
Energy Regeneration Hydraulic System via a Relief Valve with Energy Regeneration Unit

Abstract
:Featured Application
Abstract
1. Introduction
2. Configuration of the PRV with HERU
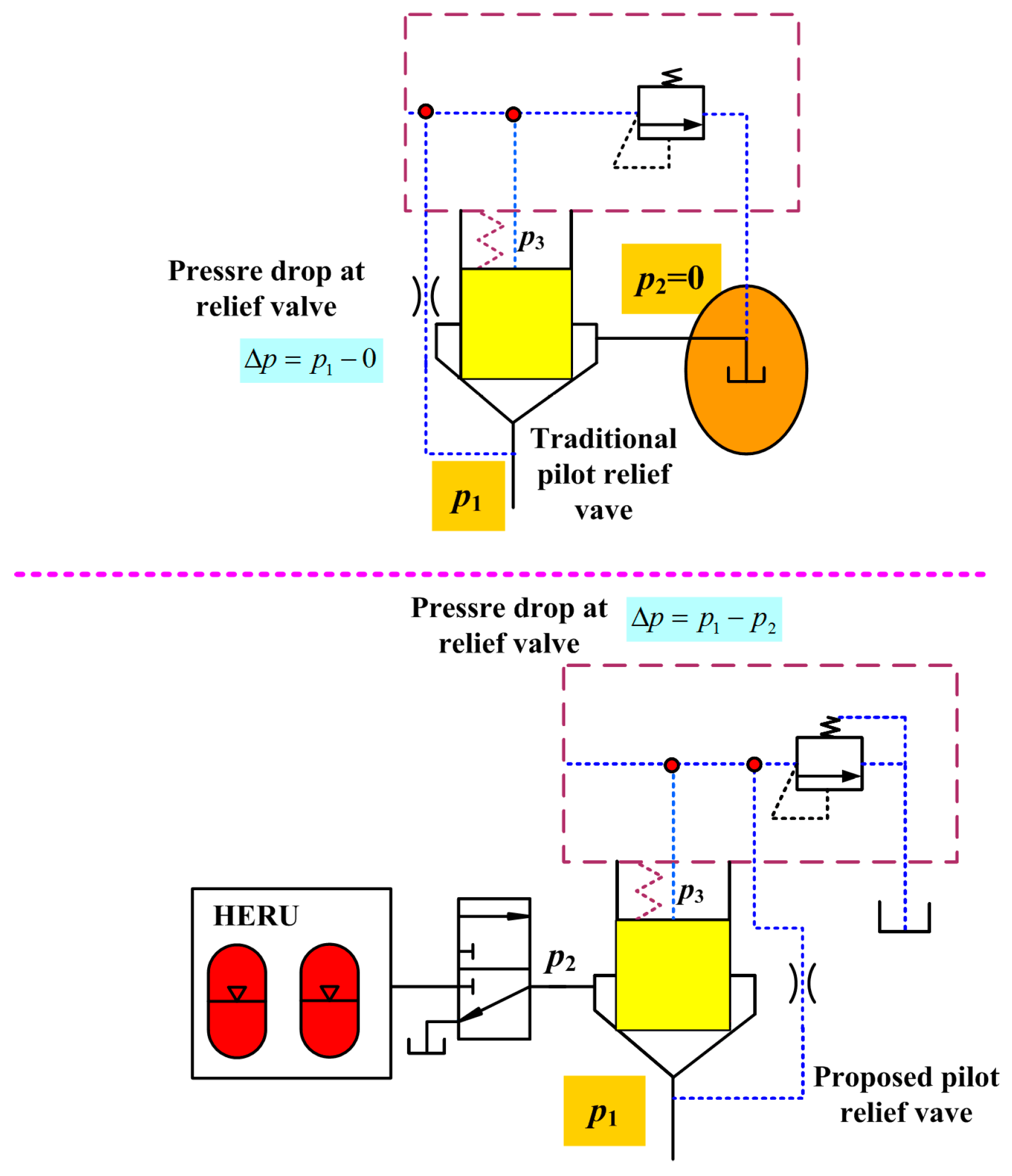
2.1. Configuration of HERU of Energy Loss in Relief Valve
2.2. Working Principles of the PRV
3. Control System
3.1. Working Pressure of the HA
3.2. Control Flow
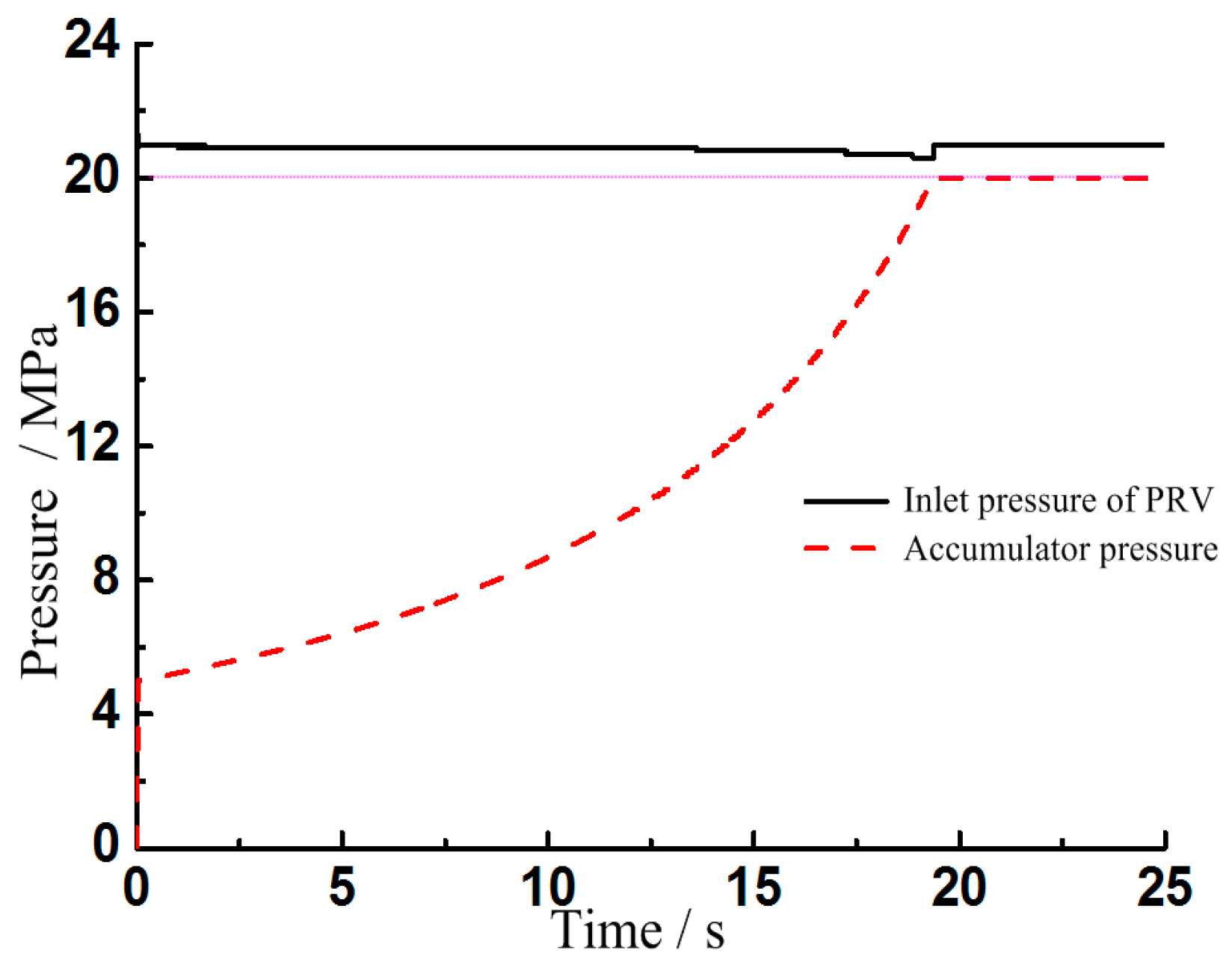
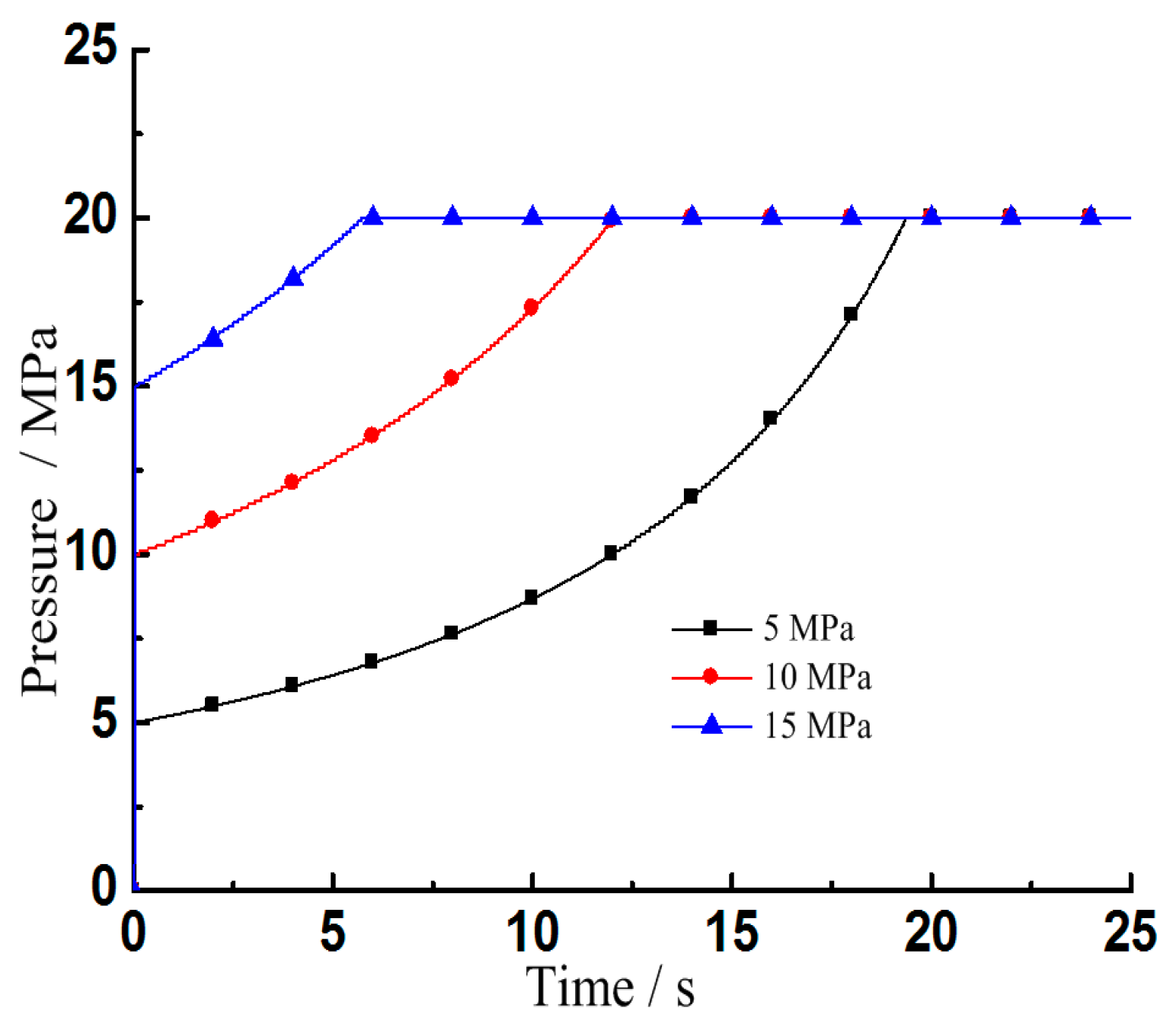
