1. Introduction
Thin-walled structures are commonly used in civil, aeronautical, and mechanical engineering structures. For simplicity and computational efficiency, one-dimensional theories are preferred to two- and three-dimensional models. However, the development of an efficient one-dimensional theory faces a fundamental challenge of finding a general and simple procedure to determine the cross-section deformation modes capable of describing cross-section in-plane (distortion) and out-of-plane (warping) deformations [
1]. Moreover, the set of deformation modes should have a hierarchic capability, to obtain a reduced model and a clear physical interpretation of structural behaviors.
To support this, several trends of enhancing beam theories have been developed in the last decades. Yu and Hodges [
2,
3] developed an asymptotic method and contributed much to variational asymptotic beam sectional analyses. Expansion of the beam displacement field through Taylor or Maclaurin series is a general approach to model both thin-walled and solid structures, and has branched out to composite structures, due to the work of Carrera and Pagani [
4,
5]. Saint-Venant-driven models have been widely studied from the beginning, and new developments can be referred to Morandini et al. [
6], and Naccache and Fatmi [
7]. Umansky and Vlasov were the pioneers in the research of thin-walled structures. Vlasov [
8] established a general thin-walled beam theory with warping of open cross-sections considered. Warping of closed cross-sections was first described by Umansky [
9] in his study of non-uniformed torsion of thin-walled beams. Since then, refinement of their thin-walled theories has been extensively studied and generated many achievements, such as the recent work of Kim et al. [
10] and Kovvali et al. [
11]. Some special structural behaviors, exhibiting their importance in engineering, were also studied where shear deformation was considered. These include the studies of multi-cell distortion (Gonçalves et al. [
12]), warping due to shear-lag effects (Chen et al. [
13]) and other secondary effects (Lacidogna [
14], Seguy et al. [
15], Lacalle et al. [
16]). Additionally, there are also some studies focused on the physical interpretation of cross-section deformation modes [
17,
18].
Recently, the generalized beam theory (GBT) has been the subject of intense scholarly debate, which can accurately handle cross-section deformation stemming from the so-called GBT cross-section analysis. Since the groundbreaking work of Schardt [
19], GBT has been developed to account for both warping and distortion with shear deformation [
20] and transverse extension included; it has also been applied to multi-cell cross-sections [
21], composite materials [
22] and curved members [
23]. As a comparable theory, the beam model, based on generalized eigenvectors [
24,
25] has been obtained by considering a mixed Hellinger-Reissner variational formulation. Its sectional deformation modes have been defined through a cross-section discretization, using two-dimensional elements. Vieira et al. [
26,
27] have also recently proposed a remarkable higher-order one-dimensional model, which allows one to accurately reproduce three-dimensional behaviors of thin-walled structures. The key point is the application of a criterion to uncouple governing equations which have been established based on the solution of a generalized eigenvalue problem. In all fairness, the three theories mentioned above are powerful enough to deal with almost any arbitrary thin-walled cross-sections and any mechanical analyses (including static, dynamic, bulking, and so on), with an acceptable and optional precision. However, one common problem is the solution of the generalized eigenvalue problem, which is quite involved and demanding in uncoupling cross-sectional deformation modes. Actually, a simplified approach that does not include all the features but has a high precision, is more suitable, in some cases.
In this paper, a one-dimensional model of thin-walled structures is presented with a simplified approach to identify sectional deformation modes of prismatic cross-sections. The paper is organized as follows. First, the one-dimensional governing differential equation of a prismatic thin-walled member is obtained, in
Section 2. The cross-section analysis is then implemented, in
Section 3, producing a set of basis deformation modes. A procedure similar to combining like terms is carried out next to identify the final set of sectional deformation modes, based on the data of the modal analysis, in
Section 4. The derived sectional deformation modes are used to update the basis functions in the higher-order beam model. Subsequently, numerical examples are presented to validate the new approach, in
Section 5. Finally, the main conclusions are outlined.
3. Cross-Section Analysis
The proposed one-dimensional model considers the approximation of the displacement field over the cross-section, through the linear superposition of a set of basis functions. Each basis function is used to describe one type of contour deformation mode of the cross-section, such as torsion, bending, and flexure of conventional Timoshenko beam theory, under the assumptions of rigid perimeter and flat section. However, differing from solid structures, thin-walled members are prone to deform over the cross-section, and the resulted deformation plays an important influence which increases rapidly as the slenderness ratio decreases. Moreover, these deformation modes are complex with a view of various cross-section configurations. Therefore, an ideal thin-walled model is crucially dependent on the reasonable description of deformation modes. In this section, cross-section analysis has been carried out to explore an approach to identify sectional deformation modes of thin-walled structures, in reference to Bebiano et al. [
28] and Vieira et al. [
29].
