2.3. Variation in Damping
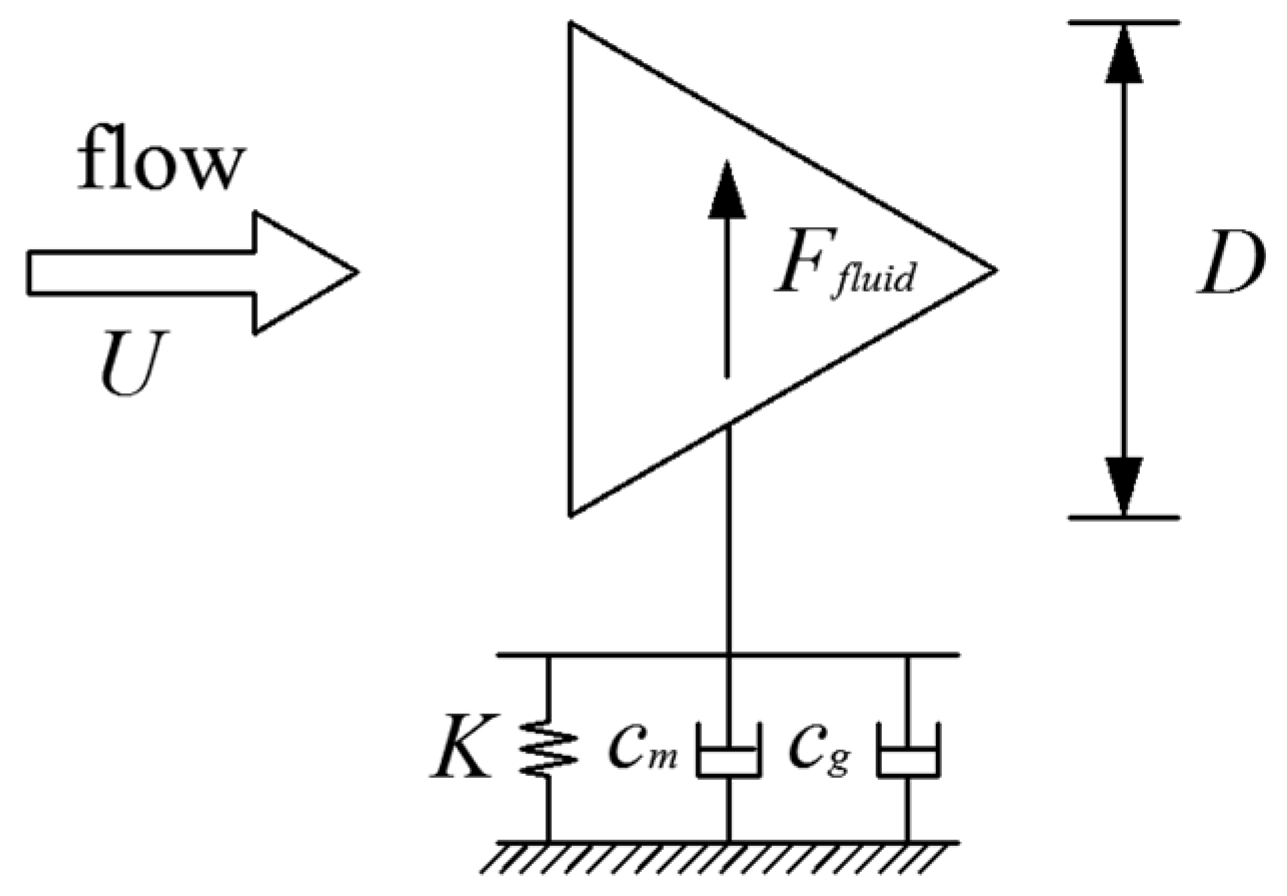
When a spring-mounted triangular prism is acted by the vertical flow force
Ffluid, the motion of the prism in the vertical-direction can be expressed as
where
m,
c and
K are the mass, the damping coefficient, and the stiffness of the oscillation system, respectively.
,
and
y are the acceleration, the velocity, and the displacement of the prism, respectively.
is the unit normal vector in the transverse direction. Generally,
Ffluid can be decomposed into viscous and inviscid components [
29].
