5.2. Test Cases: Common Situation
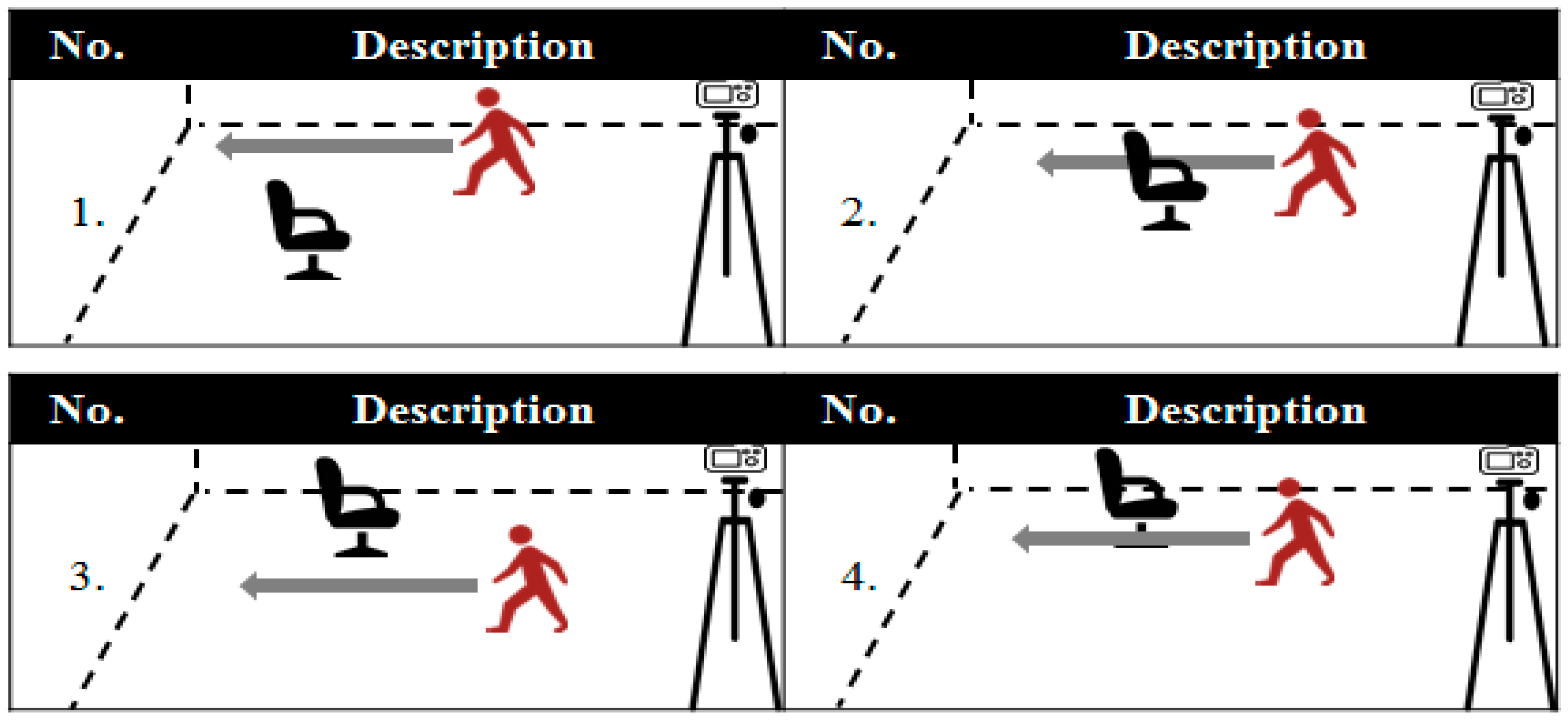
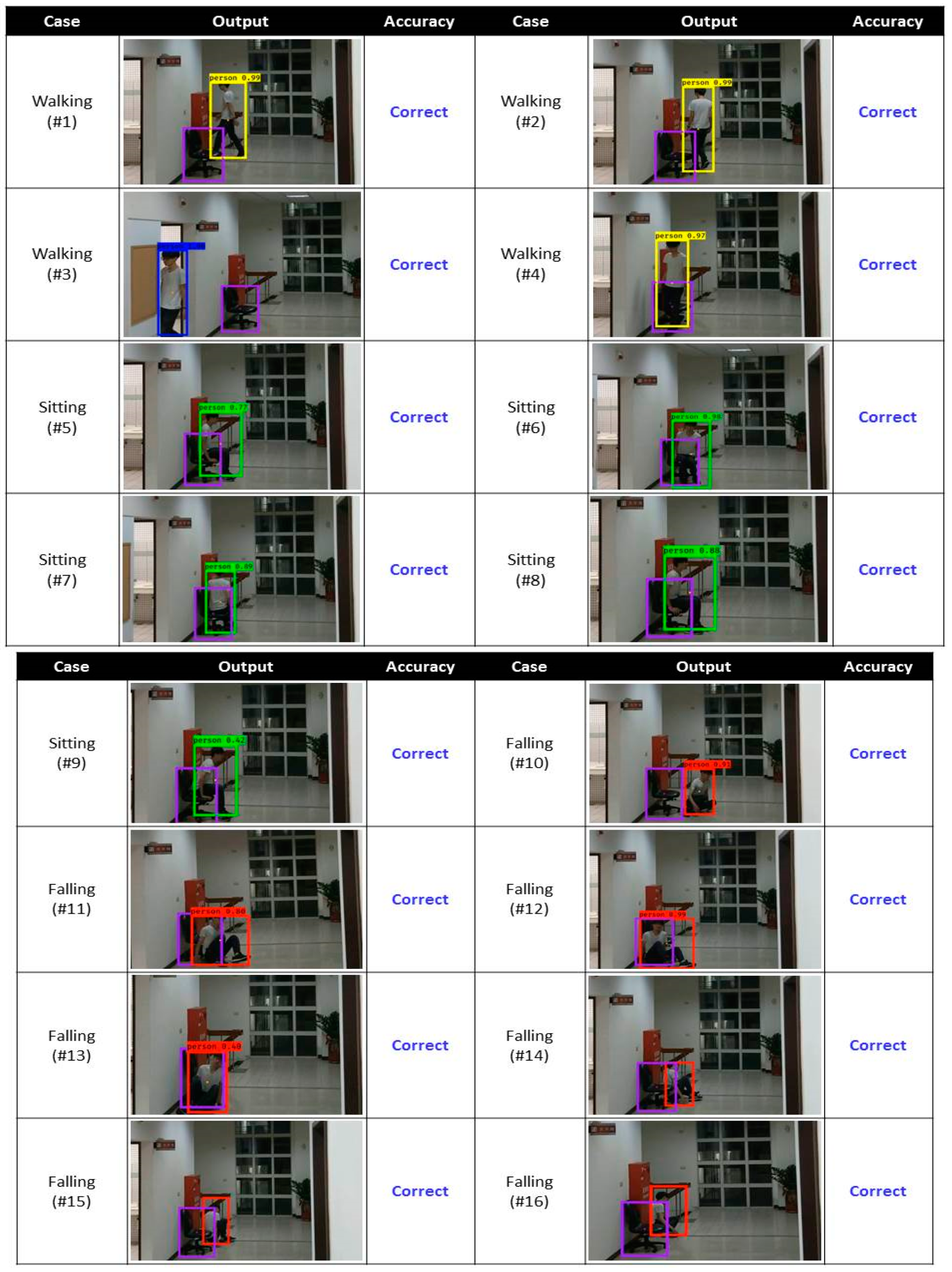
For the common situation, there are three tests. There are 23 cases in each test, including 9 non-fall cases and 14 fall cases. Case 1 to Case 4 in the non-fall cases are walking cases to verify that IFADS does not detect a fall while the tester is walking.
