A Real-Time Hydrodynamic-Based Obstacle Avoidance System for Non-holonomic Mobile Robots with Curvature Constraints


Abstract
:1. Introduction
- (i)
- Streamlines are rich, thus, enabling the selection of appropriate paths for the planner. The desired state trajectory to be followed by a robot is determined only by the input defined by HPFs, i.e., along a streamline-based trajectory compatible with the kinodynamic constraints of the motion, even in high-speed motion [12].
- (ii)
- In many applications, the smoothness of trajectories is essential. Trajectories generated by HPF approaches are the integral curves of the gradient vector field of HPF. The trajectories that are smooth are readily executable.
- (iii)
- Streamlines can be computed offline systematically based on prior obstacle information (distribution, i.e., shape, size, location, and number) without the waypoints and path primitives, thus, being more predictable.
- (iv)
2. The Mobile Robot with Range Sensors
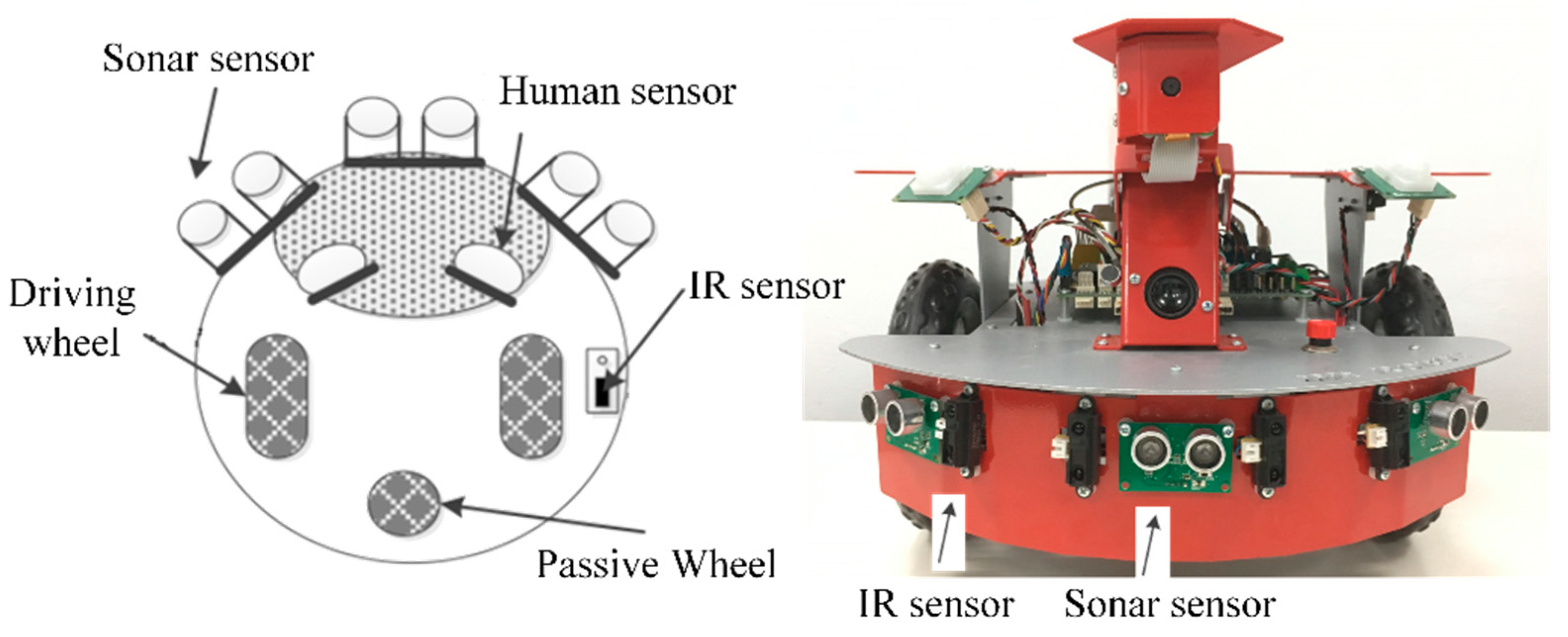
2.1. Wheeled Mobile Robot System
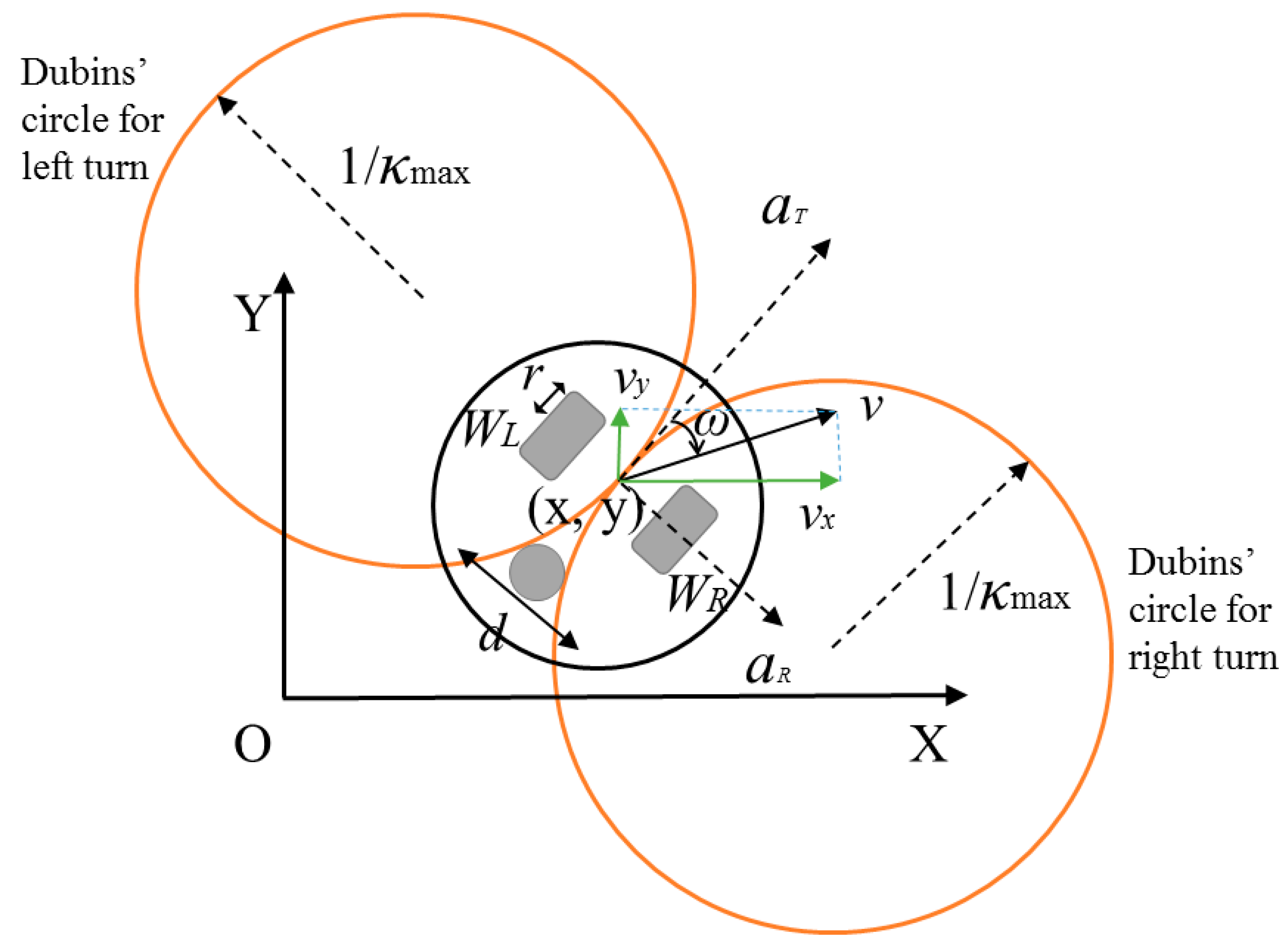
2.2. Kinematic Model