In this paper, the variation in damping coefficient is implemented by adjusting the load resistance
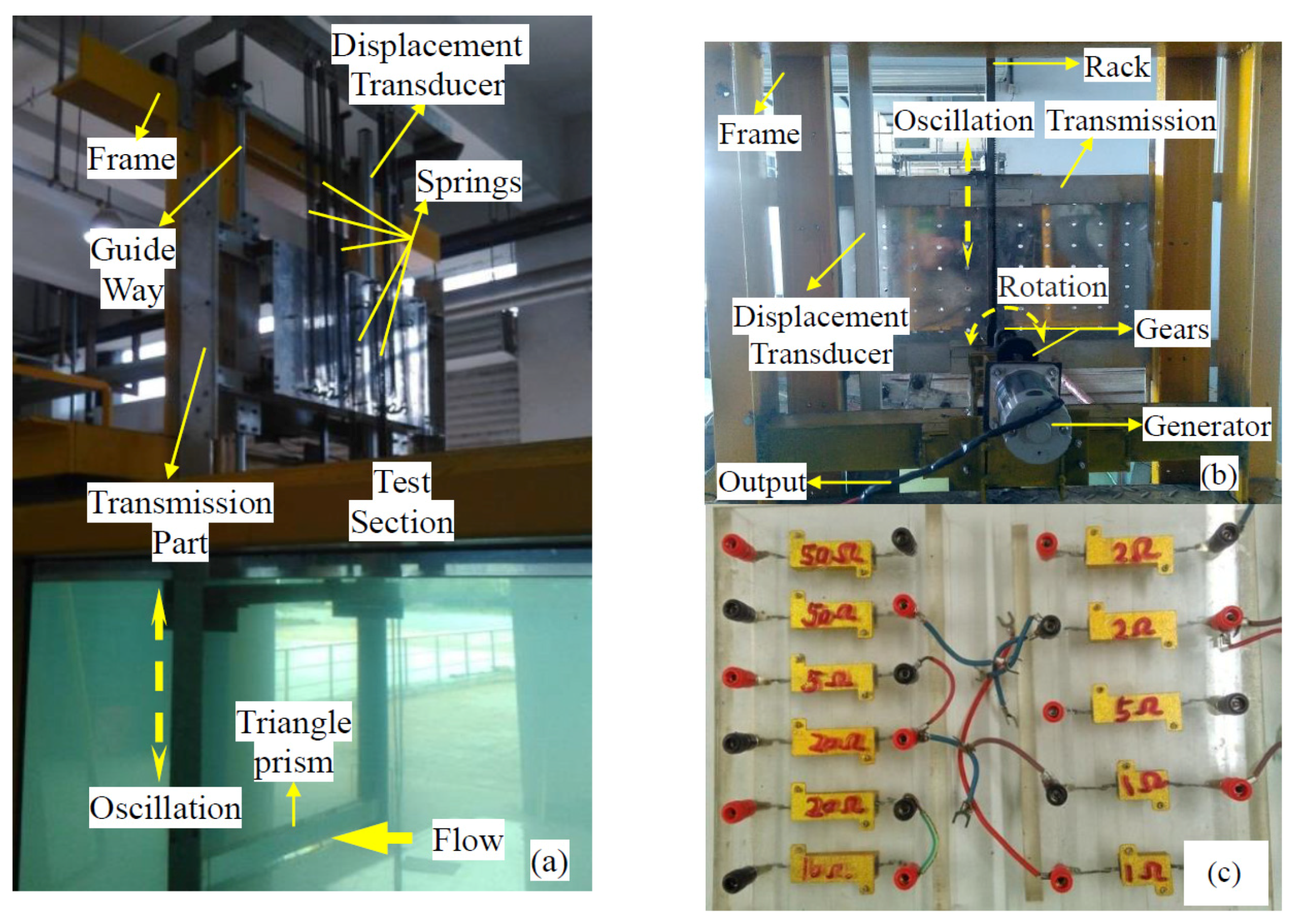
RL in the power take-off system (PTO). The PTO has been introduced by Zhang [
28]. The components of the PTO and the load resistance are illustrated in
Figure 3b,c.
In the PTO system, the rack is fixed on the transmission, and meshes with gear group to convert the linear oscillatory mechanical motion of the prism in FIM to a rotational oscillatory motion of gear. In addition, the gear group meshes with the gear of the generator to drive the rotor to rotate. When a generator runs, the wire loop, which is cutting across the magnetic induction lines, yields an induction current, resulting in an electromotive force that always resists the motion of the oscillator. As the magnitude of the electromagnetic force depends on the rotational motion of the rotor, which is related to the motion of the prism, the electromagnetic force can be regarded as part of the system damping force. In summary, the motion of the spring-mounted triangular prism with PTO can be simplified as in
Figure 4.
The system damping coefficient
c, which is the sum of mechanical damping coefficient
cm and the electromagnetic damping coefficient
ce, can be expressed as the following equation.
The mechanical damping coefficient
cm is dependent on the mechanical friction in the gears, the PTO system and linear bearings. The electromagnetic damping coefficient
ce, which includes the generator damping coefficient
cgen and harness damping coefficient
charn, is dependent on the generator internal resistance
R0 and the external load resistance
RL. The expression of
ce can be written as
where
B is the magnetic flux density, and
l is the length of the wire cutting the magnetic field perpendicularly to the field lines. β is the speed ratio of gear group, which is associated with the radius of the gears and rotor.
In order to simplify the following analysis, two dimensionless parameters are introduced for the first time in this paper: the load resistance ratio and the short circuit equivalent damping coefficient .
is the ratio of external load resistance
RL to the inner resistance of the generator
R0, which can be expressed as
is the ratio of system damping coefficient
c at the short circuit (S/C) case to the mechanical damping coefficient
cm , which can be expressed as
Substituting Equations (3)–(5) into Equation (2), the simplified equation of the system damping coefficient
c can be obtained as
As shown in Equation (6), in the oscillation system with PTO, the system damping coefficient c is a function of parameters cm, and . cm and are related to the system itself and can be regarded as the internal factors. is impacted by the external load resistance and can be regarded as the external factor. In the present experiment, PTO is based on a fixed-magnetic generator, cm and consequently maintain constants. Therefore, c is just a function of , illustrating that the variation in c can be achieved by adjusting .
Furthermore, the radius and the rotational inertia of the gears and rotor in PTO system have a great influence on the mass of the oscillation system. Zhang [
28] has proved that this impact can be considered as an equivalent mass
. Hence, the mass of oscillation system can be expressed as
where
is the original mass of the oscillation system, which is the sum of prism mass
, mass of transmission
, and one-third of the spring mass
[
23].
The physical parameters were verified by free-decay tests prior to the experiments. All the damping tests were performed in air at K = 1200 N/m and mo = 16.622 kg. The average measured value of inner resistance of the generator R0 is 3.3 Ω.
In the test process, every configuration was repeated four times to guarantee the accuracy of results. The final results were determined using a simple averaging method. According to the measured displacements, the system damping ratio ζ could be calculated using the logarithmic decrement method:
where
Ai denotes the amplitude in the
ith peak of displacement.
