
Application of a High-Power Reversible Converter in a Hybrid Traction Power Supply System

Abstract
:1. Introduction
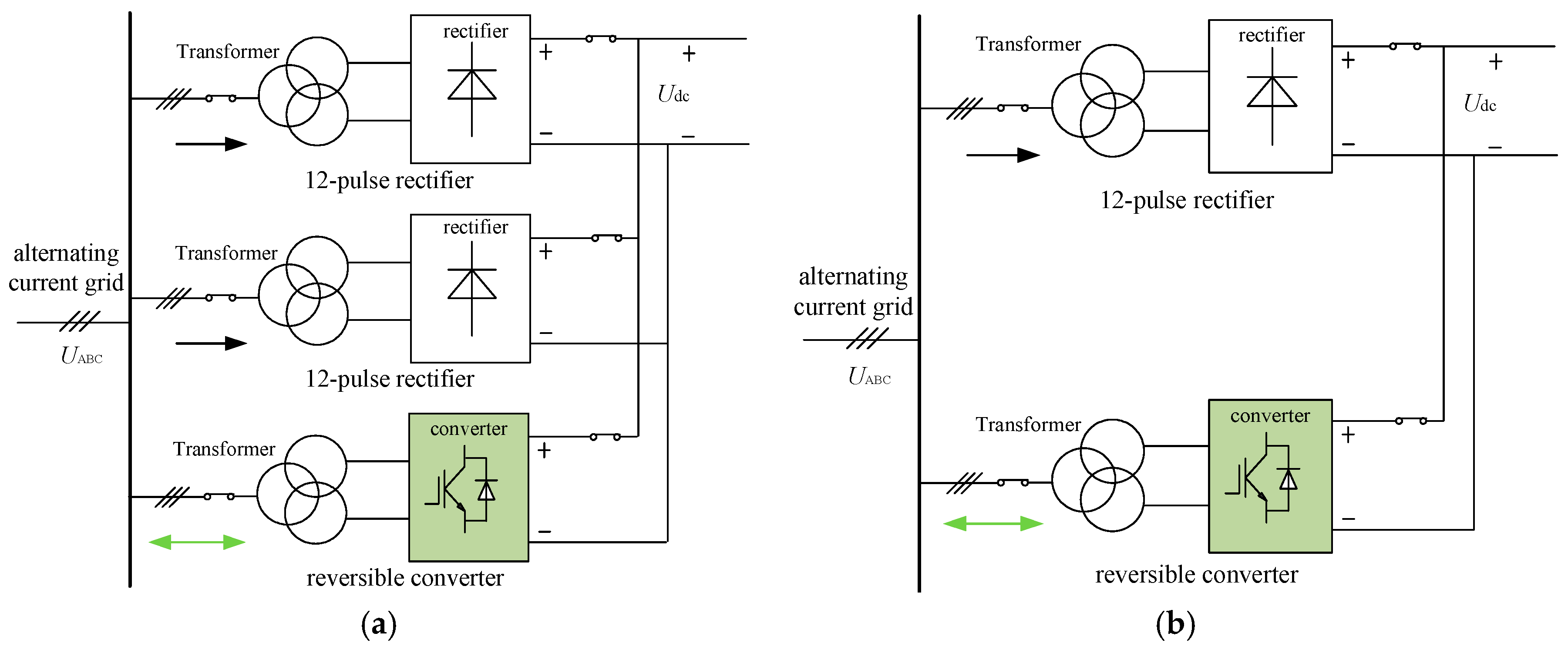
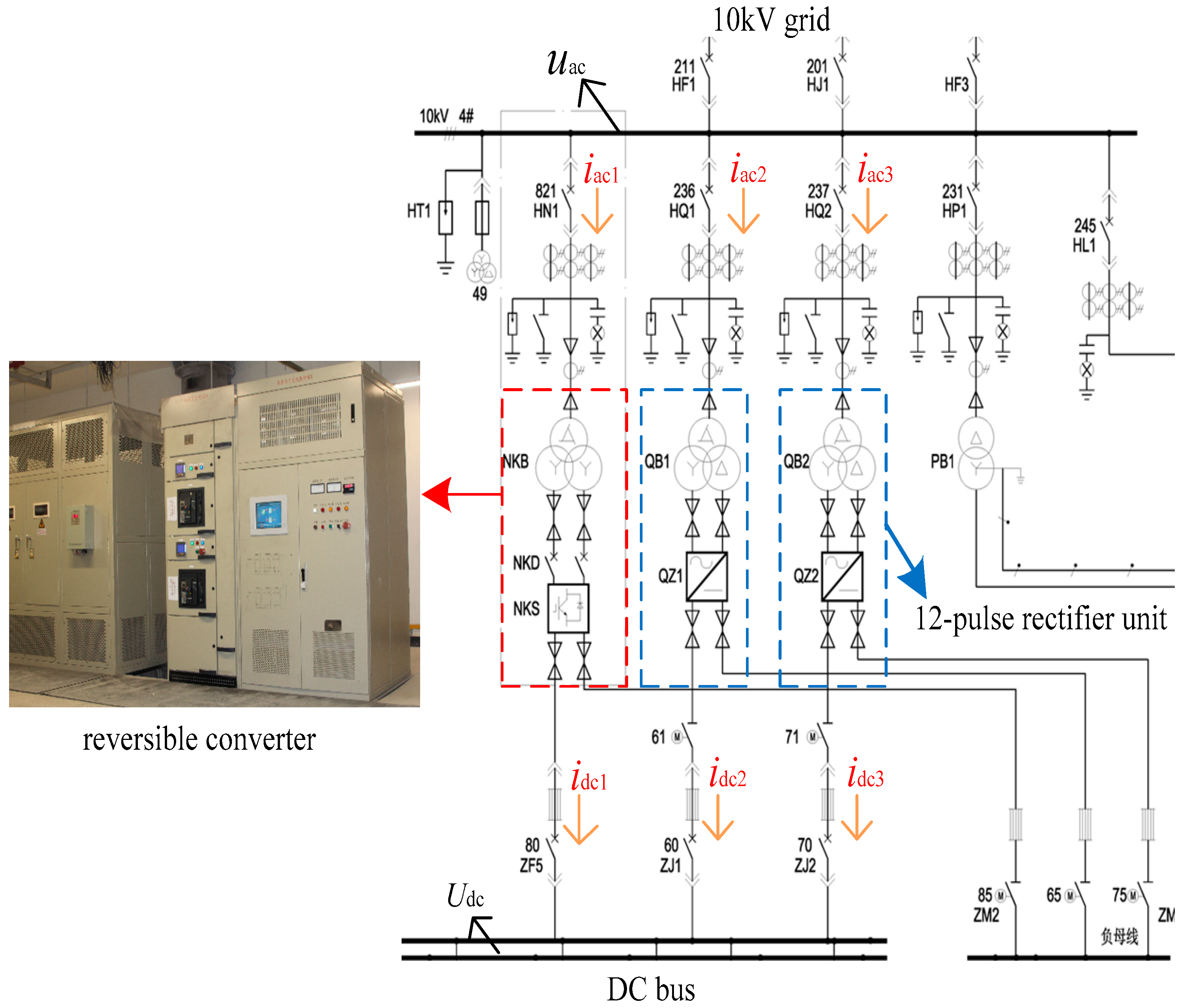
2. Proposed Hybrid Traction Power Supply Scheme
3. Coordinated Control Strategy
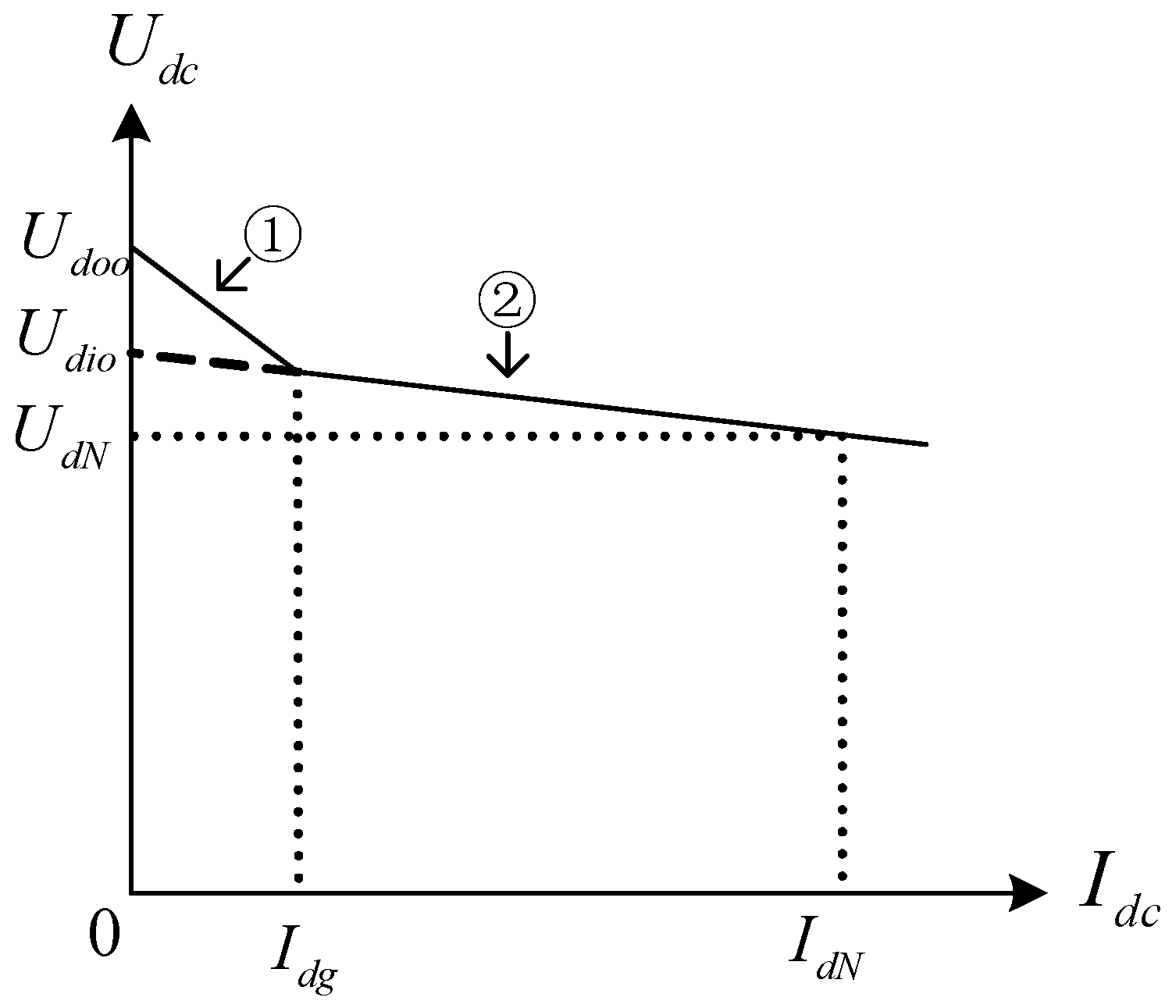
