Sparse Haar-Like Feature and Image Similarity-Based Detection Algorithm for Circular Hole of Engine Cylinder Head


Abstract
:1. Introduction
2. Methods
| Algorithm 1: Flow of feature-matching algorithm based on sparse Haar-like feature and similarity calculation. |
| Input: Model image Im, test image It, key point loc in the model image, image pyramid layer number Np and scaling factor Zp, convolution kernel layer number Nc and scaling factor Zc, similarity adjustment factor k, adjustment factor α. Output: The similarity point Ps in the test image It which is most similar to the key points loc in the model image Im. |
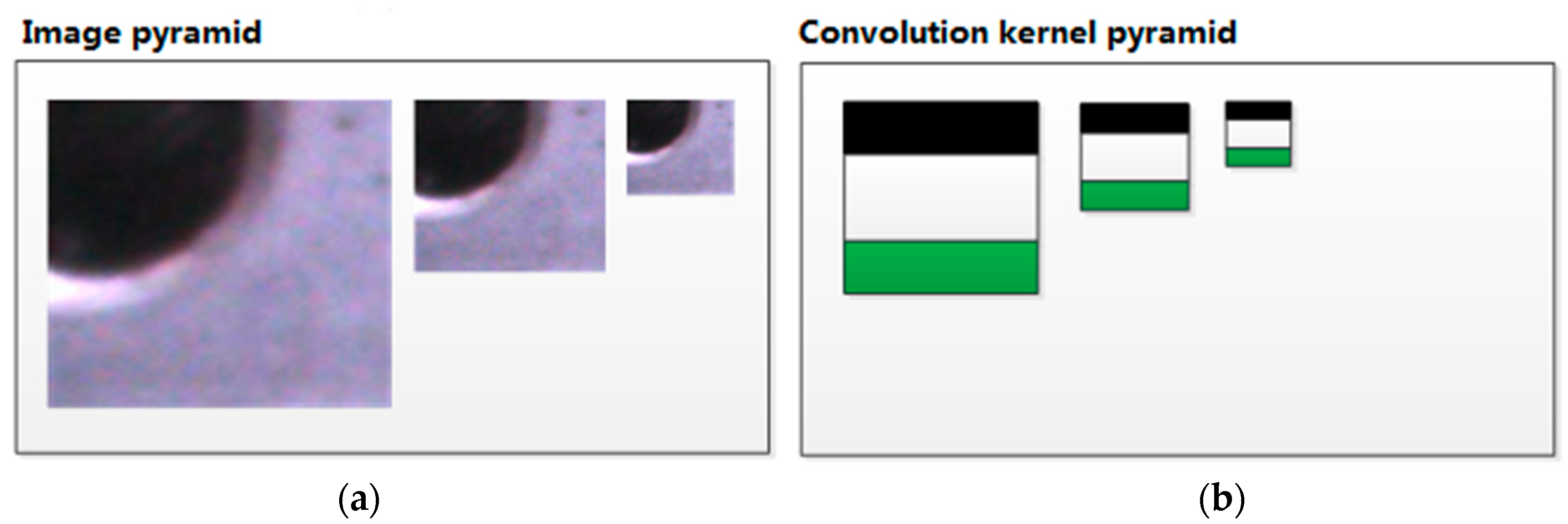
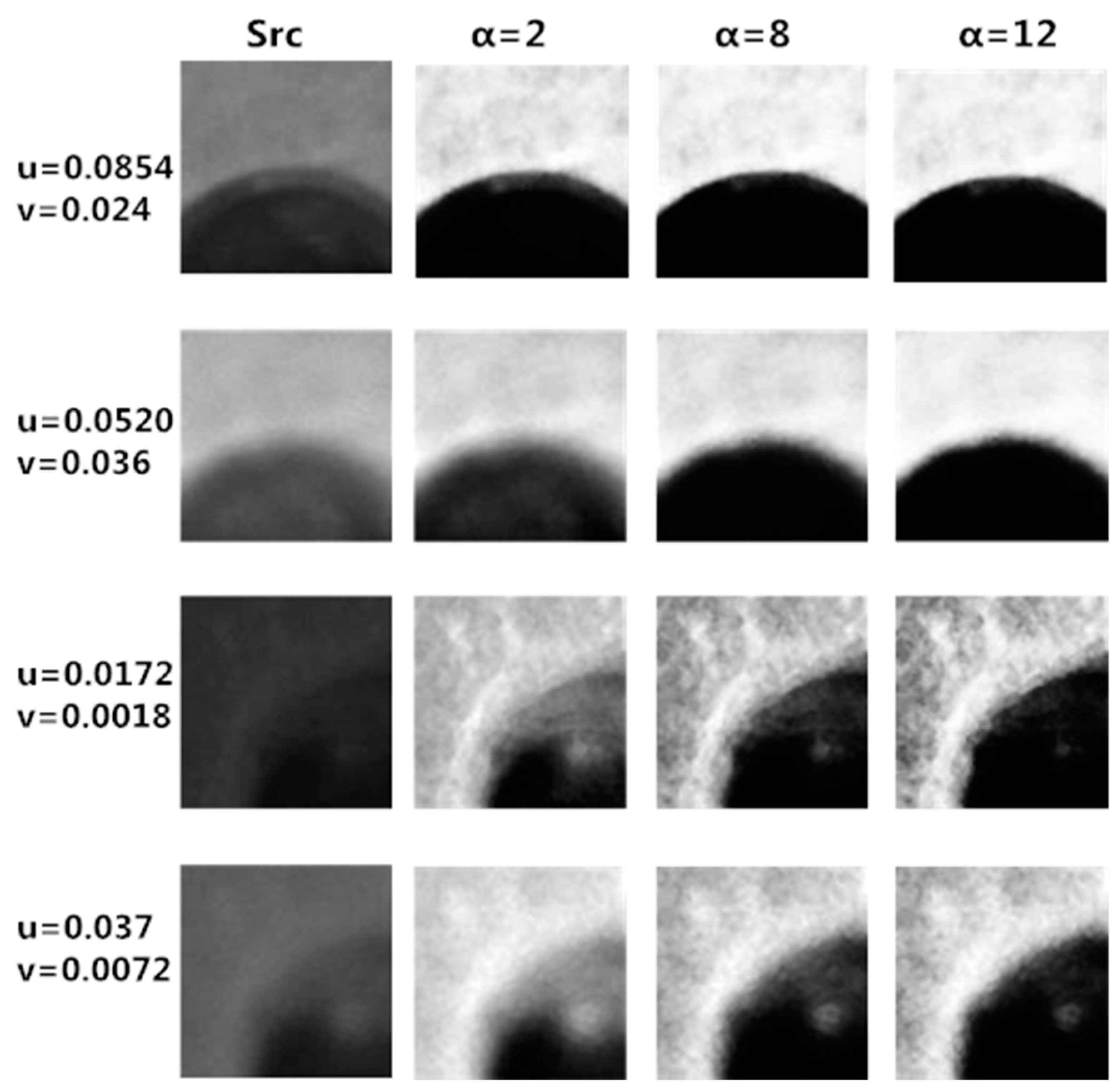
| 1. The brightness-enhanced images It’ and Im’ of It and Im are respectively obtained according to Equation (11). 2. Construct the image pyramid on It’ and Im’ according to Np and Zp; construct the sparse Haar-like feature detection operator pyramid according to Nc and Zc. 3. Extract the features of each pixel of each layer of the