Fault Diagnosis of Roller Bearings Based on a Wavelet Neural Network and Manifold Learning


Abstract
:1. Introduction
2. Prognostics Method Based on Manifold Learning and a Wavelet Neural Network
High-Dimensional Feature Signal Extraction
3. Materials and Methods
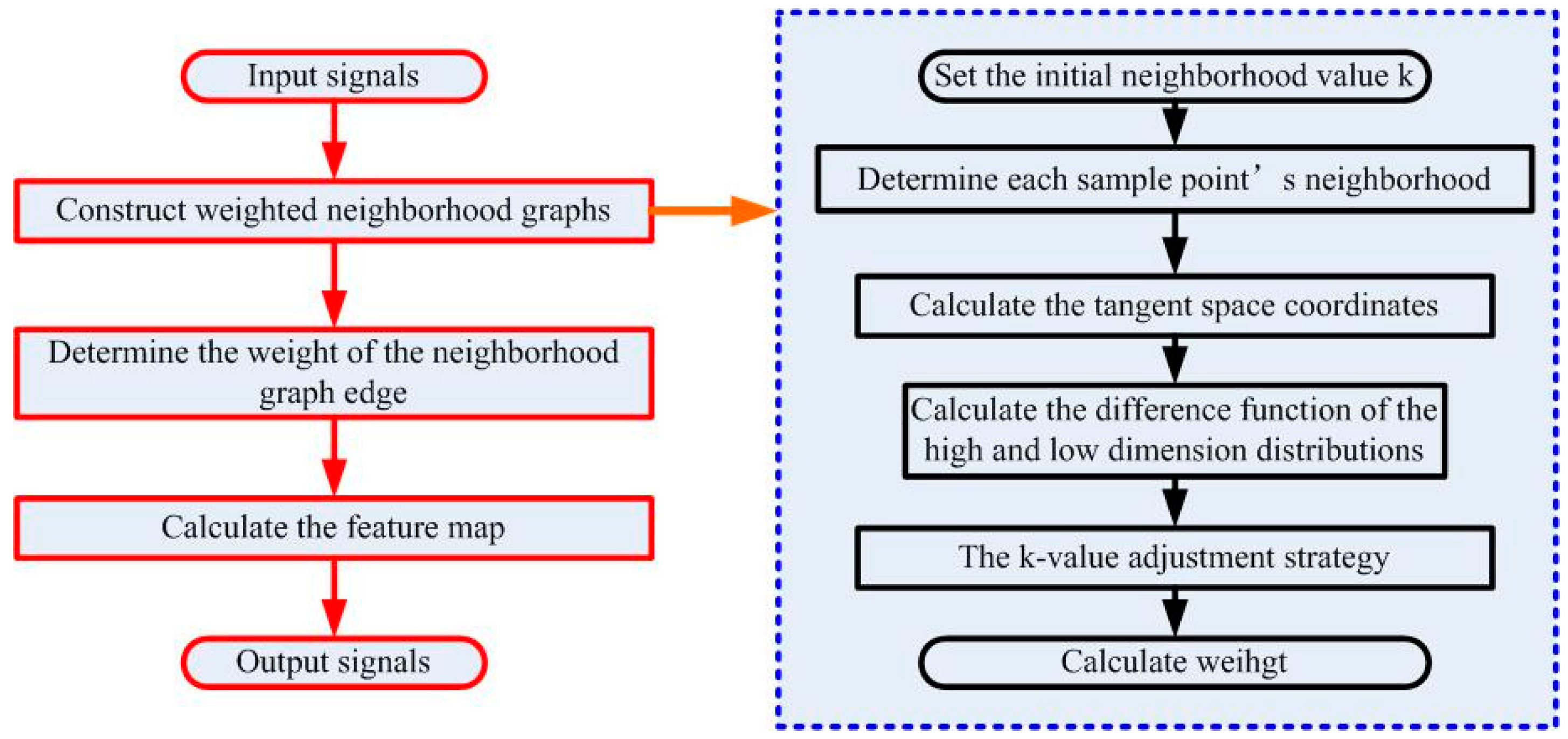
3.1. ILE Algorithm
- Set the initial neighborhood value k, according to the principle of KNN for each of the sample points to determine the neighborhood, ;
- For each of the resulting neighborhoods, we can calculate the tangent space coordinates that correspond to the neighborhood points [20].where Mapping function of neighborhood points to local tangent space coordinates can be expressed as a Equation (2) based on Taylor series expansion.where . is the scale factor. is defined as the threshold. When , the local neighborhood obtained from the k-value is considered to be linearly represented by the tangent plane, which is in accordance with the characteristics of the ideal neighborhood, .
