Design, Measurement and Shape Reconstruction of Soft Surgical Actuator Based on Fiber Bragg Gratings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
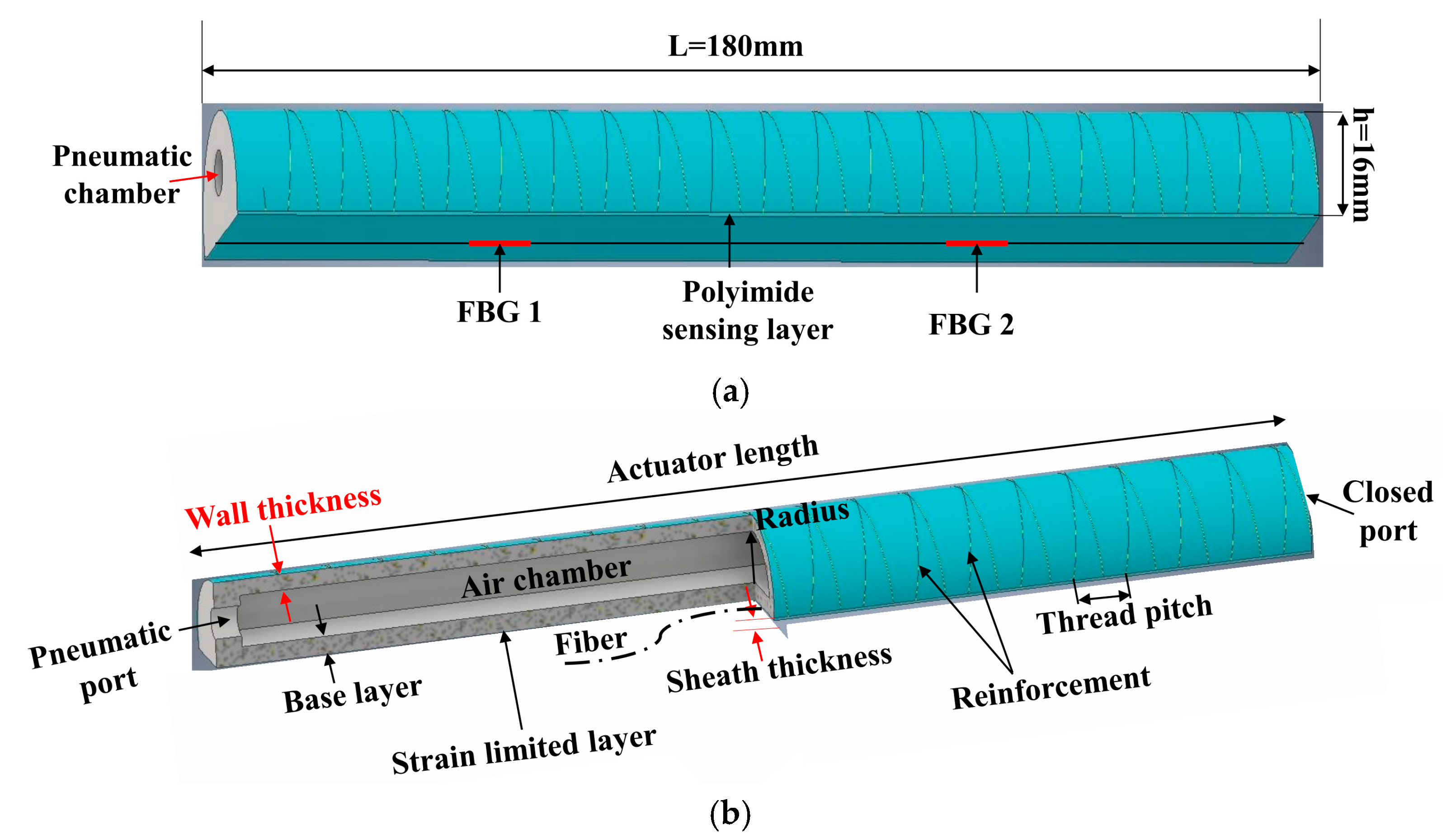
2. Design and Modeling of Soft Actuator with Embedded FBG Sensors
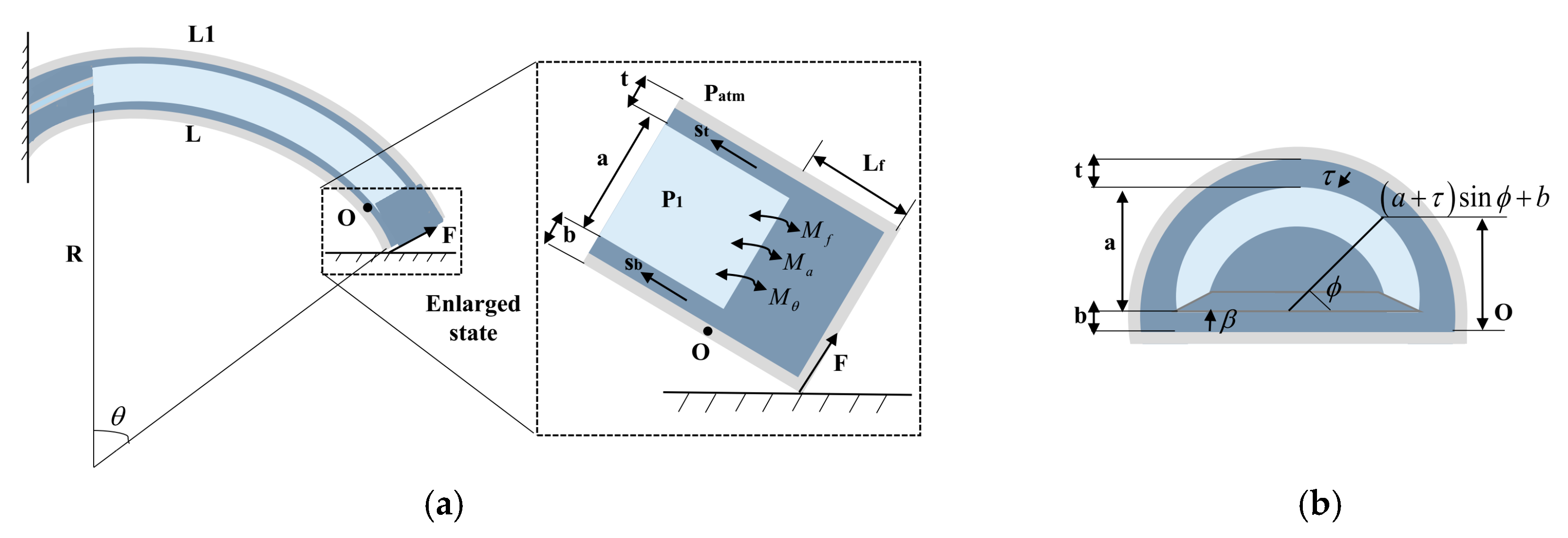
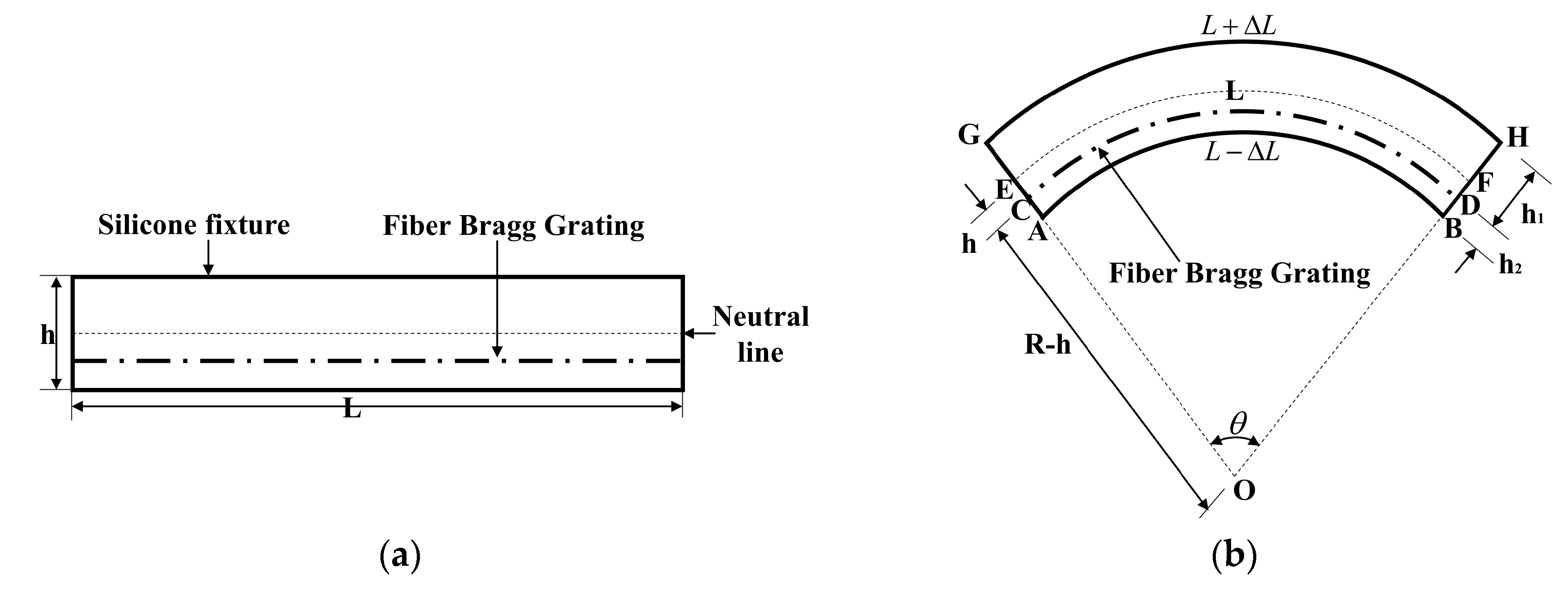
2.1. Structure Design and Analytical Modeling
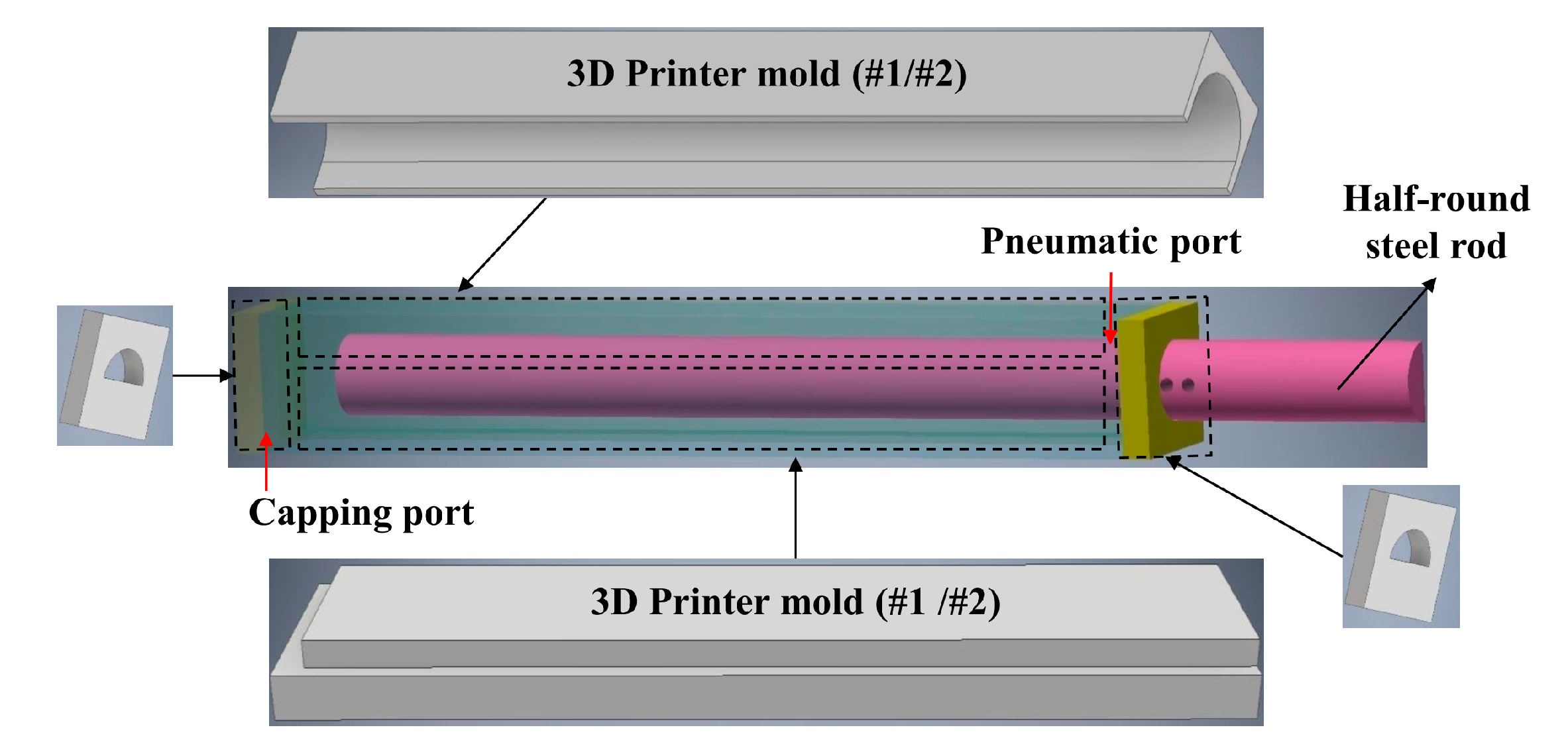
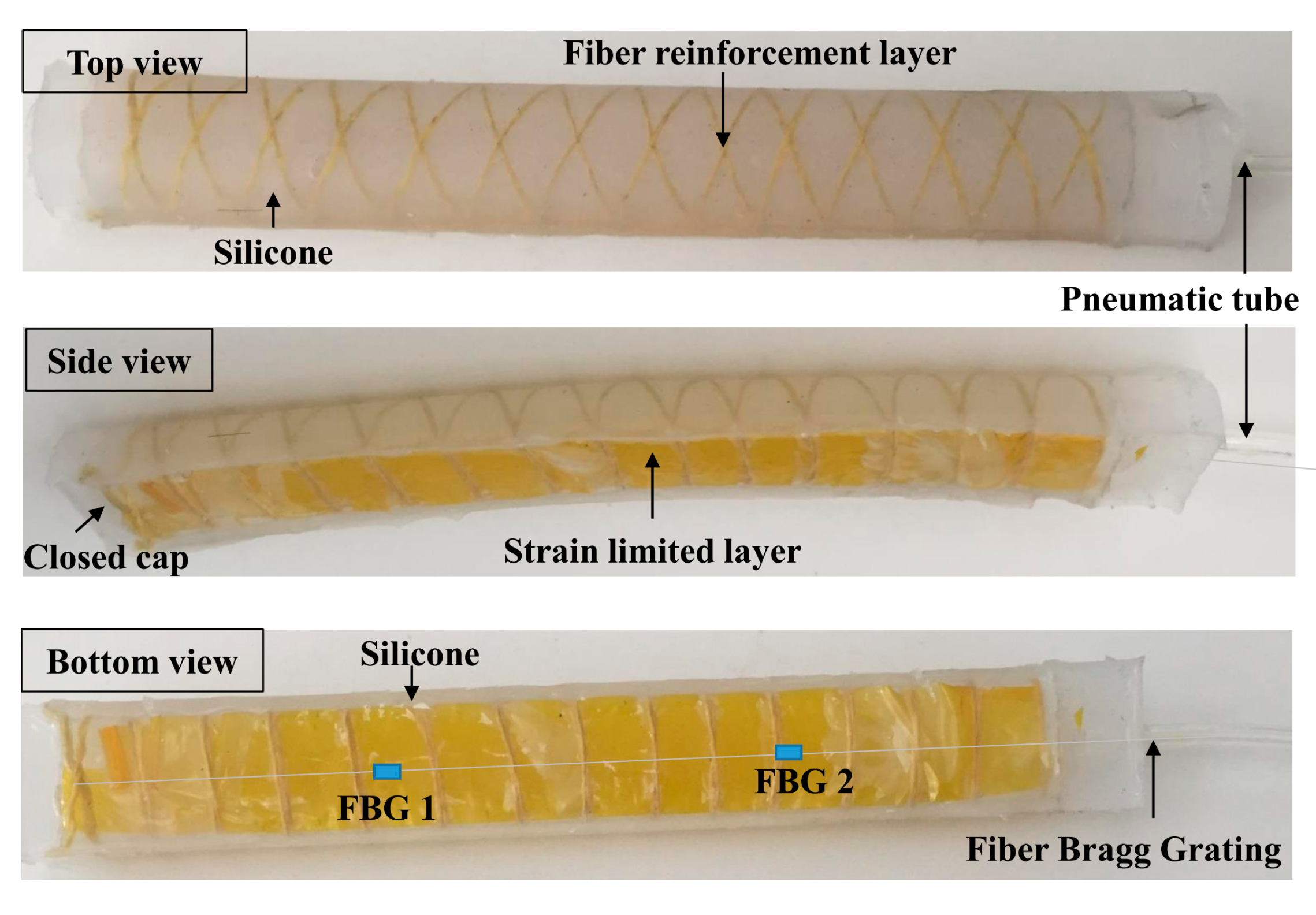
2.2. The Fabrication and Prototype of the Soft Actuator
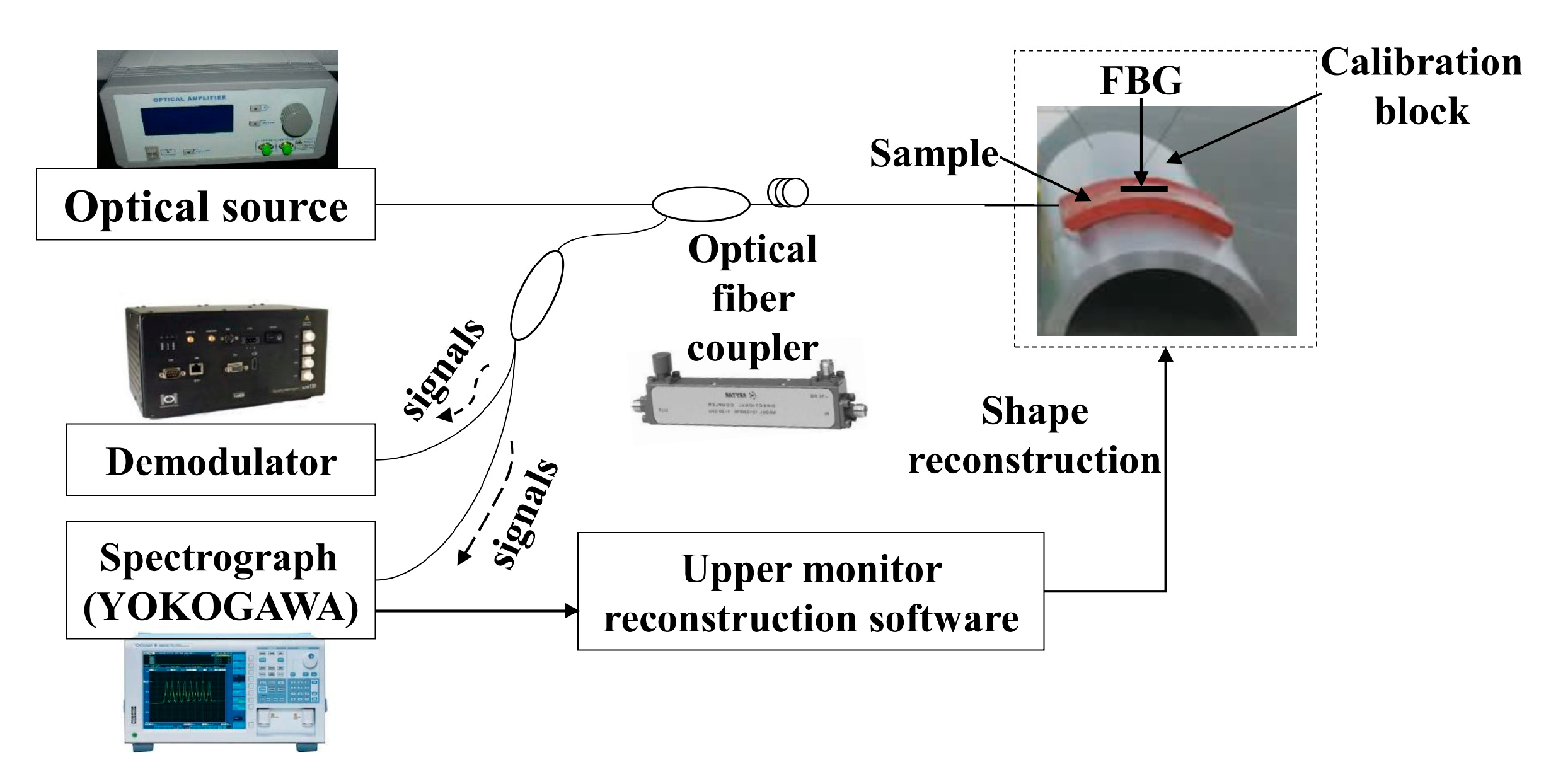
3. Principle of Sensing and Measurement of Embedded FBGs
4. Experiment Testing and Discussions
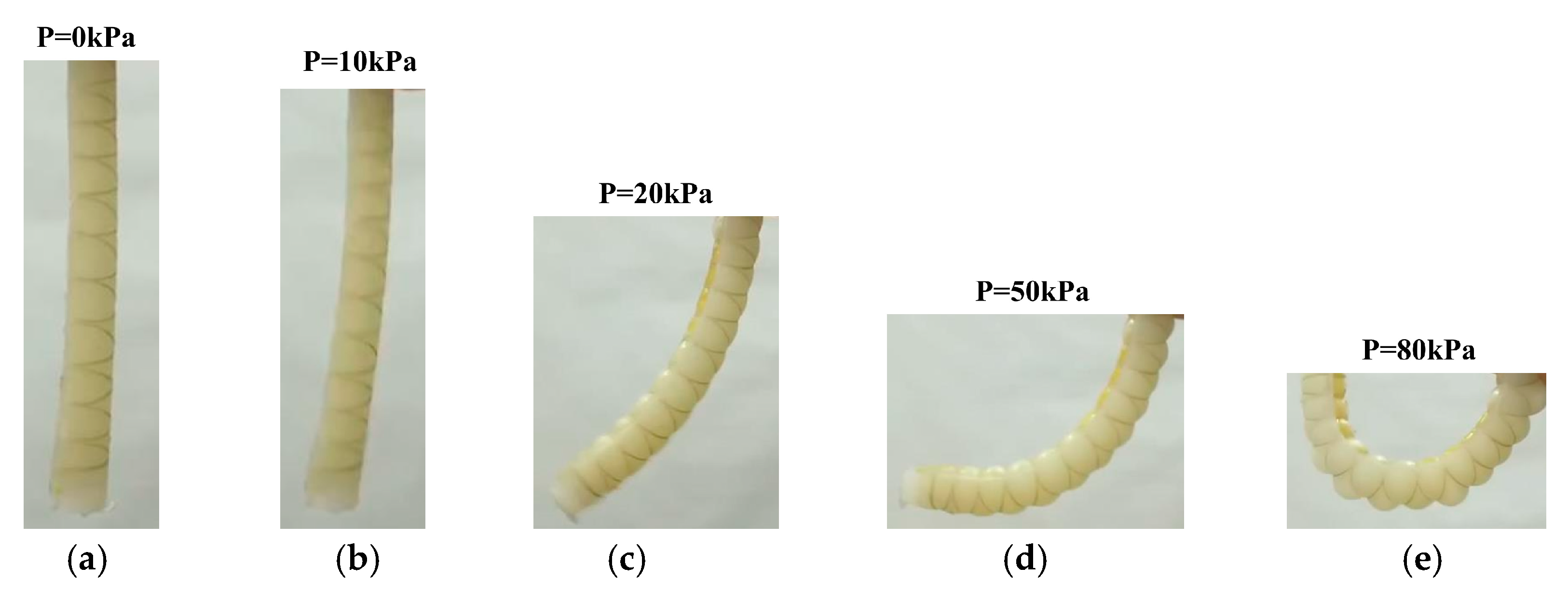
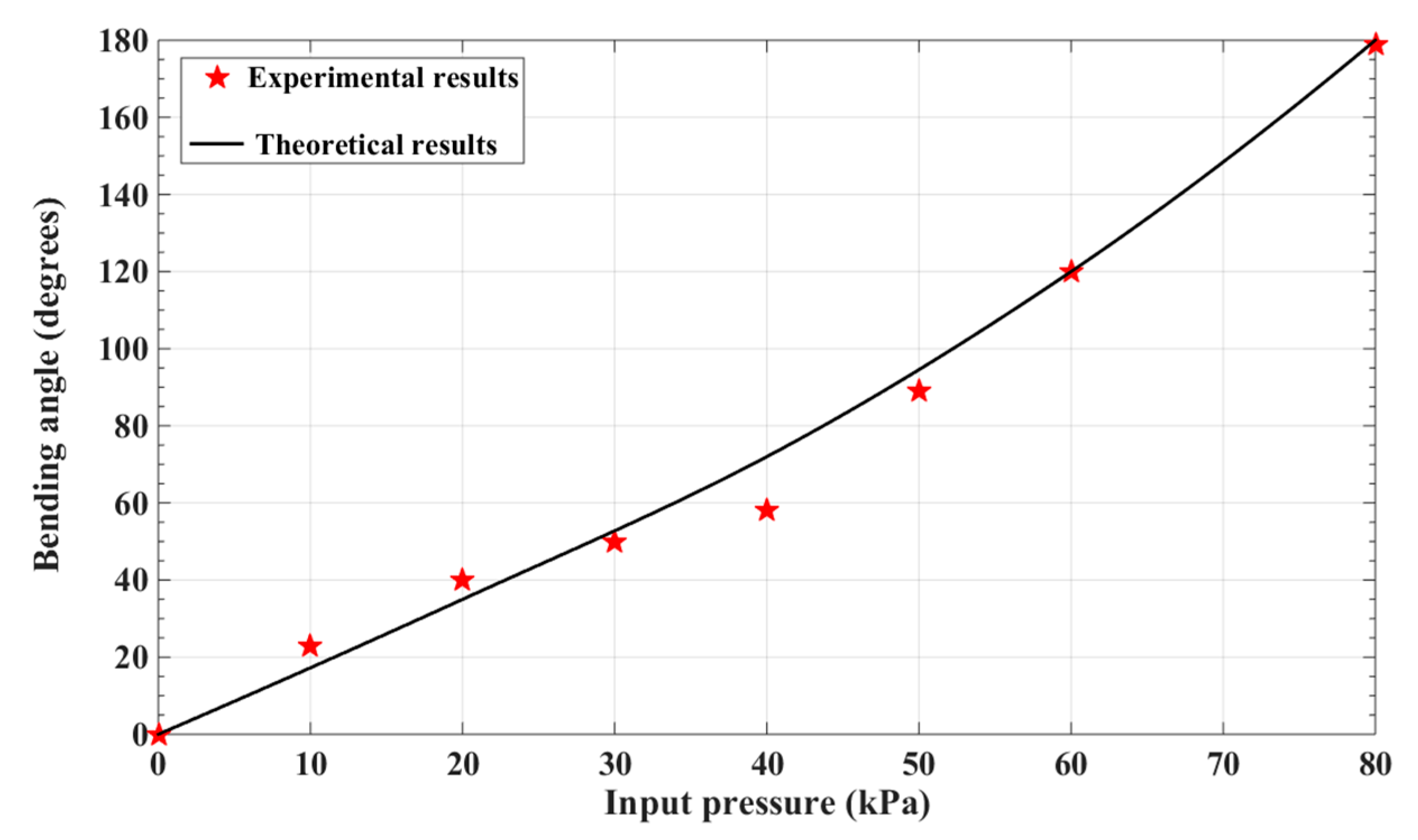
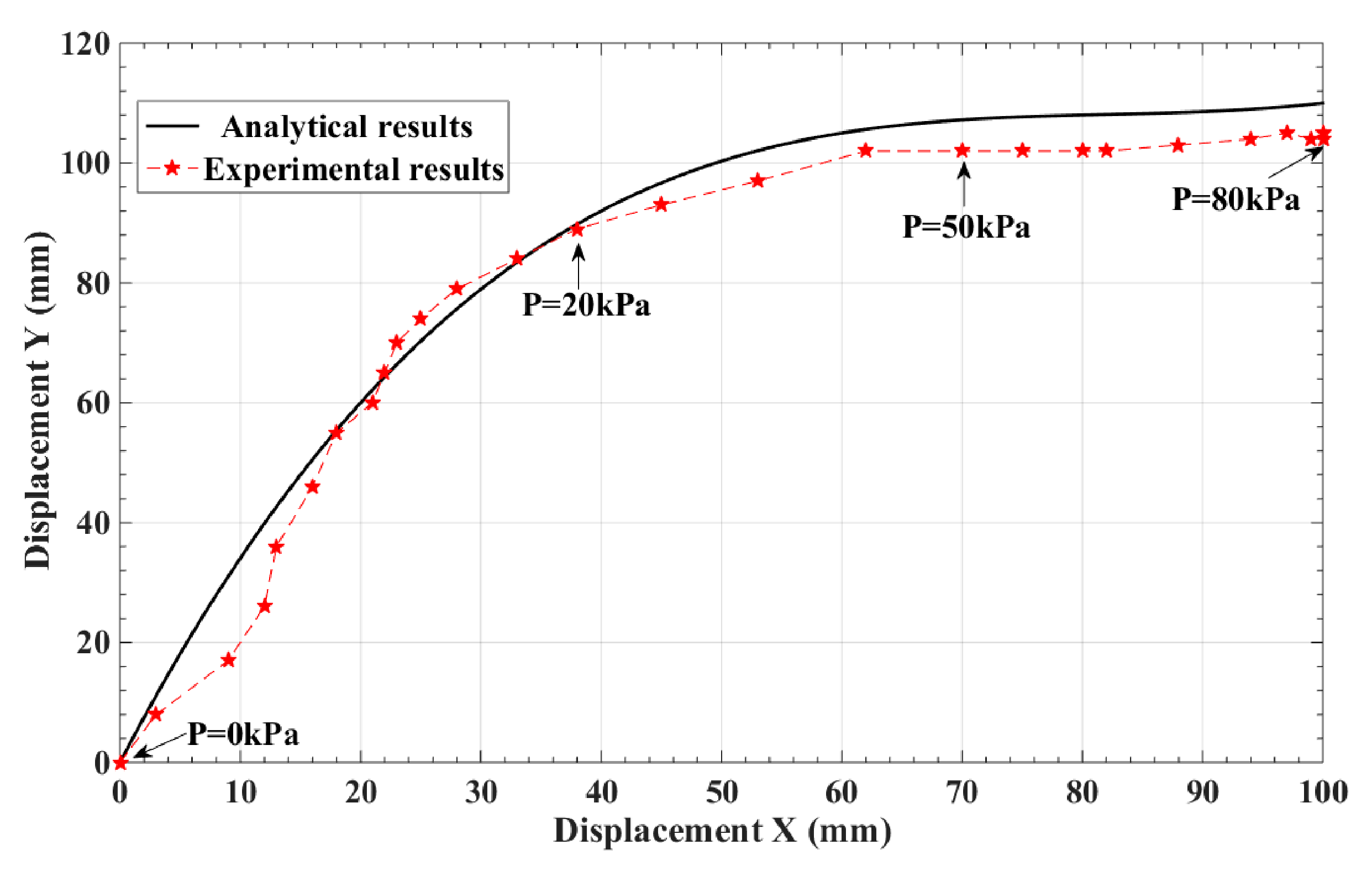
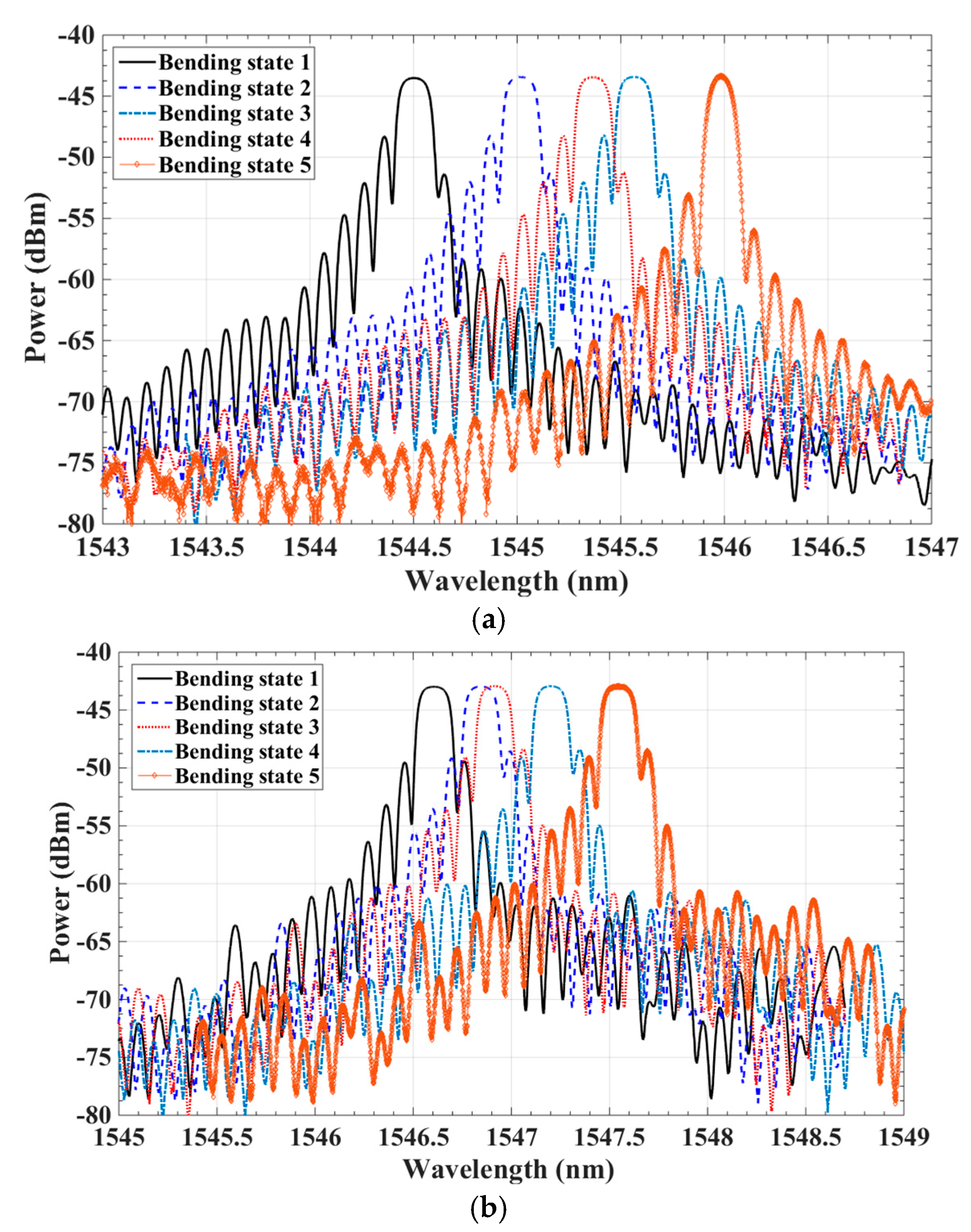
4.1. Pressure and Bending Angle
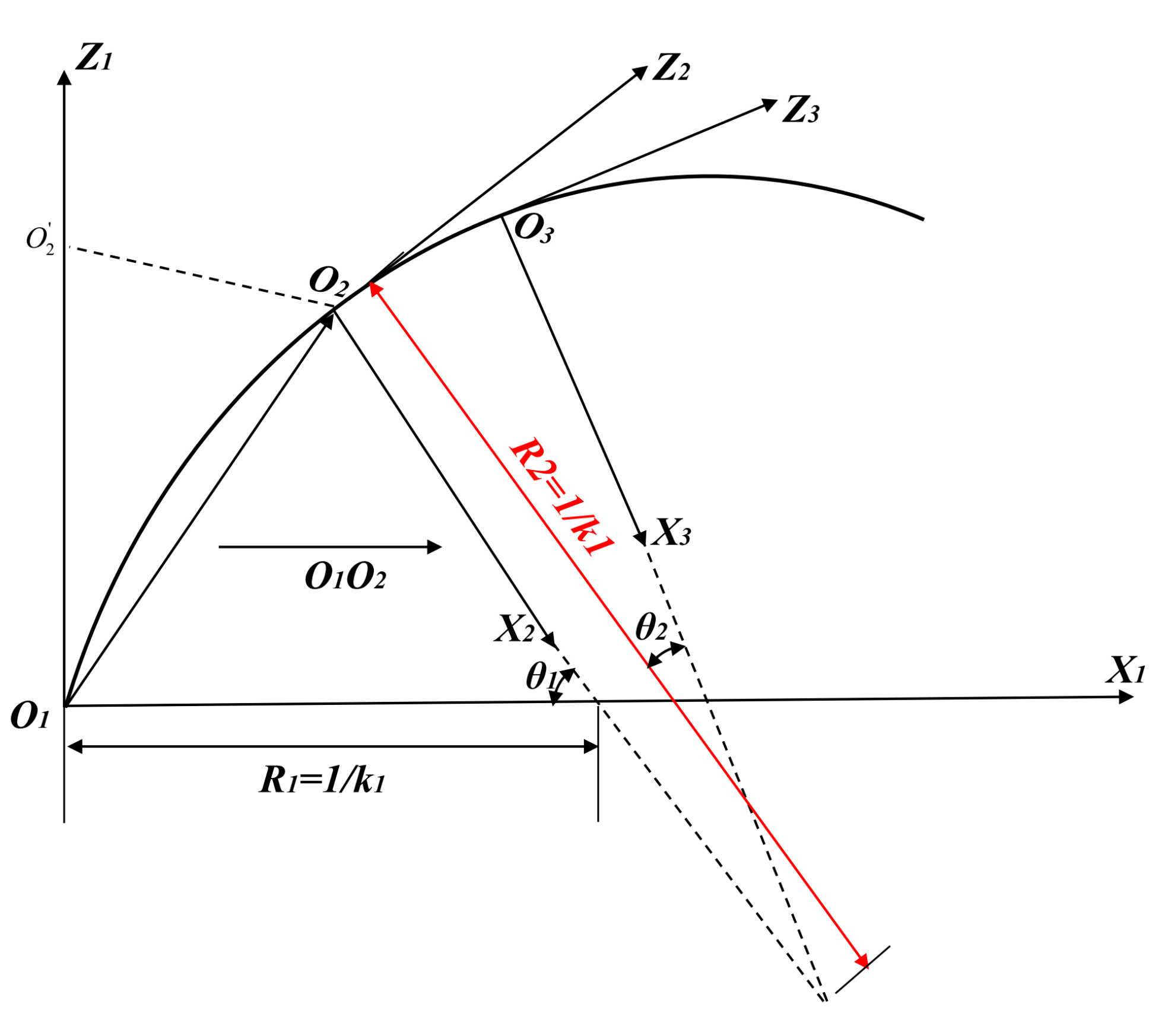
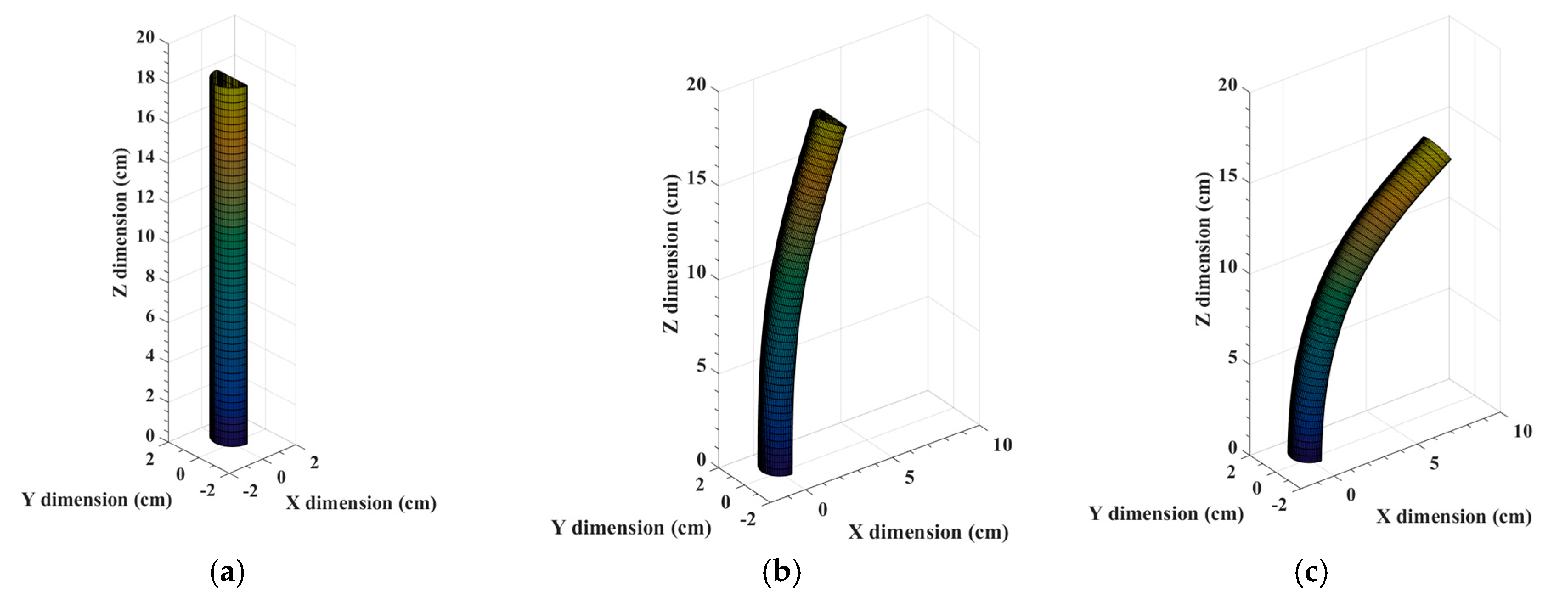
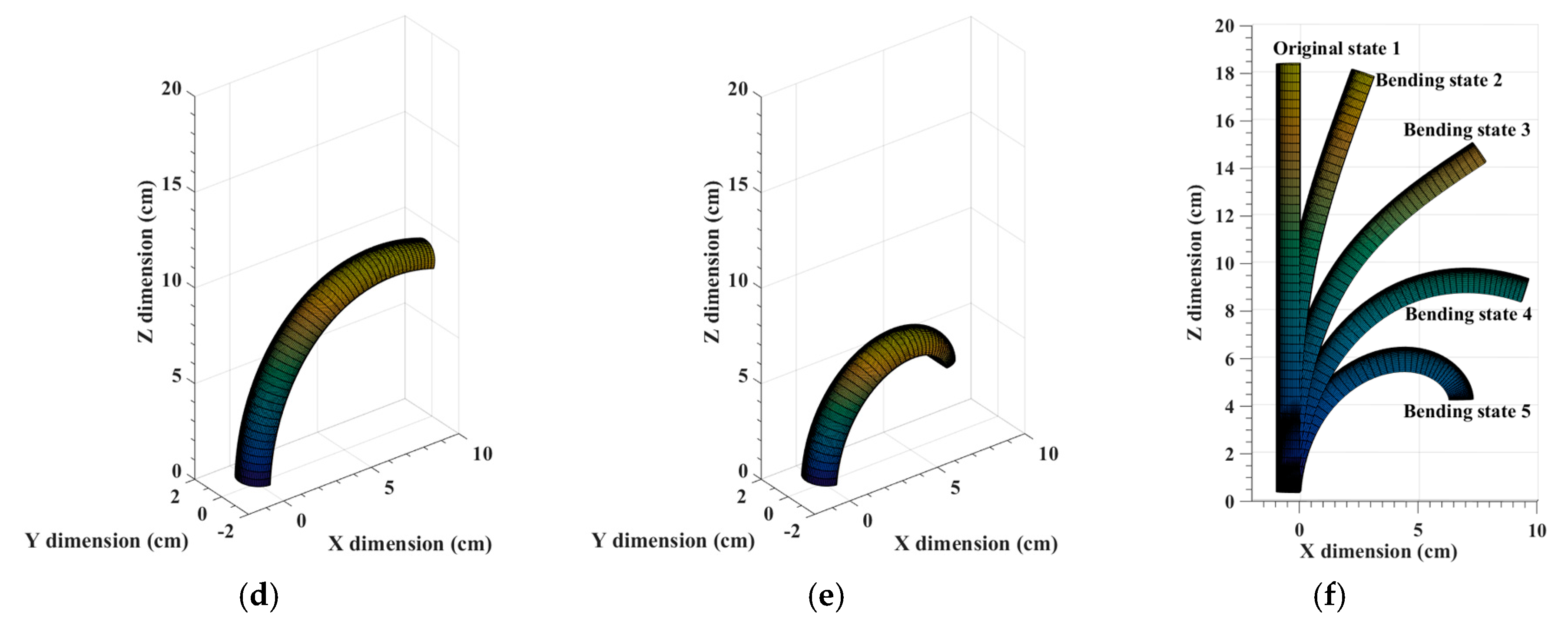
4.2. Shape Reconstruction of the Soft Actuator