3.1. Cross-Section Discretization
Deformation modes of a cross-section might be quite complex, but the potential displacement of each point, attached on the cross-section, is rather predictable. In this sense, it is natural to approximate cross-section deformation with nodal displacements, based on the cross-section discretization.
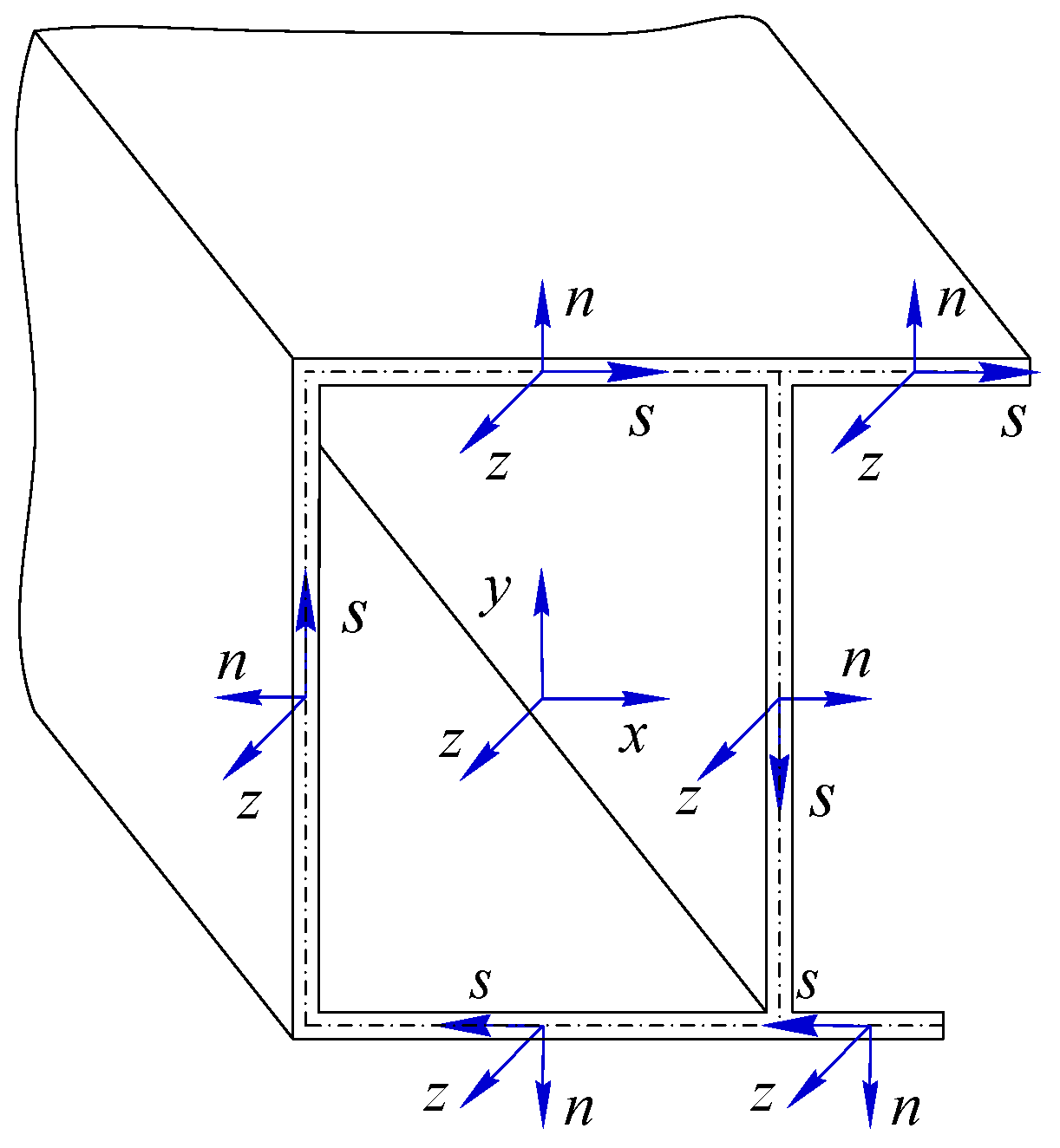
A prismatic thin-walled cross-section can be divided into a set of walls, connected by
mn natural nodes, which connects adjacent walls or locates at the free ends (see nodes 1, 2, 3, and 4 in
Figure 2a, and node 11 in
Figure 2b, respectively). Since these walls may greatly vary in length, appropriate node refinement will contribute to the capability of capturing cross-section deformation from the view-point of interpolation. Therefore, a selective number
mi of the intermediate nodes (see nodes 5, 6, 7, and 8 in
Figure 2a), located between the two natural nodes, have been introduced to further divide these walls into linear segments. The set of natural and intermediate nodes have defined the cross-section discretization.