3.1. Direct Current (DC) Output Characteristics of the 12-Pulse Rectifier
3.1.1. Curve ①
3.1.2. Curve ②
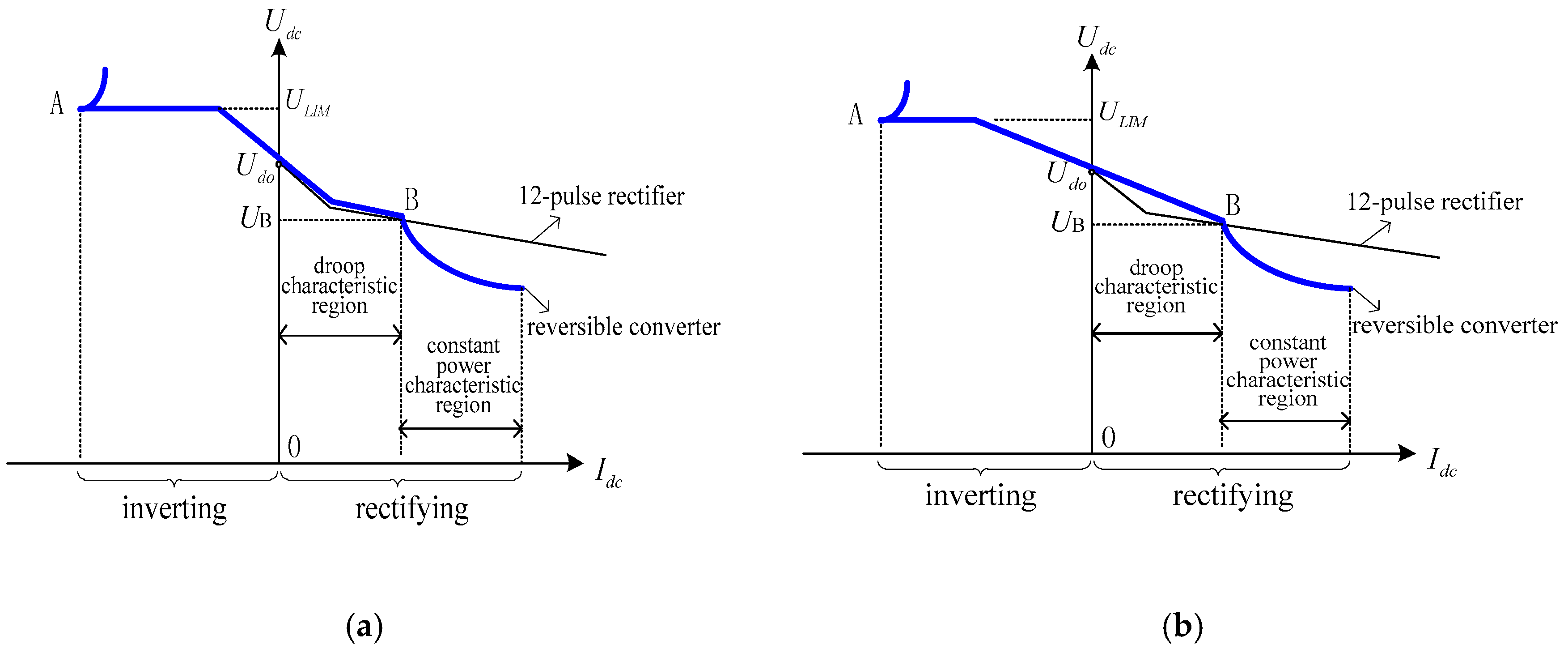
3.2. DC Output Characteristic of the Reversible Converter
3.3. Coordinated Control Strategy
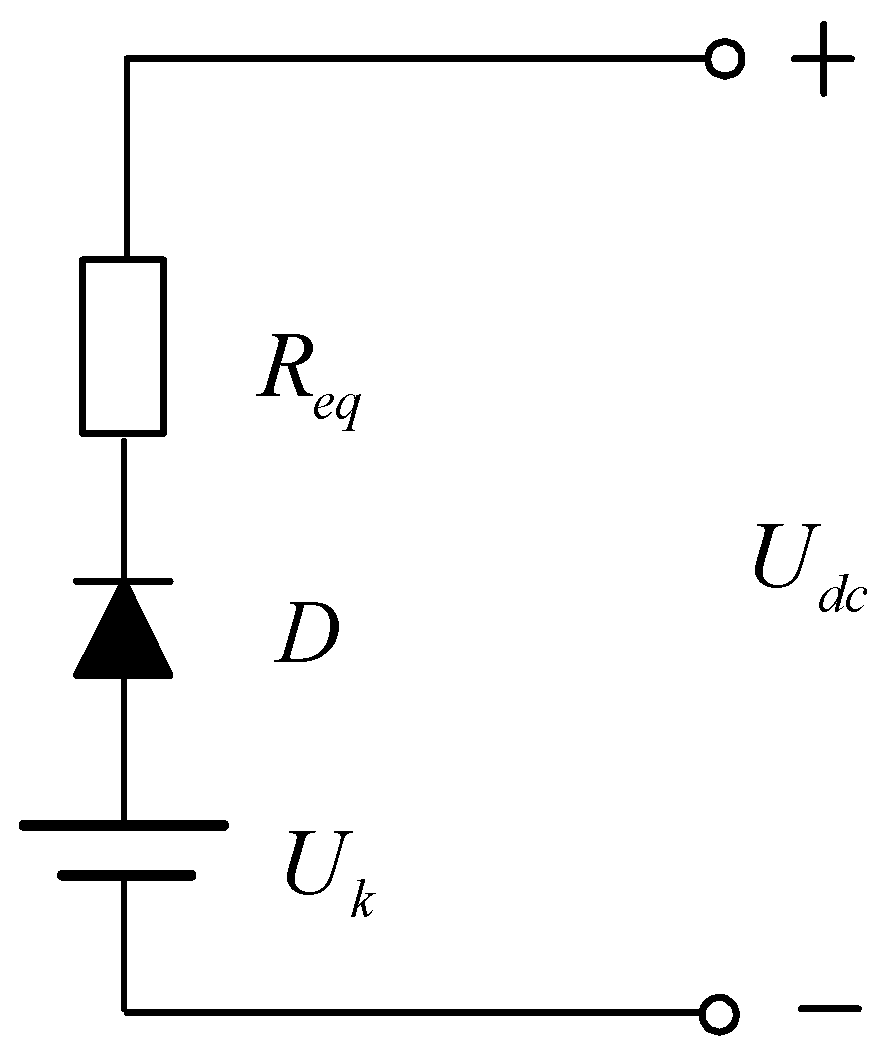
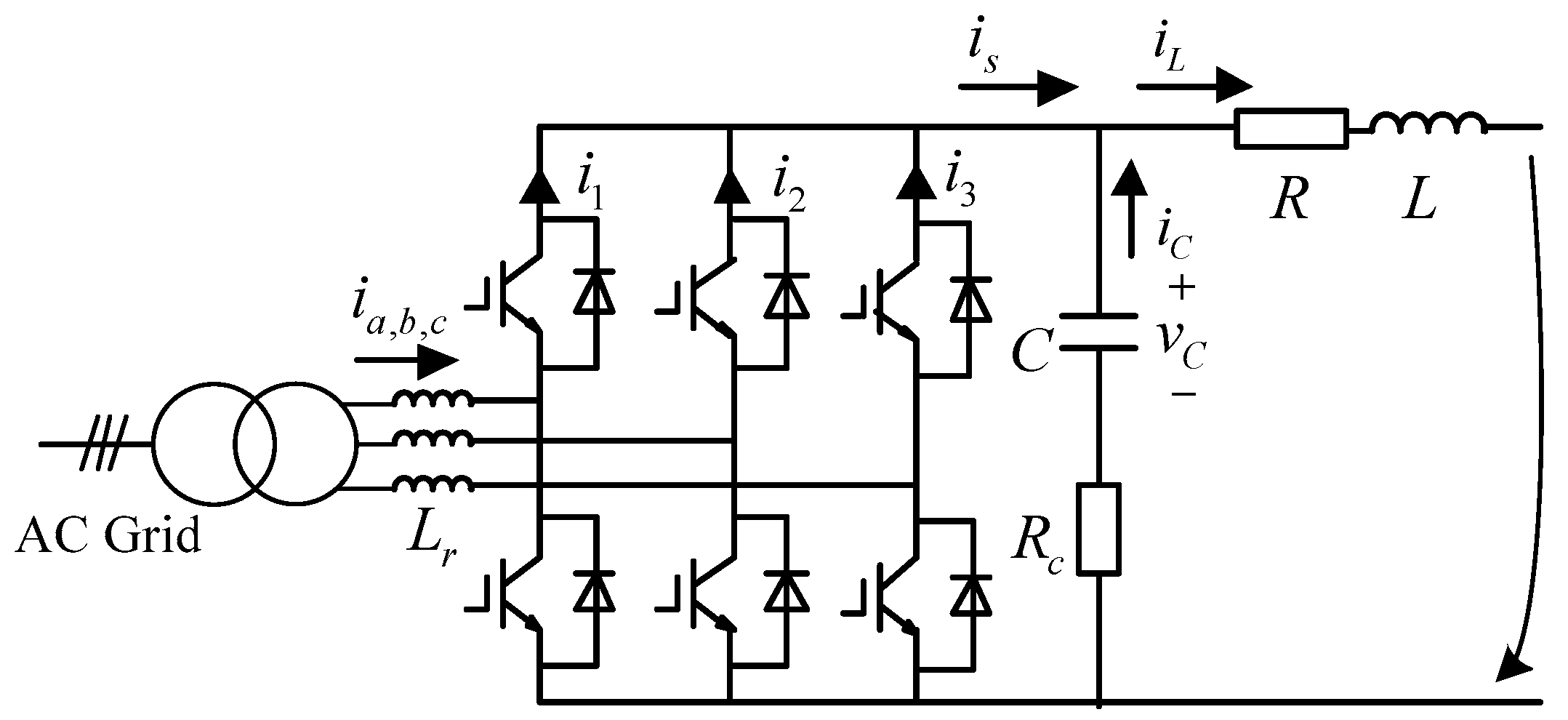