4. Simulation Results
5. Experimental Study and Discussion
5.1. Test Rig
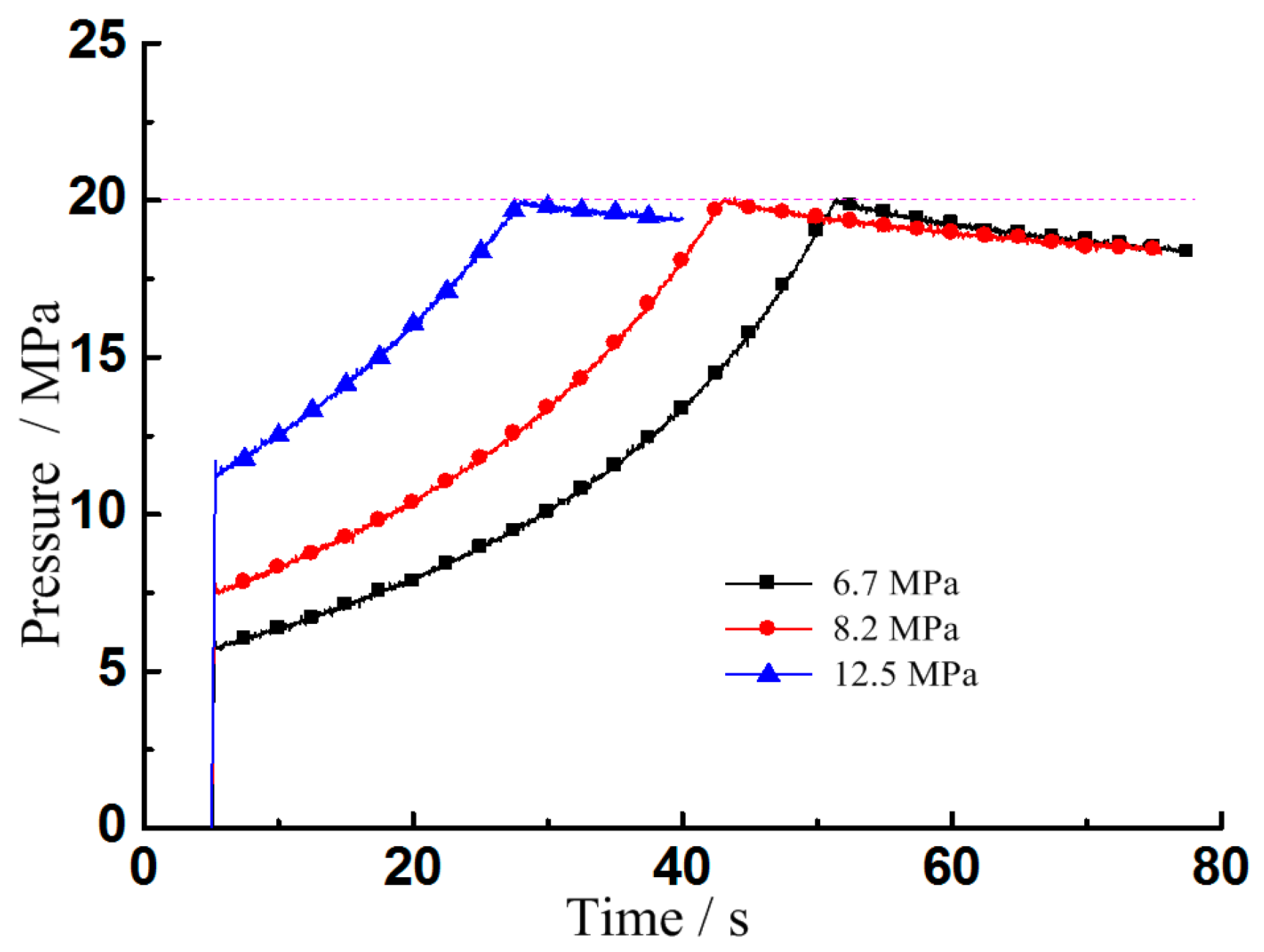
5.2. Results and Discussion
5.2.1. Control Performance
5.2.2. Regeneration Efficiency
6. Conclusions
- (1)
- To reduce the energy loss of the relief valve, the HERU is connected to the outlet of the PRV, which can increase the outlet pressure and thus reduce the pressure drop between the inlet and outlet. The overflow energy loss that backs into the tank directly in the traditional working conditions is converted into hydraulic energy, which is stored in the hydraulic accumulator and can be released when needed.
- (2)
- The PRV with HERU connected to the outlet can still have a better function in regulating pressure. The flow rate of the PRV is almost constant independent of whether the HERU is connected or disconnected to the PRV after a short adjusting time.
- (3)
- A higher pre-charge pressure can achieve higher regeneration efficiency, while the lower pre-charge pressure can regenerate more energy. The chosen pressure of the HA should consider the regeneration efficiency, the actual working style, and the installation space.
- (4)
- Further research will concentrate on the multiple HA used in the proposed HERU and the control of them to regenerate as much energy as possible with a higher regeneration efficiency.