Additionally, the natural frequencies
fn were extracted from the time histories of the displacements using FFT (Fast Fourier Transformation). Since the prisms are immersed in air, the added mass can be negligible due to the low density and the viscosity of air. The mass of oscillation system can be calculated by the following expression.
The damping coefficient
c of the oscillation system can be calculated by the following expression.
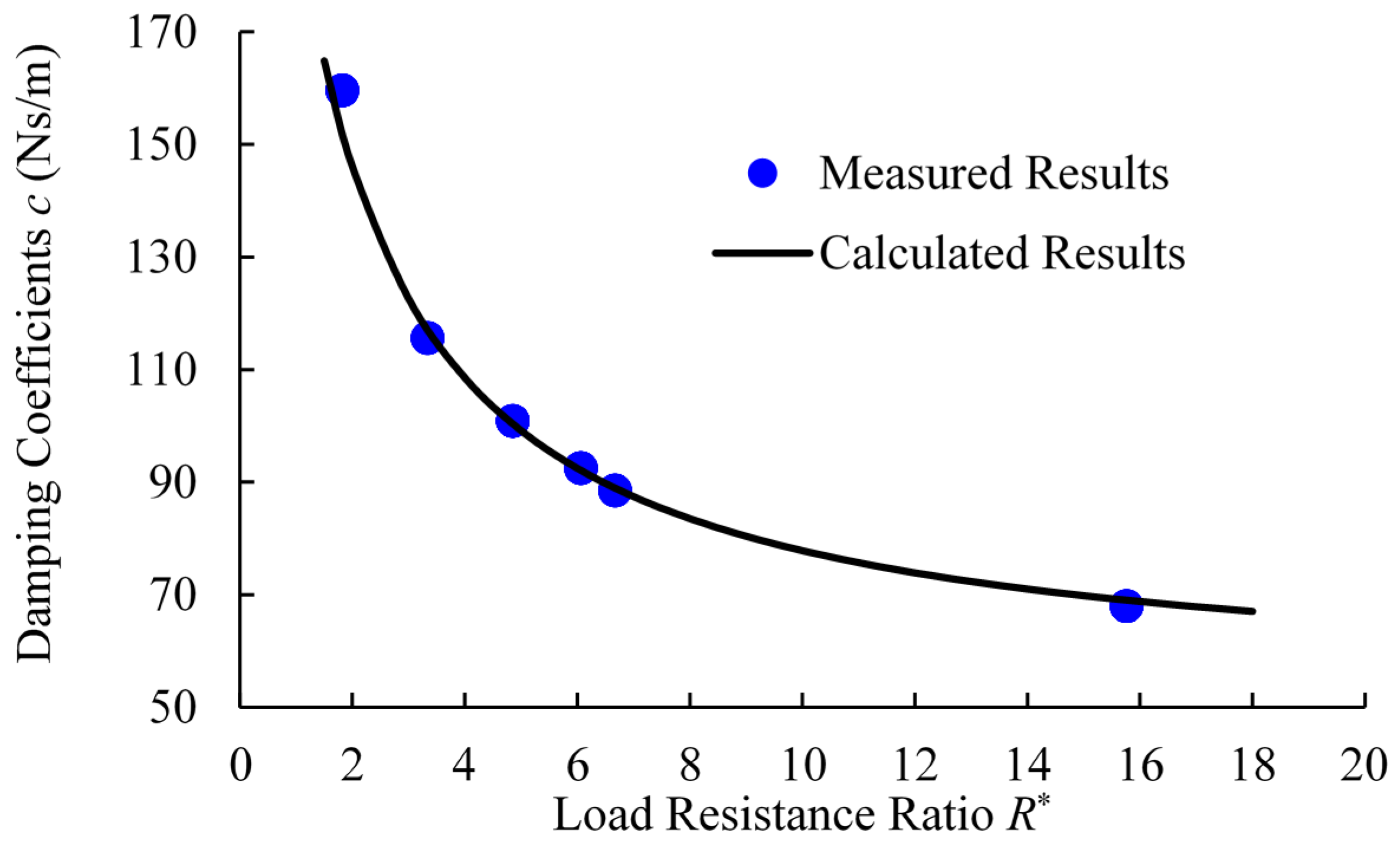
The results of free-decay tests are listed in
Table 1 and
Figure 5. In the table, the external load resistance
RL, the damping ratio ζ, and the natural frequency
fn are measured; the load resistance ratio
R*, mass of the oscillation system
m, damping coefficient
c, and the short-circuit equivalent damping coefficient
are calculated using the measured data.
As shown in
Table 1,
m and
remain approximately constant when
R* varies from 6 to 52 Ω. The average of
m is 32.90 kg, and the average of
is 6.393. The mechanical damping ratio ζ
m can be obtained at the open circuit (O/C) case where
R* goes to infinity. The value of ζ
m is 0.132, which is also presented in
Table 1. Then the mechanical damping coefficient
cm can be calculated as 52.22 N·s·m
−1. The trends of
c versus
R* based on the test results and calculated results are plotted in
Figure 5. The calculated results are obtained by Equation (6). The two curves agree very well.
The above results from the free-decay tests indicate that using the PTO to control the damping coefficient is reasonable.