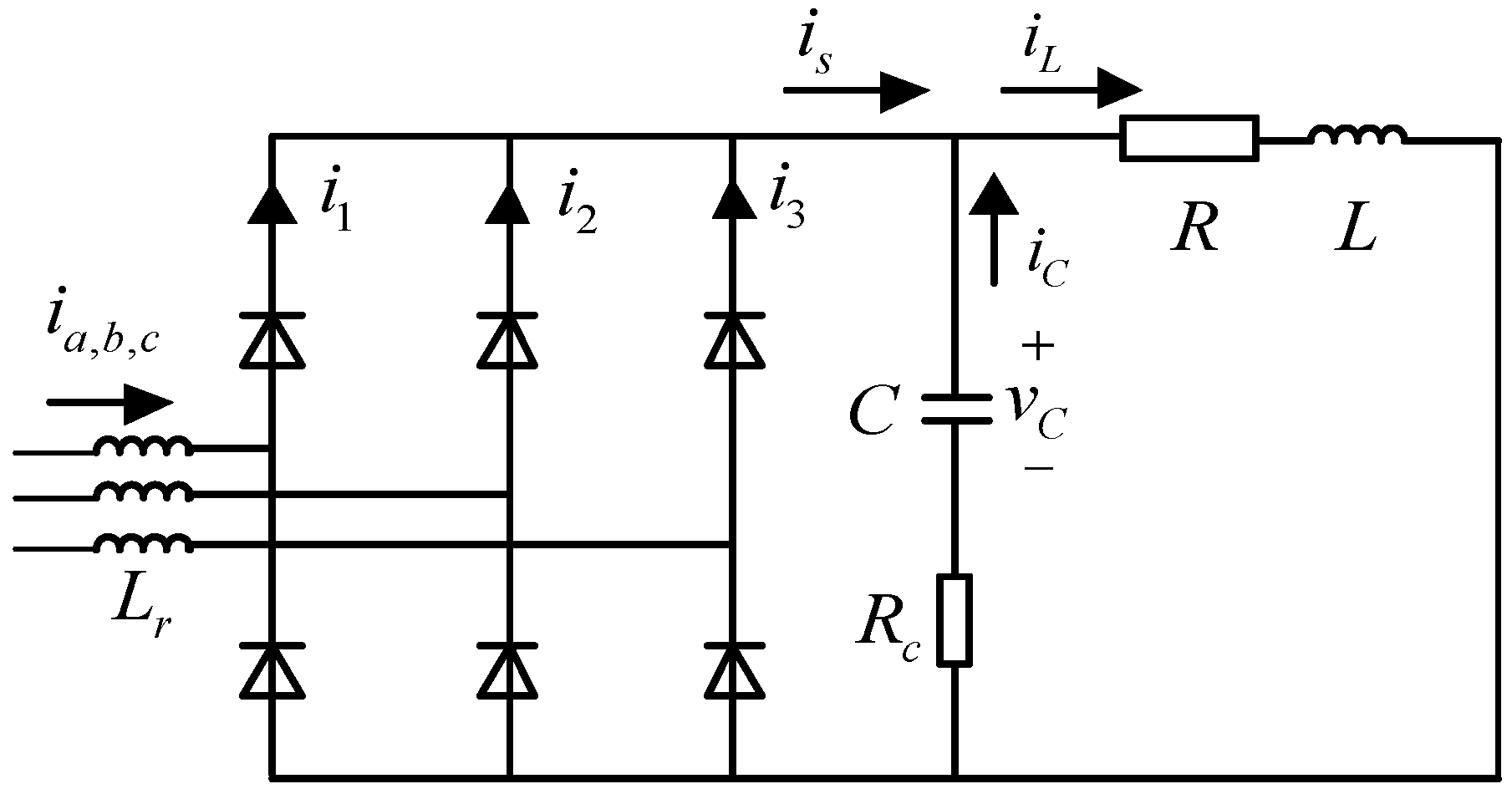
4. Analysis of the DC Short-Circuit Characteristics of the Reversible Converter
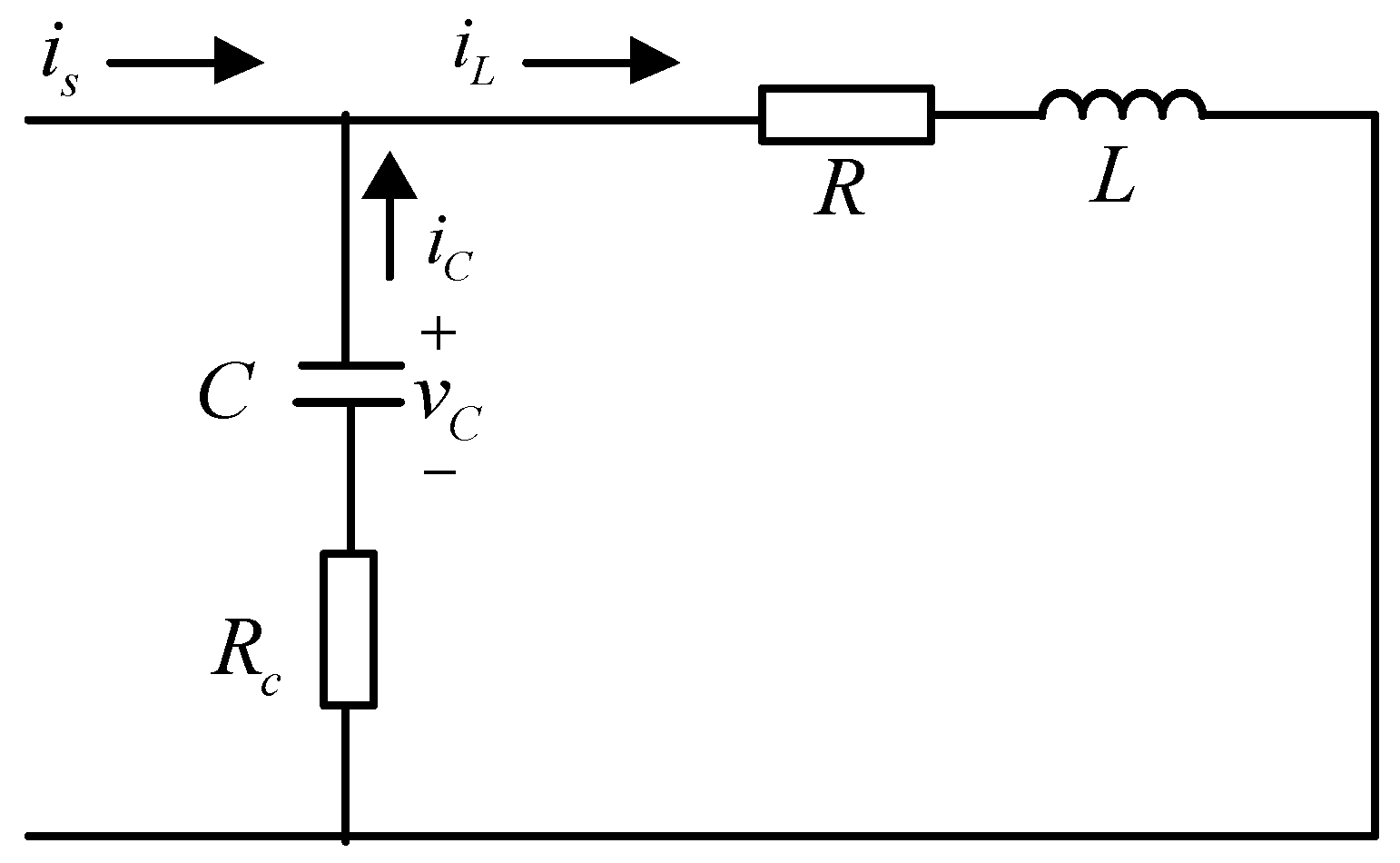
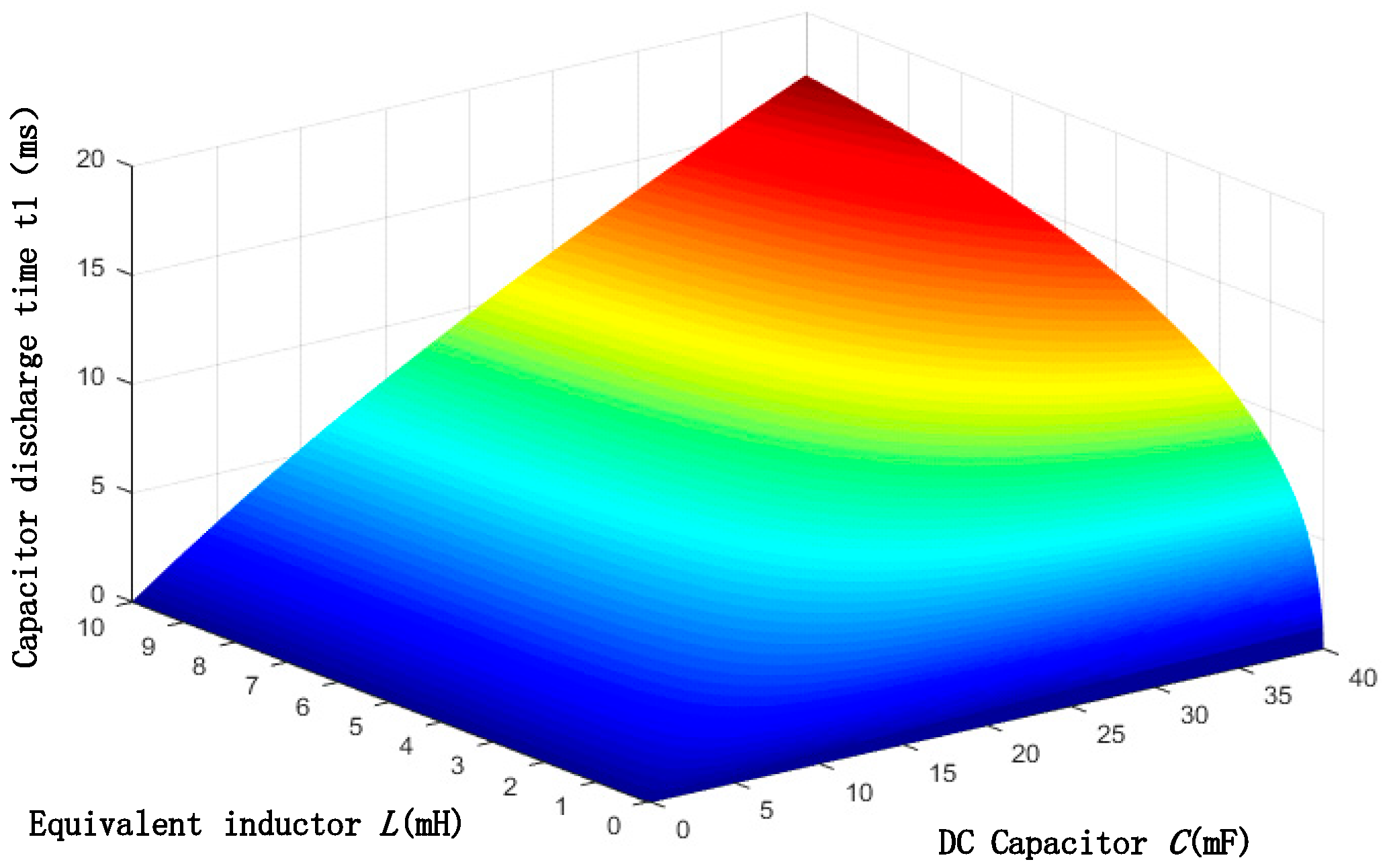
4.1. Stage of Resistance-Inductance-Capacitor (RLC) Second-Order Response
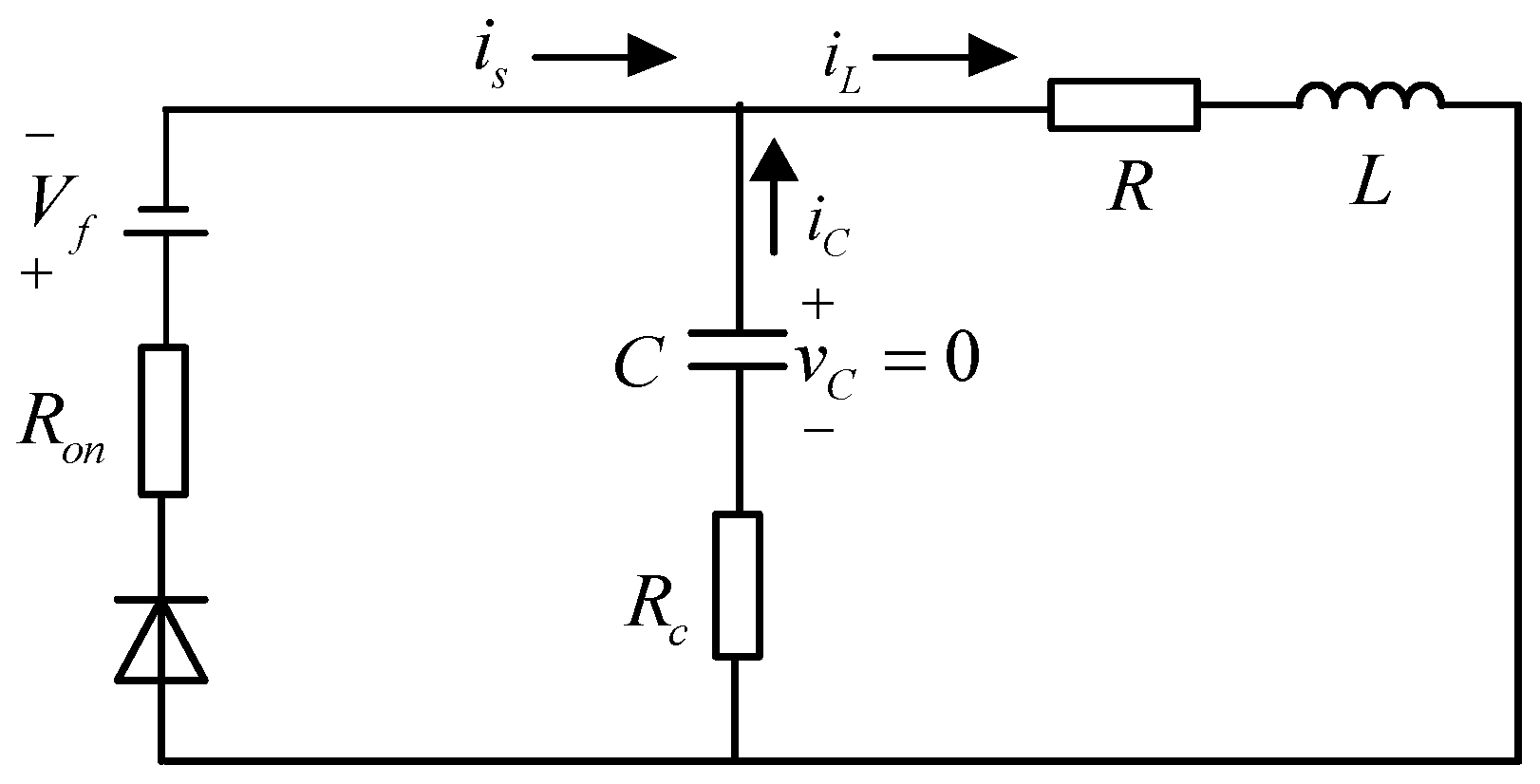