Acknowledgments
Author Contributions
Conflicts of Interest
Nomenclatures and Symbols
References
- Shen, W.; Jiang, J.; Su, X.; Karimi, H.R. Control strategy analysis of the hydraulic hybrid excavator. J. Frankl. Inst. 2015, 352, 541–561. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, Q.; Wang, T. A novel hybrid control strategy for potential energy regeneration systems of hybrid hydraulic excavators. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2016, 230, 375–384. [Google Scholar] [CrossRef]
- Lin, T.; Wang, Q.; Hu, B.; Gong, W. Development of hybrid powered hydraulic construction machinery. Autom. Constr. 2010, 19, 11–19. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.C.; Li, X.; Tang, Y.; Hou, D.; Teng, W. Real-time electro-hydraulic hybrid system for structural testing subjected to vibration and force loading. Mechatronics 2016, 33, 49–70. [Google Scholar] [CrossRef]
- Shi, Y.; Li, F.; Cai, M.; Yu, Q. Literature review: Present state and future trends of air-powered vehicles. J. Renew. Sustain. Energy 2016, 8, 325–342. [Google Scholar] [CrossRef]
- Chen, Q.; Wu, W.; Liu, W.; Zhang, X. Research on pump control signal of excavator positive control system. J. Hefei Univ. Technol. (Nat. Sci.) 2014, 37, 645–649. [Google Scholar]
- Cheng, M.; Zhang, J.; Ding, R.; Xu, B. Pump-based compensation for dynamic improvement of the electrohydraulic flow matching system. IEEE Trans. Ind. Electron. 2016, 64, 2903–2913. [Google Scholar] [CrossRef]
- Sugimura, K.; Murrenhoff, H. Hybrid Load Sensing–Displacement Controlled Archtecture for Excavators. In Proceedings of the 14th Scandinavian International Conference on Fluid Power (SICFP’15), Tampere, Finland, 20–22 May 2015. [Google Scholar]
- Xu, B.; Liu, Y.J.; Yang, H.Y. Research on electro-hydraulic proportional load sense separate meter in and separate meter out control system. Hunan Daxue Xuebao/J. Hunan Univ. Natl. Sci. 2010, 37, 190–196. [Google Scholar]
- Quan, Z.; Quan, L.; Zhang, J. Review of energy efficient direct pump controlled cylinder electro-hydraulic technology. Renew. Sustain. Energy Rev. 2014, 35, 336–346. [Google Scholar] [CrossRef]
- Shen, W.; Jiang, J. Analysis and development of the hydraulic secondary regulation system based on the CPR. In Proceedings of the International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; pp. 117–122. [Google Scholar]
- Hippalgaonkar, R.; Ivantysynova, M.; Zimmerman, J. Fuel savings of a mini-excavator through a hydraulic hybrid displacement controlled system. In Proceedings of the 8th International Fluid Power Conference, Dresden, Germany, 26–28 March 2012; pp. 139–153. [Google Scholar]
- Ren, H.; Lin, T.; Huang, W.; Fu, S.; Chen, Q. Characteristics of the energy regeneration and reutilization system during the acceleration stage of the swing process of a hydraulic excavator. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 842–856. [Google Scholar] [CrossRef]
- Wang, B. High Speed On-Off Valve Self-adapting Clamping System. J. Appl. Sci. 2014, 14, 279–284. [Google Scholar] [CrossRef]
- Shi, Y.; Wu, T.; Cai, M.; Wang, Y.; Xu, W. Energy conversion characteristics of a hydropneumatic transformer in a sustainable-energy vehicle. Appl. Energy 2016, 171, 77–85. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q. Design and analysis of compound potential energy regeneration system for hybrid hydraulic excavator. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2012, 226, 1323–1334. [Google Scholar] [CrossRef]
- Wang, T.; Wang, Q.; Lin, T. Improvement of boom control performance for hybrid hydraulic excavator with potential energy recovery. Autom. Constr. 2013, 30, 161–169. [Google Scholar] [CrossRef]
- Lin, T.; Chen, Q.; Ren, H.; Miao, C.; Chen, Q.; Fu, S. Influence of the energy regeneration unit on pressure characteristics for a proportional relief valve. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2017, 231, 189–198. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pre-charge pressure/MPa | 6.7 | 8.2 | 12.5 |
| Energy loss through PRV without HERU/kJ | 206.3 | 166.0 | 94.8 |
| Regenerated energy in HA/kJ | 126.3 | 114.8 | 79.2 |
| Regeneration efficiency/% | 61.2 | 69.2 | 83.6 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, T.; Chen, Q.; Ren, H.; Zhao, Y.; Miao, C.; Fu, S.; Chen, Q. Energy Regeneration Hydraulic System via a Relief Valve with Energy Regeneration Unit. Appl. Sci. 2017, 7, 613. https://doi.org/10.3390/app7060613
Lin T, Chen Q, Ren H, Zhao Y, Miao C, Fu S, Chen Q. Energy Regeneration Hydraulic System via a Relief Valve with Energy Regeneration Unit. Applied Sciences. 2017; 7(6):613. https://doi.org/10.3390/app7060613
Chicago/Turabian StyleLin, Tianliang, Qiang Chen, Haoling Ren, Yi Zhao, Cheng Miao, Shengjie Fu, and Qihuai Chen. 2017. "Energy Regeneration Hydraulic System via a Relief Valve with Energy Regeneration Unit" Applied Sciences 7, no. 6: 613. https://doi.org/10.3390/app7060613
APA StyleLin, T., Chen, Q., Ren, H., Zhao, Y., Miao, C., Fu, S., & Chen, Q. (2017). Energy Regeneration Hydraulic System via a Relief Valve with Energy Regeneration Unit. Applied Sciences, 7(6), 613. https://doi.org/10.3390/app7060613