pyramid according to Equation (1), and then merge them by inverse pyramid scaling to obtain the sparse Haar feature F of each pixel of It and Im. 4. Normalizing the features according to Equation (2). is gotten. 5. The heat map of the key point loc in Im and It is obtained according to Equation (7). The maximum point of the heat map is the similarity point Ps in It that is most similar to loc in Im. |
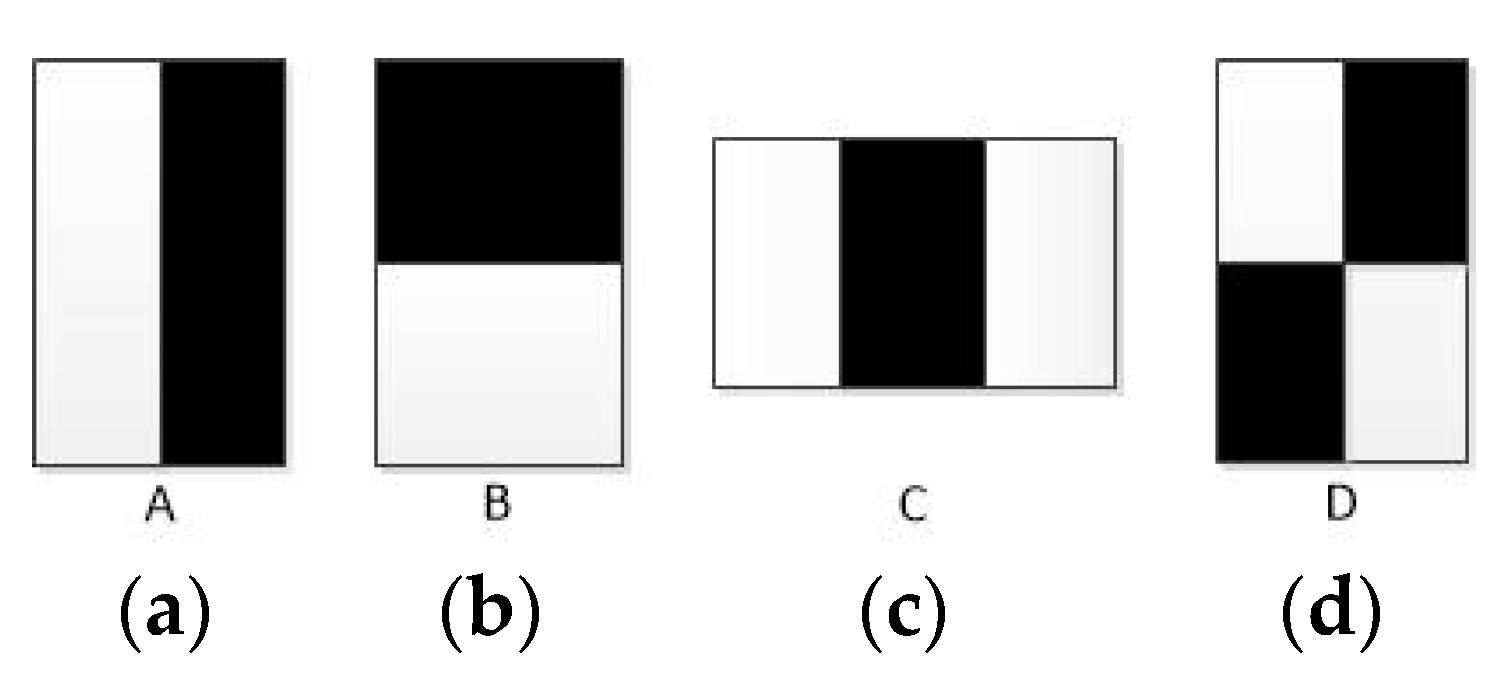
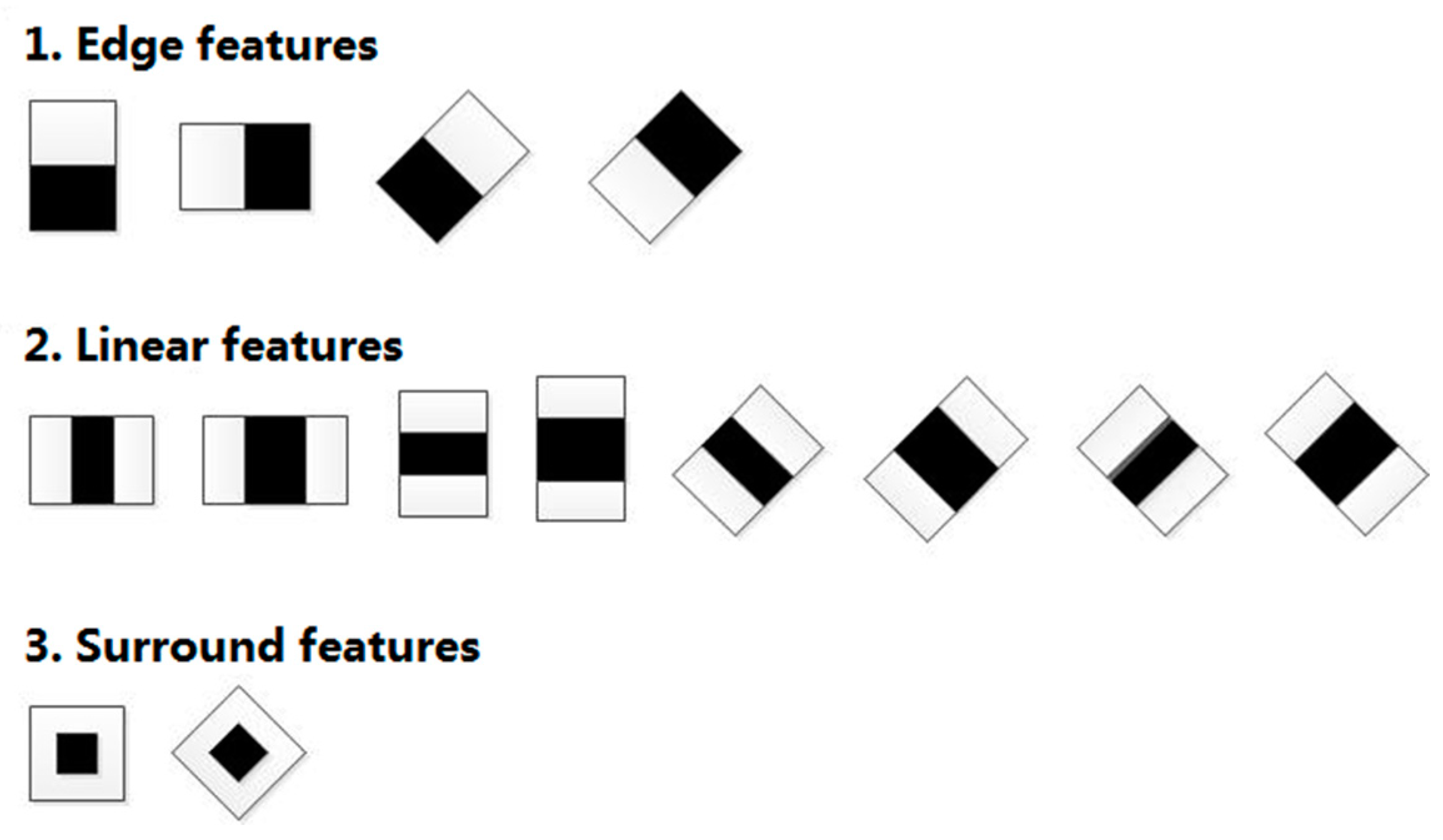
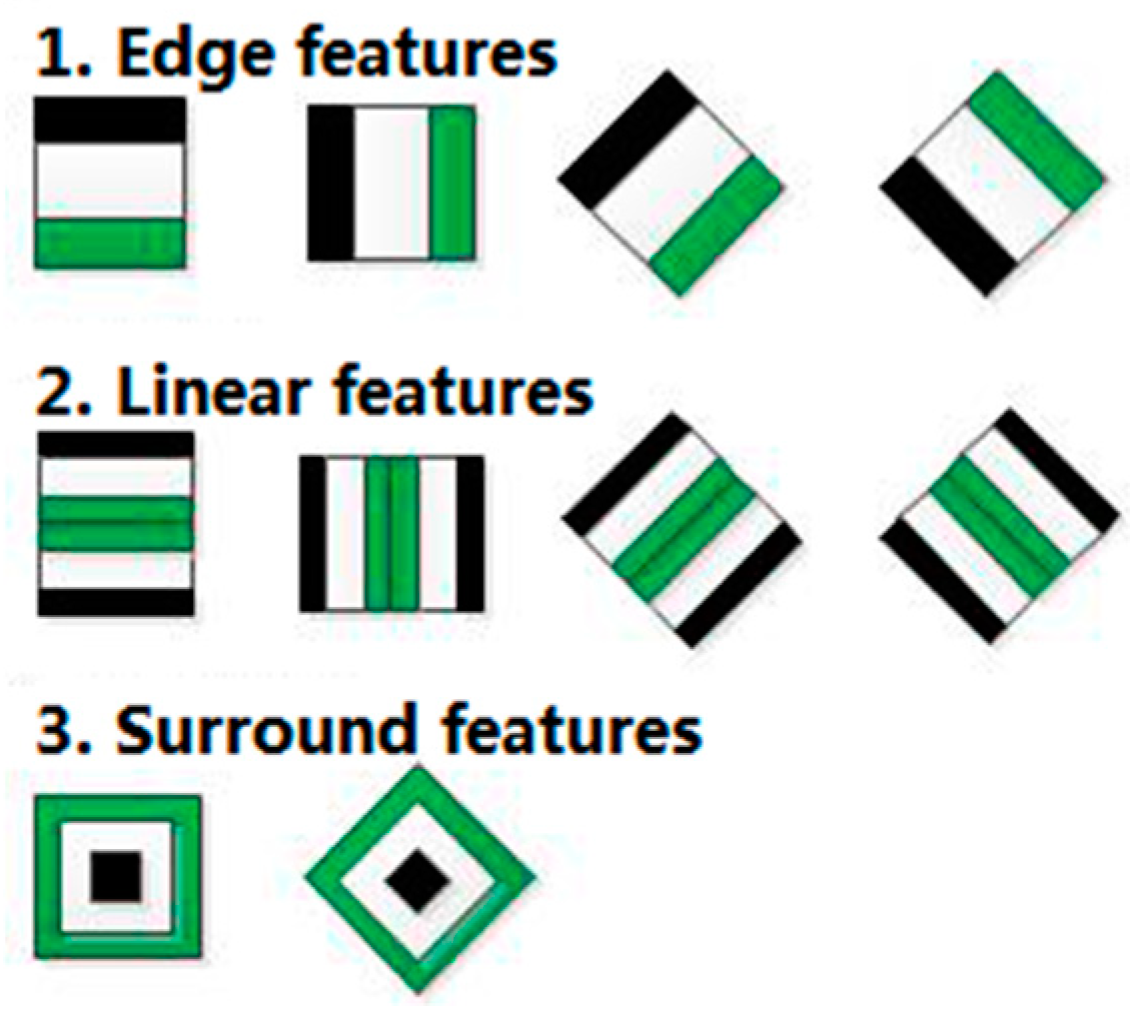
2.1. Improved Sparse Haar-Like Features
2.2. Calculation of Feature Similarity
2.3. Robustness Enhancement Method of Illumination
3. Experimental Results and Analysis
3.1. Analysis of Improved Haar-Like Feature
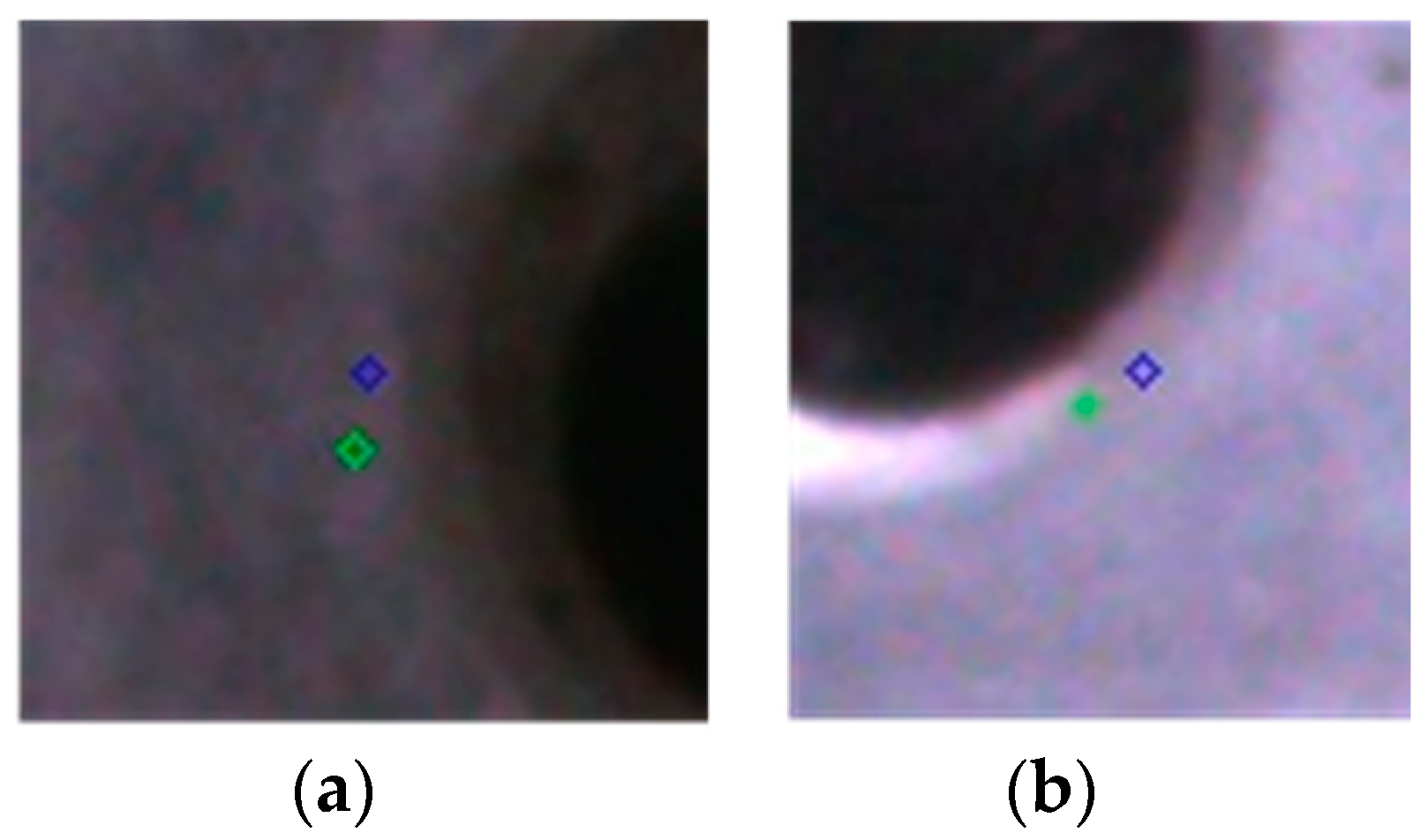
3.2. Analysis of Detection Robustness
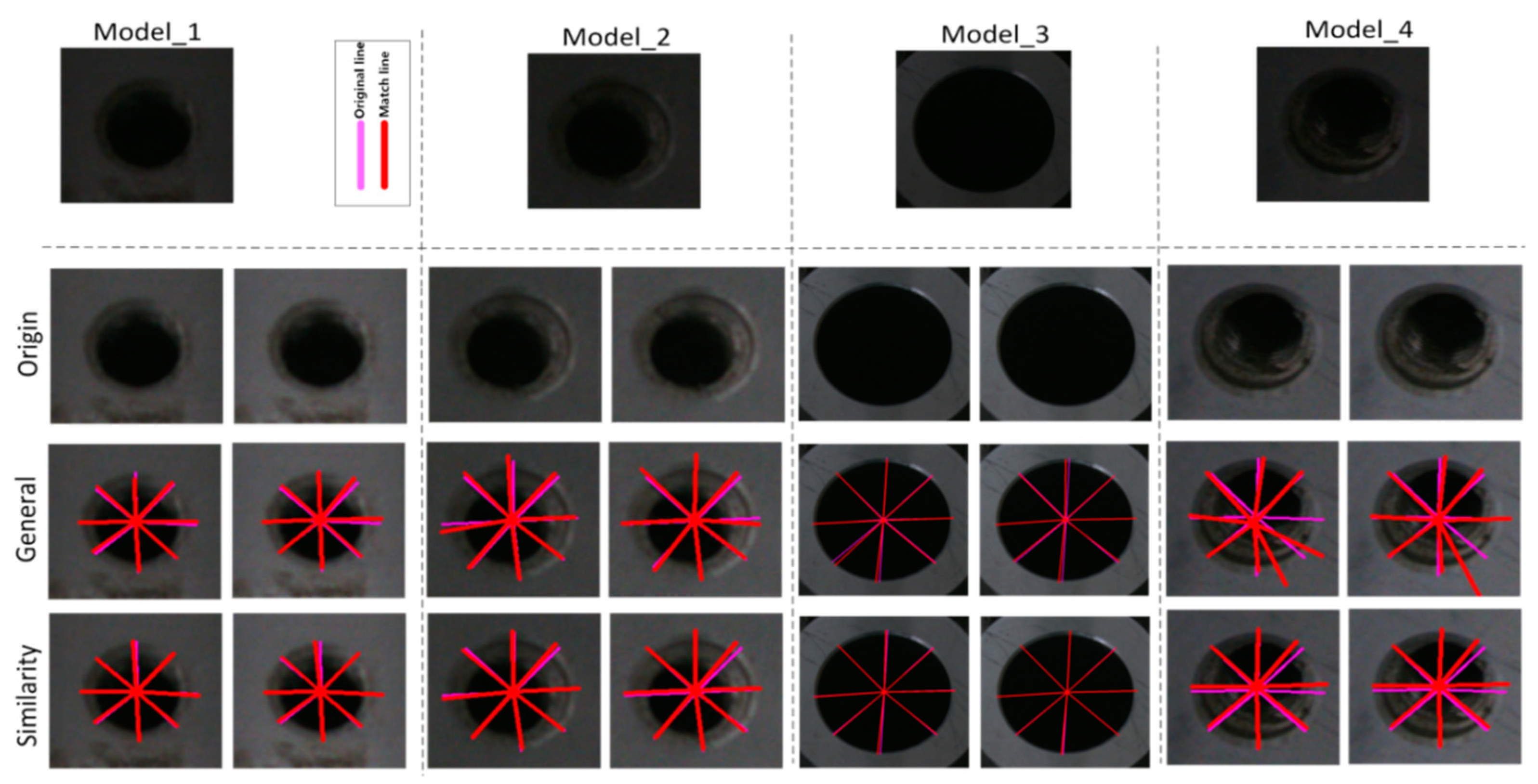
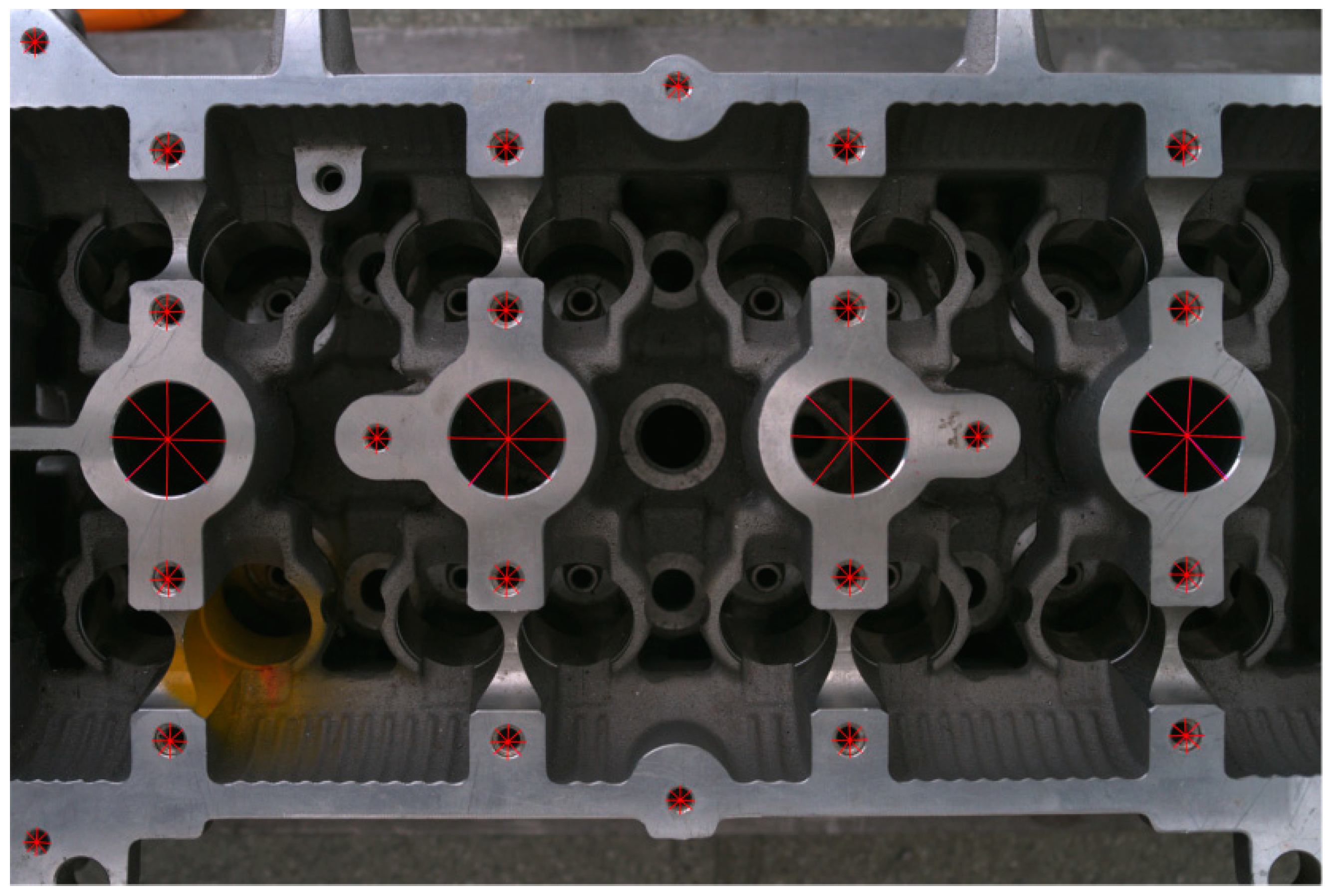
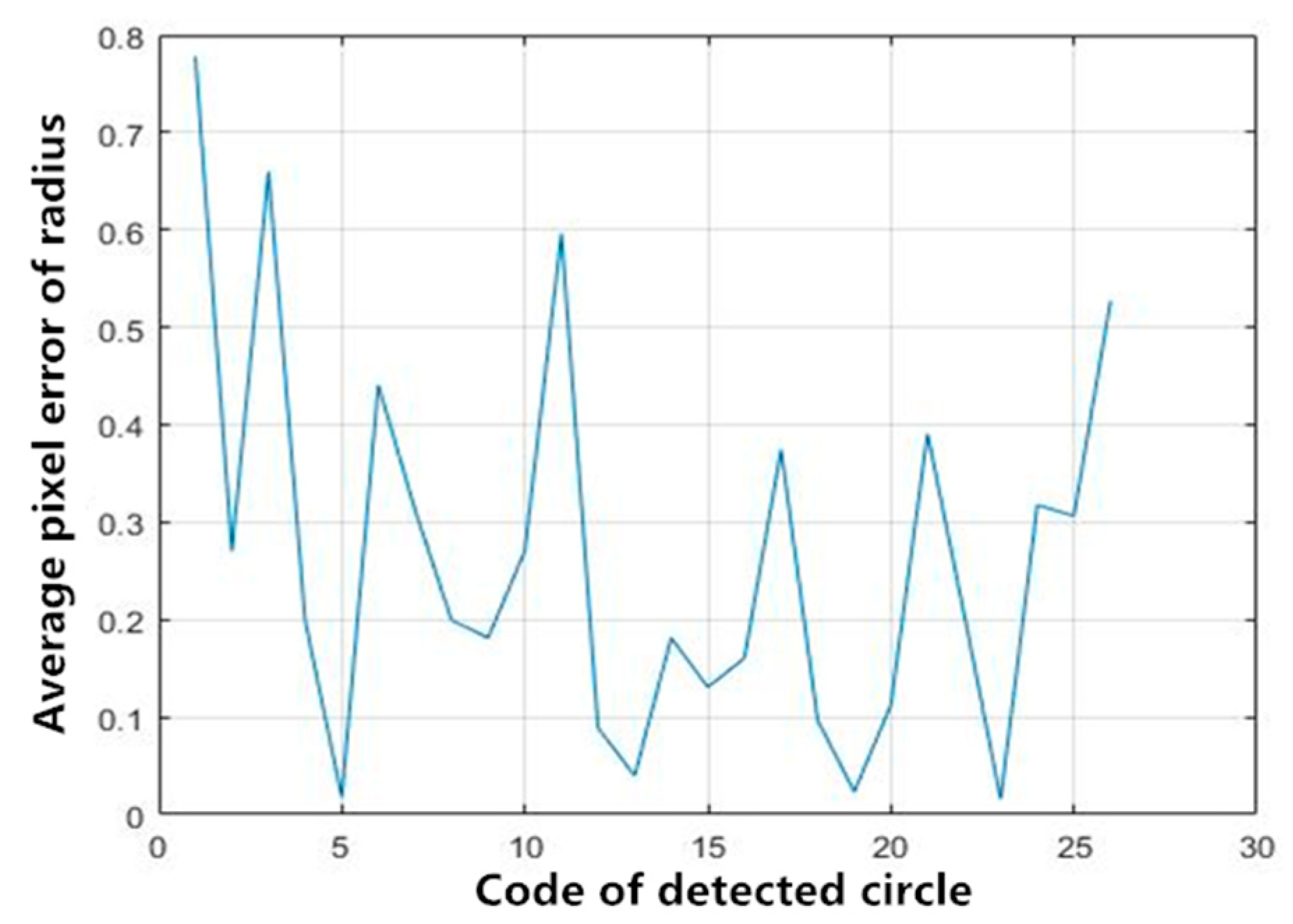
