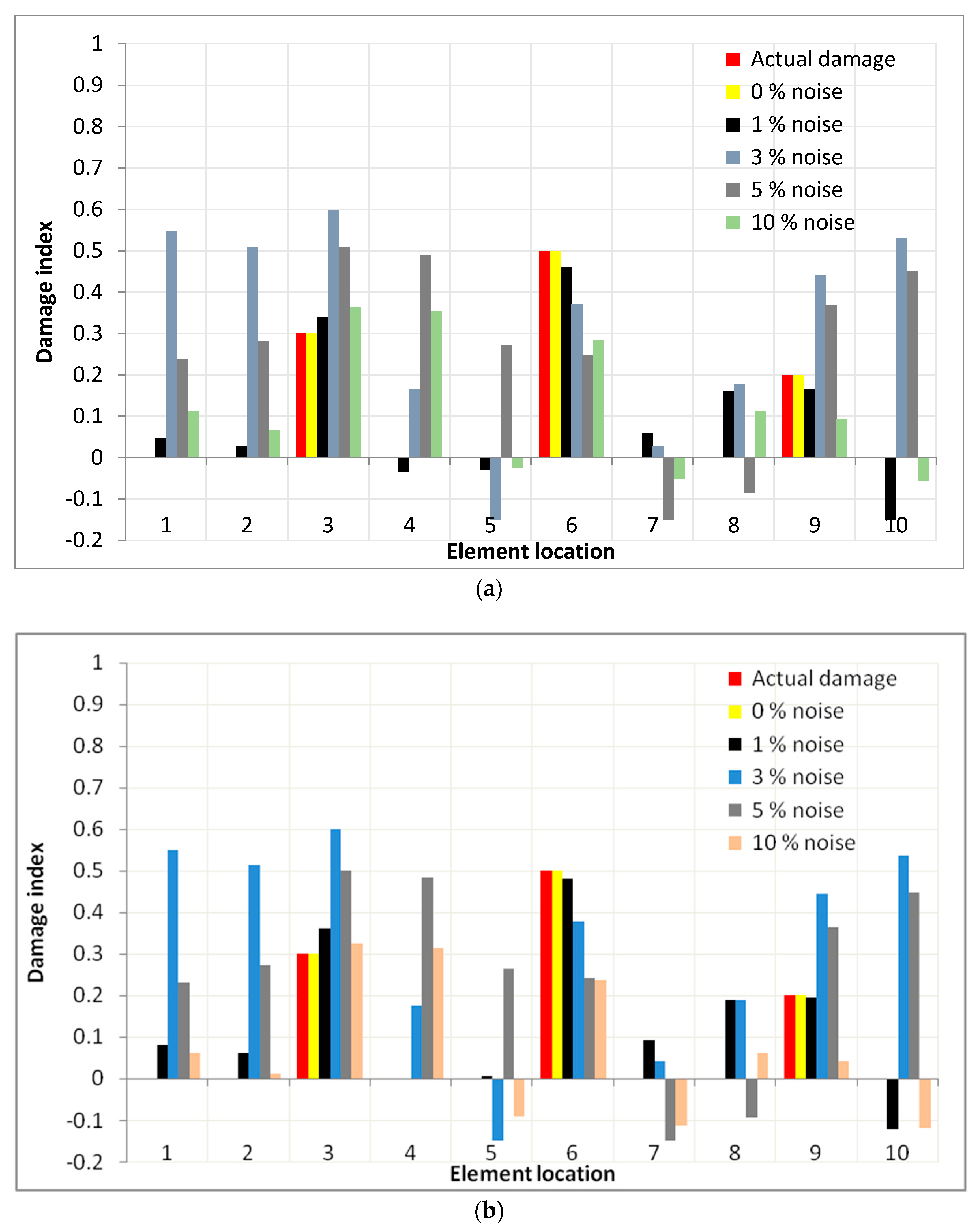
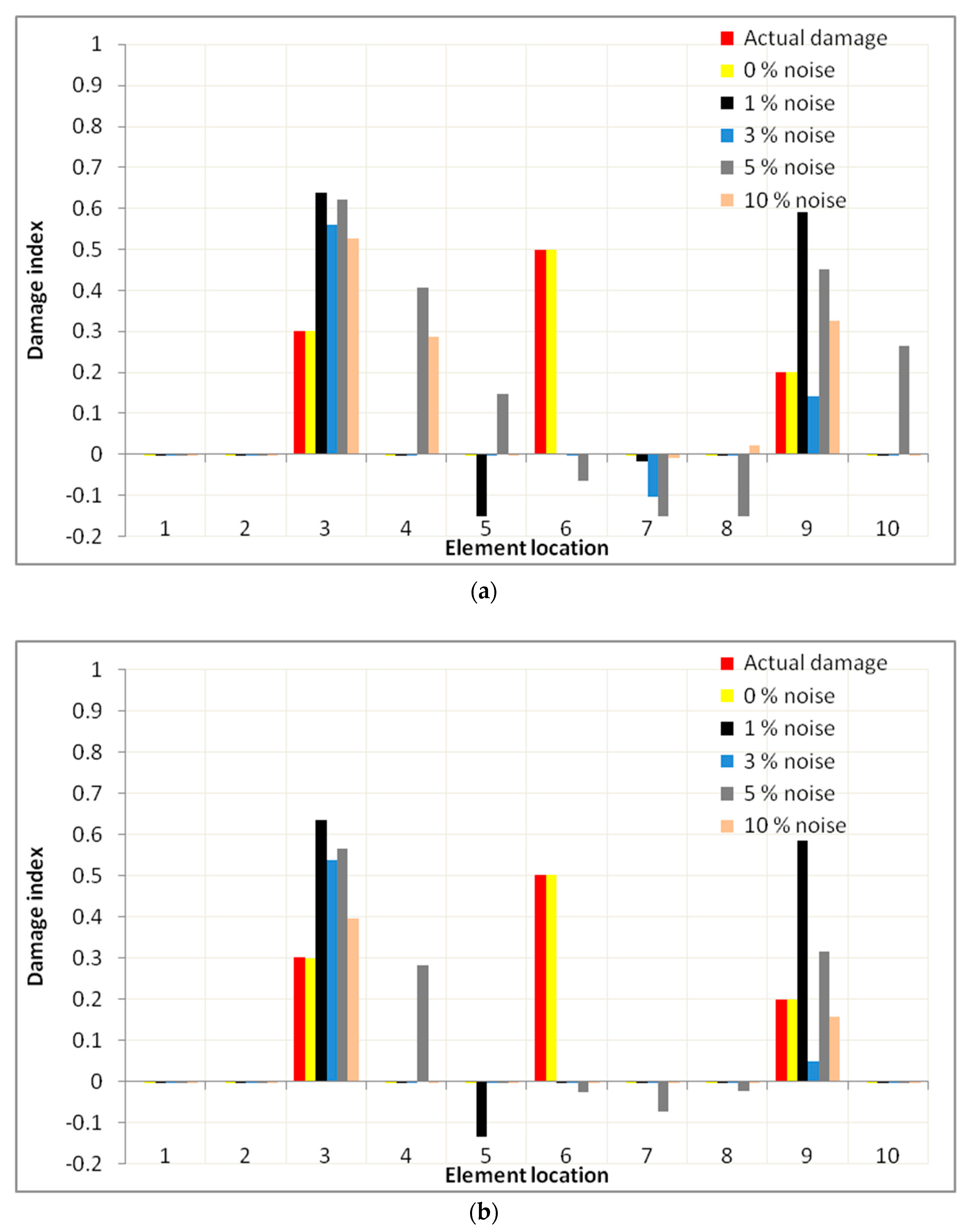
- The simulated beam (Case 1) was investigated with a single damage scenario. First, three mode shapes have been considered for damage assessment for the different objective functions. Two different noise cases, i.e., noise in both frequencies and mode shapes and noise in mode shapes only at 1%, 3%, 5% and 10% have been investigated in the frequency domain. It has been found that with no noise, all the objective functions performed well and detected the damage correctly. However, results indicate that with an increase in the noise, the damage detection capabilities of all the