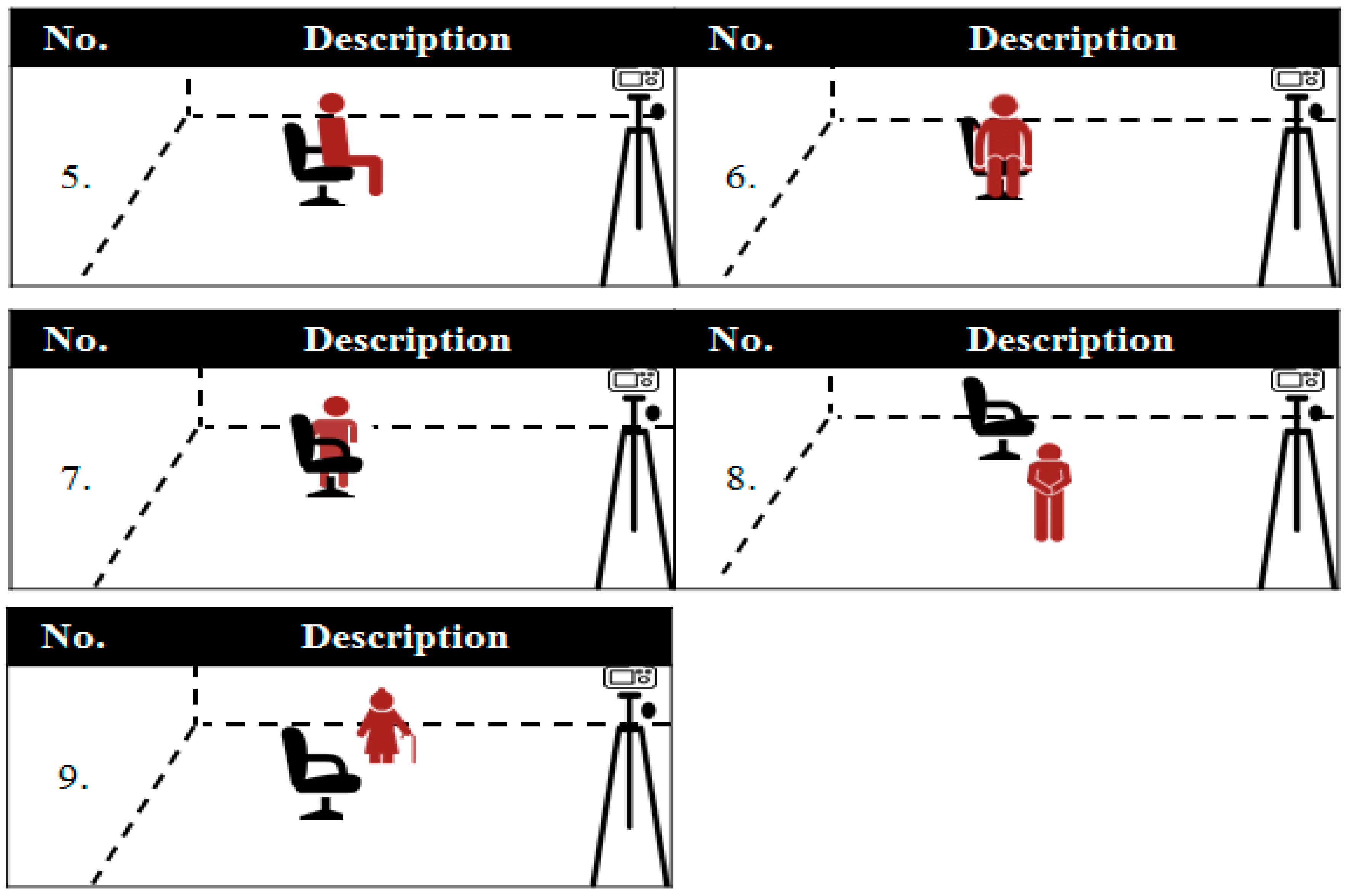
Figure 6 shows the illustration of the walking cases. Case 1 and Case 2 both show that the tester walks across behind the chair, and the tester is far from the chair in Case 1 and near the chair in Case 2. Case 3 and Case 4 are both situations where the tester walks across in front of the chair, and the tester is far from the chair in Case 3 and near the chair in Case 4. On the other hand, Case 5 to Case 9 in the non-fall cases are sitting cases to verify that IFADS does not detect a fall while the tester is sitting with any rotation angle.
Figure 7 shows the illustration of the sitting cases. Cases 5, 6, and 7 are the situations where the tester faces the chair, walks to the chair, sits, and then stands up and walks away. The difference between these cases is that the tester has his/her back to the chair, faces the camera, and turns his/her back to the camera while sitting in Cases 5, 6, and 7, respectively. Case 8 is the situation where the tester walks to the chair with his/her back to the camera, sits, and then stands up and walks away. Case 9 is the situation where the tester walks to the chair while facing the camera, sits, and then stands up and walks away. From Case 10 to Case 23, there are 14 fall cases.
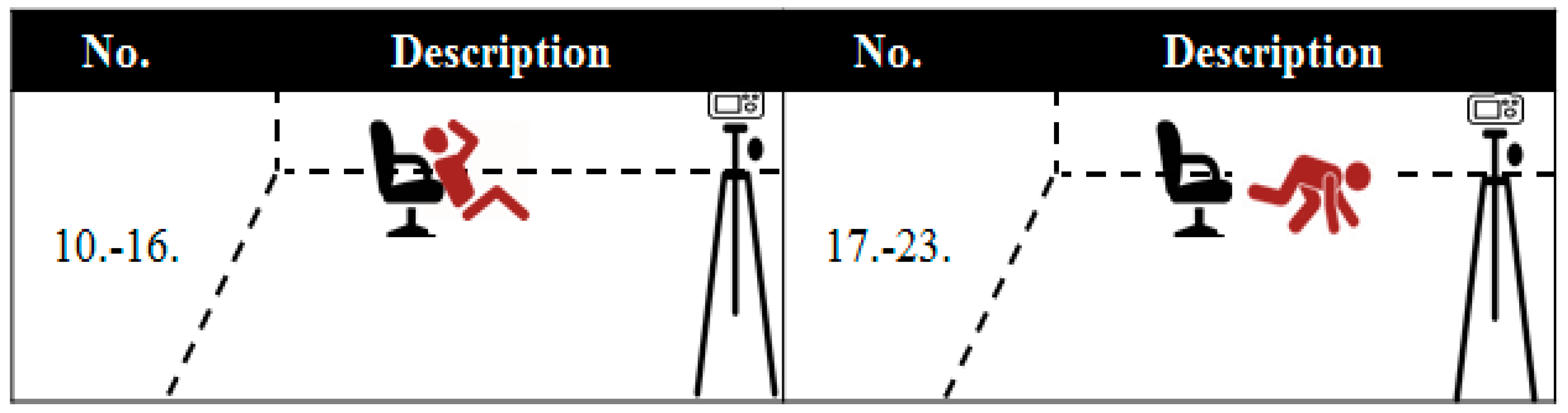
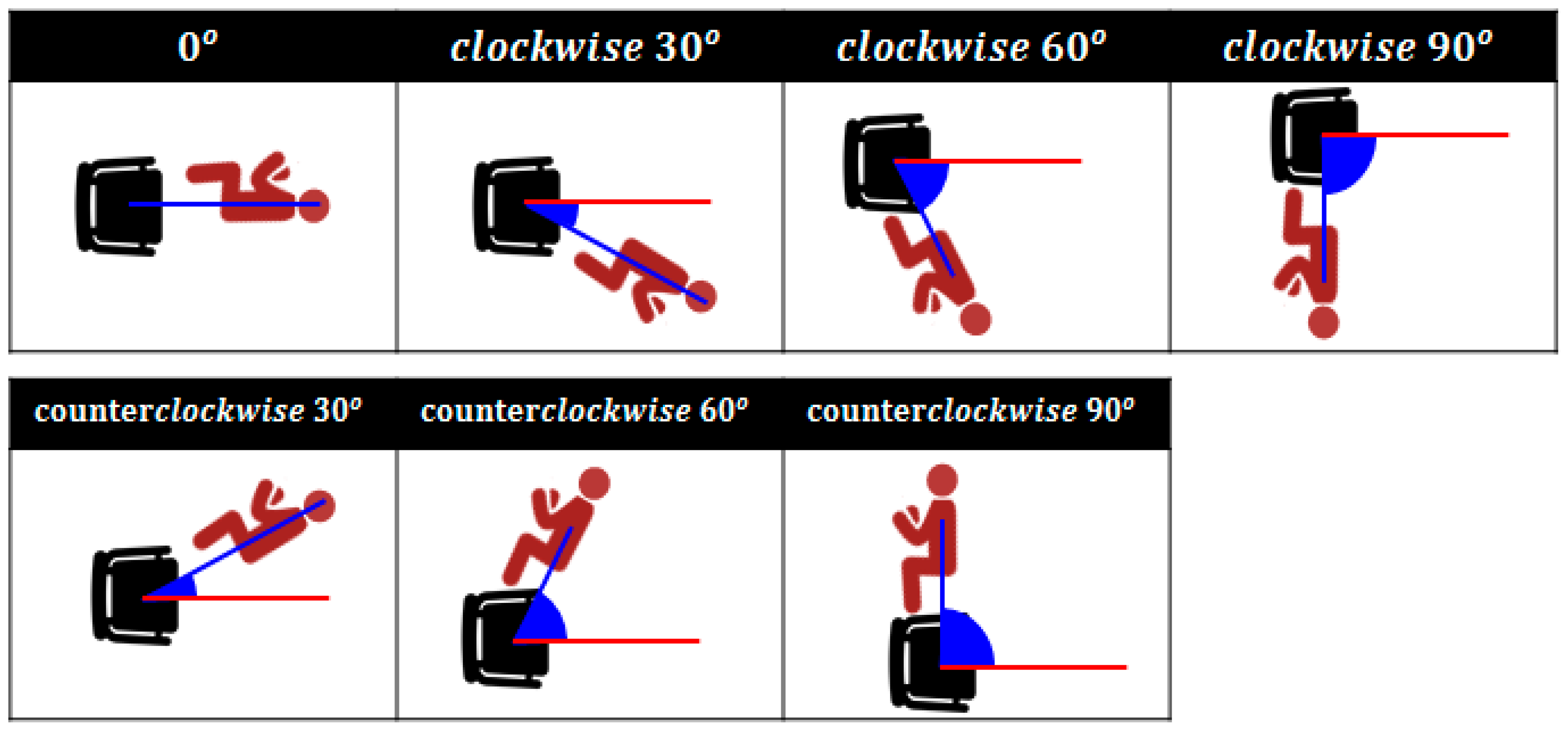
Figure 8 shows the illustration of the fall cases. From Case 10 to Case 16, the tester falls when he/she tries to sit on the chair, and from Case 17 to Case 23, the tester falls when he/she tries to stand up from the chair. The difference between these cases is that the rotation angle of the fall is different.