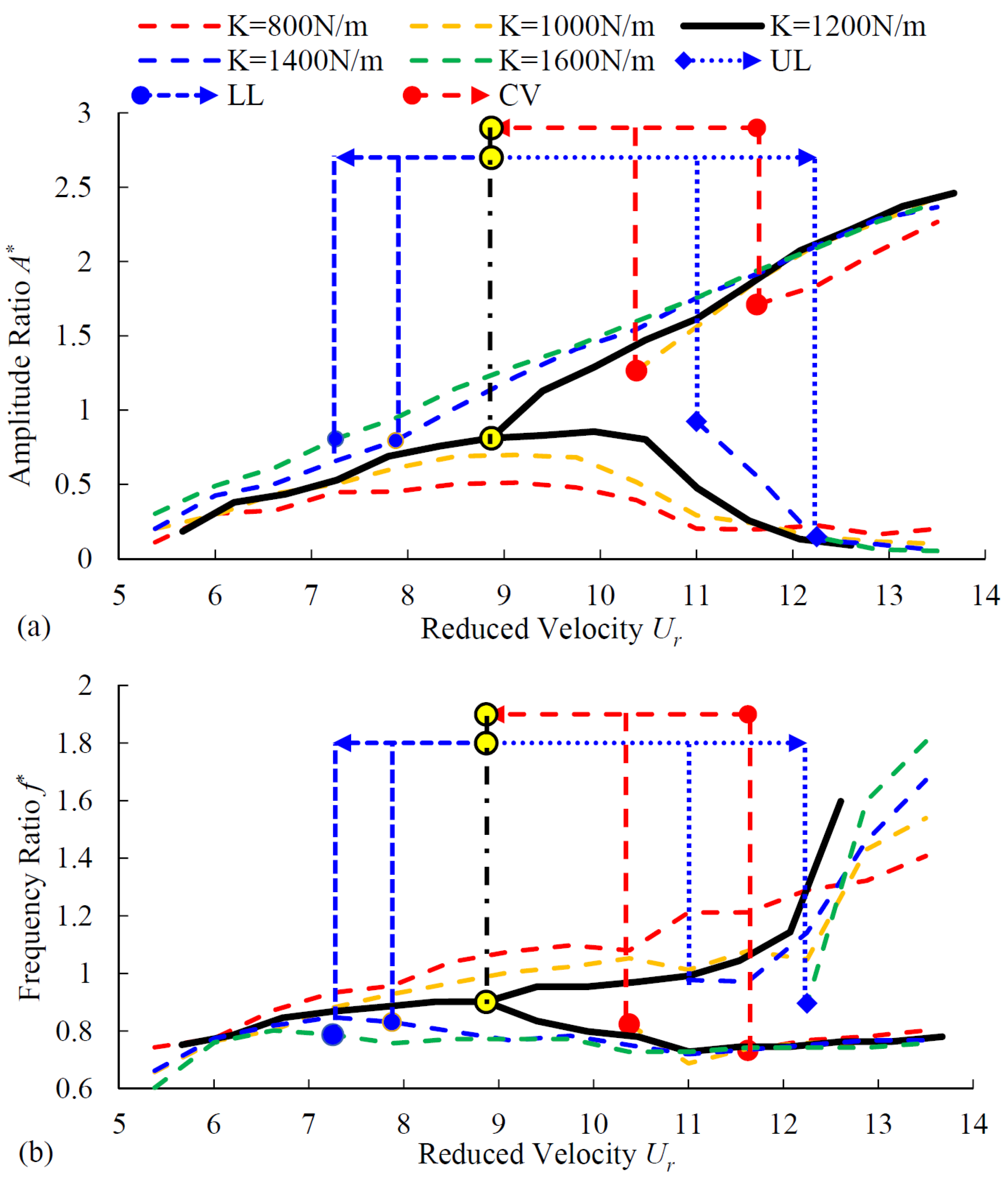
2.4. Variation in Stiffness
In most of the previous studies [
5,
6,
7], the variation in system stiffness is achieved by adjusting physical springs. But the change of springs has a great impact on the equilibrium position of the prism immersed in water due to the buoyancy and gravity. In order to solve this problem, some scholars changed the layout of the direction of the cylinder, and some developed virtual system such as VCK (virtual damper-spring system) [
30,
31] to vary system stiffness.
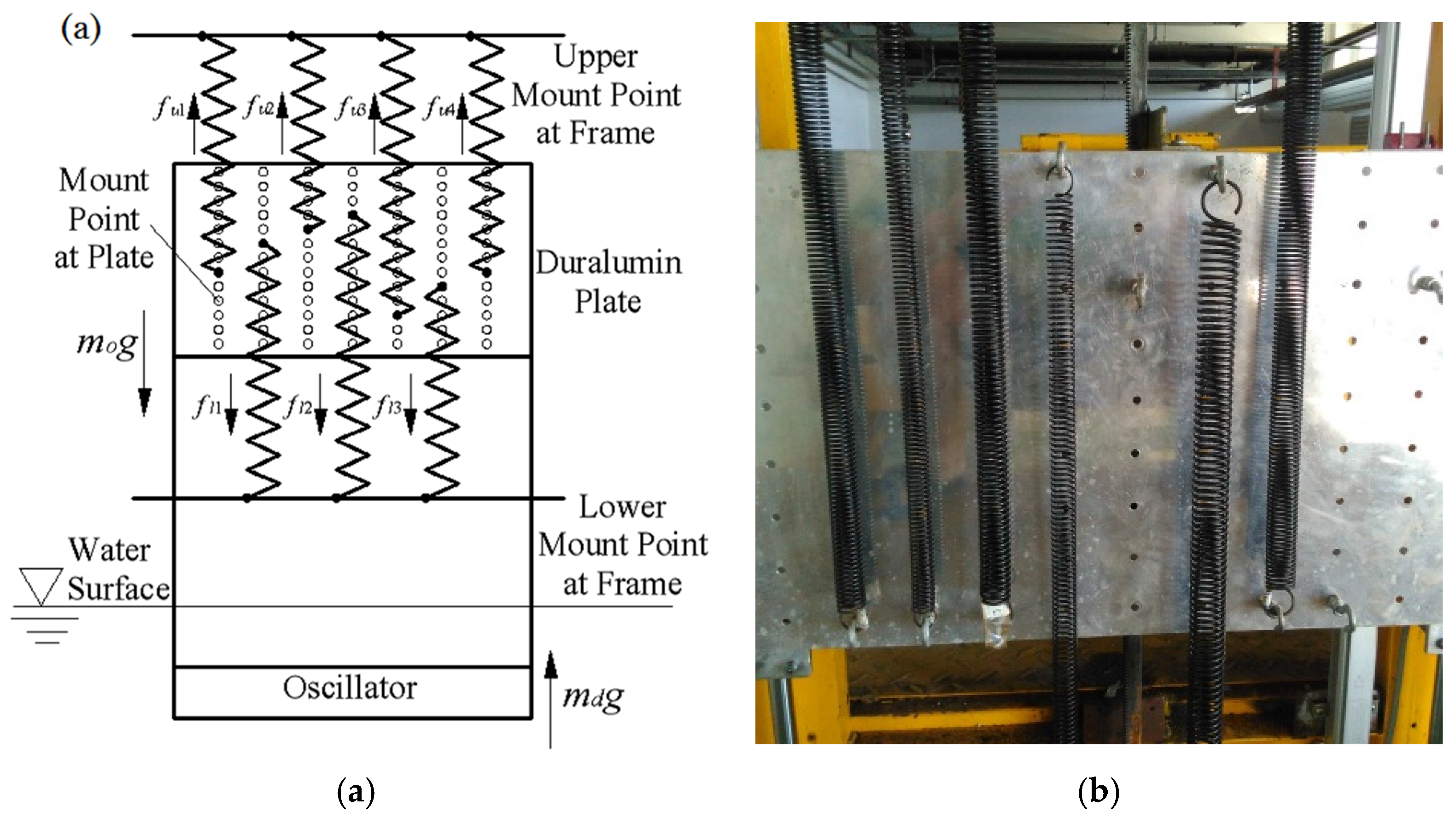
In the present investigation, a new spring system is established to solve the problem mentioned above. The components of the system are shown in
Figure 6. A duralumin plate is rigidly fixed on the transmission. Multiple columns with equally spaced mount points are arranged longitudinally on the duralumin plate. The corresponding mount points are also arranged at the upper section and lower section of the frame. The upper mount point, the mount points in the columns, and the lower mount point are in a vertical line. During the experiment, the upper side of the lower springs and the lower side of upper springs can be selected as the best mount point to suspend.