objective functions decreased. Objective Function I based on frequencies and MAC has worked better in damage detection than Objective Functions II and III in noisy conditions. However, less degradation has been seen in the noise in mode shapes-only case as compared to noise both in frequencies and mode shapes. Probable reasons for the better performance of Objective Function I as compared to the other two were also discussed. It was found that the function value of Objective Function I is lesser than Objective Functions II and III.
- A regularization function was added in the objective functions based on the a priori modeling of the structure. The multi-objective GA was used to find the optimal tradeoff between the objective function and the regularization part. The results show that the regularization function performed well even in noisy conditions for Objective Function I.
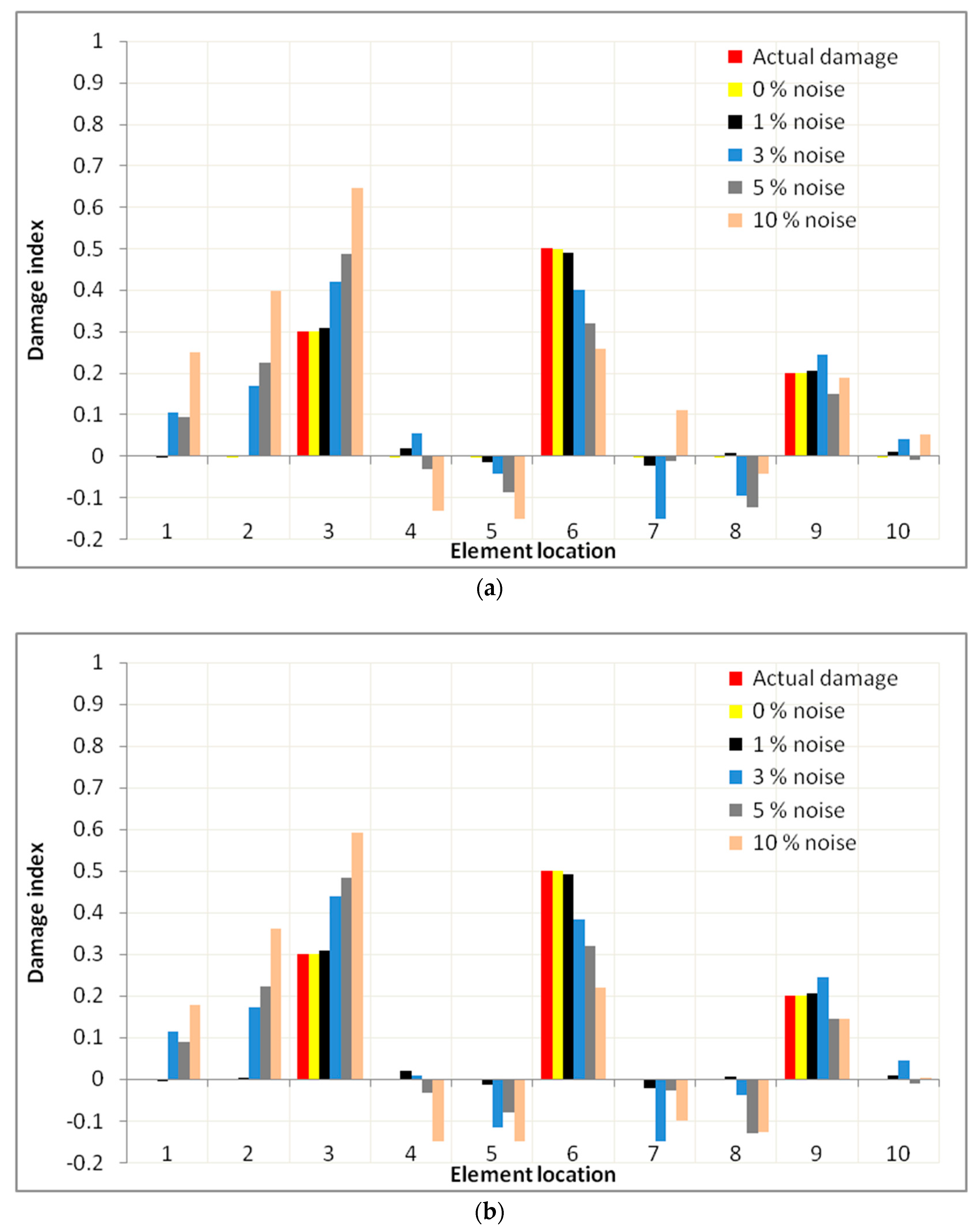
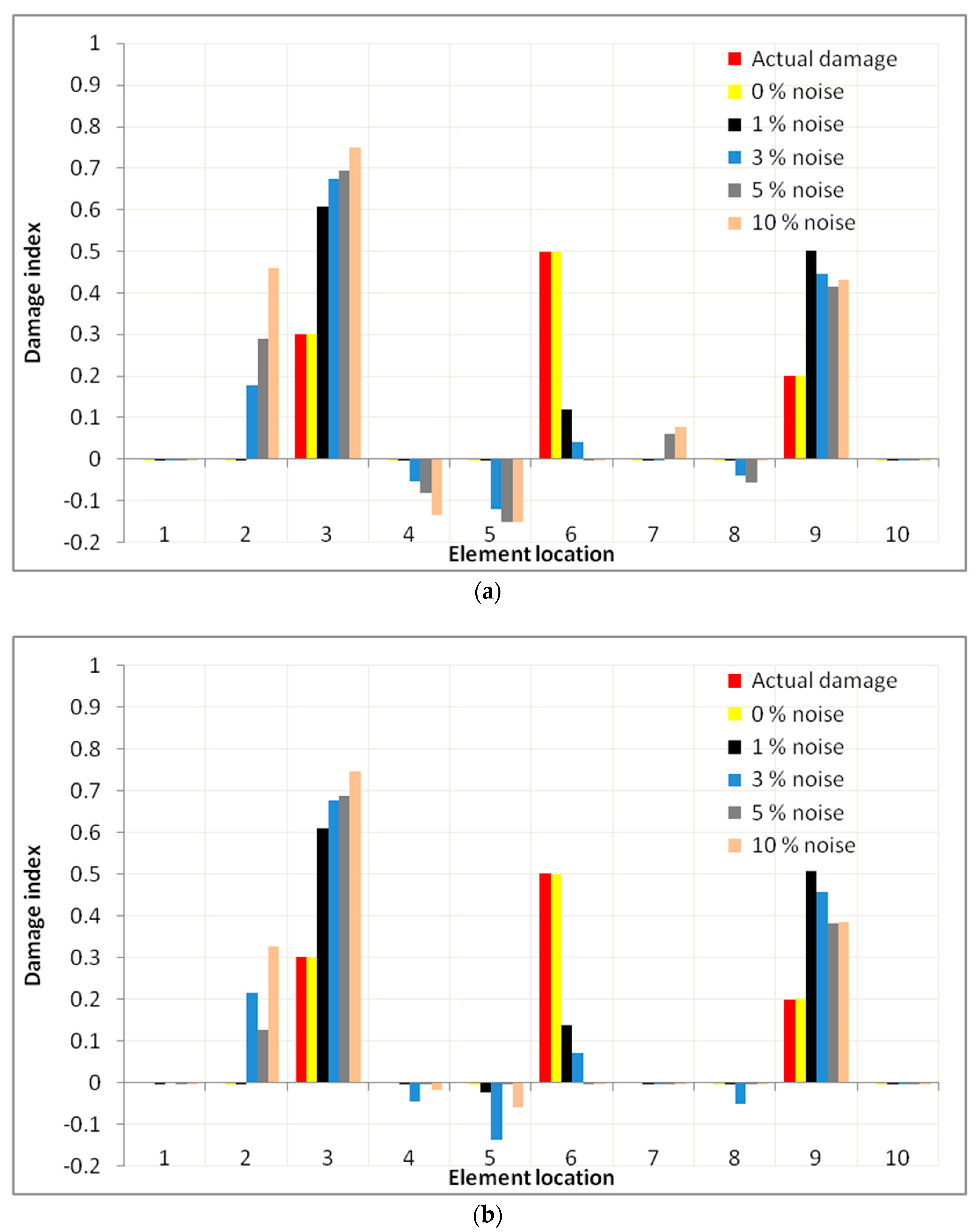
- The multiple damage scenario has been simulated in Case 2 where three elements were damaged. At 0% noise, all the functions detected the damage correctly. However, the performance degraded when noise levels were increased. The regularization function has performed well for Objective Function I only, which proves its adequacy in multiple damage scenarios.