Figure 9 shows the different rotation angles of the fall. The purpose of these fall cases is to verify that IFADS can detect falls with different rotation angles and different postures.
For the experiment, first, we mark the chair purple. As
Table 2 shows, we mark the testers in different colors to distinguish between the different postures of the testers.
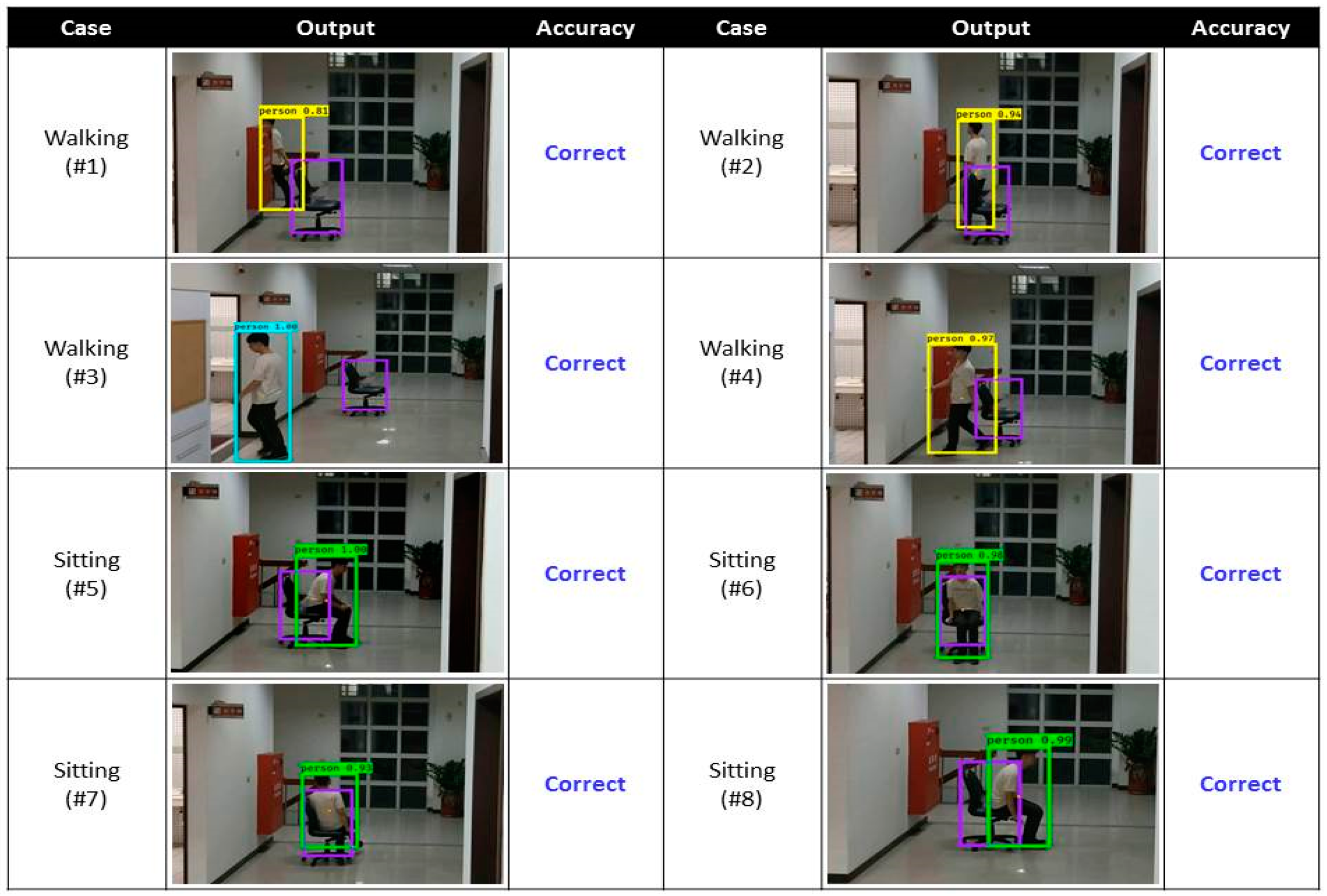
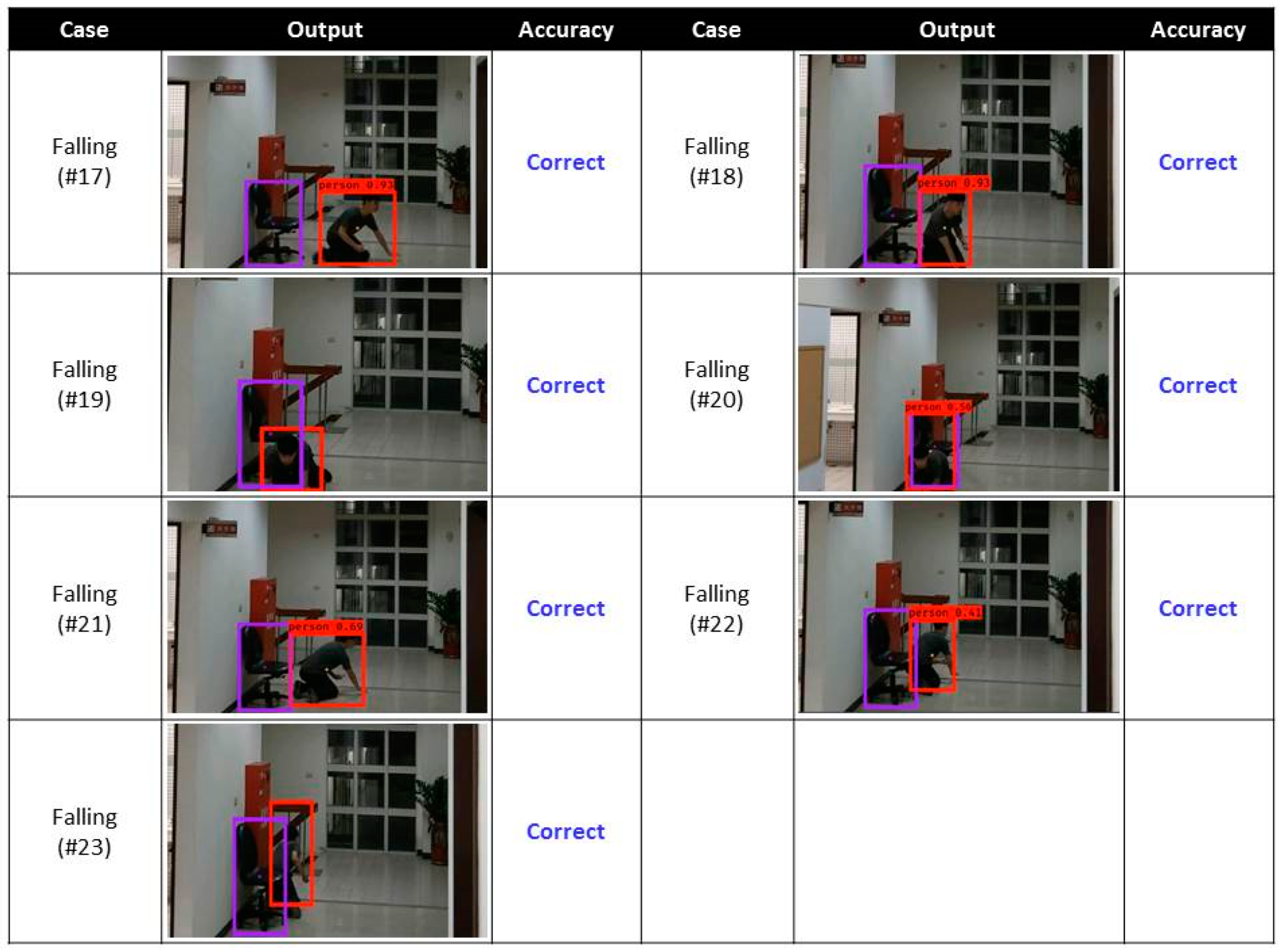
Figure 10 shows the remaining results of the common situation. Since the tester usually walks across (in front of or behind) the chair instead of sitting on the chair when he/she finds that there is a chair, from Case 1 to Case 4 in
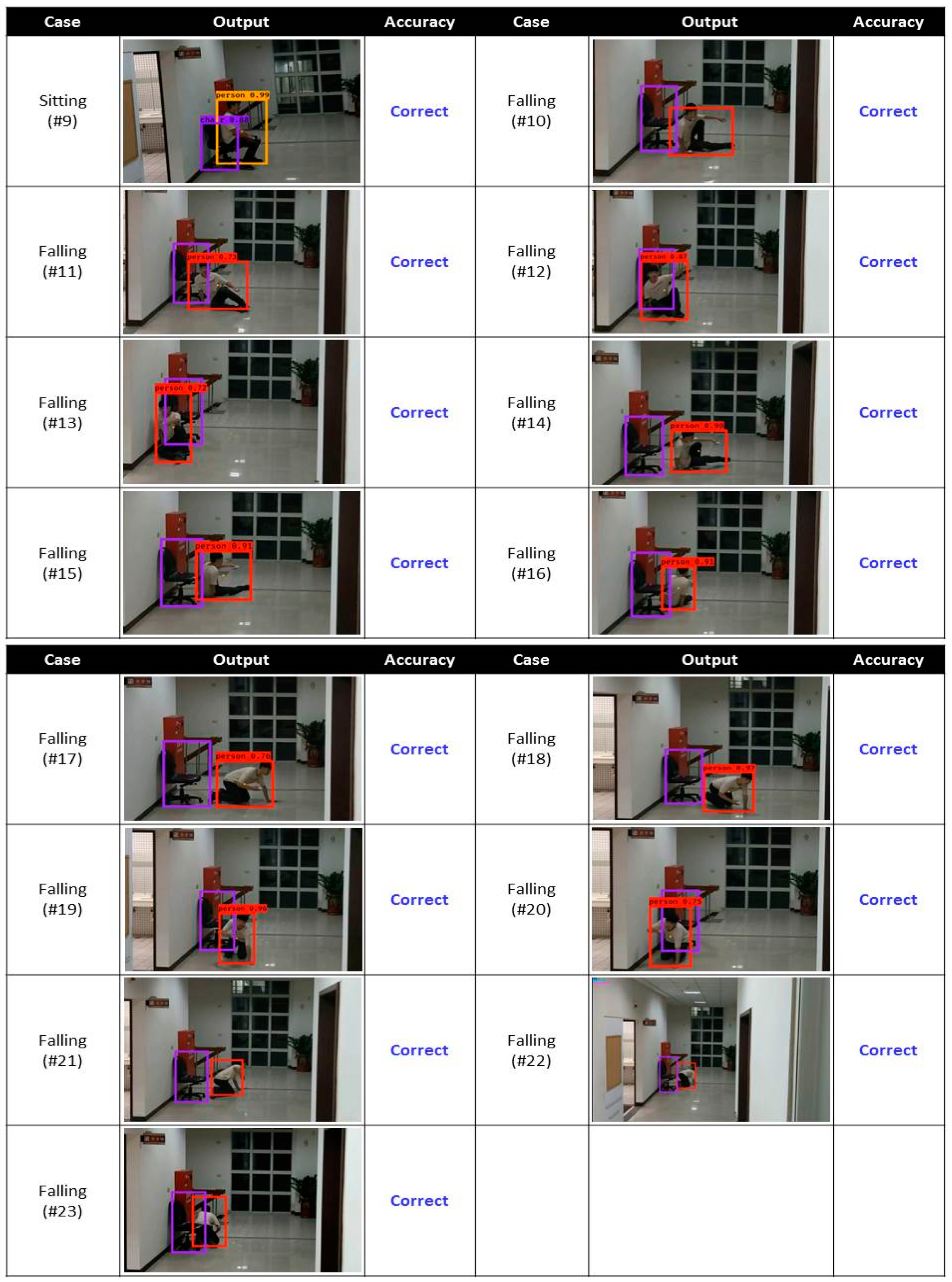
Figure 10, we test when the tester walks across (in front of or behind) the chair and does not sit down from a different perspective. In addition, the tester walks a different distance from the tester to the chair and takes a different route. As the tester’s height does not change significantly within 1.5 s, IFADS does not detect a fall. From Case 5 to Case 9, we test when the tester walks, sits on the chair, stands up from the chair, and leaves with a different rotation angle of sitting. Since the top of the tester remains higher than the top of the chair, IFADS does not detect a fall. From Case 5 to Case 8, IFADS accurately recognizes the posture of the tester as sitting. IFADS recognizes the posture of the tester as in progress in Case 9, because the tester does not sit at the center of the chair’s faceplate. However, if an elderly person sits at the end of a chair, he/she may slide out from the chair easily. Then, we test when the tester falls off the chair while sitting with a different rotation angle of the fall from Case 10 to Case 16, and test when the tester falls off the chair while