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Ranzani, T.; Gerboni, G.; Cianchetti, M.; Menciassia, A. A bioinspired soft manipulator for minimally invasive surgery. Bioinspir. Biomim. 2015, 10, 035008. [Google Scholar] [CrossRef] [PubMed]
- Zolfagharian, A.; Kouzani, A.Z.; Khoo, S.Y.; Moghadam, A.A.A.; Gibson, L.; Kaynak, A. Evolution of 3D printed soft actuators. Sens. Actuators A Phys. 2016, 250, 258–272. [Google Scholar] [CrossRef]
- Luo, M.; Skorina, E.H.; Tao, W.; Chen, F.C.; Ozel, S.; Sun, Y.N.; Onal, C.D. Toward modular soft robotics: Proprioceptive curvature sensing and sliding mode control of soft bidirectional bending modules. Soft Robot. 2017, 4, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Polygerinos, P.; Wang, Z.; Overvelde, J.T.B.; Galloway, K.C.; Wood, R.J.; Bertoldi, K.; Walsh, C.J. Modeling of soft fiber-reinforced bending actuators. IEEE Trans. Robot. 2015, 31, 778–789. [Google Scholar] [CrossRef]
- Sun, G.; Li, H.; Dong, M.; Lou, X.; Zhu, L. Optical fiber shape sensing of polyimide skin for a flexible morphing wing. Appl. Opt. 2018, 56, 9325. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, T.D.; Han, H.S.; Shin, H.Y.; Nguyen, C.T.; Phung, H.; Hoang, H.V.; Choi, H.R. Highly sensitive flexible proximity tactile array sensor by using carbon micro coils. Sens. Actuators A Phys. 2017, 266, 166–177. [Google Scholar] [CrossRef]