- Calculate the difference function of a high and low dimension distribution.The difference function of the high and low dimension distribution of all points in the i-th neighborhood is defined as follows [21]:where is the distribution function of the j-th neighborhood point of the i-th high-dimensional sample point; and is the distribution function of the Euclidean distance of the low-dimensional neighborhood point. The k-value adjustment strategy is shown in Equation (4):where
- Assume that the neighborhood weights of each sample point is . Calculate the weight using the following equation:The initial value of weight is one by default. is the adjustment factor, is the update operator, and the small weight points will be removed as invalid neighborhood points while the remaining ones will be reserved as effective neighborhood points.
3.2. Wavelet Neural Network
4. Application
4.1. Experimental Subject
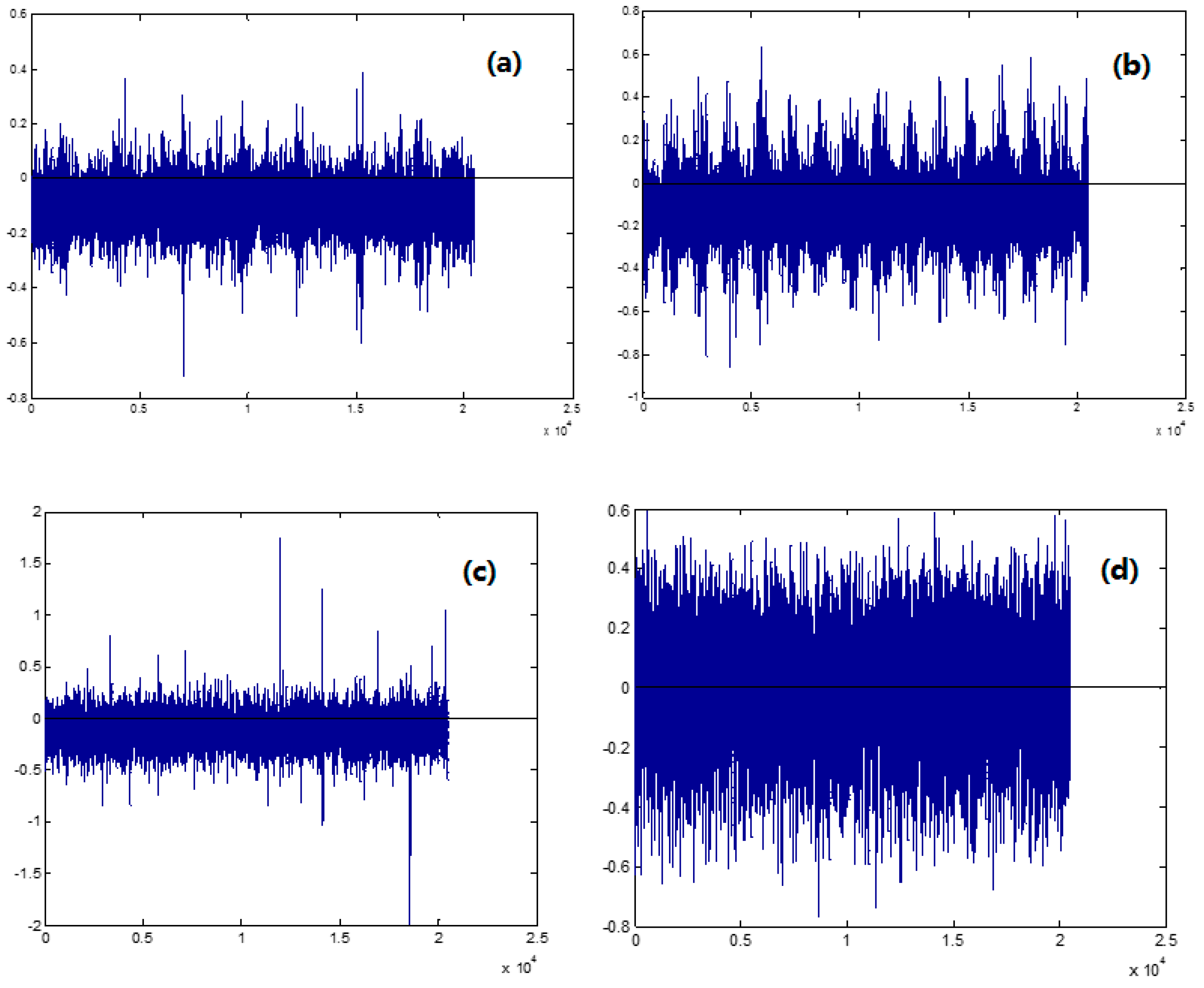
4.2. Roller Bearing Vibration Signals
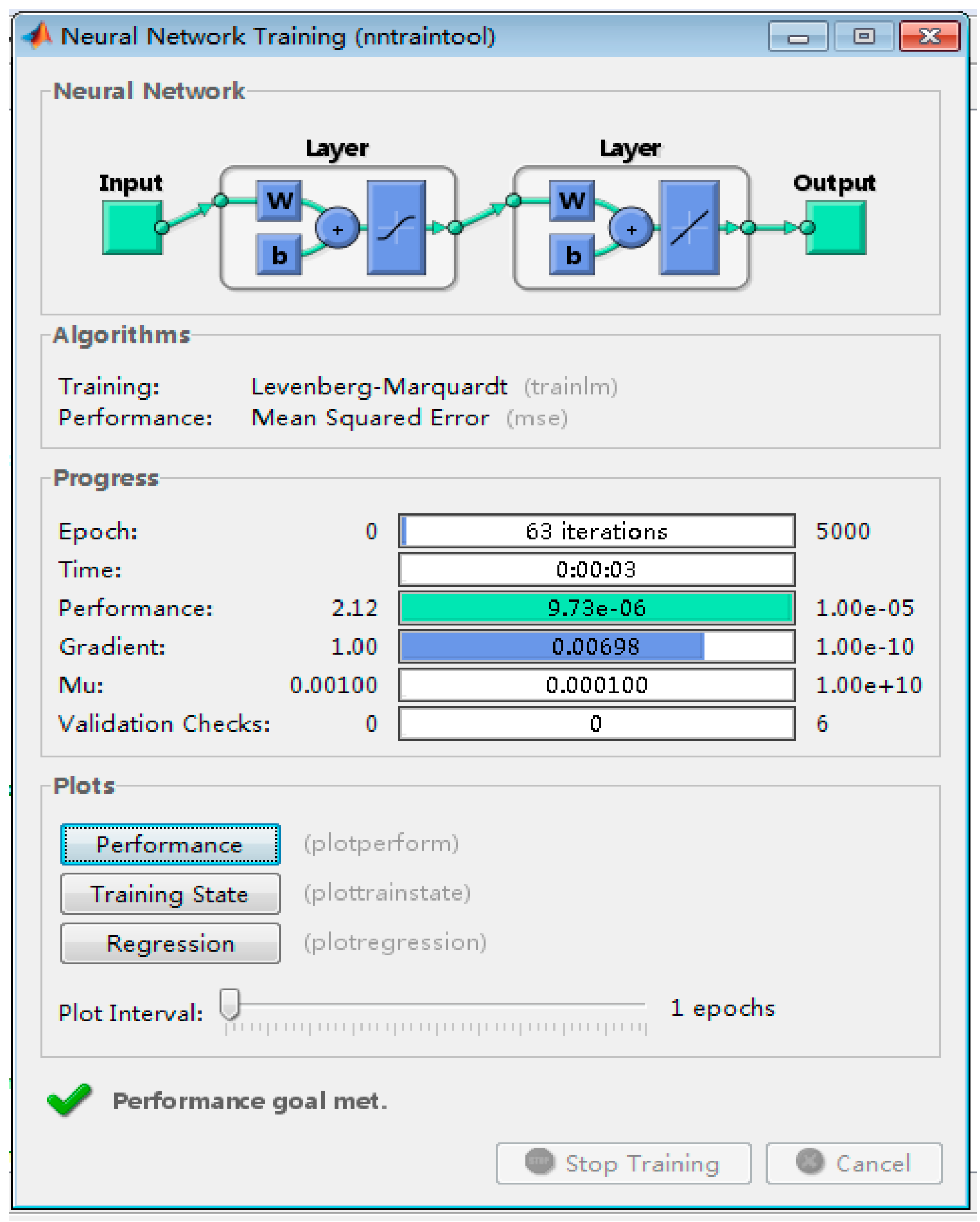
4.3. Diagnosis of a Wavelet Neural Network
5. Conclusions
- (1)
- The performance of LE depends greatly on the neighborhoods k. Generally, k is valued according to experience. We proposed an improved LE algorithm that allows for adaptive change for any given k. The experimental results demonstrated that the proposed method can effectively obtain k and extract the feature signals of the roller bearings.
- (2)
- Based on the feature signals and the integration of the merits of wavelet transform with that of an artificial neural network, we constructed a wavelet neural network for fault identification and classification. The experimental results indicate that this proposed method has excellent clinical practical value, with a classification accuracy rate of 100%.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Xiang, D.; Cen, J. Method of roller bearing fault diagnosis based on information feature fusion of EMD entropy. J. Aerosp. Power 2015, 30, 1149–1154. [Google Scholar]