standing up from the chair in other cases. IFADS detects the fall accurately in these cases. In Cases 10, 21, 22, and 23, IFADS cannot detect the tester, because the falling tester’s human features disappear from the frame, but IFADS can still detect the fall because of the state tracking.
Among these cases, the color of the tester’s clothes may cause a fault in IFADS detection, because if the color of the clothes is similar to the color of the chair, the height of the tester that IFADS detects may be wrong. On the other hand, the height ratio of the tester to the chair may cause a fault in IFADS detection, because if the person falls, the top of the tester may be higher than the chair. For that, we test the effect of the colors and the effect of the person–chair ratio on the accuracy.
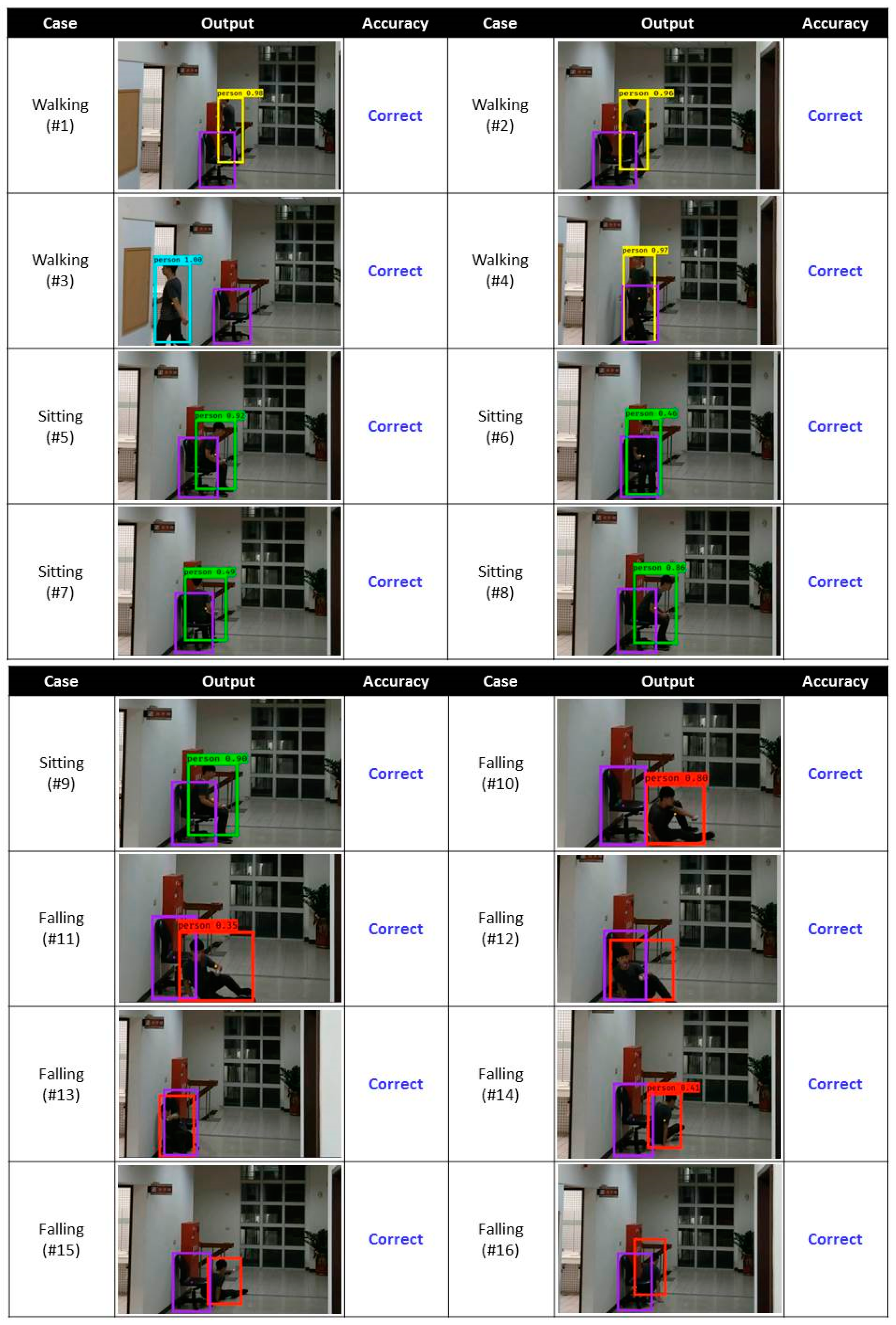
Figure 11 shows the test results of the effect of the colors on the accuracy. In all test cases, IFADS detects correctly. However, in Cases 12, 13, 15, 16, 19, and 23 in
Figure 11, the tester cannot be detected. In Cases 12, 15, and 19, the tester cannot be detected due to having a falling posture. In Case 13, the color of the tester’s clothes is similar to the color of the chair, so IFADS cannot detect the tester. In Cases 16 and 23, IFADS cannot detect the tester or the tester’s posture, and it is too difficult to find the human features, as the tester is obscured by the chair. In Case 20, the height of the tester’s bounding box is not detected properly, since the colors of the tester’s clothes and hair are similar to the color of the chair. Even if the height is not detected properly, IFADS can detect the fall, because the top of the tester’s bounding box is lower than the top of the chair, and the height is the same as the fall while the tester is sitting on the floor.
