Overload Control in Smart Transformer-Fed Grid

 ,
,  ,
, 
Abstract
:1. Introduction
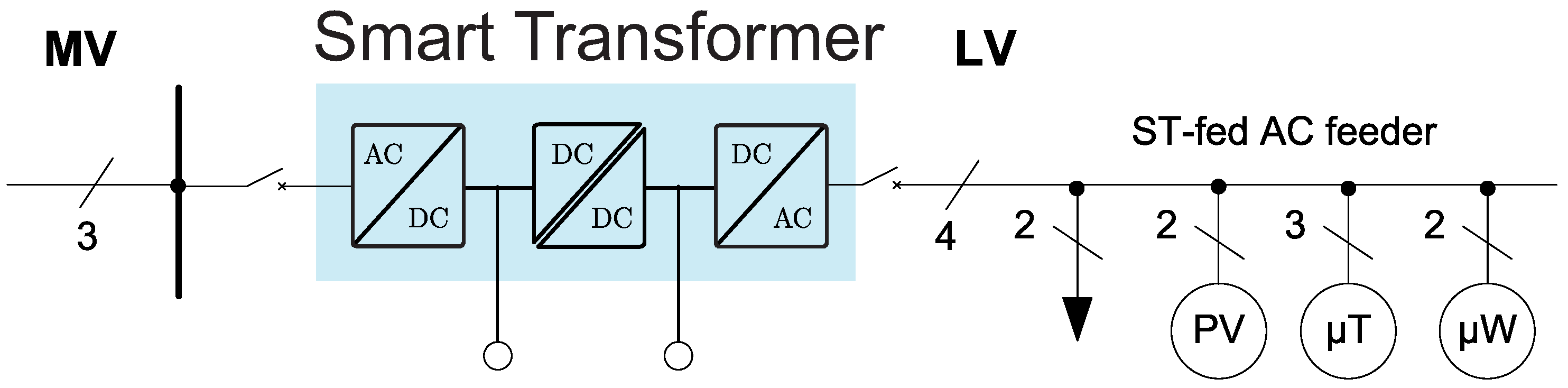
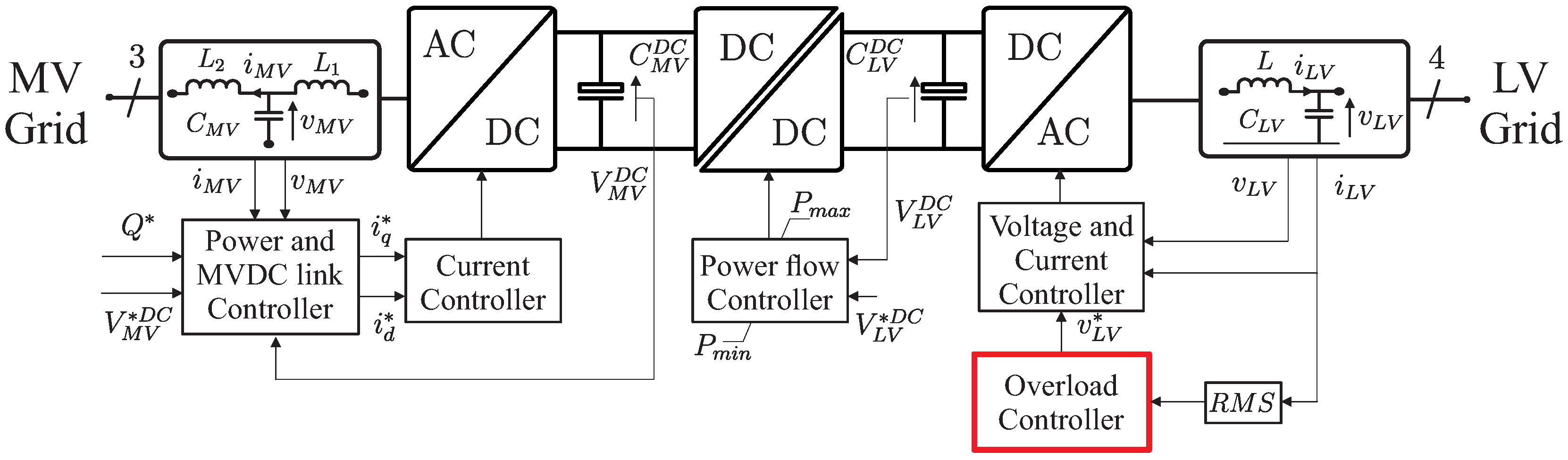
2. Smart Transformer Concept and Control
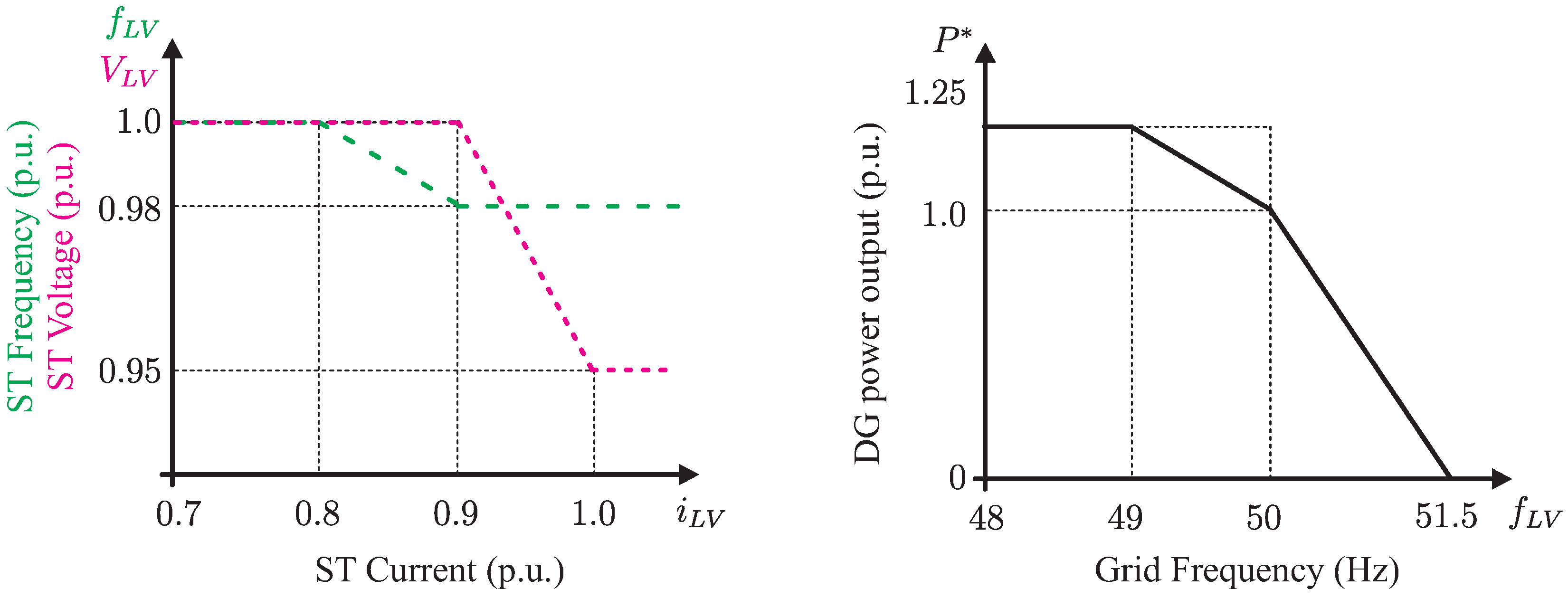
Smart Transformer Overload Controller
3. Grid under Test
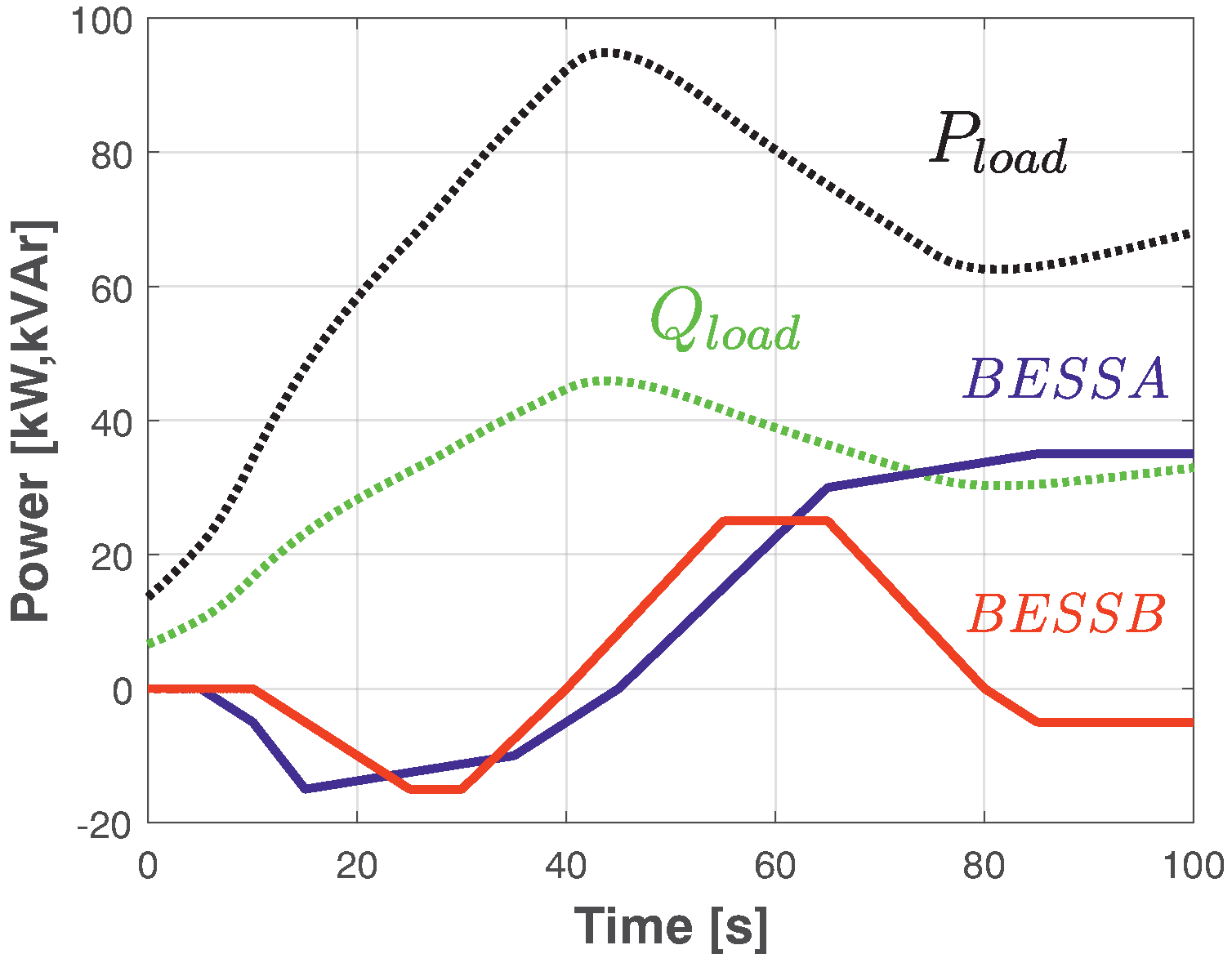
4. Simulation Results
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Liu, R.; Dow, L.; Liu, E. A survey of PEV impacts on electric utilities. In Proceedings of the 2011 IEEE PES Innovative Smart Grid Technologies (ISGT), Hilton Anaheim, CA, USA, 17–19 January 2011; pp. 1–8.
- Verzijlbergh, R.A.; Grond, M.O.W.; Lukszo, Z.; Slootweg, J.G.; Ilic, M.D. Network Impacts and Cost Savings of Controlled EV Charging. IEEE Trans. Smart Grid 2012, 3, 1203–1212. [Google Scholar] [CrossRef]