- Li, Y.; Xu, M.; Wei, Y.; Huang, W. A new rolling bearing fault diagnosis method based on multiscale permutation entropy and improved support vector machine based binary tree. Measurement 2016, 77, 80–94. [Google Scholar] [CrossRef]
- Urbanek, J.; Barszcz, T.; Uhl, T. Comparison of Advanced Signal-Processing Methods for Roller Bearing Faults Detection. Metrol. Meas. Syst. 2016, 19, 715–726. [Google Scholar]
- Li, Y.; Xu, M.; Zhao, H.; Huang, W. Hierarchical fuzzy entropy and improved support vector machine based binary tree approach for rolling bearing fault diagnosis. Mech. Mach. Theory 2016, 98, 114–132. [Google Scholar] [CrossRef]
- Cao, H.; Fan, F.; Zhou, K.; He, H. Wheel-bearing Fault Diagnosis of Trains using Empirical Wavelet Transform. Measurement 2016, 82, 439–449. [Google Scholar] [CrossRef]
- Rauber, T.W.; De, A.B.F.; Varejao, F.M. Heterogeneous Feature Models and Feature Selection Applied to Bearing Fault Diagnosis. IEEE Trans. Ind. Electron. 2015, 62, 637–646. [Google Scholar] [CrossRef]
- Sui, W.T.; Zhang, D.; Wang, W. Fault diagnosis of rolling element bearings based on EMD and MKD. J. Vib. Shock 2010, 29, 107–110. [Google Scholar]
- Wu, Z.; Yang, S.; Ren, B. Rolling element bearing fault diagnosis method based on NAMEMD and multi-scale morphology. J. Vib. Shock 2016, 35, 127–133. [Google Scholar]
- Wang, J.; Li, J.; Wan, X. Fault feature extraction method of rolling bearings based on singular value decomposition and local mean decomposition. J. Mech. Eng. 2015, 3, 104–110. [Google Scholar] [CrossRef]
- Ma, L.; Kang, J.; Meng, Y. Research on feature extraction of rolling bearing incipient fault based on Morlet wavelet transform. Chin. J. Sci. Inst. 2013, 34, 920–926. [Google Scholar]
- Huang, H.; Han, Z.; Zhang, Q. Method of fault diagnosis for rolling bearings based on Laplacian eigenmap. J. Vib. Shock 2015, 5, 128–134. [Google Scholar]