Figure 2b shows the cross-section discretization adopted for the thin-walled structure depicted in
Figure 1. Unlike the way illustrated in
Figure 2a, two intermediate nodes were located between natural nodes 1 and 2 in
Figure 2b. Moreover, there was no intermediate node on the branch. The differences stem from the experience that longer walls deform more complexly. This was also an enhancement for capturing cross-section deformation with a reduced dimension. Since the discretization was performed without any restrictions on geometry, one could reasonably assume that any prismatic cross-section could be handled as they should be.
3.2. Basis Deformation Modes
In order to implement the interpolation process, nodal displacements should be properly defined first. Here four degrees of freedom of each node are discussed, including three translations and one rotation about the longitudinal axis. Consequently, the cross-section discretization led to a total of 4 × (
mn +
mi) potential deformation patterns. In theory, these deformation patterns could be superposed with these nodal displacements. The problem is that the linear independency and structural meaning could not be guaranteed before a guideline was appropriately proposed. To settle the matter, a measure in GBT [
28] was adopted here, which considered individually imposing a unit displacement on one of the four degrees of freedom of each node but with zero displacement on other nodes. The derived 4 × (
mn +
mi) deformation patterns might have been of no definite physical significance, but the whole set of these patterns, which were linearly independent, could express any one of the 4 × (
mn +
mi) potential cross-section deformation patterns with a linear superposition. In this sense, one deformation pattern resulted from the imposing of a unit displacement could be designated as one basis of the deformation mode.
The basis function adopted in Equation (2) could be viewed as the mathematical description of a basis deformation mode. The function was to be approximated with interpolation polynomials subsequently. In consideration of their partial differential orders in Equation (11), different approximation functions were adopted. These included, a set of linear Lagrange functions for the axial (out-of-plane) and tangential (in-plane) displacements, and a set of cubic Hermite functions for the normal (in-plane) component. These basis functions vary along the midline coordinate s. As mentioned above, φk(s) and ψk(s) were in the form of linear Lagrange functions, while ωk(s) was described with cubic Hermite functions.
It should be pointed out that the different measures were separately taken for natural and intermediate nodes in the approximation, since they played different roles. For a natural node