- Fu, W.; McCalley, J.D.; Vittal, V. Risk assessment for transformer loading. IEEE Trans. Power Syst. 2001, 16, 346–353. [Google Scholar] [CrossRef]
- Weekes, T.; Molinski, T.; Swift, G. Transient transformer overload ratings and protection. IEEE Electr. Insul. Mag. 2004, 20, 32–35. [Google Scholar] [CrossRef]
- Liserre, M.; Buticchi, G.; Andresen, M.; Carne, G.D.; Costa, L.F.; Zou, Z.X. The Smart Transformer: Impact on the Electric Grid and Technology Challenges. IEEE Ind. Electron. Mag. 2016, 10, 46–58. [Google Scholar] [CrossRef]
- De Carne, G.; Liserre, M.; Vournas, C. On-line load sensitivity identification in LV distribution grids. IEEE Trans. Power Syst. 2016. [Google Scholar] [CrossRef]
- De Carne, G.; Buticchi, G.; Liserre, M.; Vournas, C. Load Control using Sensitivity Identification by means of Smart Transformer. IEEE Trans. Smart Grid 2016. [Google Scholar] [CrossRef]
- Buticchi, G.; Carne, G.D.; Barater, D.; Zou, Z.; Liserre, M. Analysis of the Frequency-Based Control of a Master/Slave Micro-Grid. IET Renew. Power Gener. 2016, 10, 1570–1576. [Google Scholar] [CrossRef]
- Huang, A.Q. Medium-Voltage Solid-State Transformer: Technology for a Smarter and Resilient Grid. IEEE Ind. Electron. Mag. 2016, 10, 29–42. [Google Scholar] [CrossRef]
- Yu, X.; She, X.; Zhou, X.; Huang, A. Power Management for DC Microgrid Enabled by Solid-State Transformer. IEEE Trans. Smart Grid 2014, 5, 954–965. [Google Scholar] [CrossRef]
- Huang, S.; Pillai, J.; Liserre, M.; Bak-Jensen, B. Improving photovoltaic and electric vehicle penetration in distribution grids with smart transformer. In Proceedings of the 4th Innovative Smart Grid Technologies Europe (ISGT EUROPE), Lyngby, Denmark, 6–9 October 2013; pp. 1–5.