4.2. Stage of Resistance-Inductance-Diode (RLD) First-Order Response
4.3. Stage of the Uncontrolled Rectification
5. Simulation and Experiment
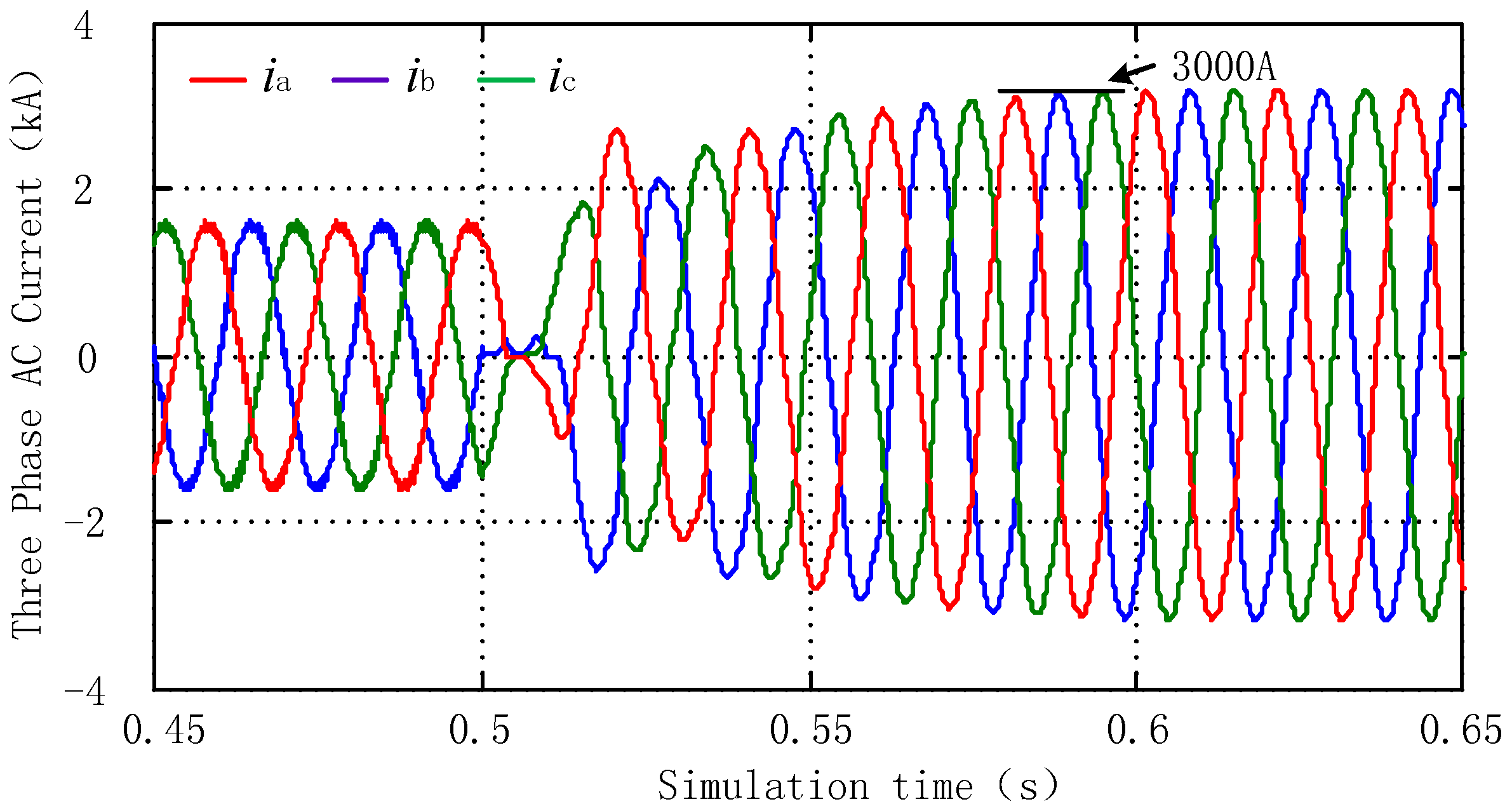
5.1. DC Short-Circuit Fault Simulation
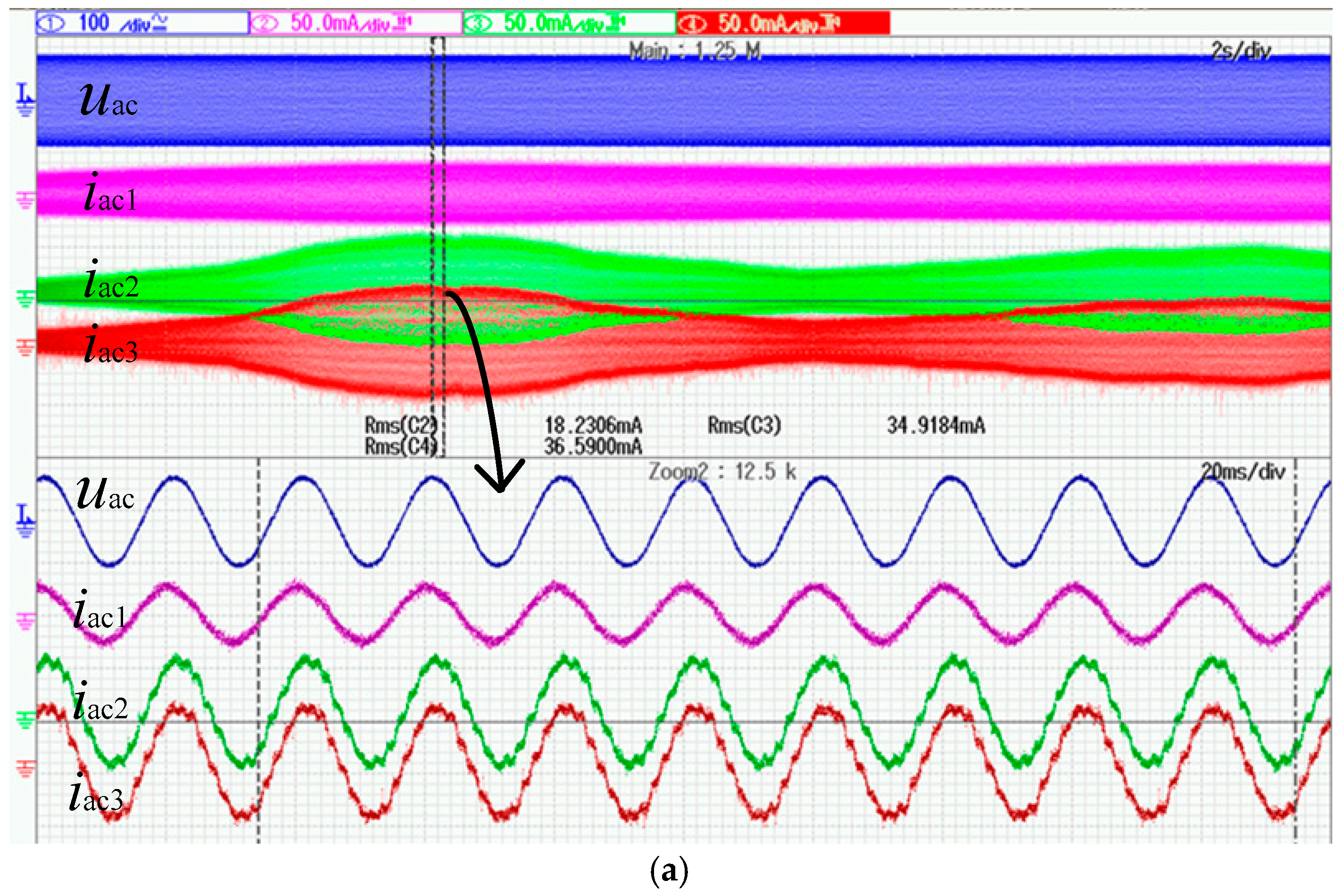
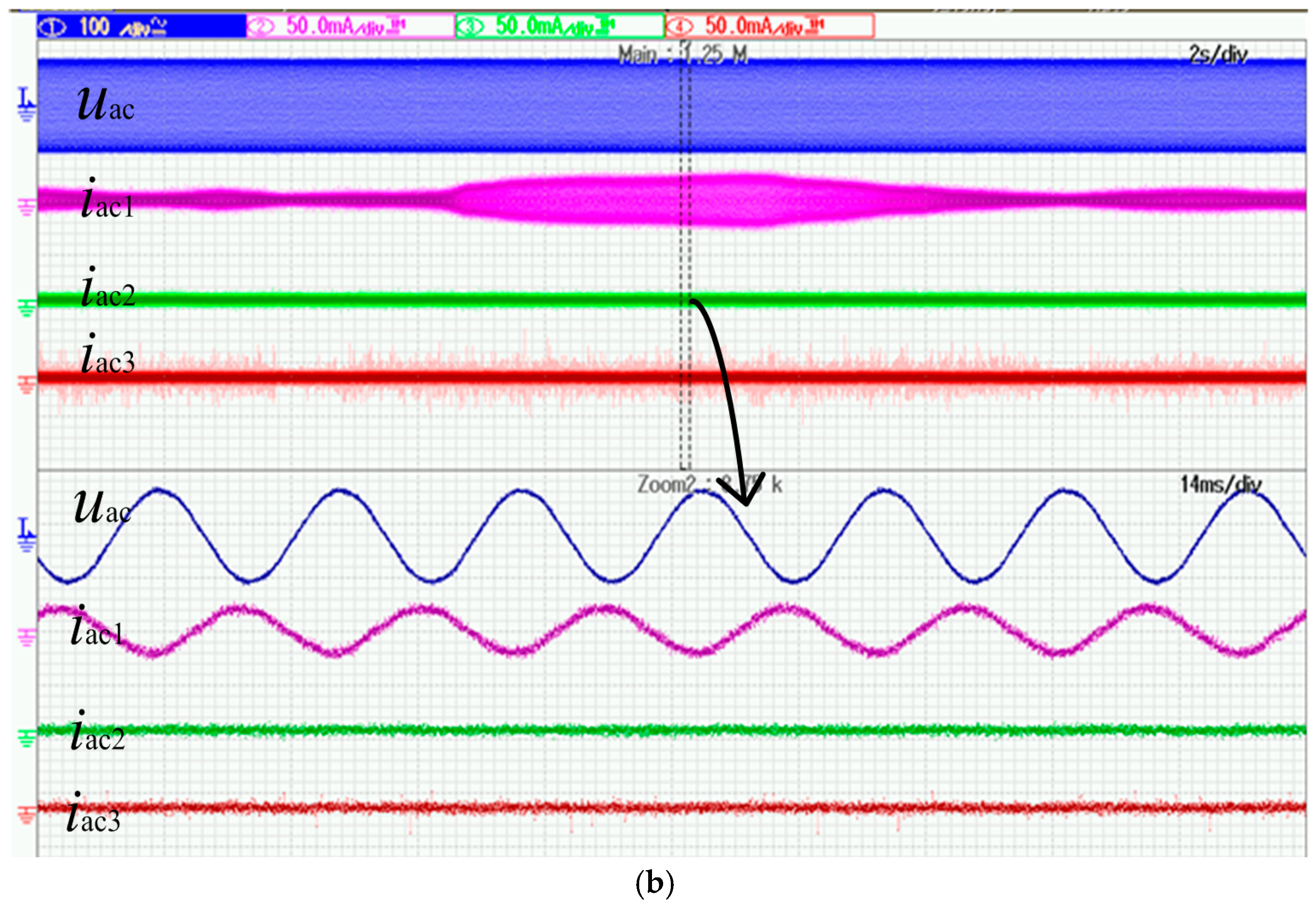
5.2. Coordinated Control Experiments
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mayet, C.; Delarue, P.; Bouscayrol, A.; Chattot, E.; Verhille, J.N. Dynamic model and causal description of a traction power substation based on 6-pulse diode rectifier. In Proceedings of the 2014 IEEE Vehicle Power and Propulsion Conference (VPPC), Coimbra, Portugal, 27–30 October 2014; pp. 1–6.