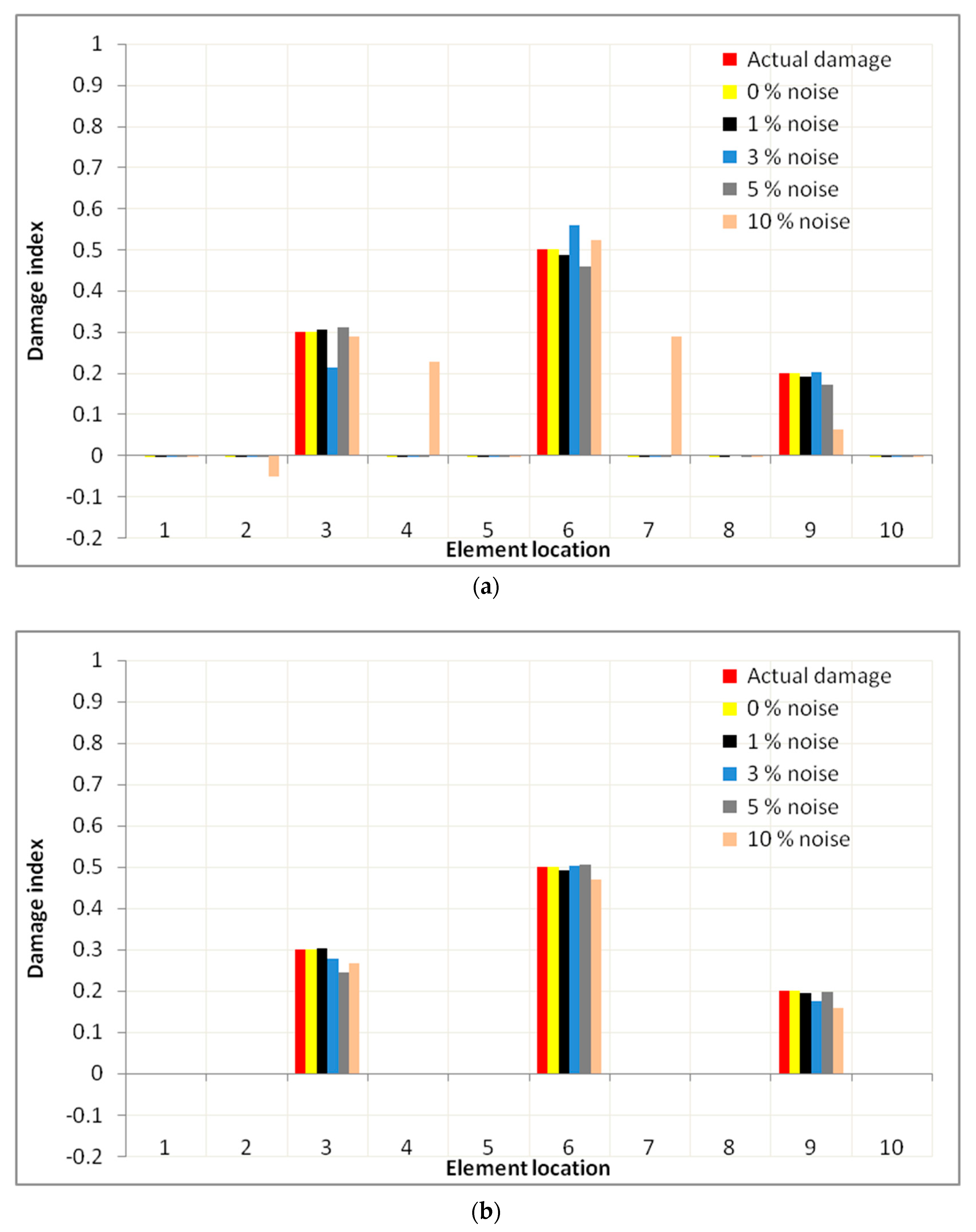
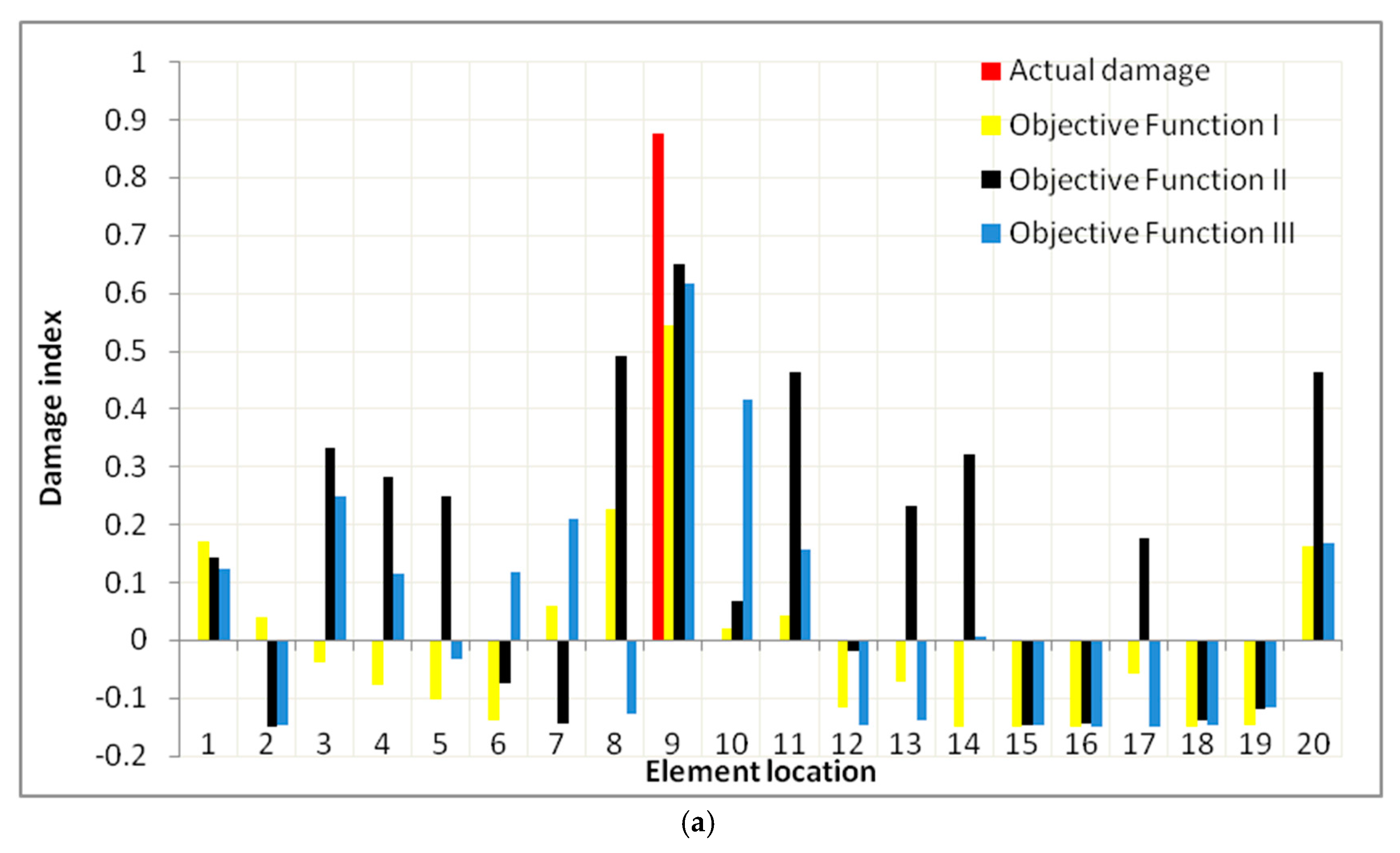
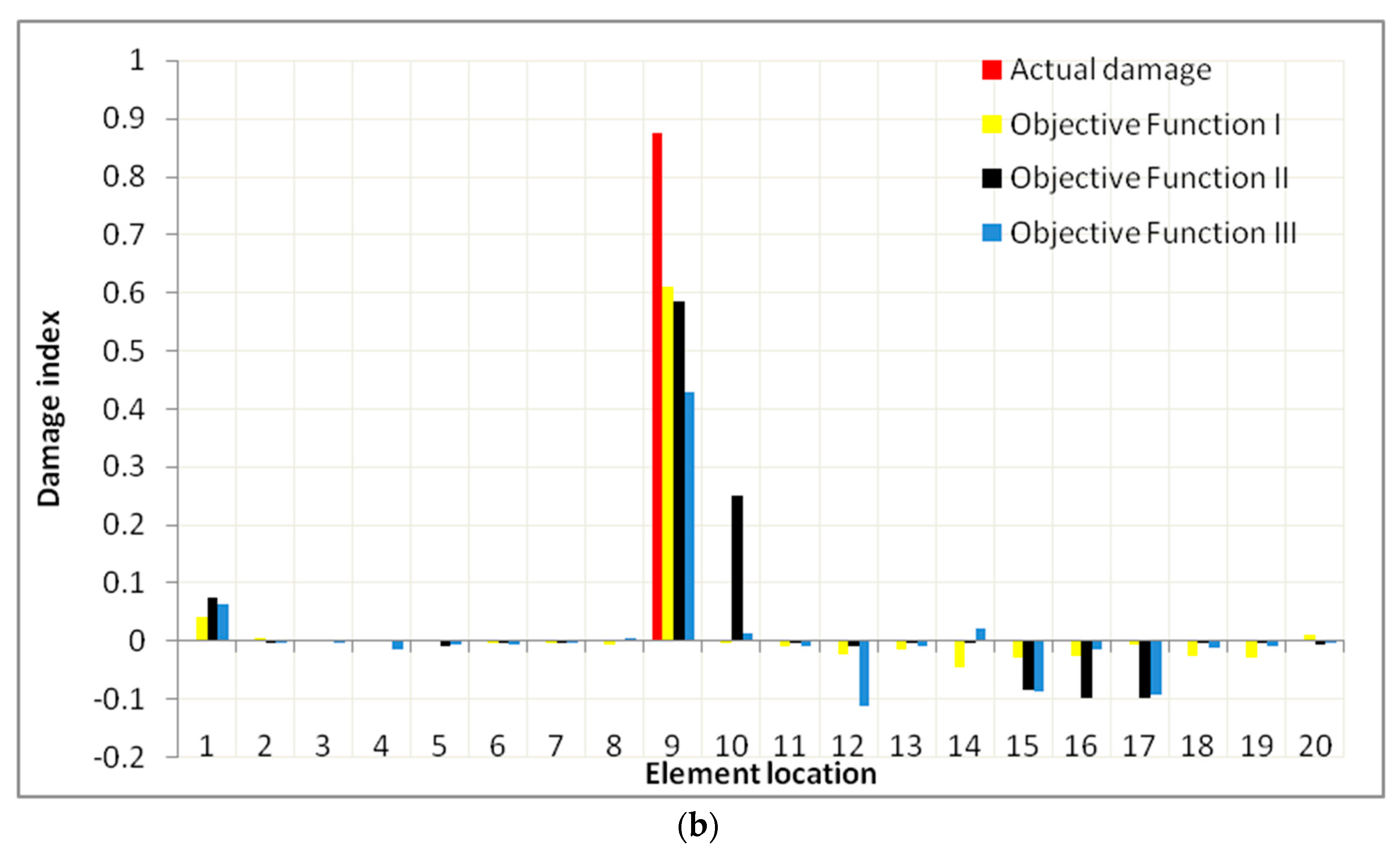
- The simulations were later verified on an experimentally tested beam. Convergence analysis of the SAP 2000 model was performed for the first three natural frequencies, and the 20-node beam was selected for the FE model. It was found that detections in non-damaged elements were of greater magnitude for Objective Functions II and III as compared to Objective Function I. Regularization was attempted for the experimental beam. The damage index was much improved for the damaged, as well as for the undamaged elements for Objective Function I with regularization, which further proves the performance of the proposed approach in actual experimental conditions.
Author Contributions
Conflicts of Interest
References
- Brownjohn, J.M.W.; Xia, P.Q.; Hao, H.; Xia, Y. Civil structure condition assessment by FE model updating: Methodology and case studies. Finite Elem. Anal. Des. 2001, 37, 761–775. [Google Scholar] [CrossRef]
- Moon, F.L.; Aktan, A.E. Impacts of epistemic (bias) uncertainty on structural identification of constructed (civil) systems. Shock Vib. Dig. 2006, 38, 399–420. [Google Scholar] [CrossRef]
- Aktan, A.E.; Helmicki, A.J.; Hunt, V.J. Issues in health monitoring for intelligent infrastructure. Smart Mater. Struct. 1998, 7, 674–692. [Google Scholar] [CrossRef]
- Aktan, A.E.; Catbas, F.N.; Grimmelsman, K.A.; Tsikos, C.J. Issues in infrastructure health monitoring for management. J. Eng. Mech. ASCE 2000, 126, 711–724. [Google Scholar] [CrossRef]
- Ward, H.; Heylen, W. Modal Analysis Theory and Testing; Lammens, S., Sas, P., Eds.; Katholieke Universiteit Leuven: Leuven, Belgium, 1997. [Google Scholar]
- Sensitivity-Based Finite Element Model Updating Methods with Applications to Electronic Equipments. Ph.D. Thesis, Faculte Polytechnique de Mons, Mons, Belgium, 1999. [Google Scholar]
- Kong, X.; Cai, C.-S.; Hu, J. The State-of-the-art on framework of vibration-based structural damage identification for decision making. Appl. Sci. 2017, 7, 497. [Google Scholar] [CrossRef]
- Horst, R.; Pardalos, P.M.; Thoai, N.V. Introduction to Global Optimization; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar]