- Carr, J.; Wang, Z.; Bhattacharya, S.; Hatua, K.; Madhusoodhanan, S. Overloading and overvoltage evaluation of a Transformerless Intelligent Power Substation. In Proceedings of the 2013 IEEE Power Energy Society General Meeting, Vancouver, BC, Canada, 21–25 July 2013; pp. 1–5.
- De Carne, G.; Buticchi, G.; Liserre, M.; Marinakis, P.; Vournas, C. Coordinated Frequency and Voltage Overload Control of Smart Transformers. In Proceedings of the IEEE PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015.
- De Carne, G.; Buticchi, G.; Liserre, M.; Vournas, C. Frequency-Based Overload Control of Smart Transformers. In Proceedings of the IEEE PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015.
- Schneider, K.P.; Fuller, J.; Tuffner, F.; Singh, R. Evaluation of Conservation Voltage Reduction (CVR) on a National Level; Technical Report; Pacific Northwest National Laboratory: Oak Ridge, TN, USA, 2010.
- Wang, Z.; Wang, J. Review on Implementation and Assessment of Conservation Voltage Reduction. IEEE Trans. Power Syst. 2014, 29, 1306–1315. [Google Scholar] [CrossRef]
- Vandoorn, T.L.; Kooning, J.D.; Meersman, B.; Guerrero, J.M.; Vandevelde, L. Voltage-Based Control of a Smart Transformer in a Microgrid. IEEE Trans. Ind. Electron. 2013, 60, 1291–1305. [Google Scholar] [CrossRef] [Green Version]
- Guillod, T.; Krismer, F.; Kolar, J. Protection of MV Converters in the Grid: The Case of MV/LV Solid-State Transformers. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 5, 393–408. [Google Scholar] [CrossRef]
- Tatcho, P.; Li, H.; Jiang, Y.; Qi, L. A Novel Hierarchical Section Protection Based on the Solid State Transformer for the Future Renewable Electric Energy Delivery and Management (FREEDM) System. IEEE Trans. Smart Grid 2013, 4, 1096–1104. [Google Scholar] [CrossRef]
- She, X.; Huang, A.; Burgos, R. Review of Solid-State Transformer Technologies and Their Application in Power Distribution Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 186–198. [Google Scholar] [CrossRef]
- She, X.; Huang, A.Q.; Lukic, S.; Baran, M.E. On Integration of Solid-State Transformer with Zonal DC Microgrid. IEEE Trans. Smart Grid 2012, 3, 975–985. [Google Scholar] [CrossRef]
- Comitato Elettrotecnico Italiano (CEI). Reference Technical Rules for the Connection of Active and Passive Users to the LV Electrical Utilities; CEI: Milano, Italy, 2012. [Google Scholar]
- CIGRE. Benchmark System for Network Integration of Renewable and Distributed Energy Resources C06.04.02; Technical Report; CIGRE: Paris, France, 2014. [Google Scholar]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; Wiley: Hoboken, NJ, USA, 2011. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Load | Bus | Nominal Power (kW) | cos φ | ST Parameter | Value |
|---|---|---|---|---|---|
| L1 | 11 | 20.0 | 0.90 | 120 kVA | |
| L2 | 15 | 10.0 | 0.90 | 800 V | |
| L3 | 16 | 10.0 | 0.90 | mF | |
| L4 | 17 | 25.0 | 0.90 | mH | |
| L5 | 18 | 15.0 | 0.90 | F |
| Resource | Nominal Power (kVA) |
|---|---|
| BESS A | 35 |
| BESS B | 25 |
| PV A | 4 |
| PV B | 3 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 650 V | 650 V | ||
| mF | mH | ||
| 10 F | 220 | ||
| 10 kHz | 6 A |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Carne, G.; Zou, Z.; Buticchi, G.; Liserre, M.; Vournas, C. Overload Control in Smart Transformer-Fed Grid. Appl. Sci. 2017, 7, 208. https://doi.org/10.3390/app7020208
De Carne G, Zou Z, Buticchi G, Liserre M, Vournas C. Overload Control in Smart Transformer-Fed Grid. Applied Sciences. 2017; 7(2):208. https://doi.org/10.3390/app7020208
Chicago/Turabian StyleDe Carne, Giovanni, Zhixiang Zou, Giampaolo Buticchi, Marco Liserre, and Costas Vournas. 2017. "Overload Control in Smart Transformer-Fed Grid" Applied Sciences 7, no. 2: 208. https://doi.org/10.3390/app7020208
APA StyleDe Carne, G., Zou, Z., Buticchi, G., Liserre, M., & Vournas, C. (2017). Overload Control in Smart Transformer-Fed Grid. Applied Sciences, 7(2), 208. https://doi.org/10.3390/app7020208