According to the linear superposition principle of spring stiffness, different system stiffnesses can be implemented by using different groups of springs. The stiffness of a spring group with
n springs is the sum of each spring stiffness
kspr,i. The requirements in the following expressions need to be satisfied by hanging the springs.
where
kui and
klj denote the stiffness of the
ith upper extensional spring and
jth the lower extensional spring, respectively. Δ
xui and Δ
xlj denote the extended lengths of the
ith upper extensional spring and
jth the lower extensional spring, respectively.
N and
M denote the total numbers of the upper extensional springs and the lower extensional springs.
md is the displaced mass of the prism [
23].
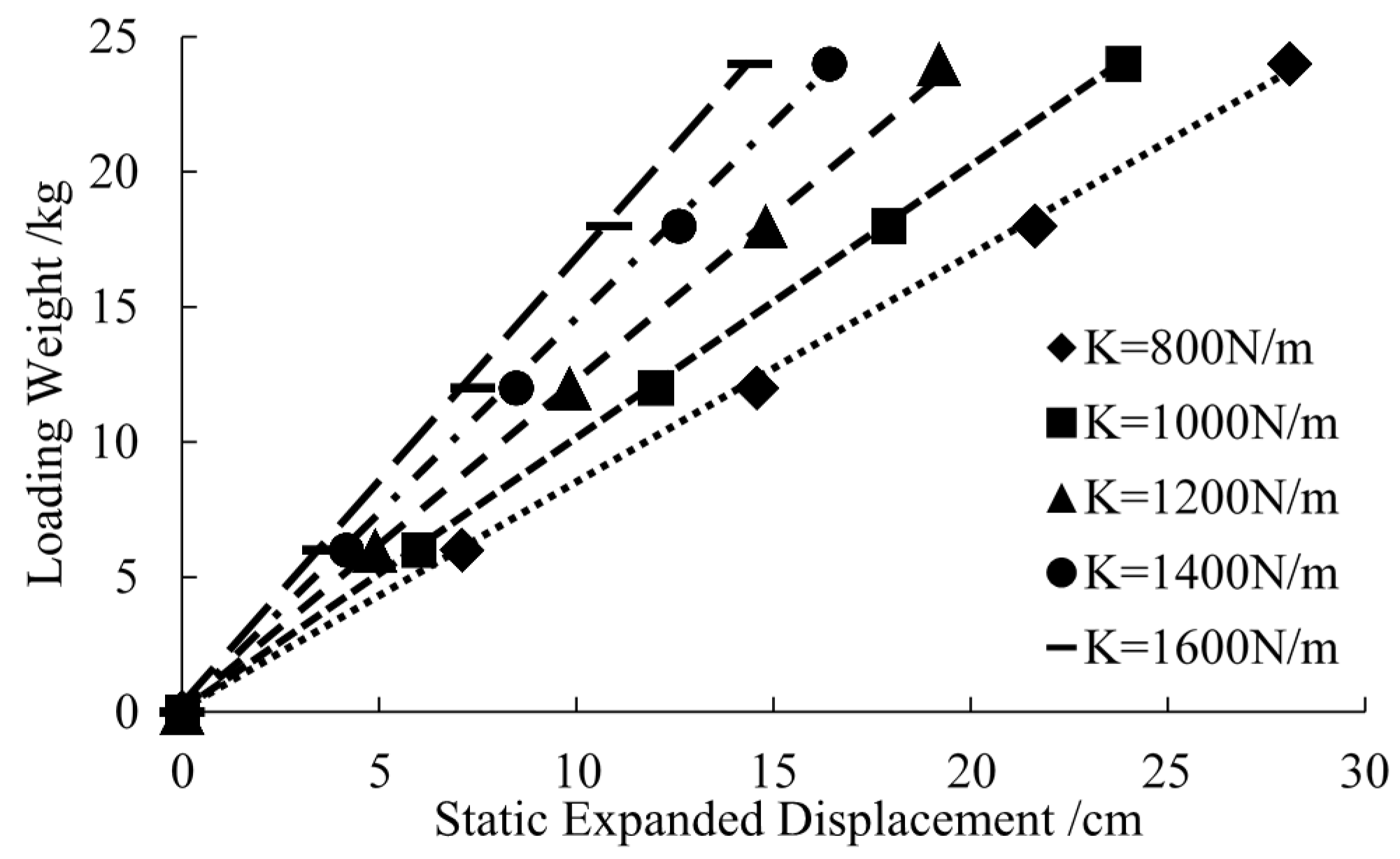
In order to ensure the accuracy of the spring system, the linearity of five spring groups were verified by loading different weights. The weight varied from 0 to 24 kg, and the variations of the loading weight versus the measured static expanded displacement in different configurations are depicted in
Figure 7. The relationships between the loading weight and static expanded displacement are obviously linear, indicating that the stiffness has a great linearity.
The mechanical damping ratios ζ
m, the mechanical damping coefficients