- Rowei, S.T.; Saul, L.K. Nonlinear dimensionality reduction by locally linear embedding. J. Sci. 2000, 290, 2323–2326. [Google Scholar] [CrossRef] [PubMed]
- Tenenbaum, J.B.; De Silva, B.; Lagford, J.C. A global geometric framework for nonlinear dimensionality reduction. J. Sci. 2000, 290, 2319–2323. [Google Scholar] [CrossRef] [PubMed]
- Belkin, M.; Niyogi, P. Laplacian Eigen maps for dimensionality reduction and data representation. J. Neural Comput. 2003, 15, 1373–1396. [Google Scholar] [CrossRef]
- Ge, C.; Liu, X.Y.; Ding, S. Analysis and compare in manifold learning. J. Shandong Normal Univ. (Nat. Sci.) 2010, 25, 15–17. [Google Scholar]
- Huang, H.; Zhang, Q.; Han, Z.; Lin, X.; Liu, Q. Application of laplacian eigenmap in fault diagnosis of rolling bear. J. China Meas. Test 2015, 41, 94–98. [Google Scholar]
- Xu, Q.; Liu, Y.; Tian, D. Fault diagnosis of rolling bearings using least square support vector regression based on glowworm swarm optimization algorithm. J. Vib. Shock 2014, 10, 8–12. [Google Scholar]
- Sun, B.; Liang, C.; Shang, D. Rolling bearings fault diagnosis based on recurrence complex network. J. Vib. Meas. Diagn. 2015, 3, 578–584. [Google Scholar]
- Wang, B.; Li, H.; Chen, Q. Rolling bearing performance degradative state recognition based on mathematical morphological fractal dimension and fuzzy center means. Acta Armamentarh. 2015, 36, 1982–1990. [Google Scholar]
- Jing, W.; Zhen, Y.Z.; Hong, Y. Adaptive Manifold Learning. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 253–265. [Google Scholar]
- Martin, H.J.A.; De Lope, J.; Maravall, D. Robust high performance reinforcement learning through weighted k-nearest neighbors. J. Neuro-Comput. 2011, 74, 1251–1259. [Google Scholar] [CrossRef]
- Zhang, Q.; Benveniste, A. Wavelet networks. IEEE Trans. Neural Netw. 1992, 3, 889–898. [Google Scholar] [CrossRef] [PubMed]