- Ozel, S.; Keskin, N.A.; Khea, D.; Onal, C.D. A precise embedded curvature sensor module for soft-bodied robots. Sens. Actuators A Phys. 2015, 236, 349–356. [Google Scholar] [CrossRef]
- Wang, H.S.; Zhang, R.X.; Chen, W.D.; Liang, X.W. Shape detection algorithm for soft manipulator based on Fiber Bragg Gratings. IEEE/ASME Trans. Mechatron. 2016, 21, 2977–2981. [Google Scholar] [CrossRef]
- Payo, I.; Feliu, V.; Cortazar, O.D. Fibre Bragg grating (FBG) sensor system for highly flexible single-link robots. Sens. Actuators A Phys. 2009, 150, 24–39. [Google Scholar] [CrossRef]
- Ge, J.; James, A.E.; Li, X.; Chen, Y.; Kwok, K.W.; Fok, M.P. Bidirectional soft silicone curvature sensor based on off-centered embedded fiber bragg grating. IEEE Photonics Technol. Lett. 2016, 28, 2237–2240. [Google Scholar] [CrossRef]
- Kim, S.W.; Kang, W.R.; Jeong, M.S.; Lee, I.; Kwon, I.B. Deflection estimation of a wind turbine blade using FBG sensors embedded in the blade bonding line. Smart Mater. Struct. 2013, 22, 1–11. [Google Scholar] [CrossRef]