i, a unit displacement was imposed on it, but null displacements were imposed on all the other natural nodes. The basis functions might have varied within each wall containing node
i but were null in all the other walls. For an intermediate node
j, the basis function matched the imposition of a unit displacement on node
j but matched the null displacements, on all other nodes. This means that the functions varied within the two segments adjacent to node
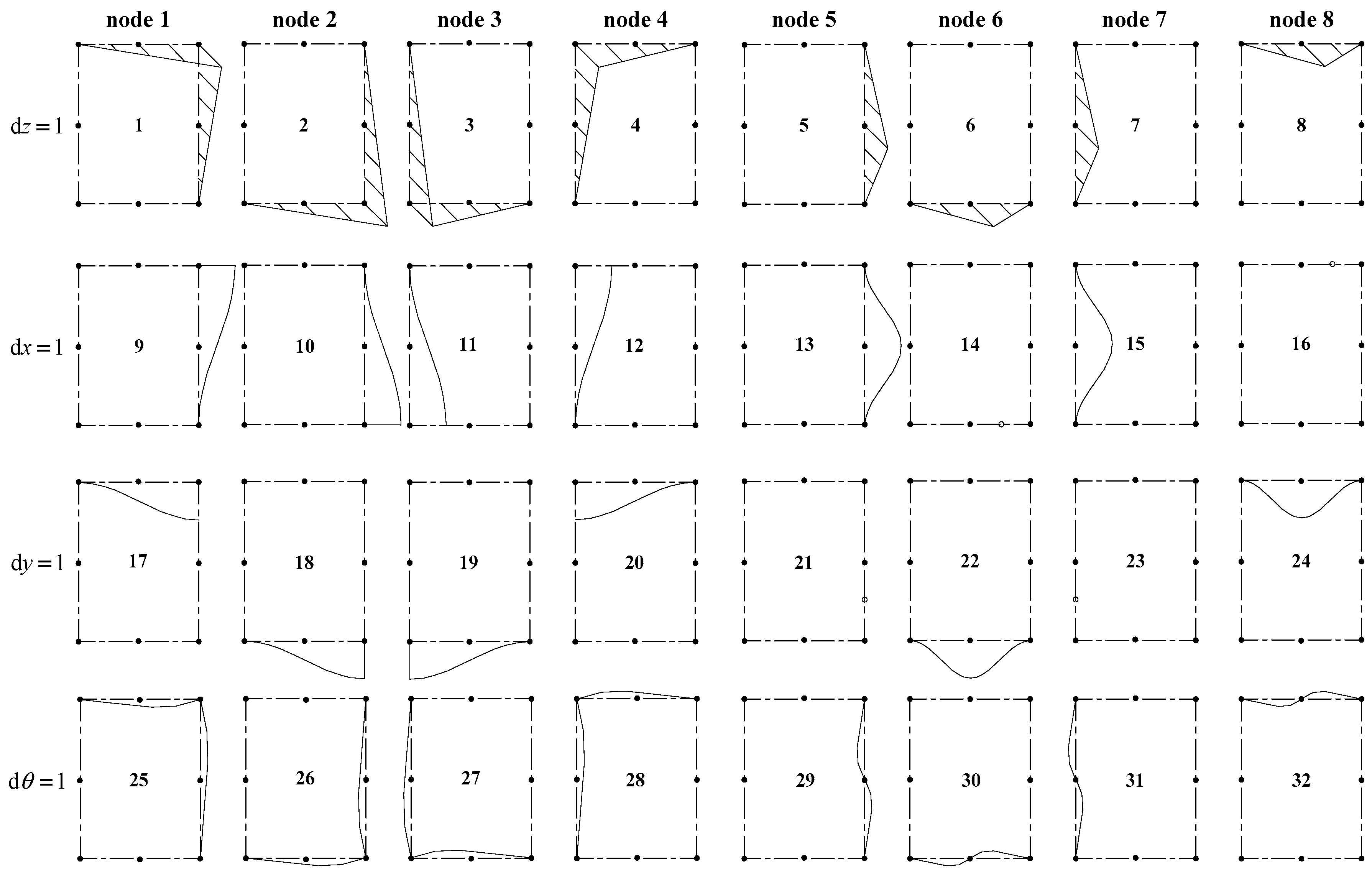
j but were null elsewhere. According to the above guideline,
N = 4 × (
mn +
mi) = 32 basis deformation modes were obtained for the cross-section in
Figure 2a. As shown in
Figure 3, among the thirty-two modes arrayed in a 4 × 8 matrix, each of the 4 rows were derived with an imposed unit displacement on eight nodes, while each of the eight columns represented the deformation modes that resulted from four unit displacements, separately imposed on one node. In the approximation of their deformation shapes, cubic Hermite functions were applied for the normal displacements, and linear functions for the tangential component (the 2rd~4th rows), while the normal displacements were interpolated with the linear Lagrange functions (the first row).
4. Sectional Deformation Modes
The basis deformation modes above were established on the basis of purely kinematic concepts. Though they could serve as basis functions in Equation (2), the problem lied in that their large amount of deformation modes made for a non-reduced model and that the physical interpretation was not intuitive enough to couple with the beam structural behaviors. A set of final deformation modes, which exhibited well-defined structural significance and ranked hierarchically, according to their participations, was very important for a one-dimensional higher-order model. In this section, a procedure to assemble basis deformation modes was developed, similar to the concept of combining like terms in algebra.
This procedure was based on the assumption of considering the cross-section deformation in dynamic systems as the supposition of rigid displacement and elastic deformation of the cross-section, whose amplitudes vary along the longitudinal axis, with a fixed proportion relationship. In this sense, the participation of each basis deformation mode in a final sectional deformation mode can be determined with the data extracted from the modal shapes of certain cross-sections which were derived from the presented model. For convenience, the object cross-section always chose the free end of a cantilevered thin-walled structure, in free vibration. Its slenderness ratio needed to be kept between three and six, since thin-walled structures (
Figure 4), in this range, are prone to perform more obvious cross-sectional deformation (see Zhu et al. [
30]).