- Yang, Z.; Xia, H.; Wang, B.; Lin, F. An overview on braking energy regeneration technologies in Chinese urban railway transportation. In Proceedings of the 2014 International Power Electronics Conference (IPEC-Hiroshima 2014—ECCE ASIA), Hiroshima, Japan, 18–21 May 2014; pp. 2133–2139.
- Ratniyomchai, T.; Hillmansen, S.; Tricoli, P. Recent developments and applications of energy storage devices in electrified railways. IET Electr. Syst. Transp. 2014, 4, 9–20. [Google Scholar] [CrossRef]
- Arboleya, P.; Bidaguren, P.; Armendariz, U. Energy is on board: Energy storage and other alternatives in modern light railways. IEEE Electr. Mag. 2016, 4, 30–41. [Google Scholar] [CrossRef]
- Fajri, P.; Lee, S.; Prabhala, V.A.K.; Ferdowsi, M. Modeling and Integration of Electric Vehicle Regenerative and Friction Braking for Motor/Dynamometer Test Bench Emulation. IEEE Trans. Veh. Technol. 2016, 65, 4264–4273. [Google Scholar] [CrossRef]
- Hernandez, J.C.; Sutil, F.S. Electric Vehicle Charging Stations Feeded by Renewable: PV and Train Regenerative Braking. IEEE Lat. Am. Trans. 2016, 14, 3262–3269. [Google Scholar] [CrossRef]
- Grbovic, P.J.; Delarue, P.; Moigne, P.L.; Bartholomeus, P. The Ultracapacitor-Based Controlled Electric Drives with Braking and Ride-Through Capability: Overview and Analysis. IEEE Trans. Ind. Electron. 2011, 58, 925–936. [Google Scholar] [CrossRef]
- Itani, K.; Bernardinis, A.D.; Khatir, Z.; Jammal, A.; Oueidat, M. Extreme conditions regenerative braking modeling, control and simulation of a hybrid energy storage system for an electric vehicle in extreme conditions. IEEE Trans. Transp. Electr. 2016, 2, 465–469. [Google Scholar] [CrossRef]
- Meitei, S.N.; Kharghoria, A.P.; Chetia, U.K.; Deka, S. Regenerative braking along with ABS system in hybrid vehicles. In Proceedings of the 2016 International Conference on Computation of Power, Energy Information and Commuincation (ICCPEIC), Chennai, India, 20–21 April 2016; pp. 317–320.
- Parvini, Y.; Vahidi, A. Optimal charging of ultracapacitors during regenerative braking. In Proceedings of the 2012 IEEE International Electric Vehicle Conference (IEVC), Greenville, SC, USA, 4–8 March 2012; pp. 1–6.
- De la Torre, S.; Sánchez-Racero, A.J.; Aguado, J.A.; Reyes, M.; Martínez, O. Optimal Sizing of Energy Storage for Regenerative Braking in Electric Railway Systems. IEEE Trans. Power Syst. 2015, 30, 1492–1500. [Google Scholar] [CrossRef]
- Okui, A.; Hase, S.; Shigeeda, H.; Konishi, T.; Yoshi, T. Application of energy storage system for railway transportation in Japan. In Proceedings of the 2010 International Power Electronics Conference—ECCE ASIA, Sapporo, Japan, 21–24 June 2010; pp. 3117–3123.
- Zhou, L.; Tang, X.; Qi, Z. Control method for flywheel array energy storage system in energy harvesting from electric railway. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August 2014–3 September 2014; pp. 1–5.
- Jandura, P.; Richter, A.; Ferková, Ž. Flywheel energy storage system for city railway. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 1155–1159.
- Pastor, M.L.; Rodriguez, L.G.T.; Velez, C.V. Flywheels Store to Save: Improving railway efficiency with energy storage. IEEE Electr. Mag. 2013, 1, 13–20. [Google Scholar] [CrossRef]
- Lukasiak, P.; Antoniewicz, P.; Swierczynski, D.; Kolomyjski, W. Technology comparison of energy recuperation systems for DC rail transportation. In Proceedings of the 2015 IEEE 5th International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Riga, Latvia, 11–13 May 2015; pp. 372–376.
- Cornic, D. Efficient recovery of braking energy through a reversible dc substation. In Proceedings of the Electrical Systems for Aircraft, Railway and Ship Propulsion, Bologna, Italy, 19–21 October 2010; pp. 1–9.
- Popescu, M.; Bitoleanu, A.; Suru, V.; Preda, A. System for converting the DC traction substations into active substations. In Proceedings of the 2015 9th International Symposium on Advanced Topics in Electrical Engineering (ATEE), Bucharest, Romania, 7–9 May 2015; pp. 632–637.
- Suru, C.V.; Popescu, M.; Bitoleanu, A. Control algorithm implementation for a filtering and regeneration system used in urban traction DC substations. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 651–656.
- Kim, S.-A.; Han, G.-J.; Han, S.-W.; Cho, Y.-H. Initial firing angle control of 12-pulse parallel connected thyristor dual converter for urban railway power substations. In Proceedings of the 2016 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Anacapri, Italy, 22–24 June 2016; pp. 645–650.
- Zhang, G.; Liu, Z.; Chen, D.; Diao, L.; Lin, W.; Li, Z. Control and implementation of reversible multi-modular converter with interleaved space vector modulation. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2007; pp. 3463–3468.
- Lu, X.; Guerrero, J.M.; Sun, K.; Vasquez, J.C. An Improved Droop Control Method for DC Microgrids Based on Low Bandwidth Communication with DC Bus Voltage Restoration and Enhanced Current Sharing Accuracy. IEEE Trans. Power Electron. 2014, 29, 1800–1812. [Google Scholar] [CrossRef]
- Eren, S.; Pahlevani, M.; Bakhshai, A.; Jain, P. An Adaptive Droop DC-Bus Voltage Controller for a Grid-Connected Voltage Source Inverter with LCL Filter. IEEE Trans. Power Electron. 2015, 30, 547–560. [Google Scholar] [CrossRef]
- Huang, Y.; Yuan, X.; Hu, J.; Zhou, P.; Wang, D. DC-Bus Voltage Control Stability Affected by AC-Bus Voltage Control in VSCs Connected to Weak AC Grids. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 445–458. [Google Scholar] [CrossRef]
- Wu, T.F.; Chang, C.H.; Lin, L.C.; Yu, G.R.; Chang, Y.R. DC-Bus Voltage Control With a Three-Phase Bidirectional Inverter for DC Distribution Systems. IEEE Trans. Power Electron. 2013, 28, 1890–1899. [Google Scholar] [CrossRef]
- Xiao, L.; Xu, Z.; An, T.; Bian, Z. Improved Analytical Model for the Study of Steady State Performance of Droop-controlled VSC-MTDC Systems. IEEE Trans. Power Syst. 2016. [Google Scholar] [CrossRef]
- Pozzobon, P. Transient and steady-state short-circuit currents in rectifiers for DC traction supply. IEEE Trans. Veh. Technol. 1998, 47, 1390–1404. [Google Scholar] [CrossRef]
- Murali, P.; Santoso, S. Dynamic modeling of short-circuit behavior of a six-pulse rectifier. In Proceedings of the 2011 IEEE Electric Ship Technologies Symposium, Alexandria, VA, USA, 10–13 April 2011; pp. 486–491.