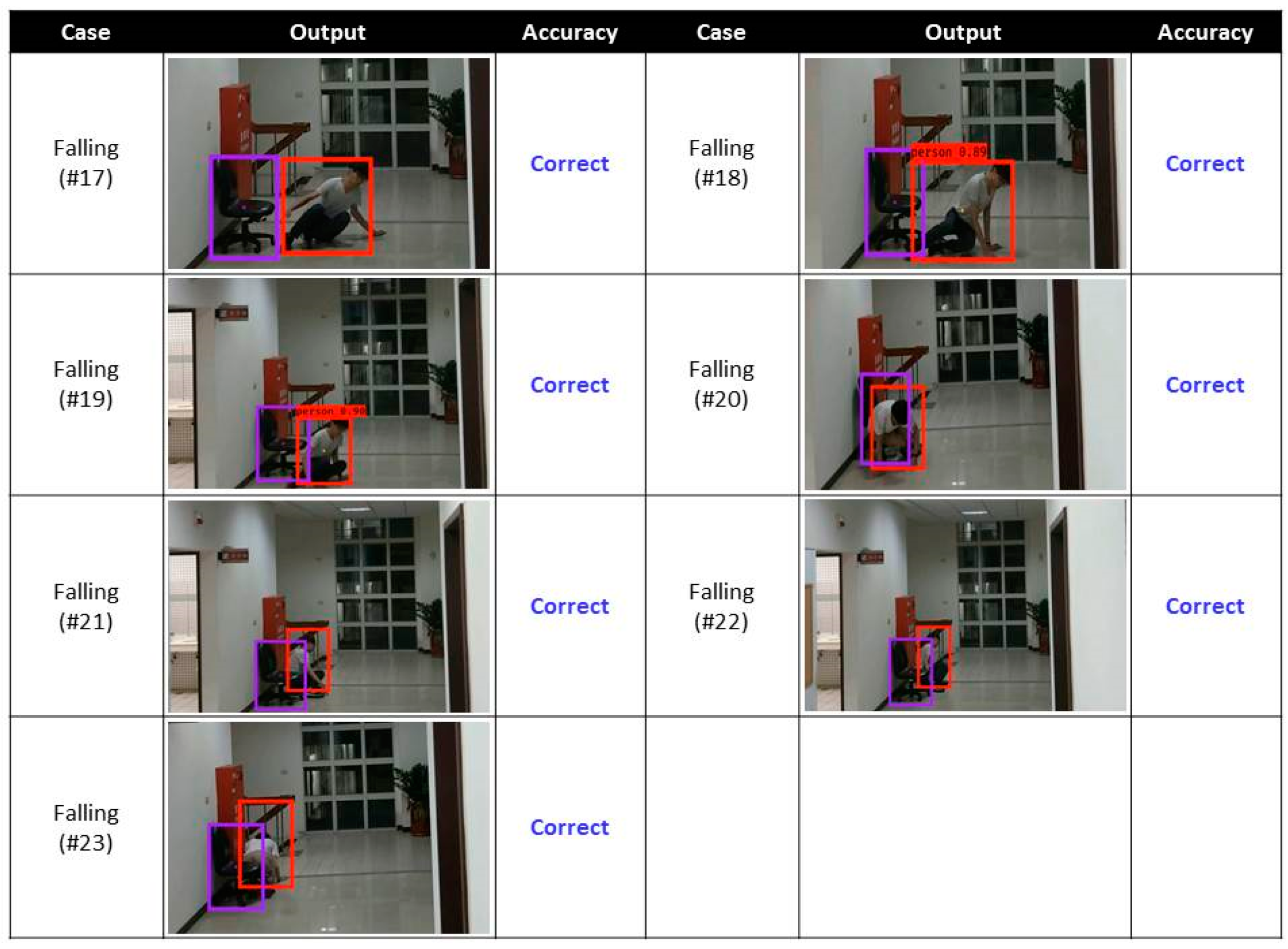
Figure 12 shows the test results of the effect of the person–chair ratio on the accuracy. For all tests, IFADS detects correctly. The tester in
Figure 12 is 0.15 m higher than the tester in
Figure 10, and the chair in
Figure 12 is 0.1 m lower than the chair in
Figure 10. As mentioned above, the height ratio of the tester to the chair for
Figure 10 is 1.74, and the height ratio of the tester to the chair for
Figure 12 is 2.12. In all test cases, since IFADS detects the change in the person’s state, it can detect correctly even if the tester cannot be detected, because the human features of the falling tester cannot be found in Cases 14, 15, 16, 17, 20, 21, 22, and 23. In Cases 14, 15, 16, 21, 22, and 23, IFADS cannot detect the testers, because some of the testers’ features are obscured by the chair. Moreover, the falling posture cannot be detected in Case 17. In Cases 20 and 23, IFADS cannot detect the tester, because the tester’s posture is too difficult to detect and the tester’s human features are obscured by the chair. In all fall cases, IFADS can detect the fall even if the person is higher than twice the height of the chair.
5.3. Test Cases: Other Situations
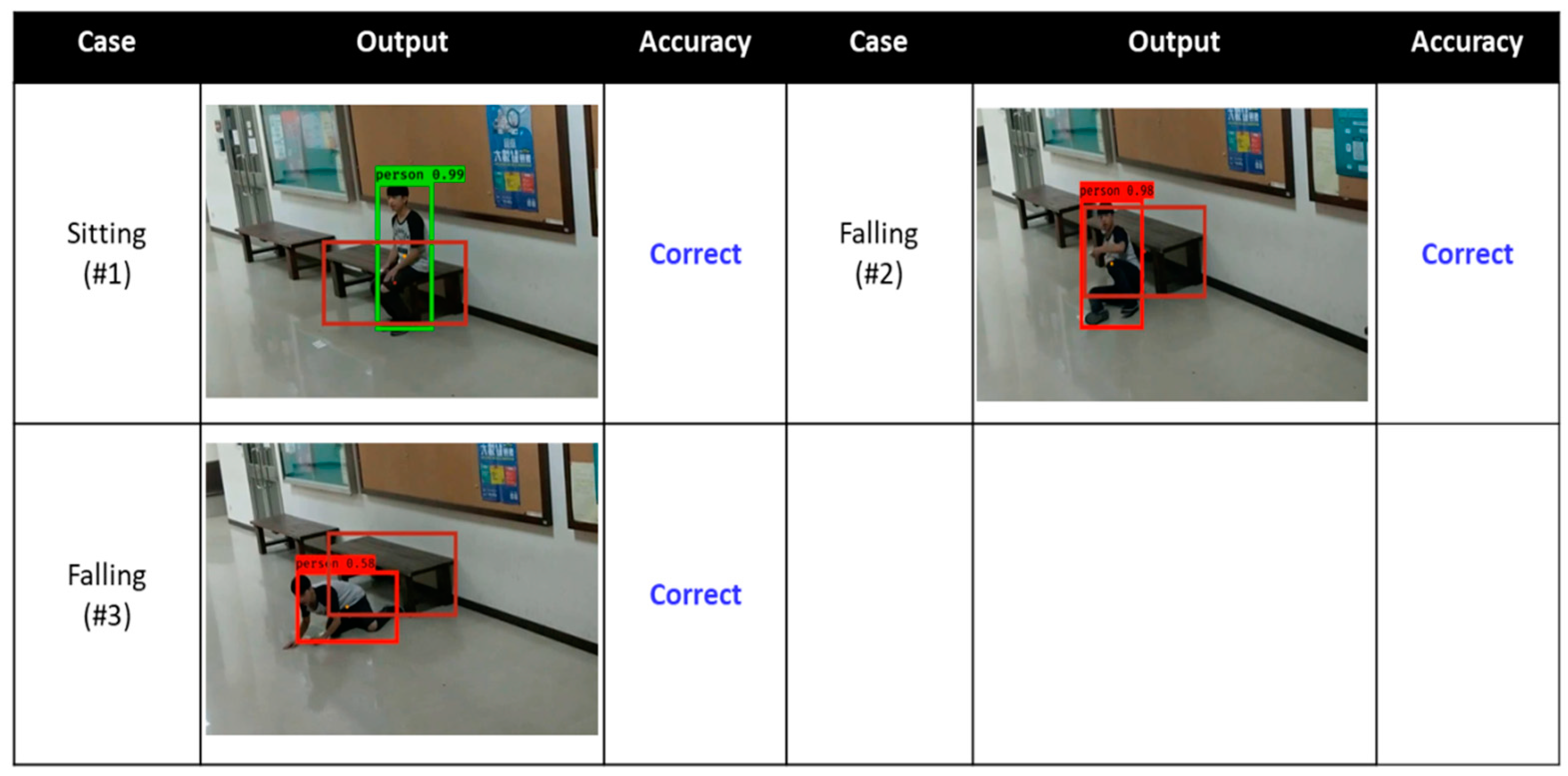
For the other situations, there are three tests: sitting on a bench with no seatback, squatting, and a high-angle shot. Apart from when lying on the floor, the top of the person is still higher than the top of the bench with no seatback. For that, if IFADS detects the object as the bench, then it considers the height of the bench as twice that. Then, we test when the tester is sitting on the bench with no seatback, and falls off the bench with no seatback, while sitting on the bench and standing up from the bench.