- Silva, A.S.; Catarino, A.; Correia, M.V.; Frazão, O. Design and characterization of a wearable macro bending fibre optic sensor for human joint angle determination. Opt. Eng. 2013, 52, 992–999. [Google Scholar] [CrossRef]
- Searle, T.C.; Althoefer, K.; Seneviratne, L.; Liu, H.B. An optical curvature sensor for flexible manipulator. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013; pp. 4415–4420. [Google Scholar] [CrossRef]
- Sareh, S.; Noh, Y.; Li, M.; Ranzani, T.; Liu, H.B.; Althoefer, K. Macrobend optical sensing for pose measurement in soft robot arms. Smart Mater. Struct. 2015, 24, 125024. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Jalving, J.; Huang, R.K.; Knepper, R.; Ruina, A.; Shepherd, R. A helping hand: Soft orthosis with integrated optical strain sensors and EMG control. IEEE Robot. Autom. Mag. 2016, 23, 55–64. [Google Scholar] [CrossRef]
- Connolly, F.; Walsh, C.J.; Bertoldi, K. Automatic design of fiber-reinforced soft actuators for trajectory matching. Proc. Natl. Acad. Sci. USA 2017, 114, 51–56. [Google Scholar] [CrossRef] [PubMed]
- Polygerinos, P.; Wang, Z.; Galloway, K.C. Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Autonom. Syst. 2015, 73, 135–143. [Google Scholar] [CrossRef] [Green Version]
- Ranzani, T.; Cianchetti, M.; Gerboni, G.; De Falco, I.; Menciassi, A. A soft modular manipulator for minimally invasive surgery: Design and characterization of a single module. IEEE Trans. Robot. 2016, 32, 187–200. [Google Scholar] [CrossRef]
- Laschi, C.; Mazzolai, B.; Cianchetti, M. Soft robotics: Technologies and systems pushing the boundaries of robot abilities. Sci. Robot. 2016, 1, 3690. [Google Scholar] [CrossRef]
- Zhao, Z.; Soto, M.A.; Tang, M.; Thevenaz, L. Distributed shape sensing using Brillouin scattering in multi-core fibers. Opt. Express 2016, 24, 25211–25223. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.J.; Liu, X.Y.; Jiang, N.; Yetisen, A.K.; Yuk, H.; Yang, C.X.; Khademhosseini, A.; Zhao, X.H.; Yun, S.-H. Highly stretchable, strain sensing hydrogel optical fibers. Adv. Mater. 2016, 28, 10244–10249. [Google Scholar] [CrossRef] [PubMed]