3.3. Comprehensive Experimental Results and Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Li, Z.; Jiang, Y.; Hu, C.; Peng, Z. Recent progress on decoupling diagnosis of hybrid failures in gear transmission systems using vibration sensor signal: A review. Measurement 2016, 90, 4–19. [Google Scholar] [CrossRef]
- Glowacz, A. Acoustic based fault diagnosis of three-phase induction motor. Appl. Acoust. 2018, 137, 82–89. [Google Scholar] [CrossRef]
- Laib dit Leksir, Y.; Mansour, M.; Moussaoui, A. Localization of thermal anomalies in electrical equipment using Infrared Thermography and support vector machine. Infrared Phys. Technol. 2018, 89, 120–128. [Google Scholar] [CrossRef]
- Tankasala, S.P.; Doynov, P.; Derakhshani, R.R.; Ross, A.; Crihalmeanu, S. Biometric recognition of conjunctival vasculature using GLCM features. In Proceedings of the 2011 International Conference on Image Information Processing, Shimla, India, 3–5 November 2011; pp. 1–6. [Google Scholar]
- Liu, Y.J.; Chen, Z.; Tang, K. Construction of Iso-Contours, Bisectors and Voronoi Diagrams on Triangulated Surfaces. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 33, 1502–1517. [Google Scholar] [PubMed]