- Hai, Q.; Lee, J.; Lin, J. Wavelet Filter-based Weak Signature Detection Method and its Application on Roller Bearing Prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar]
- Yu, J. Local and nonlocal preserving projection for bearing defect classification and performance assessment. IEEE Trans. Ind. Eelectron. 2012, 59, 2363–2376. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature 1 | Feature 2 | Feature 3 | Feature 4 | Feature 5 | Feature 6 | Feature 7 | Feature 8 | State |
|---|---|---|---|---|---|---|---|---|
| 0.089374 | 0.047321 | 0.100898 | 1.958858 | 1.606291 | 1.813402 | 0.10817 | 6.301499 | 1 |
| 0.1036 | 0.04787 | 0.113916 | 1.665516 | 1.419555 | 1.560898 | 0.133881 | 11.49973 | 1 |
| 0.095195 | 0.046492 | 0.105729 | 1.817757 | 1.529219 | 1.698434 | 0.038316 | 8.864674 | 1 |
| 0.101547 | 0.047333 | 0.111828 | 1.703315 | 1.449659 | 1.596429 | 0.159635 | 10.19821 | 1 |
| 0.087449 | 0.047526 | 0.099293 | 1.996853 | 1.625361 | 1.84549 | 0.066327 | 6.246746 | 1 |
| 0.100355 | 0.046046 | 0.110214 | 1.708943 | 1.463397 | 1.607167 | 0.071301 | 10.474 | 1 |
| 0.097557 | 0.045718 | 0.107536 | 1.760794 | 1.500416 | 1.653888 | 0.157312 | 8.822157 | 1 |
| 0.088979 | 0.046411 | 0.100132 | 1.941436 | 1.603238 | 1.804188 | 0.037097 | 6.599557 | 1 |
| 0.103291 | 0.046228 | 0.112967 | 1.648921 | 1.420006 | 1.553027 | 0.116062 | 11.54525 | 1 |
| 0.091338 | 0.044016 | 0.101192 | 1.841057 | 1.559724 | 1.727983 | 0.124147 | 6.76533 | 1 |
| 0.114011 | 0.012182 | 0.114646 | 1.161855 | 1.152177 | 1.158599 | 0.102057 | 17.33023 | 2 |
| 0.114794 | 0.013028 | 0.115515 | 1.162091 | 1.151164 | 1.158401 | 0.132316 | 17.42503 | 2 |
| 0.11468 | 0.014126 | 0.115529 | 1.185616 | 1.172517 | 1.181195 | 0.097094 | 17.81285 | 2 |
| 0.114637 | 0.015178 | 0.115617 | 1.185164 | 1.170044 | 1.180042 | 0.125409 | 17.41817 | 2 |
| 0.114804 | 0.015979 | 0.115888 | 1.197769 | 1.180885 | 1.192032 | 0.116505 | 17.63886 | 2 |
| 0.113608 | 0.016515 | 0.114778 | 1.219157 | 1.200454 | 1.21281 | 0.099188 | 17.11847 | 2 |