- Qiu, Y.; Shen, L.; Hu, W. Shape rebuilding and positioning method of search and rescue robot endoscope in ruin crack. Chin. J. Sci. Instrum. 2015, 36, 2782–2789. [Google Scholar]
- Robertson, M.A.; Paik, J. New soft robots really suck: Vacuum-powered systems empower diverse capabilities. Sci. Robot. 2017, 2, 1–11. [Google Scholar] [CrossRef]
- Cianchetti, M.; Ranzani, T.; Gerboni, G.; Nanayakkara, T.; Althoefer, K.; Dasgupta, P.; Menciassi, A. Soft robotics technologies to address shortcomings in today’s minimally invasive surgery: The stiff-flop approach. Soft Robot. 2014, 1, 122–131. [Google Scholar] [CrossRef]
- Wang, Y.; Negahdaripour, S.; Aykin, M.D. Calibration and 3D reconstruction of underwater objects with non-single view projection model by structured light stereo imaging. Appl. Opt. 2016, 55, 6564–6575. [Google Scholar] [CrossRef] [PubMed]
- Westbrook, P.S.; Kremp, T.; Feder, K.S.; Ko, W.; Monberg, E.M.; Wu, H.C.; Simoff, D.A.; Taunay, T.F.; Ortiz, R.M. Continuous multicore optical fiber grating arrays for distributed sensing applications. J. Lightw. Technol. 2017, 35, 1248–1252. [Google Scholar] [CrossRef]