- Zhang, Y.; Brady, M.; Smith, S. Segmentation of brain MR images through a hidden Markov random field model and the expectation-maximization algorithm. IEEE Trans. Med. Imaging 2001, 20, 45–57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, J.J.; Siu, W.C. Using large color LBP in generalized hough transform. In Proceedings of the 2014 IEEE International Conference on Image Processing (ICIP), Paris, France, 27–30 October 2014; pp. 1584–1588. [Google Scholar]
- Bao, P.; Zhang, L.; Wu, X. Canny Edge Detection Enhancement by Scale Multiplication. IEEE Trans. Pattern Anal. Mach. Intell. 2005, 27, 1485–1490. [Google Scholar] [CrossRef] [PubMed]
- Lindeberg, T. Feature Detection with Automatic Scale Selection. Int. J. Comput. Vis. 1998, 30, 79–116. [Google Scholar] [CrossRef] [Green Version]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Kauai, HI, USA, 8–14 December 2001; p. 511. [Google Scholar]
- Rosten, E.; Porter, R.; Drummond, T. Faster and Better: A Machine Learning Approach to Corner Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 32, 105–119. [Google Scholar] [CrossRef] [PubMed]
- Ojala, T.; Pietikäinen, M.; Mäenpää, T. Multiresolution Gray-Scale and Rotation Invariant Texture Classification with Local Binary Patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive Image Features from Scale-Invariant Keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef] [Green Version]
- Bay, H.; Tuytelaars, T.; Gool, L.V. SURF: Speeded up robust features. In Proceedings of the 9th European Conference on Computer Vision, Graz, Austria, 7–13 May 2006; pp. 404–417. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An efficient alternative to SIFT or SURF. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 2564–2571. [Google Scholar]
- Lienhart, R.; Maydt, J. An extended set of Haar-like features for rapid object detection. In Proceedings of the International Conference on Image Processing, Rochester, NY, USA, 22–25 September 2002; pp. I-900–I-903. [Google Scholar]