cm, the natural frequency of the oscillation system
fn, and the mass of oscillation
m are verified using the free-decay tests as well. All the tests were performed in air at the open circuit (O/C) configuration. The original mass
mo is 16.622 kg, and the test methods and the calculation of the corresponding parameters are all similar to the description in
Section 2.3. The results are listed in
Table 2. As the system stiffness
K varies from 800 to 1600 N/m, the mechanical damping ratio ζ
m decreases, the natural frequency
fn increases, while the mechanical damping coefficients
cm and the mass of oscillation system
m remain approximately constant. The averages of
cm and
m are 51.258 N·s·m
−1 and 32.90 kg, respectively. In summary, all the above results indicate that the variation in stiffness using the spring system is reasonable.
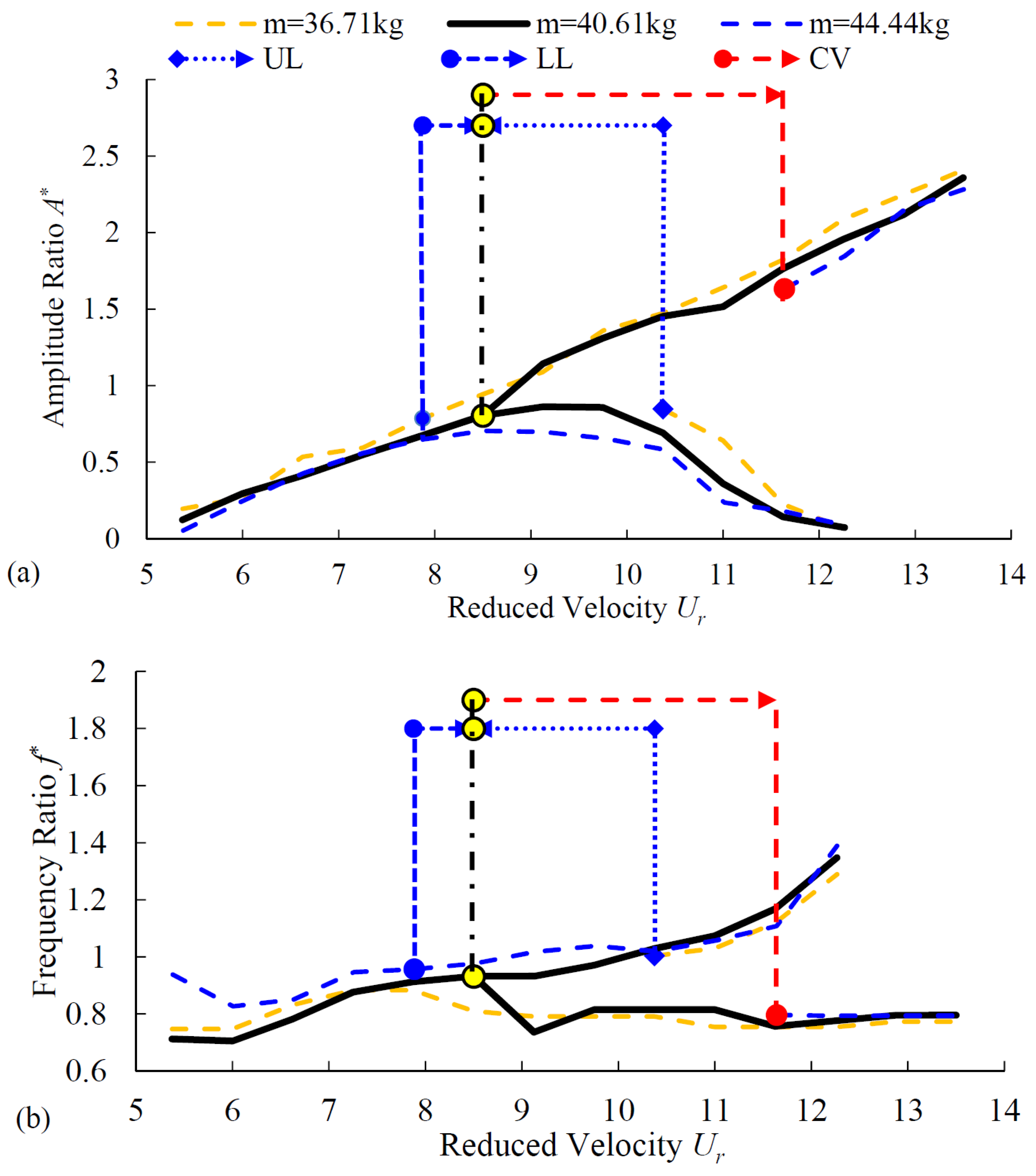
2.5. Variation in Mass
In the present experiments, the variation in mass is achieved by adding or subtracting additional weight. The material of the additional weight is high-density lead in order to reduce the space occupied by the weight. Moreover, the additional weight is fixed in the center of the transmission part by screws to keep balance of the oscillation system.