- Yu, E.; Taciroglu, E.; Wallace, J.W. Parameter identification of framed structures using an improved finite element model-updating method—Part I: Formulation and verification. Earthq. Eng. Struct. Dyn. 2007, 36, 619–639. [Google Scholar] [CrossRef]
- Zivanovic, S.; Pavic, A.; Reynolds, P. Finite element modelling and updating of a lively footbridge: The complete process. J. Sound Vib. 2007, 301, 126–145. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.X. Finite element model updating based on eigenvalue and strain energy residuals using multiobjective optimisation technique. Mech. Syst. Signal Process. 2007, 21, 2295–2317. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.-X. Damage detection by finite element model updating using modal flexibility residual. J. Sound Vib. 2006, 290, 369–387. [Google Scholar] [CrossRef]
- Kalyanmoy, D.; Deb, K. Multi-Objective Optimization Using Evolutionary Algorithms; John Wiley & Sons: Chichester, NY, USA, 2001. [Google Scholar]
- Tebaldi, A.; Dos Santos Coelho, L.; Lopes, V., Jr. Detection of damage in intelligent structures using optimization by a particle swarm: Fundamentals and case studies. Controle Autom. Soc. Bras. Autom. 2006, 17, 312–330. [Google Scholar] [CrossRef]
- Tu, Z.; Lu, Y. FE model updating using artificial boundary conditions with genetic algorithms. Comput. Struct. 2008, 86, 714–727. [Google Scholar] [CrossRef]
- Perera, R.; Torres, R. Structural damage detection via modal data with genetic algorithms. J. Struct. Eng. ASCE 2006, 132, 1491–1501. [Google Scholar] [CrossRef]
- Raich, A.M.; Liszkai, T.R. Improving the performance of structural damage detection methods using advanced genetic algorithms. J. Struct. Eng. ASCE 2007, 133, 449–461. [Google Scholar] [CrossRef]
- Perera, R.; Ruiz, A.; Manzano, C. Performance assessment of multicriteria damage identification genetic algorithms. Comput. Struct. 2009, 87, 120–127. [Google Scholar] [CrossRef]
- Levin, R.I.; Lieven, N.A.J. Dynamic finite element model updating using simulated annealing and genetic algorithms. Mech. Syst. Signal Process. 1998, 12, 91–120. [Google Scholar] [CrossRef]
- Saada, M.M.; Arafa, M.H.; Nassef, A.O. Finite element model updating approach to damage identification in beams using particle swarm optimization. In Proceedings of the 34th Design Automation Conference, Brooklyn, NY, USA, 3–6 August 2008. [Google Scholar]