- Parent, F.; Loranger, S.; Mandal, K.K.; Iezzi, V.L.; Lapointe, I.; Boisvert, J.S.; Baiad, M.D.; Kadoury, S.; Kashyap, R. Enhancement of accuracy in shape sensing of surgical needles using optical frequency domain reflectometry in optical fibers. Biomed. Opt. Express 2017, 8, 2210–2221. [Google Scholar] [CrossRef] [PubMed]
- Waltermann, C.; Doering, A.; Kohring, M.; Angelmahr, M.; Schade, W. Cladding waveguide gratings in standard single-mode fiber for 3D shape sensing. Opt. Lett. 2015, 40, 3109–3112. [Google Scholar] [CrossRef] [PubMed]
- Feng, D.Y.; Zhou, W.J.; Qiao, X.G.; Albert, J. Compact optical fiber 3D shape sensor based on a pair of orthogonal titled fiber bragg gratings. Sci. Rep. 2015, 17415. [Google Scholar] [CrossRef] [PubMed]
- Song, S.; Li, Z.; Yu, H.; Ren, H. Electromagnetic positioning for tip tracking and shape sensing of flexible robots. IEEE Sens. J. 2015, 15, 4565–4575. [Google Scholar] [CrossRef]
- Quandt, B.M.; Fan, L.J.H.; Qian, J. Vibration shape testing of space sheet structure. J. Shanghai Univ. 2000, 14, 354–358. [Google Scholar]