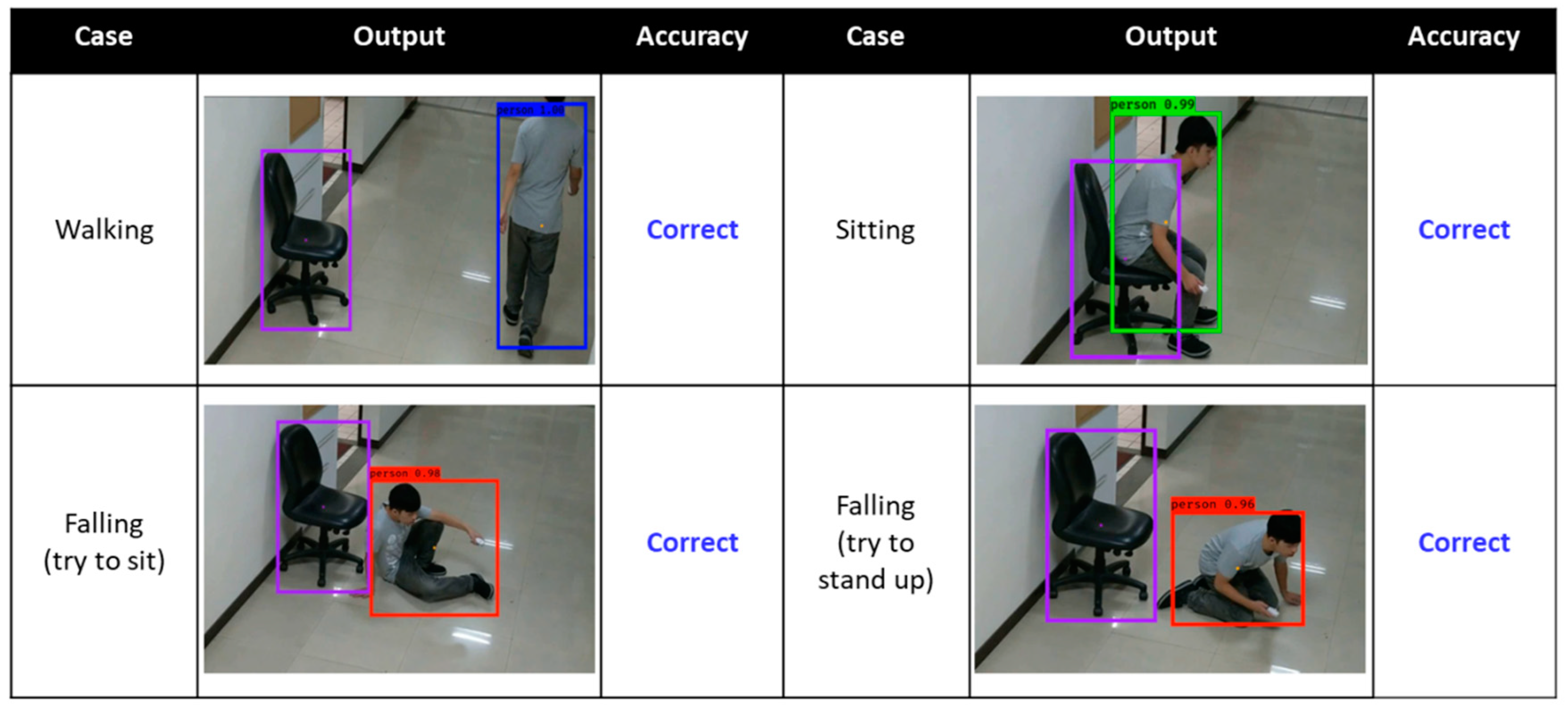
Figure 13 shows the results of the bench with no seatback. In Case 1, the tester walks to the bench, sits down, and walks away. In Case 2, the tester walks to the bench, sits down, and falls while sitting down. In Case 3, the tester walks to the bench, sits, and falls while standing up from the bench. The results in
Figure 13 show that IFADS detects correctly even with a bench with no seatback.
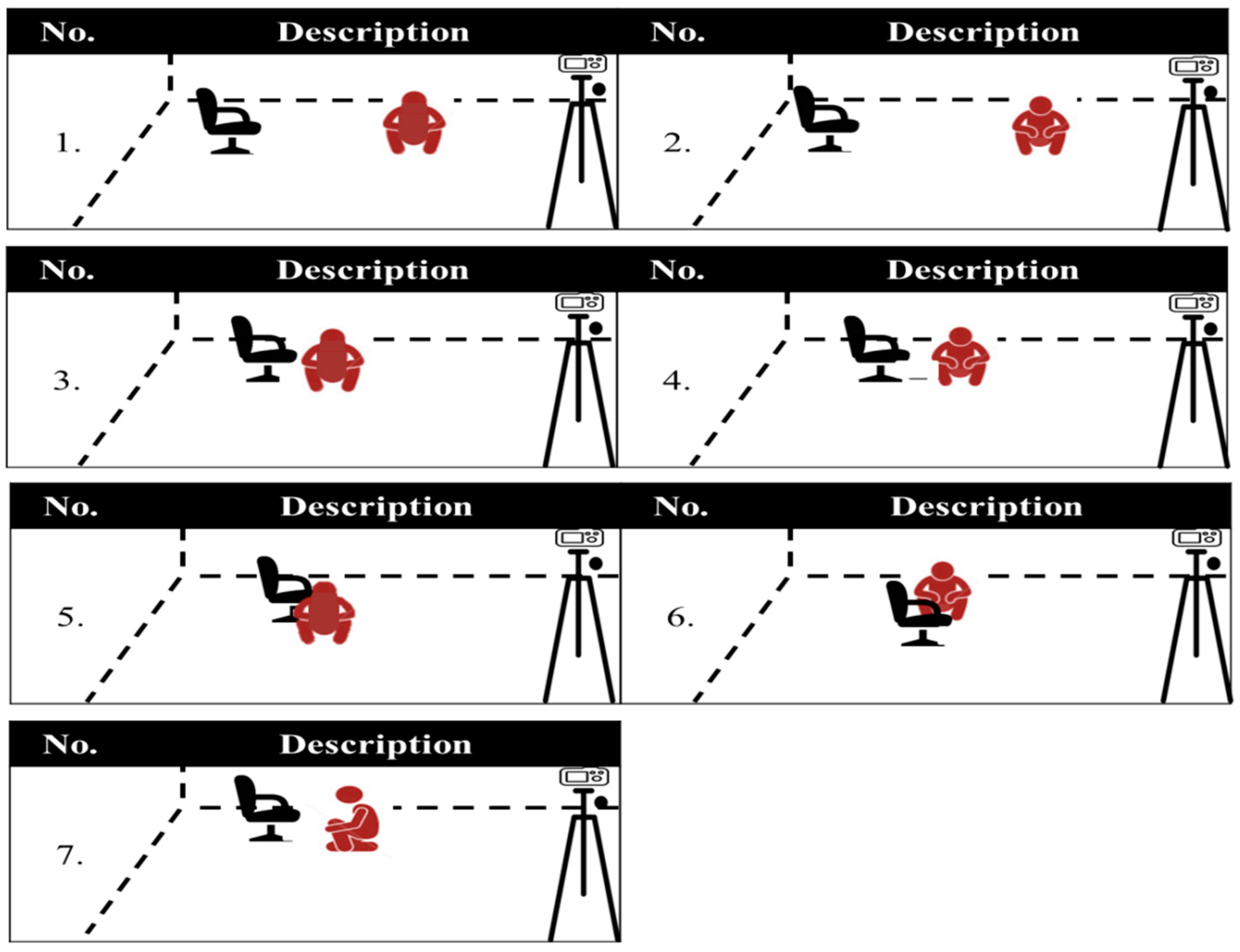
Squatting may cause a fault in IFADS detection.