- Perera, R.; Ruiz, A. A multistage FE updating procedure for damage identification in large-scale structures based on multiobjective evolutionary optimization. Mech. Syst. Signal Process. 2008, 22, 970–991. [Google Scholar] [CrossRef] [Green Version]
- Hoseini Vaez, S.R.; Fallah, N. Damage detection of thin plates using GA-PSO algorithm based on modal data. Arabian J. Sci. Eng. 2017, 42, 1251–1263. [Google Scholar] [CrossRef]
- Fabbrocino, F.; Farina, I.; Berardi, V.P.; Ferreira, A.J.M.; Fraternali, F. On the thrust surface of unreinforced and FRP-/FRCM-reinforced masonry domes. Compos. Part B Eng. 2015, 83, 297–305. [Google Scholar] [CrossRef]
- He, R.-S.; Hwang, S.-F. Damage detection by an adaptive real-parameter simulated annealing genetic algorithm. Comput. Struct. 2006, 84, 2231–2243. [Google Scholar] [CrossRef]
- Jin, S.-S.; Cho, S.; Jung, H.-J.; Lee, J.-J.; Yun, C.-B. A new multi-objective approach to finite element model updating. J. Sound Vib. 2014, 333, 2323–2338. [Google Scholar] [CrossRef]
- Begambre, O.; Laier, J.E. A hybrid particle swarm optimization—Simplex algorithm (PSOS) for structural damage identification. Adv. Eng. Softw. 2009, 40, 883–891. [Google Scholar] [CrossRef]
- Perera, R.; Fang, S.E.; Ruiz, A. Application of particle swarm optimization and genetic algorithms to multiobjective damage identification inverse problems with modelling errors. Meccanica 2010, 45, 723–734. [Google Scholar] [CrossRef]
- Yeo, I.; Shin, S.; Lee, H.S.; Chang, S.-P. Statistical damage assessment of framed structures from static responses. J. Eng. Mech. 2000, 126, 414–421. [Google Scholar] [CrossRef]
- Zhang, Q.; Chang, C.; Chang, T. Finite element model updating for structures with parametric constraints. Earthq. Eng. Struct. Dyn. 2000, 29, 927–944. [Google Scholar] [CrossRef]
- Zang, C.; Chen, G.; Ewins, D. Finite element model updating with modal data. In Proceedings of the 24th International Modal Analysis Conference, Saint Louis, MO, USA, 30 January–2 February 2006. [Google Scholar]
- Li, S.; Brown, D.L. Application of a unified matrix polynomial approach (UMPA) to perturbed boundary condition (PBC) testing. Mech. Syst. Signal Process. 1995, 9, 77–84. [Google Scholar] [CrossRef]
- Schnur, D.; Zabaras, N. Finite element solution of two-dimensional inverse elastic problems using spatial smoothing. Int. J. Numer. Methods Eng. 1990, 30, 57–75. [Google Scholar] [CrossRef]