| 0.11486 | 0.017319 | 0.116131 | 1.217056 | 1.196951 | 1.210202 | 0.137996 | 17.39344 | 2 |
| 0.113765 | 0.018268 | 0.115192 | 1.233035 | 1.210016 | 1.225195 | 0.091749 | 17.30835 | 2 |
| 0.113877 | 0.018827 | 0.11539 | 1.233015 | 1.208609 | 1.224676 | 0.126345 | 16.93885 | 2 |
| 0.114127 | 0.018397 | 0.115569 | 1.227595 | 1.204454 | 1.219682 | 0.1175 | 17.20449 | 2 |
| 0.002049 | 0.066937 | 0.066268 | 2.726322 | 1.851256 | 2.266006 | 0.001127 | 0.669745 | 3 |
| 0.004122 | 0.050691 | 0.05033 | 3.423602 | 2.139655 | 2.778715 | 0.107688 | 0.003864 | 3 |
| 0.00479 | 0.074184 | 0.073564 | 2.079078 | 1.654904 | 1.879734 | 0.048673 | 1.159074 | 3 |
| 0.008259 | 0.041219 | 0.041615 | 3.851942 | 2.399057 | 3.137867 | 0.099468 | 0.005723 | 3 |
| 0.002269 | 0.075672 | 0.074914 | 1.906661 | 1.55103 | 1.733169 | 0.060749 | 1.273057 | 3 |
| 0.015029 | 0.038022 | 0.040515 | 3.256373 | 2.091815 | 2.64823 | 0.031322 | 0.049579 | 3 |
| 0.00546 | 0.073968 | 0.073397 | 2.030281 | 1.623696 | 1.832346 | 0.001452 | 1.298614 | 3 |
| 0.009501 | 0.052639 | 0.052947 | 3.744457 | 2.227701 | 2.970326 | 0.014274 | 0.158361 | 3 |
| 0.007452 | 0.064623 | 0.064379 | 2.708752 | 1.917112 | 2.318829 | 0.084318 | 0.514988 | 3 |
| 0.002106 | 0.063102 | 0.062477 | 2.822905 | 1.894306 | 2.342631 | 0.001242 | 0.361359 | 3 |
| 0.114405 | 0.039467 | 0.120887 | 1.788677 | 1.637389 | 1.730164 | 0.15048 | 16.96202 | 4 |
| 0.116347 | 0.042593 | 0.123746 | 1.848408 | 1.67213 | 1.778463 | 0.149167 | 18.21358 | 4 |
| 0.109839 | 0.041349 | 0.117212 | 1.861561 | 1.67939 | 1.792125 | 0.120963 | 14.69025 | 4 |
| 0.116759 | 0.03221 | 0.121031 | 1.592266 | 1.506494 | 1.561613 | 0.182333 | 18.0051 | 4 |
| 0.115441 | 0.041217 | 0.122434 | 1.764115 | 1.604478 | 1.701672 | 0.152843 | 17.5869 | 4 |
| 0.112717 | 0.030918 | 0.116795 | 1.634773 | 1.546062 | 1.602 | 0.09182 | 16.66351 | 4 |
| 0.118077 | 0.033982 | 0.122771 | 1.740657 | 1.637494 | 1.702599 | 0.146755 | 19.34746 | 4 |