Figure 14 shows the illustration of the squatting cases. We test when the tester squats when far from the chair and when beside the chair for more than 3 s. Case 1 and Case 2 both show that the tester squats when far from the chair; the tester has his/her back to the camera in Case 1, and faces the camera in Case 2. Case 3 to Case 7 all show that the tester squats. Both Case 3 and Case 4 show that the tester squats when beside the chair; the tester has his/her back to the camera in Case 3, and faces the camera in Case 4. The tester squats in front of the chair, behind the chair, and while facing the chair in Cases 5, 6, and 7, respectively.
Figure 15 shows the results of the squatting test cases. In Case 1 and Case 2, a fall is detected, since the height of the tester is less than 5.5/8 times the tester’s height 1.5 s before and the tester maintains the state for more than 3 s. In the other cases in
Figure 15, the tester squats when beside the chair. The tester is detected as a falling person in Case 3 and Case 7, since he bends his back more. The tester is not detected as a falling person in the other cases, since he keeps his back straight more. As mentioned, squatting may cause a fault in IFADS detection. However, it is dangerous for the elderly to squat for more than 3 s, since the elderly face muscle loss.
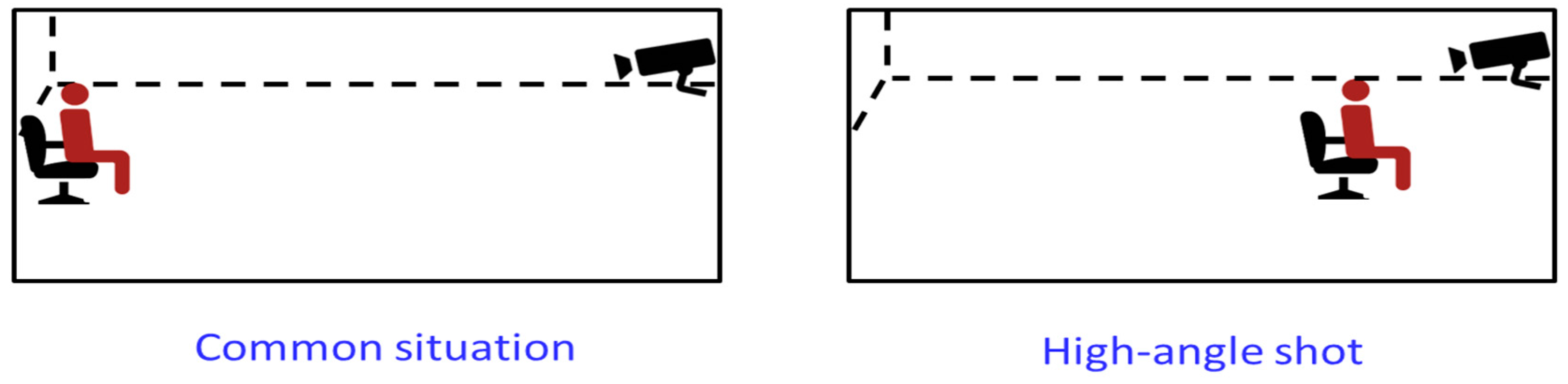
For a high-angle shot, the tester may cause a fault in IFADS detection, since the height of the person that IFADS detects may be wrong.
Figure 16 shows the illustration of the difference between the common situation and a high-angle shot. We test when the tester walks across (in front of or behind) the chair, sits on the chair, and falls.
Figure 17 shows the test results of the high-angle shot. IFADS detects the fall correctly, because it detects the fall by the change of the person’s height and state.
5.4. Case Study
In order to further investigate the effectiveness of IFADS, we conducted 16 case studies of videos from YouTube and Giphy that captured real falls.
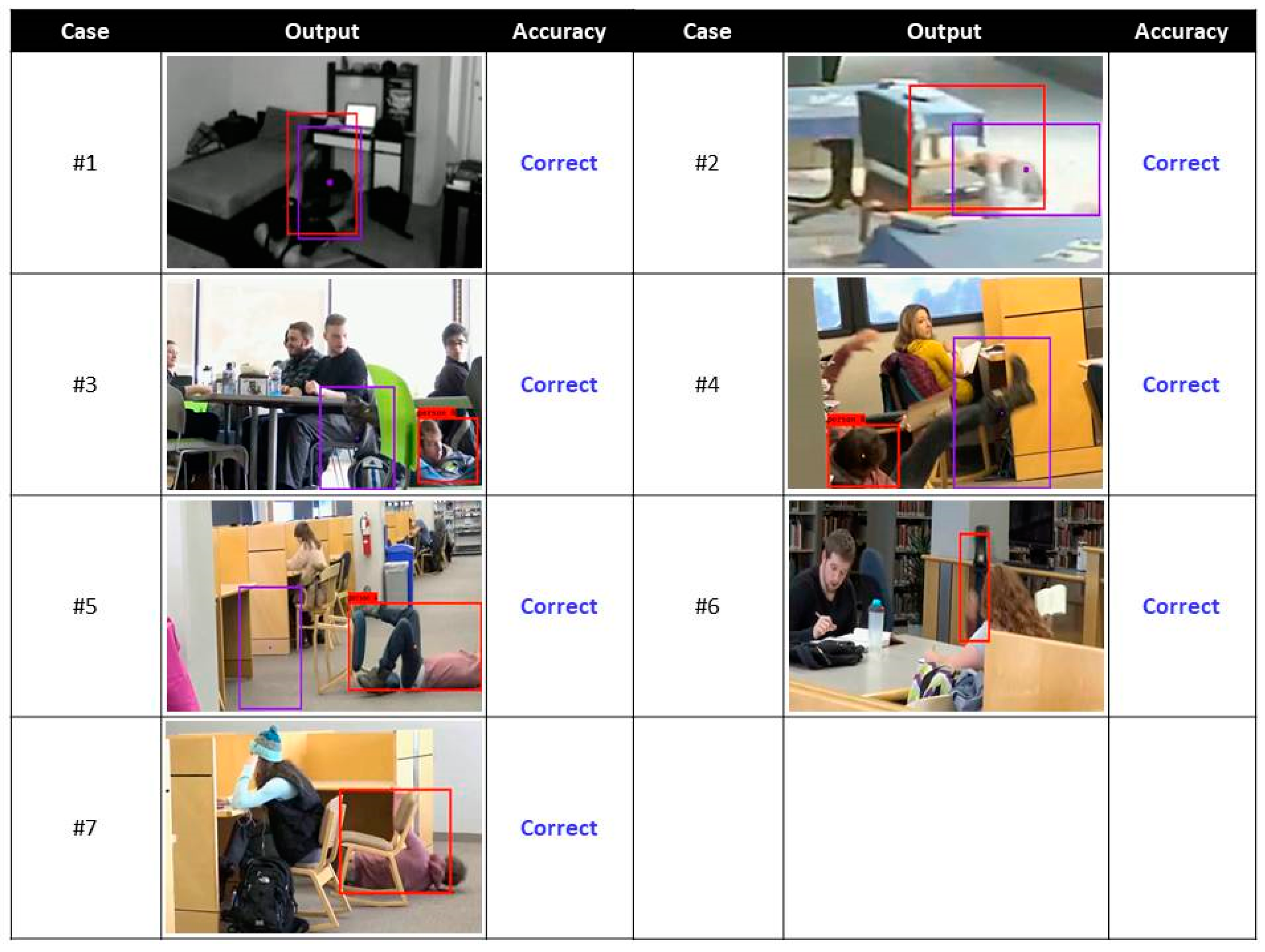
Figure 18 shows the results of the case studies for when a person falls while sitting. From Case 8 to Case 16, the person falls while walking. Case 1 [
38] shows a man who walks to a chair and sits on the chair. However, when he sits and relies on the seatback, the seatback is broken, so he falls and his human features are lost from the frame while he is falling. Case 2 [
39] shows that when an elderly man tries to sit on a wheelchair, the wheelchair is moving, so the elderly man falls. Since the elderly man is obscured by the bed, the elderly man cannot be detected. Case 3 to Case 7 [
40] are multi-person and multi-chair situations. In Case 3, a man tries to sit but falls from a chair, and his body is obscured by other chairs. In Cases 4 and 5, a man falls from a chair. In Case 6, a man falls from a chair and is obscured by a table and another person. In Case 7, a man falls from a chair in a library.