- Lee, K.K.C.; Mariampillai, A.; Haque, M.; Standish, B.A.; Yang, V.X.D.; Herman, P.R. Temperature-compensated fiber-optic 3D shape sensor based on femtosecond laser direct-written Bragg grating waveguides. Opt. Express 2013, 21, 24076–24086. [Google Scholar] [CrossRef] [PubMed]














© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Zhu, L.; Sun, G.; Yu, M.; Dong, M. Design, Measurement and Shape Reconstruction of Soft Surgical Actuator Based on Fiber Bragg Gratings. Appl. Sci. 2018, 8, 1773. https://doi.org/10.3390/app8101773
He Y, Zhu L, Sun G, Yu M, Dong M. Design, Measurement and Shape Reconstruction of Soft Surgical Actuator Based on Fiber Bragg Gratings. Applied Sciences. 2018; 8(10):1773. https://doi.org/10.3390/app8101773
Chicago/Turabian StyleHe, Yanlin, Lianqing Zhu, Guangkai Sun, Mingxin Yu, and Mingli Dong. 2018. "Design, Measurement and Shape Reconstruction of Soft Surgical Actuator Based on Fiber Bragg Gratings" Applied Sciences 8, no. 10: 1773. https://doi.org/10.3390/app8101773
APA StyleHe, Y., Zhu, L., Sun, G., Yu, M., & Dong, M. (2018). Design, Measurement and Shape Reconstruction of Soft Surgical Actuator Based on Fiber Bragg Gratings. Applied Sciences, 8(10), 1773. https://doi.org/10.3390/app8101773