| 0.11363 | 0.032838 | 0.118185 | 1.703288 | 1.602074 | 1.666293 | 0.101843 | 17.10229 | 4 |
| 0.114089 | 0.032349 | 0.118495 | 1.530019 | 1.441842 | 1.497519 | 0.059789 | 17.91909 | 4 |
| 0.116349 | 0.032846 | 0.120804 | 1.725601 | 1.626705 | 1.688983 | 0.134462 | 18.36644 | 4 |
| Test Sample | Idea Output | Diagnosis Result | |||
|---|---|---|---|---|---|
| No. | y1y2y3y4 | y1 | y2 | y3 | y4 |
| 1 | 1 0 0 0 | 1.0096 | –0.0001 | –0.0125 | 0.0030 |
| 2 | 1 0 0 0 | 1.0025 | 0.0001 | 0.0041 | –0.0067 |
| 3 | 1 0 0 0 | 0.9799 | 0.0000 | 0.0225 | –0.0024 |
| 4 | 0 1 0 0 | 0.0027 | 0.9990 | –0.0118 | 0.0097 |
| 5 | 0 1 0 0 | 0.0004 | 1.0163 | –0.0546 | 0.0382 |
| 6 | 0 1 0 0 | 0.0081 | 1.0044 | –0.0011 | –0.0114 |
| 7 | 0 0 1 0 | 0.0025 | 0.0000 | 0.9972 | 0.0003 |
| 8 | 0 0 10 | 0.0010 | 0.0000 | 0.9983 | 0.0007 |
| 9 | 0 0 1 0 | 0.0036 | 0.000 | 1.0044 | –0.0009 |
| 10 | 0 0 0 1 | –0.0379 | –0.0099 | –0.0267 | 1.0751 |
| 11 | 0 0 0 1 | –0.0567 | –0.0150 | 0.0639 | 1.0751 |
| 12 | 0 0 0 1 | –0.0322 | –0.0012 | –0.0508 | 1.0844 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Yao, B.; Peng, Z.; Guan, Y. Fault Diagnosis of Roller Bearings Based on a Wavelet Neural Network and Manifold Learning. Appl. Sci. 2017, 7, 158. https://doi.org/10.3390/app7020158
Wu L, Yao B, Peng Z, Guan Y. Fault Diagnosis of Roller Bearings Based on a Wavelet Neural Network and Manifold Learning. Applied Sciences. 2017; 7(2):158. https://doi.org/10.3390/app7020158
Chicago/Turabian StyleWu, Lifeng, Beibei Yao, Zhen Peng, and Yong Guan. 2017. "Fault Diagnosis of Roller Bearings Based on a Wavelet Neural Network and Manifold Learning" Applied Sciences 7, no. 2: 158. https://doi.org/10.3390/app7020158
APA StyleWu, L., Yao, B., Peng, Z., & Guan, Y. (2017). Fault Diagnosis of Roller Bearings Based on a Wavelet Neural Network and Manifold Learning. Applied Sciences, 7(2), 158. https://doi.org/10.3390/app7020158