- Zhang, L.R. Control and Protection of the Wind Turbine-Based DC Microgrid. Ph.D. Thesis, North China Electric Power University, Beijing, China, 19 June 2015. [Google Scholar]
- Tang, G.; Xu, Z.; Zhou, Y. Impacts of three MMC-HVDC configurations on AC system stability under DC line faults. In Proceedings of the IEEE Power & Energy Society General Meeting, Denver, CO, USA, 26–30 July 2015; p. 1.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Values |
|---|---|
| AC input voltage Vn | 450 V |
| DC output voltage Vd | 750 V |
| AC side inductor Lr | 300 μH |
| DC Capacitance C | 36 mF |
| Capacitance parasitic resistance Rc | 0.02 mΩ |
| Equivalent internal Resistance of diode Ron | 0.3 mΩ |
| Rated power P | 1 MW |
| Switching frequency fs | 2 kHz |
| Items | Values |
|---|---|
| Short-circuit distance x | 10 m |
| Line resistance R | 0.51 mΩ |
| Line inductance L | 0.044 mH |
| Theoretical discharge time of capacitance t1 | 1.9 ms |
| Theoretical peak current inductance iL(t1) | 23,000 A |
| Theoretical period component amplitude of short-circuit current Im | 3886 A |
| Items | Values |
|---|---|
| Short-circuit distance x | 1.7 km |
| Line resistance R | 86.7 mΩ |
| Line inductor L | 7.553 mH |
| Theoretical discharge time of capacitor t1 | 14.6 ms |
| Theoretical peak current of inductance iL(t1) | 2572 A |
| Theoretical period component amplitude of short-circuit current Im | 2550 A |
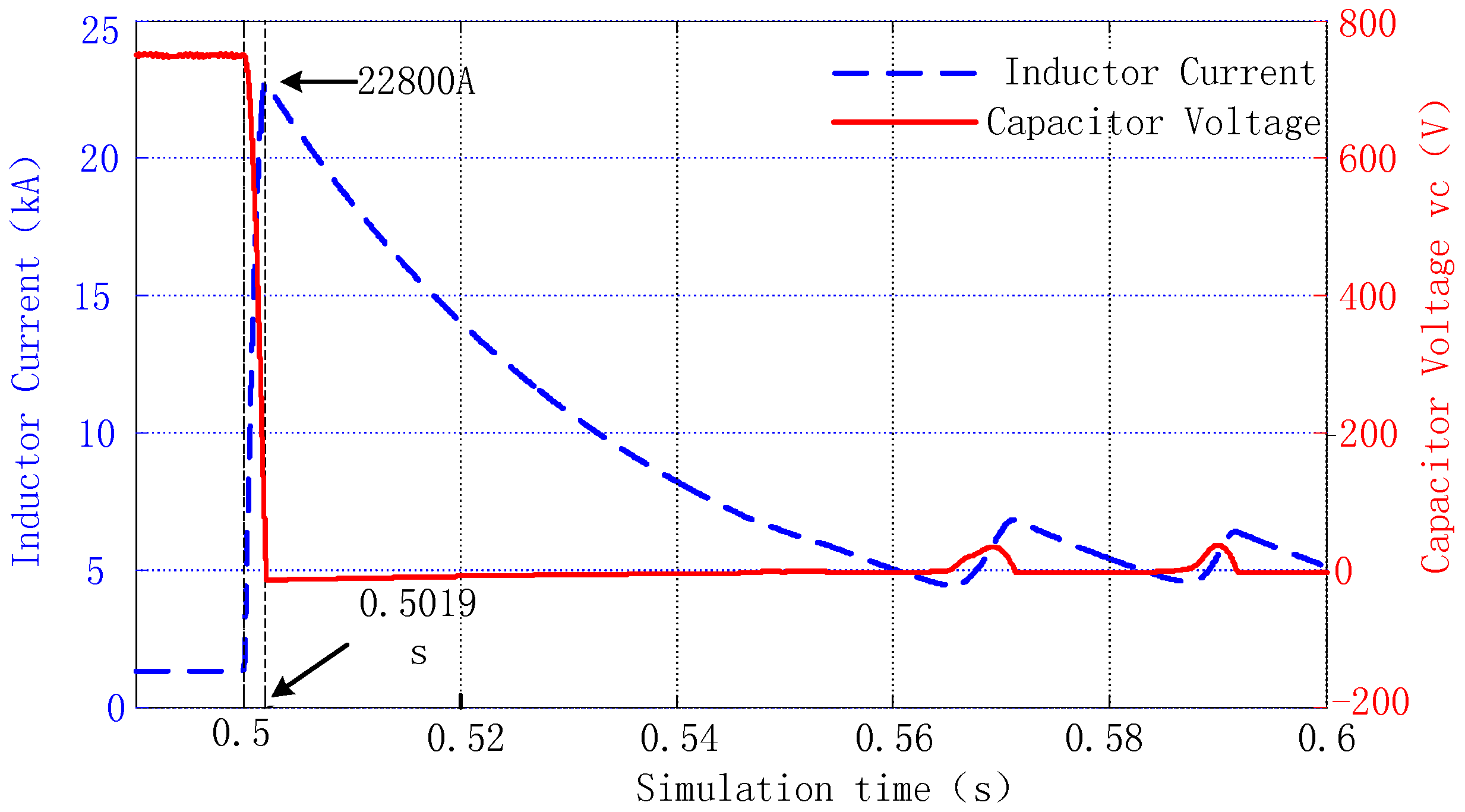
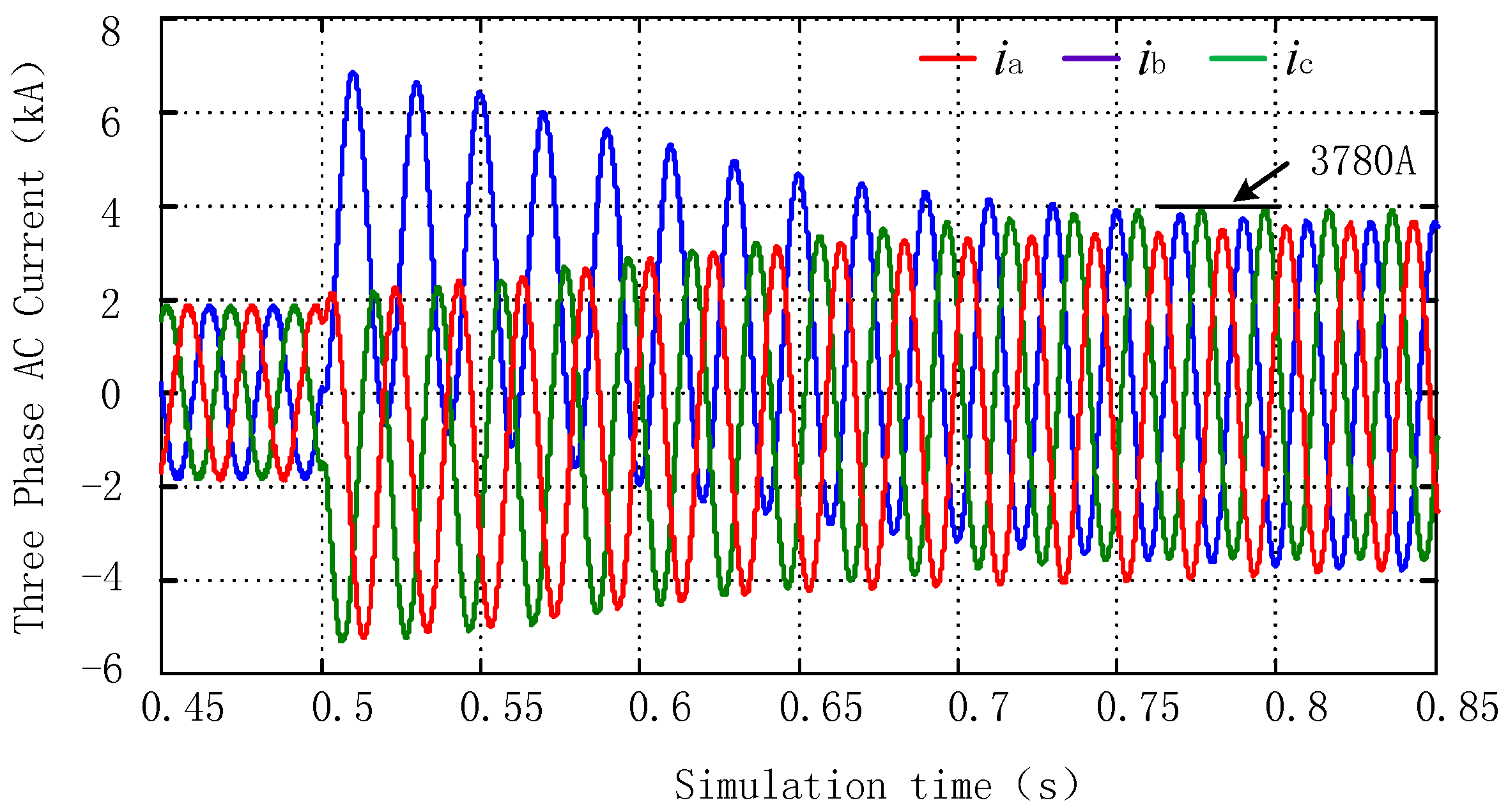
| Short-Circuit Point | Parameters | Calculation Results | Simulation Results |
|---|---|---|---|
| PSC, x = 10 m | t1 | 1.9 ms | 2 ms |
| iL(t1) | 23,000 A | 22,800 A | |
| Im | 3886 A | 3780 A | |
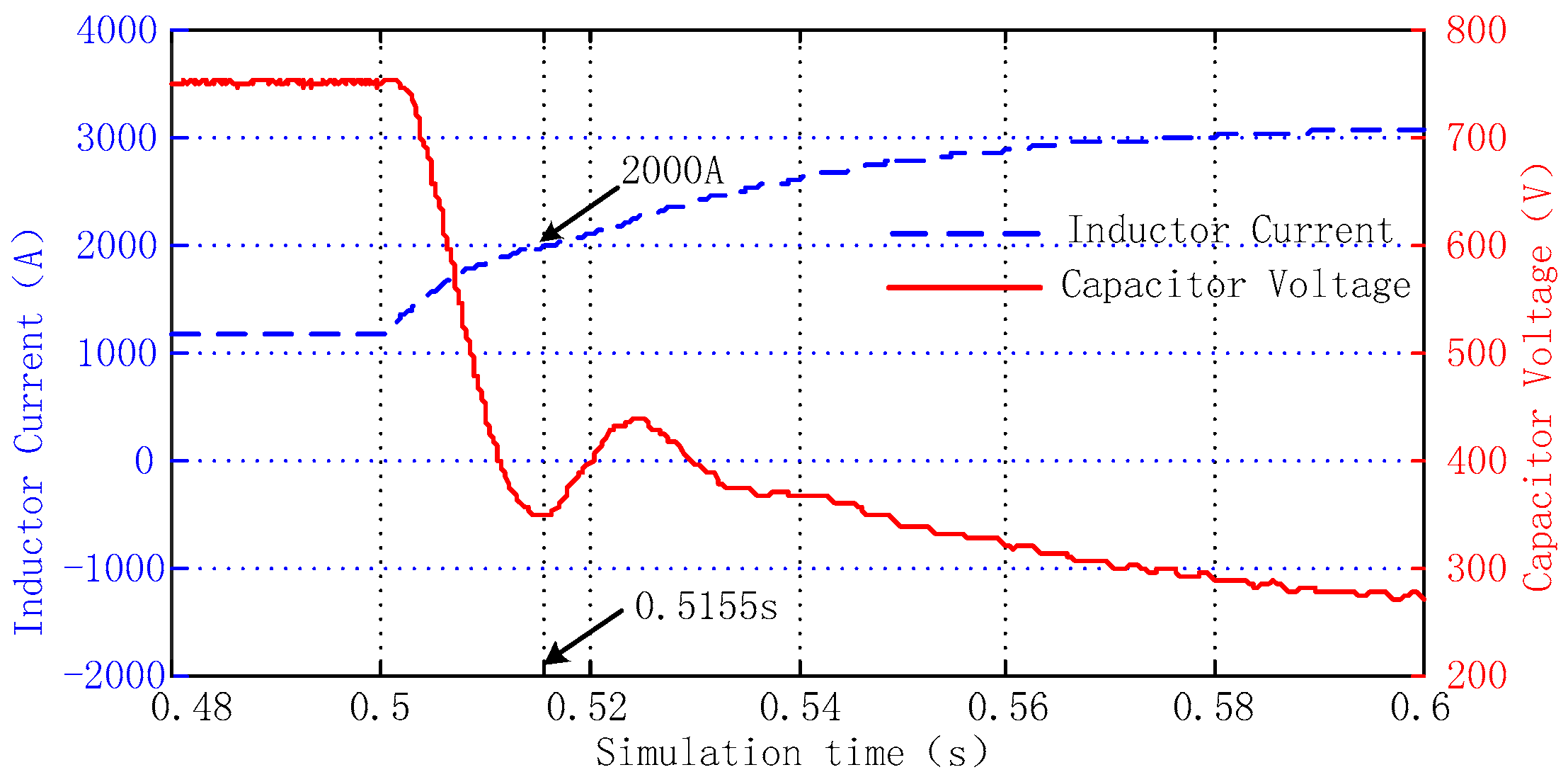
| RSC, x = 1.7 km | t1 | 14.6 ms | 15.5 ms |
| iL(t1) | 2572 A | 2000 A | |
| Im | 2550 A | 3000 A |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| AC grid voltage | 10 kV | Transformer capacity | 1.6 MVA |
| DC rated voltage | 750 V | IGBT specification | 2400 A/1700 V |