Just as in
Section 2.4, the mechanical damping ratios ζ
m, the mechanical damping coefficients
cm, the natural frequency of the oscillation system
fn, and the mass of the oscillation
m are verified using the free-decay tests. The test methods, test configurations and calculations of corresponding parameters are all the same as those in
Section 2.4. The results are listed in
Table 3, in which
mo-cal is the calculated original mass calculated by the following expression.
where,
madd is the mass of the additional weight illustrated in
Table 3.
In
Table 3, as the mass of the additional weight
madd varies from 0 to 11.73 kg, the mechanical damping ratio ζ
m and the natural frequency
fn both decrease, the mass of oscillation system
m increases, while the mechanical damping coefficients
cm and the calculated original mass
mo-cal remain approximately constant. The averages of
cm and
mo-cal are 52.485 N·s·m
−1 and 16.49 kg, respectively.
mo-cal is very close to
mo, which is measured as 16.622 kg.
The above results indicate that the variation in mass of oscillation using the additional weight is reasonable.
In this paper, the displaced mass
md of the regular triangular prism is 3.897 kg. The mass ratios can be obtained and the details are presented in
Table 3.
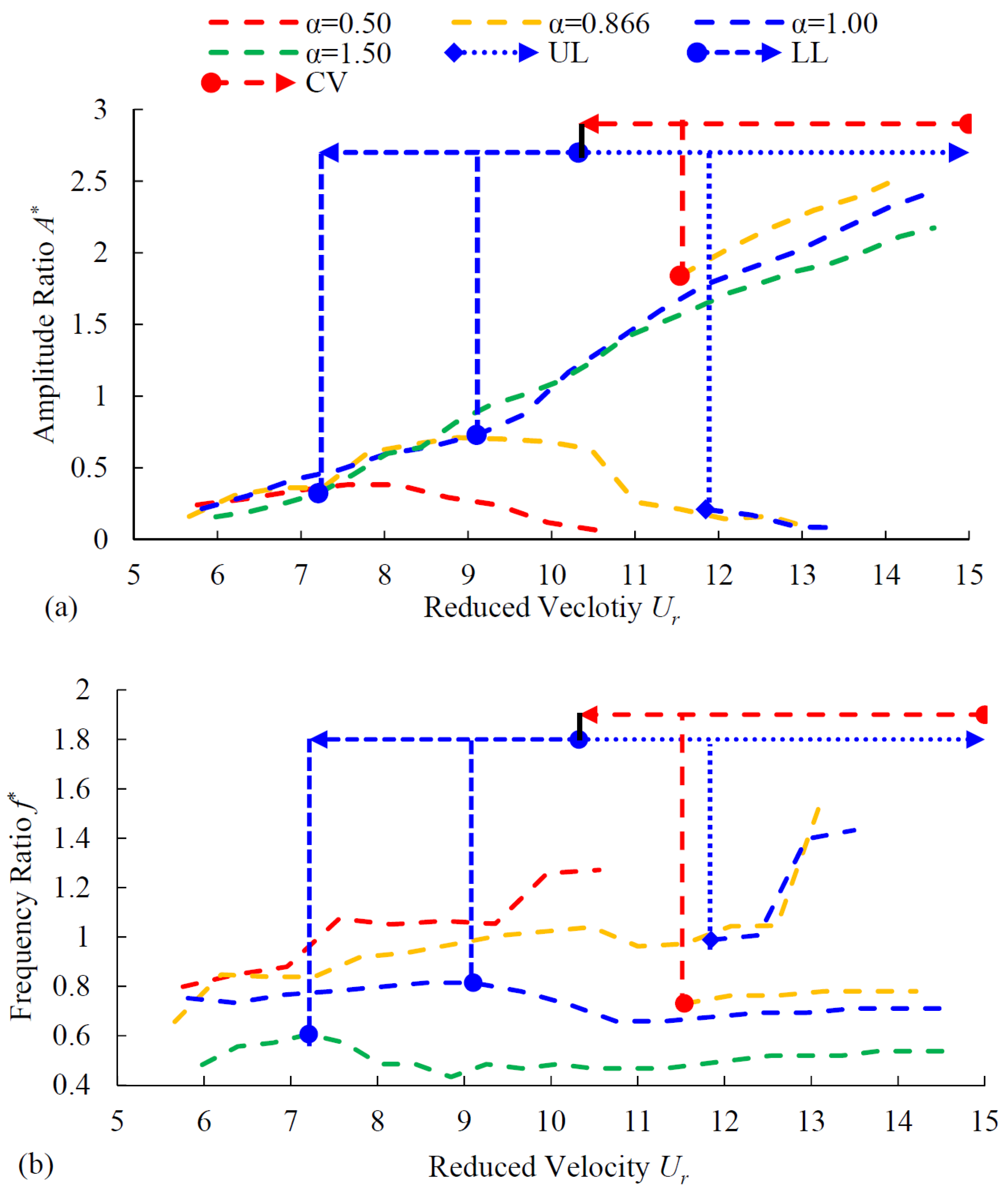
2.6. Triangular Prisms and Validation
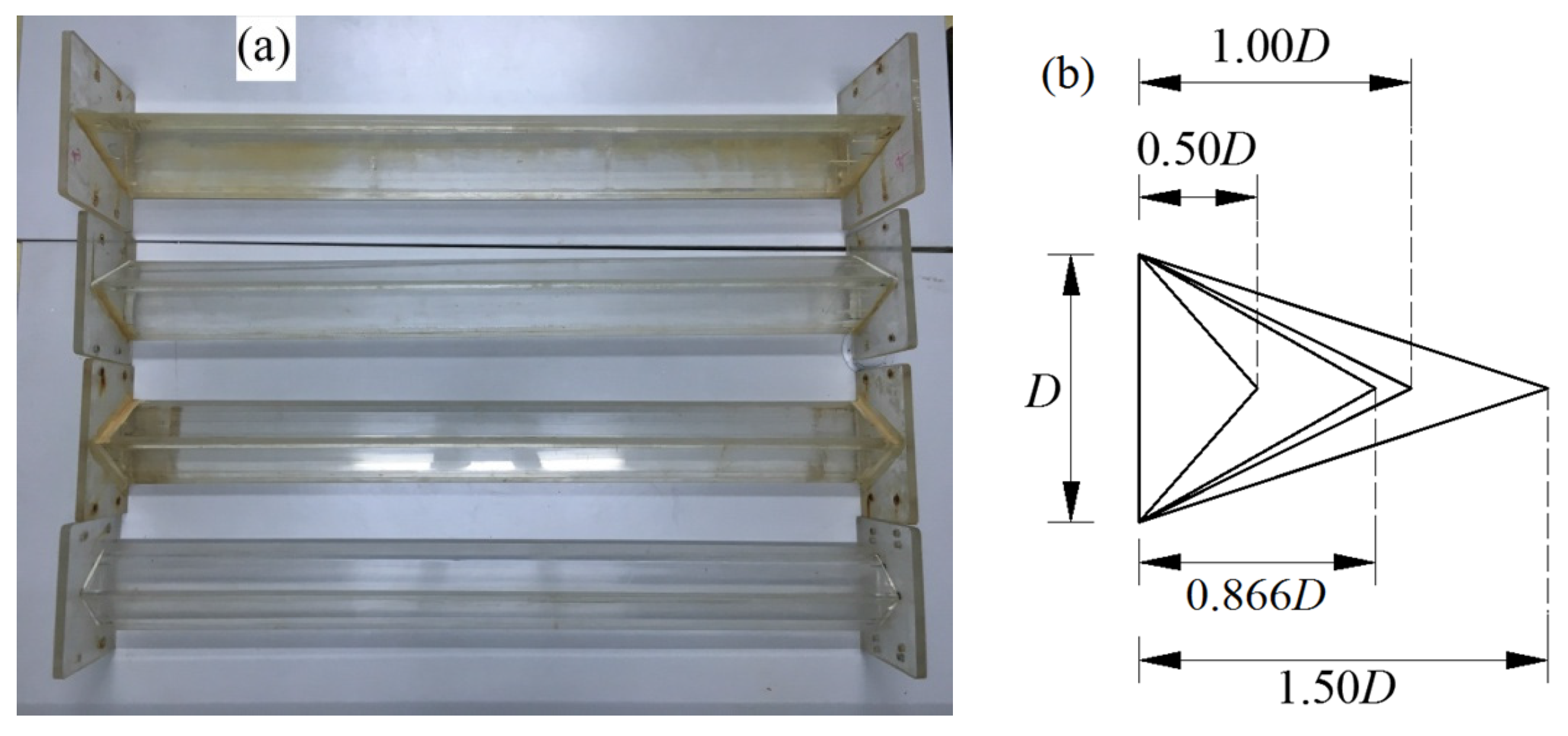
The experimental prisms are all isosceles triangular prisms made of 10 mm Plexiglas plate. The characteristic dimensions
D of the prisms are all 10 cm; the lengths