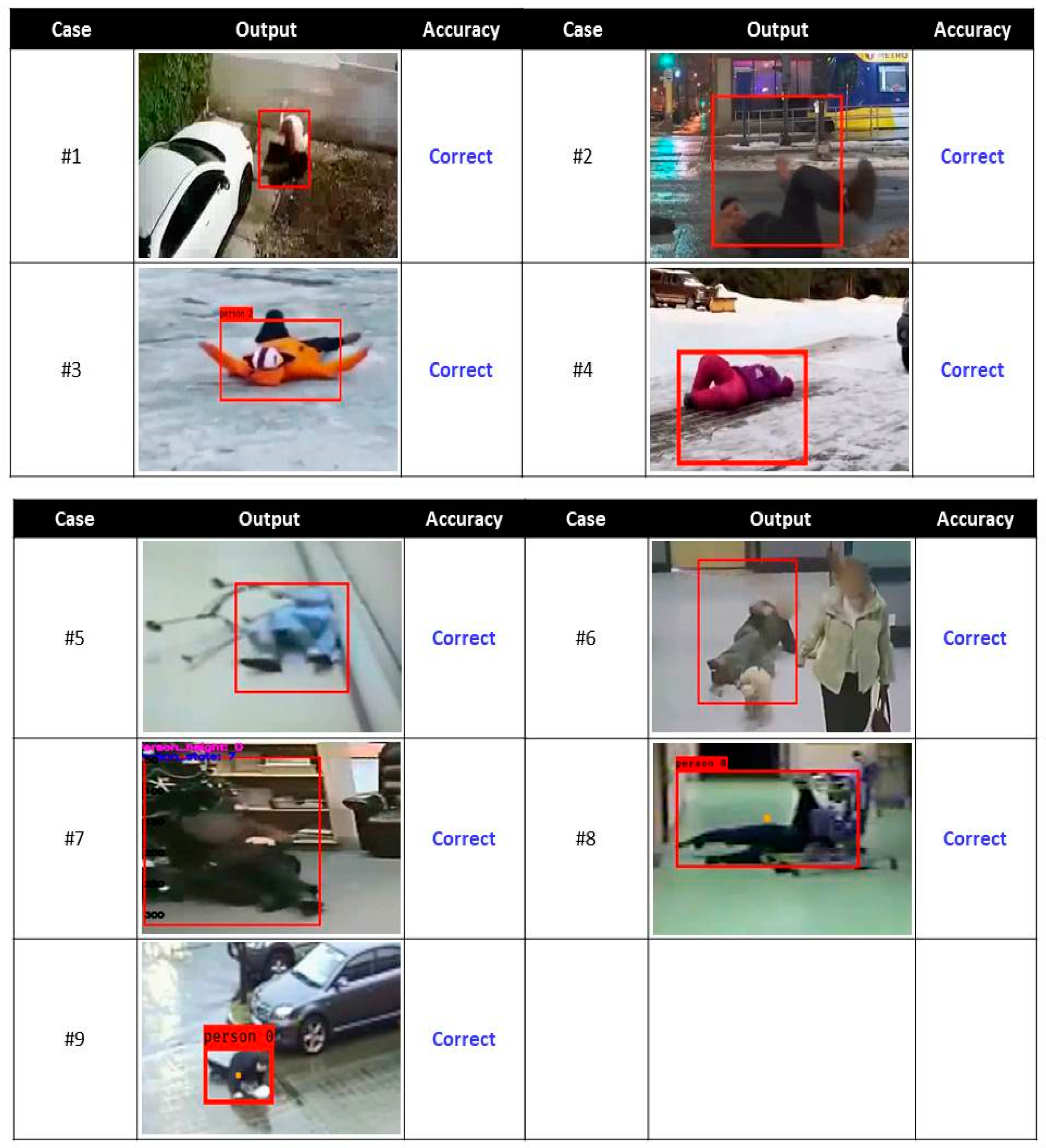
Figure 19 shows the results of the case studies for when a person falls while walking. In Case 1 [
41], a woman falls over on the street. In Case 2 [
42], a man slips on the road when the road is wet. In Case 3 and Case 4 [
42], an adult and a child slip on the ice. In Case 5 [
43], an elderly man tries to use the walking aid and falls down. In Case 6 [
44], an old man falls when his pet dog runs around him and trips him with a leash. In Case 7 [
45], an elderly man falls because he feels dizzy. In Case 8 [
46], shows an old woman runs along a corridor and hits an object, which makes her fall. In Case 9 [
47], a man falls over while the floor is wet. In summary, IFADS detects the falls from all of these case study videos. In these cases, IFADS is proven to be a practical solution to help caregivers quickly identify falling people in public areas.
5.5. Performance Comparison
We compare IFADS with the method that Diraco et al. [
6] has proposed, which is the most intuitive method. The method detects falls by the distance of the human centroid from the floor plane, and the authors consider that 0.4 m provides the best choice reduce false alarms. Thus, we recognize falls when the distance of the tester’s centroid from the floor plane is less than 0.4 m manually. We test the method without using the video case studies, since we cannot know the real height of the people in the videos.
Table 3 shows the results of that method. A true positive (TP) outcome occurs when the method correctly detects a fall case. A false positive (FP) outcome occurs when the method creates a false alarm. A false negative (FN) outcome occurs when the method misses a fall case. A true negative (TN) outcome occurs when the method correctly detects a non-fall case. When the tester falls while sitting down or trying to stand up, as in Case 10 to Case 16 in the common situation, and when the tester keeps his back straight or does not look down, it is difficult for the method to detect a fall. If the tester is taller than 180 cm, it is more difficult to detect a fall. On the other hand, if the person falls while standing up from a chair, as in Case 17 to Case 23 in the common situation, the method is likely to detect the fall.
In addition, as the existing image-based method detects falls by recognizing the posture of the person in the current frame, we compare IFADS with the machine learning method. We consider that the method cannot detect a fall when the method cannot detect the person. As
Figure 20 shows, the person may be unable to be detected or may be detected as another object. Thus, we adopted the TensorFlow object detection application programming interface (API) [
48], which contains various models and neural networks (e.g., single shot detector (SSD) [
49], MobileNet [
50], region-based convolutional neural network (faster_RCNN) [
51], inception [
52], region-based fully convolutional networks (RFCN) [
53], resnet101 (deep residual network) [
54], and neural architecture search (NAS) [
55]) to detect objects. IFADS adopts YOLO to detect falls.
Table 4 shows the results of a falling person detected by the machine learning methods. In the fall cases, YOLO and ssd_mobilenet_v1_coco are faster than the other models, but the accuracy is only up to 59.7%. The accuracy of faster_RCNN_inception_v2_coco, RFCN_resnet101_coco, and faster_RCNN_NAS is up to 80.6%; however, they spend at least 10.03 s per frame, so they should not be adopted in real time. In summary, as
Table 3 shows, the recall of the method that was proposed by Diraco et al. [
6] was only 58.70%. Their method did not perform well in detecting falls while sitting down due to the poor prediction. Also, their method cannot identify the relationship between the person and environmental objects and may lead to an inaccurate result. Further, multiple cameras are required to determine the status of a walking person. As
Table 4 shows, although YOLO and ssd_mobilenet_v1_coco can complete the computation quickly (0.13 s and 6.22 s, respectively), the accuracy was very low. Other methods, such as faster_RCNN_inception_v2_coco, RFCN_resnet101_coco, and faster_RCNN_NAS, can achieve a higher accuracy but require a longer computation time. Compared with the above-mentioned methods, IFADS performed better in detecting falls that occur while forward walking, sitting down, and standing up. IFADS can be used by not only nursing homes but also hospitals to improve the quality of health care facilities.
In conclusion, we analyzed the accuracy of IFADS with a total of 99 videos (83 test videos and 16 real videos).
Table 5 shows that, although IFADS creates four false alarms, it does not miss any fall cases. The four false alarms occurred because the tester squatted for more than 3 s; however, it is dangerous for the elderly to squat for more than 3 s. The precision was found to be 93.94%, and the recall was found to be 100%. In conclusion, the accuracy of IFADS is 95.96%. We have proven IFADS to be a practical solution to help caregivers, security staff, and responders quickly detect falls.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}