| Converter capacity | 2 MW | Switching frequency | 2 kHz |
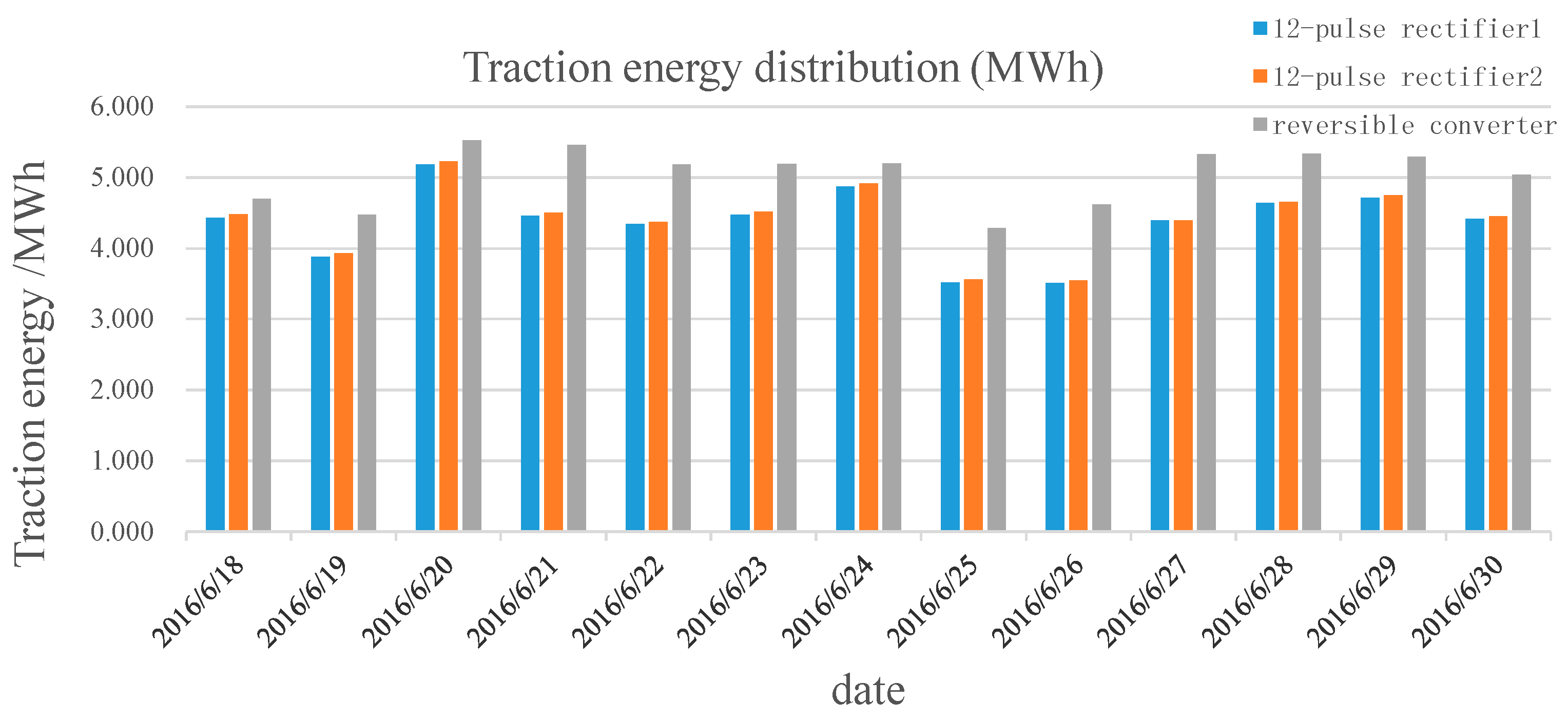
| Date | 12-Pulse Rectifier 1/A | 12-Pulse Rectifier 2/B | Reversible Converter | Total Traction Energy/A + B + C | Percentage of C/(A + B + C) | |
|---|---|---|---|---|---|---|
| Rectifying/C | Inverting/D | |||||
| 2016/6/18 | 4.432 | 4.482 | 4.699 | 0.974 | 13.613 | 34.52% |
| 2016/6/19 | 3.880 | 3.928 | 4.474 | 0.769 | 12.282 | 36.43% |
| 2016/6/20 | 5.186 | 5.227 | 5.528 | 1.498 | 15.941 | 34.68% |
| 2016/6/21 | 4.463 | 4.505 | 5.456 | 1.593 | 14.424 | 37.83% |
| 2016/6/22 | 4.345 | 4.377 | 5.183 | 2.154 | 13.905 | 37.27% |
| 2016/6/23 | 4.476 | 4.514 | 5.196 | 2.334 | 14.186 | 36.63% |
| 2016/6/24 | 4.874 | 4.916 | 5.198 | 1.942 | 14.988 | 34.68% |
| 2016/6/25 | 3.521 | 3.560 | 4.282 | 0.656 | 11.363 | 37.68% |
| 2016/6/26 | 3.508 | 3.548 | 4.623 | 0.511 | 11.679 | 39.58% |
| 2016/6/27 | 4.390 | 4.393 | 5.327 | 1.389 | 14.110 | 37.75% |
| 2016/6/28 | 4.642 | 4.654 | 5.336 | 2.335 | 14.632 | 36.47% |
| 2016/6/29 | 4.717 | 4.752 | 5.290 | 2.519 | 14.759 | 35.84% |
| 2016/6/30 | 4.418 | 4.453 | 5.041 | 1.370 | 13.912 | 36.23% |
| sum | 56.852 | 57.309 | 65.633 | 20.044 | 179.794 | 36.50% |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, G.; Qian, J.; Zhang, X. Application of a High-Power Reversible Converter in a Hybrid Traction Power Supply System. Appl. Sci. 2017, 7, 282. https://doi.org/10.3390/app7030282
Zhang G, Qian J, Zhang X. Application of a High-Power Reversible Converter in a Hybrid Traction Power Supply System. Applied Sciences. 2017; 7(3):282. https://doi.org/10.3390/app7030282
Chicago/Turabian StyleZhang, Gang, Jianglin Qian, and Xinyu Zhang. 2017. "Application of a High-Power Reversible Converter in a Hybrid Traction Power Supply System" Applied Sciences 7, no. 3: 282. https://doi.org/10.3390/app7030282
APA StyleZhang, G., Qian, J., & Zhang, X. (2017). Application of a High-Power Reversible Converter in a Hybrid Traction Power Supply System. Applied Sciences, 7(3), 282. https://doi.org/10.3390/app7030282