L are approximately 0.9 m. In order to reduce the boundary effects on the prisms, two end plates are attached on the two end sides of the prisms, and the gaps between the end plates and the walls of the channel are less than around 3 cm [
32,
33].
In this paper, the isosceles triangular prisms with different section aspect ratios α are investigated. The section aspect ratio α is the ratio of the height of the triangular cross-section to the length of the base.
Four triangular prisms with different section aspect ratios—0.5, 0.866, 1 and 1.5—are produced. When the aspect ratio is α = 0.866, the section of the prism is the regular triangular. The prisms and the variation of aspect ratios are shown in
Figure 8.
For triangular prisms, the incident angles strongly affect the responses because of the non-axis symmetry of the cross-section. This paper does not focus on the influence of incident angles of the oscillation, so only one incident angle, in which the base of the cross-section is vertical to the coming flow, is taken into account. Fully developed transverse galloping can be achieved at this incident angle when the flow velocity is high enough.
It should be noted that the differences in section aspect ratios may cause the differences in oscillation mass. In order to keep the same natural frequency fn for different prisms, additional weights are used to balance the differences in the prisms’ mass.
In the present experiment, we used the established oscillation system, which had been introduced by Zhang et al. [
28]. The details of validation had also been described in Zhang et al.’s research [
28].






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}