- Tikhonov, A.N.; Goncharsky, A.; Stepanov, V.; Yagola, A.G. Numerical Methods for the Solution of Ill-Posed Problems; Springer: Berlin, Germany, 1995; Volume 328, pp. 7–63. [Google Scholar]
- Ahmadian, H.; Mottershead, J.E.; Friswell, M.I. Regularisation methods for finite element model updating. Mech. Syst. Signal Process. 1998, 12, 47–64. [Google Scholar] [CrossRef]
- Weber, B.; Paultre, P.; Proulx, J. Structural damage detection using nonlinear parameter identification with Tikhonov regularization. Struct. Control Health Monit. 2007, 14, 406–427. [Google Scholar] [CrossRef]
- Weber, B.; Paultre, P.; Proulx, J. Consistent regularization of nonlinear model updating for damage identification. Mech. Syst. Signal Process. 2009, 23, 1965–1985. [Google Scholar] [CrossRef]
- Titurus, B.; Friswell, M.I. Regularization in model updating. Int. J. Numer. Methods Eng. 2008, 75, 440–478. [Google Scholar] [CrossRef]
- Mottershead, J.E.; Link, M.; Friswell, M.I. The sensitivity method in finite element model updating: A tutorial. Mech. Syst. Signal Process. 2011, 25, 2275–2296. [Google Scholar] [CrossRef]
- Chen, H.-P.; Maung, T.S. Regularised finite element model updating using measured incomplete modal data. J. Sound Vib. 2014, 333, 5566–5582. [Google Scholar] [CrossRef]
- Entezami, A.; Shariatmadar, H.; Sarmadi, H. Structural damage detection by a new iterative regularization method and an improved sensitivity function. J. Sound Vib. 2017, 399, 285–307. [Google Scholar] [CrossRef]
- Grip, N.; Sabourova, N.; Tu, Y. Sensitivity-based model updating for structural damage identification using total variation regularization. Mech. Syst. Signal Process. 2017, 84, 365–383. [Google Scholar] [CrossRef]
- Friswell, M.I.; Mottershead, J.E. Finite Element Model Updating in Structural Dynamics; Kluwer Academic Publishers: Dordrecht, The Netherlands, 1995. [Google Scholar]
- Möller, P.W.; Friberg, O. Updating large finite element models in structural dynamics. AIAA J. 1998, 36, 1861–1868. [Google Scholar] [CrossRef]
- Lemaitre, J. A Course on Damage Mechanics; Springer: Berlin, Germany, 2012. [Google Scholar]
- Hu, N.; Wang, X.; Fukunaga, H.; Yao, Z.H.; Zhang, H.X.; Wu, Z.S. Damage assessment of structures using modal test data. Int. J. Solids Struct. 2001, 38, 3111–3126. [Google Scholar] [CrossRef]