Take the structure in
Figure 4 as an example to demonstrate the process. Substituting the set of basis functions shown in
Figure 3 into the presented model and employing the boundary conditions in
Figure 4, the dynamic model of the thin-walled structure was established for modal analysis. The model was solved in MATLAB with the first few modal shapes extracted and participations of each basis deformation mode obtained for subsequent use. It should be noted that the number of modal shapes to be studied was related to the required number of final deformation modes, which largely influenced the accuracy of the proposed model. In most cases, four to eight modal shapes were essential and might have been enough for thin-walled structures with simple cross-sections.
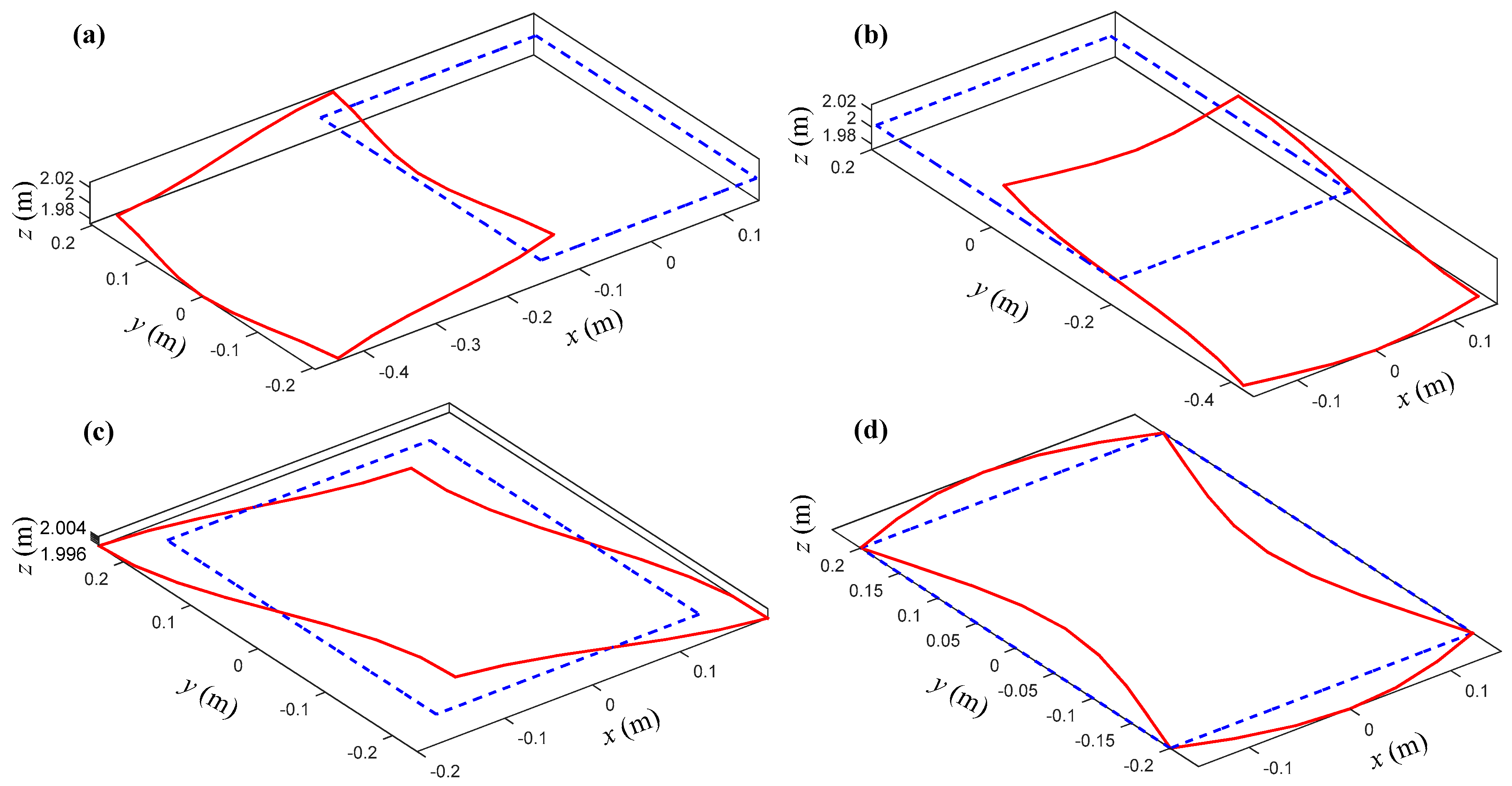
Figure 5 shows the deformed cross-section of the free end for the first 4 modals, where the blue curves indicate an undeformed cross-section and the red ones describe a deformed cross-section. The
x and
y axes spanned the cross-section plane, while
z axis dedicated the cross-section deformation along the longitudinal direction.