- Zhang, S.; Bauckhage, C.; Cremers, A.B. Informed Haar-Like Features Improve Pedestrian Detection. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 947–954. [Google Scholar]
- Král, P.; Lenc, L. LBP features for breast cancer detection. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 2643–2647. [Google Scholar]
- Alcantarilla, P.F.; Bartoli, A.; Davison, A.J. KAZE features. In Computer Vision-ECCV 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 214–227. [Google Scholar]
- Heikkilä, M.; Pietikäinen, M.; Schmid, C. Description of interest regions with local binary patterns. Pattern Recognit. 2009, 42, 425–436. [Google Scholar] [CrossRef] [Green Version]
- Bailer, C.; Varanasi, K.; Stricker, D. CNN-Based Patch Matching for Optical Flow with Thresholded Hinge Embedding Loss. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2710–2719. [Google Scholar]
- Liu, S.; Liang, X.; Liu, L.; Shen, X.; Yang, J.; Xu, C.; Lin, L.; Cao, X.; Yan, S. Matching-CNN meets KNN: Quasi-parametric human parsing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1419–1427. [Google Scholar]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Trans. Image Process. 2007, 16, 2080–2095. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
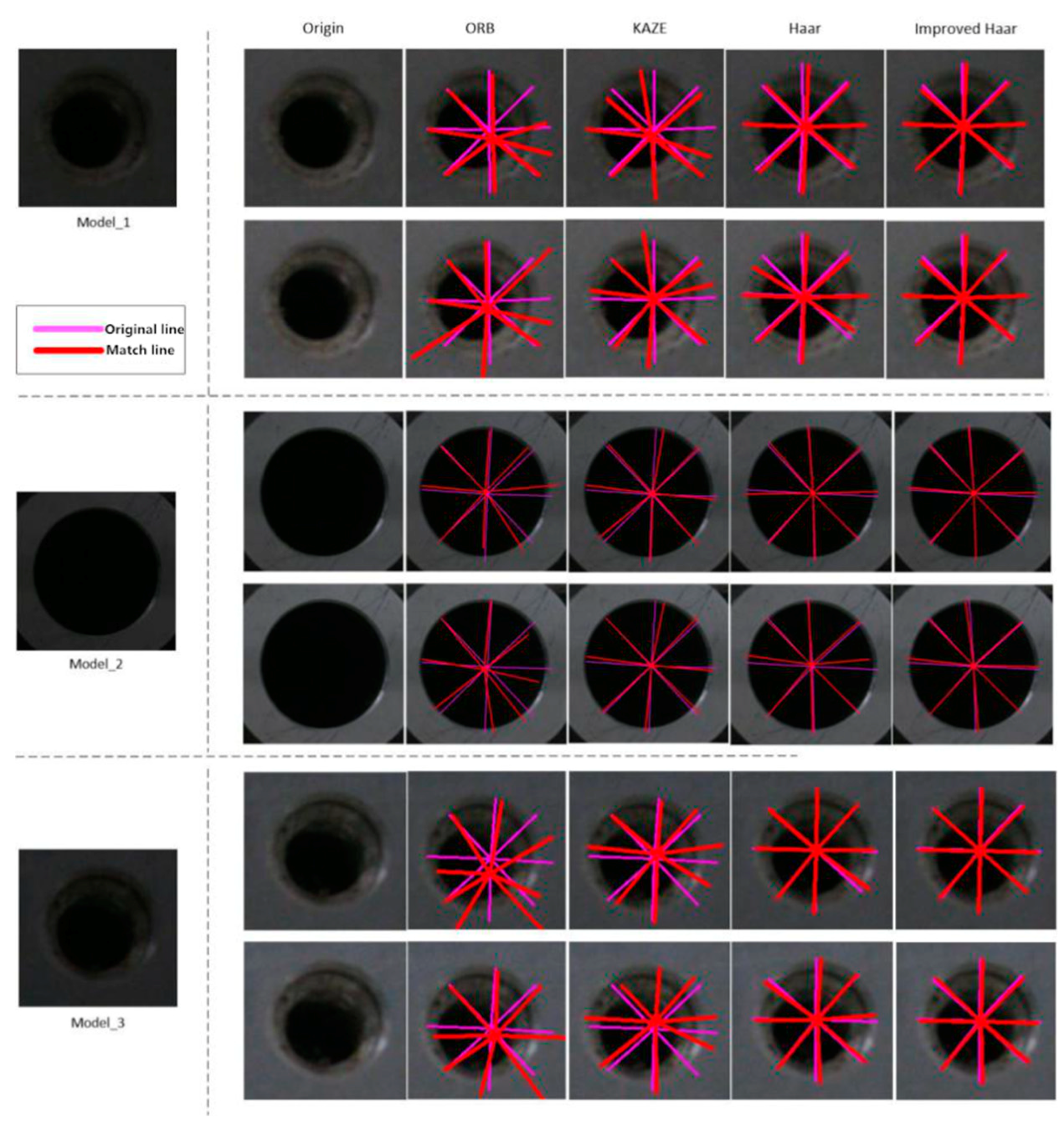
| Model | KAZE | Haar | Improved Haar | |||
|---|---|---|---|---|---|---|
| Model_1 | 12.52 | 10.01 | 3.12 | 4.50 | 2.75 | 3.75 |
| Model_2 | 14.78 | 16.09 | 8.12 | 13.25 | 4.87 | 6.80 |
| Model_3 | 11.62 | 13.98 | 4.01 | 6.625 | 2.65 | 3.25 |
| Model | KAZE | Haar | Improved Haar | |||
|---|---|---|---|---|---|---|
| Model_1 | 3.43 | 3.76 | 1.48 | 1.96 | 0.74 | 0.90 |
| Model_2 | 4.20 | 5.59 | 1.85 | 8.00 | 1.52 | 1.93 |
| Model_3 | 3.35 | 3.24 | 2.53 | 1.79 | 0.88 | 1.22 |
| Model | General | Similarity | ||
|---|---|---|---|---|
| Model_1 | 3.25 | 3.00 | 1.625 | 1.75 |
| Model_2 | 4.87 | 5.50 | 2.68 | 2.75 |
| Model_3 | 5.50 | 5.63 | 3.35 | 1.75 |
| Model_4 | 14.22 | 10.74 | 5.65 | 5.48 |
| Model | General | Similarity | ||
|---|---|---|---|---|
| Model_1 | 1.96 | 1.73 | 0.83 | 0.64 |
| Model_2 | 1.47 | 3.15 | 1.15 | 0.74 |