- Friswell, M.I.; Penny, J.E.T. Crack modeling for structural health monitoring. Struct. Health Monit. 2002, 1, 139–148. [Google Scholar] [CrossRef]
- Sinha, J.K.; Friswell, M.I.; Edwards, S. Simplified models for the location of cracks in beam structures using measured vibration data. J. Sound Vib. 2002, 251, 13–38. [Google Scholar] [CrossRef]
- Shabbir, F.; Omenzetter, P. Model updating using genetic algorithms with sequential niche technique. Eng. Struct. 2016, 120, 166–182. [Google Scholar] [CrossRef]
- Pastor, M.; Binda, M.; Harčarik, T. Modal assurance criterion. Procedia Eng. 2012, 48, 543–548. [Google Scholar] [CrossRef]
- Farrar, C.R.; Jauregui, D.A. Comparative study of damage identification algorithms applied to a bridge: II. Numerical study. Smart Mater. Struct. 1998, 7, 720. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial No. | Noise in | Tradeoff Value | |
|---|---|---|---|
| Frequencies (%) | Mode Shapes (%) | ||
| 1 | 0 | 0 | - |
| 2 | 1 | 1 | 1× 10−7 |
| 3 | 3 | 3 | 9 × 10−6 |
| 4 | 5 | 5 | 6 × 10−6 |
| 5 | 10 | 10 | 3 × 10−4 |
| 6 | 0 | 1 | 1 × 10−10 |
| 7 | 0 | 3 | 7 × 10−7 |
| 8 | 0 | 5 | 6 × 10−7 |
| 9 | 0 | 10 | 4 × 10−6 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shabbir, F.; Khan, M.I.; Ahmad, N.; Tahir, M.F.; Ejaz, N.; Hussain, J. Structural Damage Detection with Different Objective Functions in Noisy Conditions Using an Evolutionary Algorithm. Appl. Sci. 2017, 7, 1245. https://doi.org/10.3390/app7121245
Shabbir F, Khan MI, Ahmad N, Tahir MF, Ejaz N, Hussain J. Structural Damage Detection with Different Objective Functions in Noisy Conditions Using an Evolutionary Algorithm. Applied Sciences. 2017; 7(12):1245. https://doi.org/10.3390/app7121245
Chicago/Turabian StyleShabbir, Faisal, Muhammad Imran Khan, Naveed Ahmad, Muhammad Fiaz Tahir, Naeem Ejaz, and Jawad Hussain. 2017. "Structural Damage Detection with Different Objective Functions in Noisy Conditions Using an Evolutionary Algorithm" Applied Sciences 7, no. 12: 1245. https://doi.org/10.3390/app7121245
APA StyleShabbir, F., Khan, M. I., Ahmad, N., Tahir, M. F., Ejaz, N., & Hussain, J. (2017). Structural Damage Detection with Different Objective Functions in Noisy Conditions Using an Evolutionary Algorithm. Applied Sciences, 7(12), 1245. https://doi.org/10.3390/app7121245