For the ease of implementation, basis deformation modes were separated into in-plane and out-of-plane ones, which were to be extracted from the four modal shapes illustrated in
Figure 5. In fact, the procedure could be completed to solve the free vibration system, by applying the proposed finite element, since its feature of variable separation, and the amplitudes of each basis deformation mode participating in the modal shapes were obtained simultaneously.
Figure 6 demonstrated the amplitudes of basis deformation modes for the first modal of the cantilevered structure.
In
Figure 6, the eight amplitudes on the left, corresponded to the out-of-plane mode family, while the twenty-four on the right represented the participations of the in-plane mode family (in accordance with the sequence shown in
Figure 3). Here the sign of amplitude value stood for whether the contributing deformation was identical with the predicted positive direction shown in
Figure 3. Among each family, a process similar to combining like terms was carried out to linearly superpose basis deformation modes, with equal or opposite amplitudes. For example, among the out-of-plane family with non-null amplitudes in
Figure 6, modes 1~4 were like terms (with equal or opposite amplitude values), and so were modes 5 and 7, which were to be assembled together with their amplitudes, as corresponding weights. The assembled modes are designated as primary deformation modes. As shown in
Figure 7, two primary deformation modes were obtained through the process. Obviously, the former represented a rigid rotation of the whole cross-section about
y-axis. It is a conventional deformation mode in the beam theory of Timoshenko, and here it was numbered as sectional deformation mode I. The other mode was left alone and was numbered as sectional deformation mode V, which represents the first warping deformation (out-of-plane distortion caused by uneven longitudinal extensions, see Carpinteri et al. [
31]) of the cross-section. The case confirmed that a modal shape of a thin-walled structure might be a mixture of rigid displacement and elastic deformation of the cross-section.
It should be pointed out that not all primary sectional deformation modes could be identified as final deformation mode. For example, among in-plane mode family demonstrated in
Figure 8, modes 1~4 were assembled as a conventional deformation mode representing a rigid translation of the cross-section, being numbered as sectional deformation mode VIII, but not for the rest of the primary deformation modes i, ii and iii (named as secondary deformation modes describing elastic deformation profile of the cross-section). These secondary modes were of no clear physical significance and might not be efficient for a reduced model. For this reason, the three secondary modes were assembled again to form a final distortion mode. This new mode, like the first distortion mode, was associated with rigid translation of the cross-section, along the
x-axis and could also be observed in actual experiments. In this sense, it was endued with structural meaning, and numbered as sectional deformation mode XI.
In this way, a total of 14 final sectional deformation modes were identified through the “combining like terms” operation carried out on the first four modal shapes (as shown in
Figure 9). Among these modes, modes I, II, III, VIII, IX, and X corresponded to the conventional rigid displacements of the whole cross-section. The other eight modes were newly defined to describe elastic deformation of the cross-section with a minimum total. In general, these new deformation modes were structurally meaningful and linearly independent. Additionally, their arrangements were in accordance with the sequence they appeared in, which showed the capability of a hierarchy.
The proposed simplified approach, although involved with cross-section analysis, was different from both the theory of Camotim et al. [
28] for obtaining GBT deformation modes or that of Vieira et al. [
29] for formulating the higher order model. Both of these theories have to solve the generalized eigenvalue problem to uncouple the governing differential equations or the basis functions, which is quite demanding. In fact, the authors focused on avoiding this in the process of identifying sectional deformation modes. Instead, a process similar to combining like terms was developed in this paper to assemble basis deformations according to their participations in the constitution of sectional deformation modes. This approach lowered the requirements of mathematical theory and computation load. Additionally, the corresponding process could naturally separate conventional deformation modes from warping and distortion of the cross-section, being propitious to the compatibility with classical beam theories.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}