| Model_3 | 1.32 | 2.64 | 0.90 | 0.69 |
| Model_4 | 9.46 | 9.12 | 1.93 | 1.80 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, W.; Chen, Y.; Liang, S. Sparse Haar-Like Feature and Image Similarity-Based Detection Algorithm for Circular Hole of Engine Cylinder Head. Appl. Sci. 2018, 8, 2006. https://doi.org/10.3390/app8102006
Zhou W, Chen Y, Liang S. Sparse Haar-Like Feature and Image Similarity-Based Detection Algorithm for Circular Hole of Engine Cylinder Head. Applied Sciences. 2018; 8(10):2006. https://doi.org/10.3390/app8102006
Chicago/Turabian StyleZhou, Wenzhang, Yong Chen, and Siyuan Liang. 2018. "Sparse Haar-Like Feature and Image Similarity-Based Detection Algorithm for Circular Hole of Engine Cylinder Head" Applied Sciences 8, no. 10: 2006. https://doi.org/10.3390/app8102006
APA StyleZhou, W., Chen, Y., & Liang, S. (2018). Sparse Haar-Like Feature and Image Similarity-Based Detection Algorithm for Circular Hole of Engine Cylinder Head. Applied Sciences, 8(10), 2006. https://doi.org/10.3390/app8102006