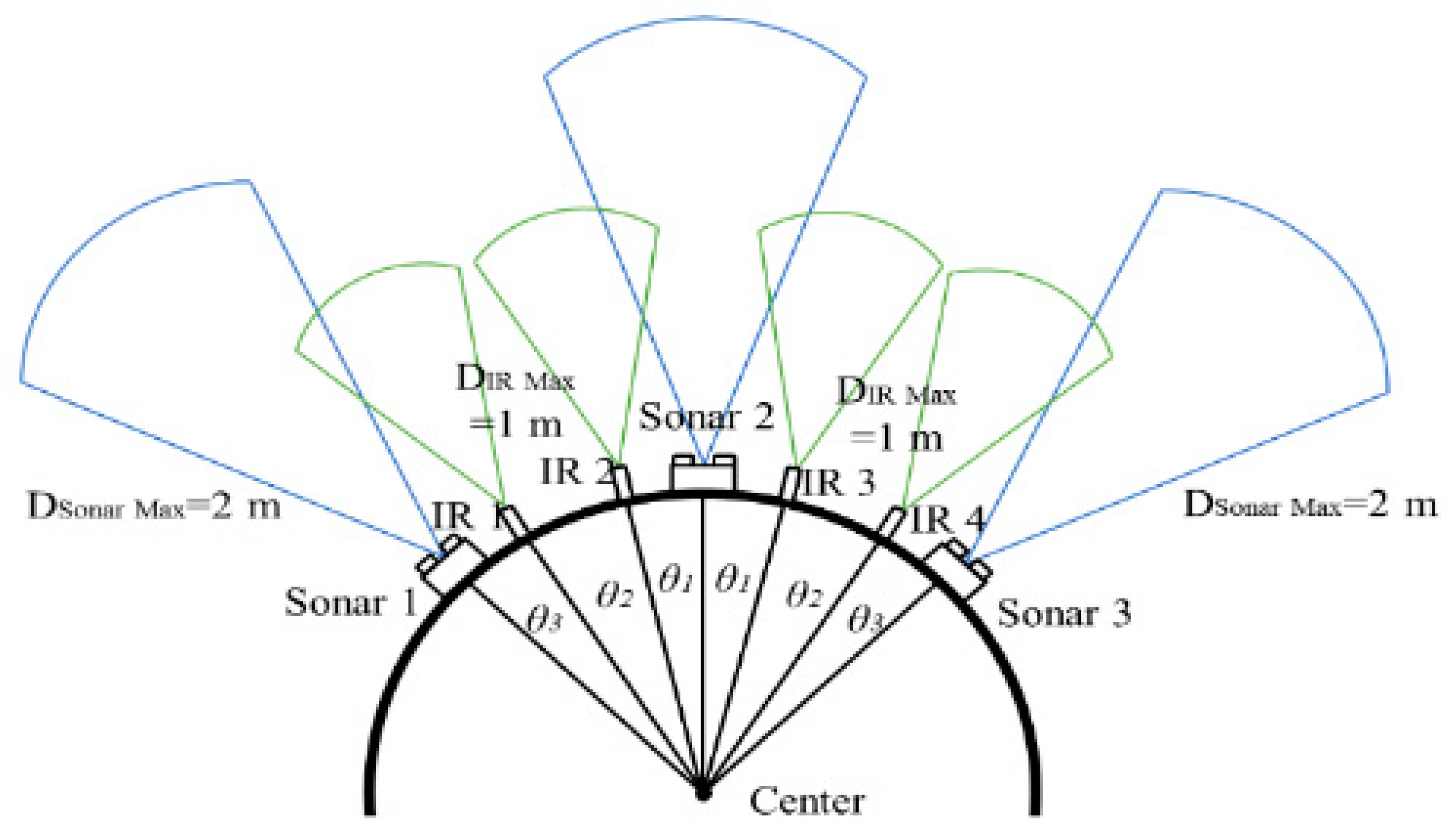
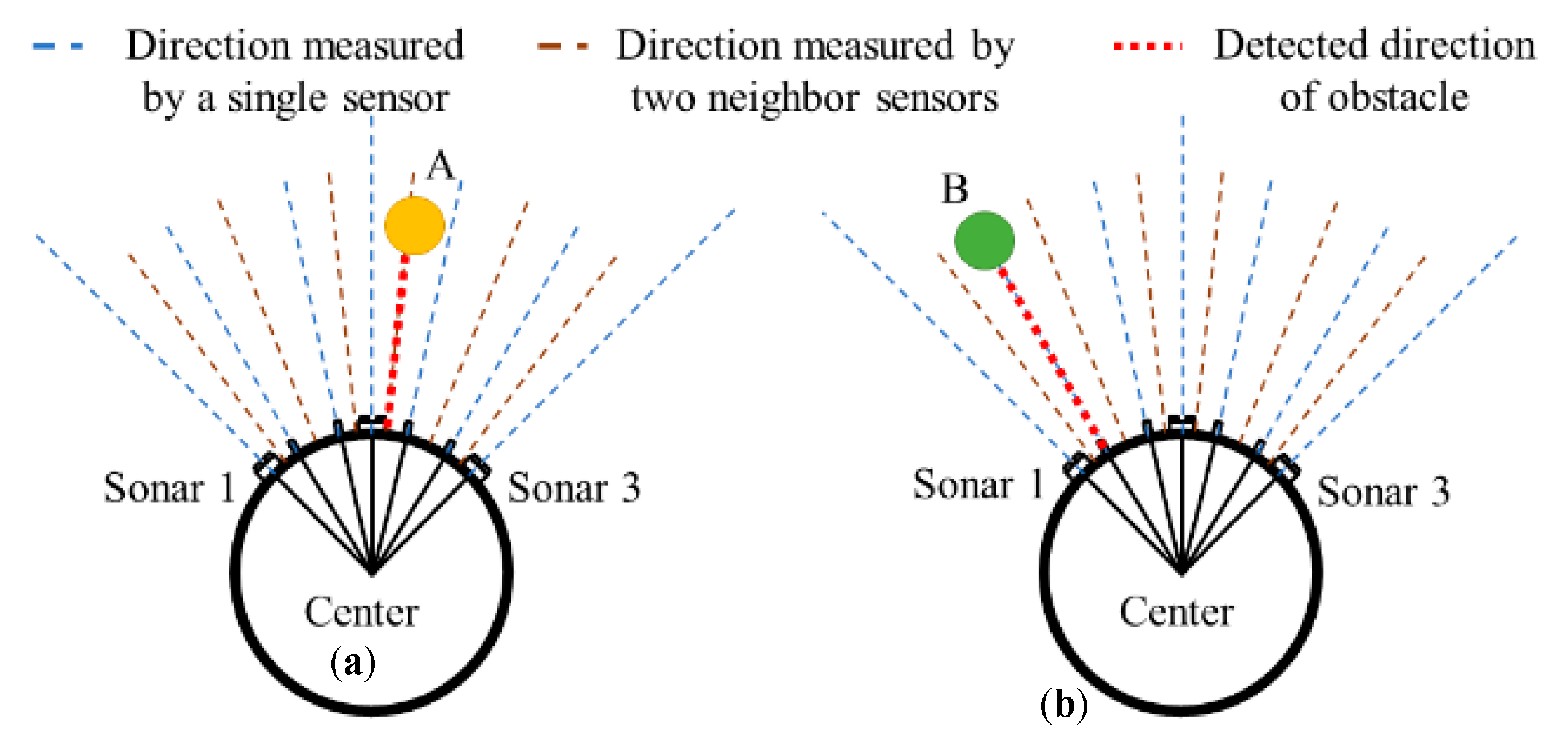
2.3. Obstacle Detector
3. Obstacle Avoidance Model by Harmonic Potential Field with Curvature Constraint
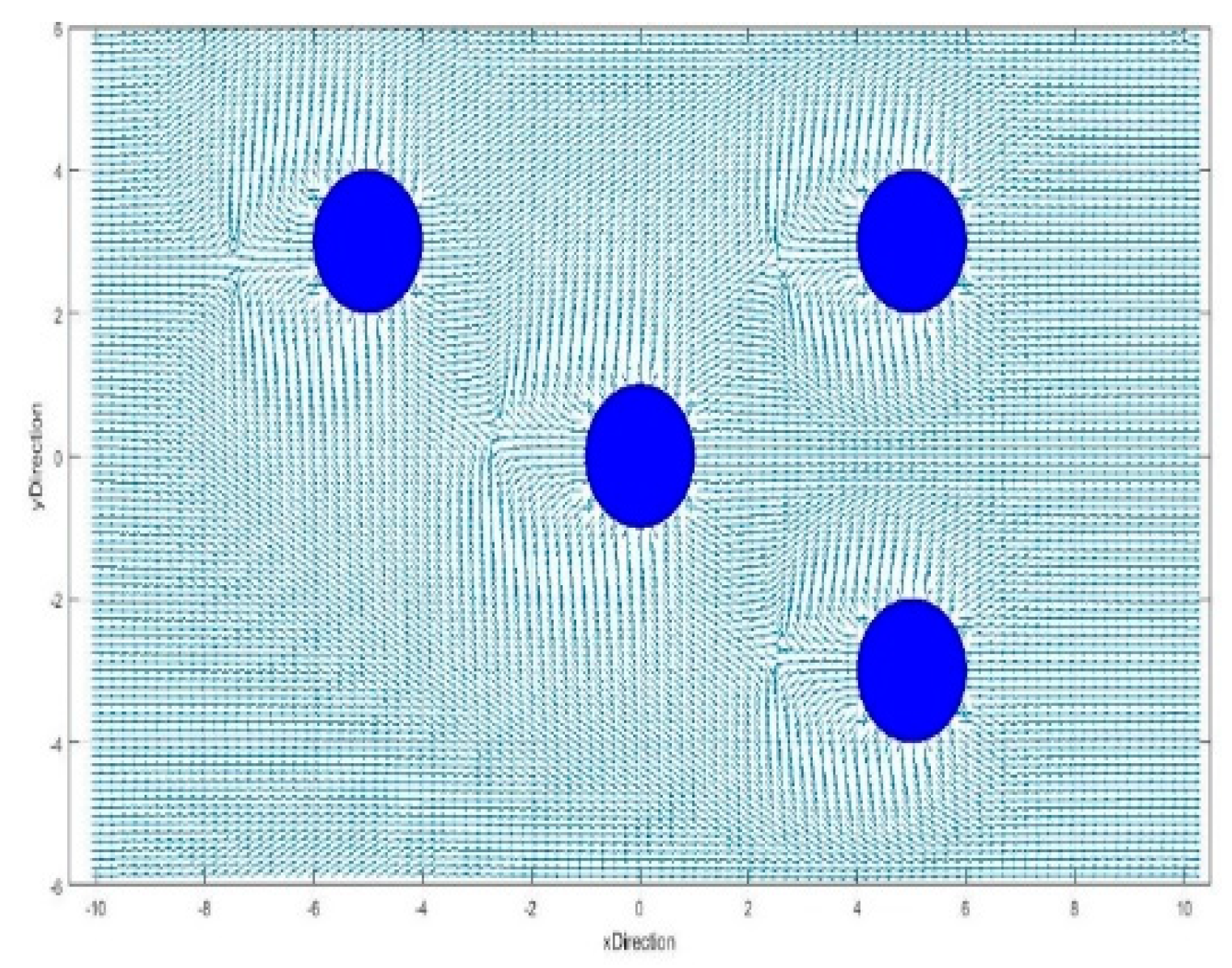
3.1. Harmonic Potential Function and Streamlines
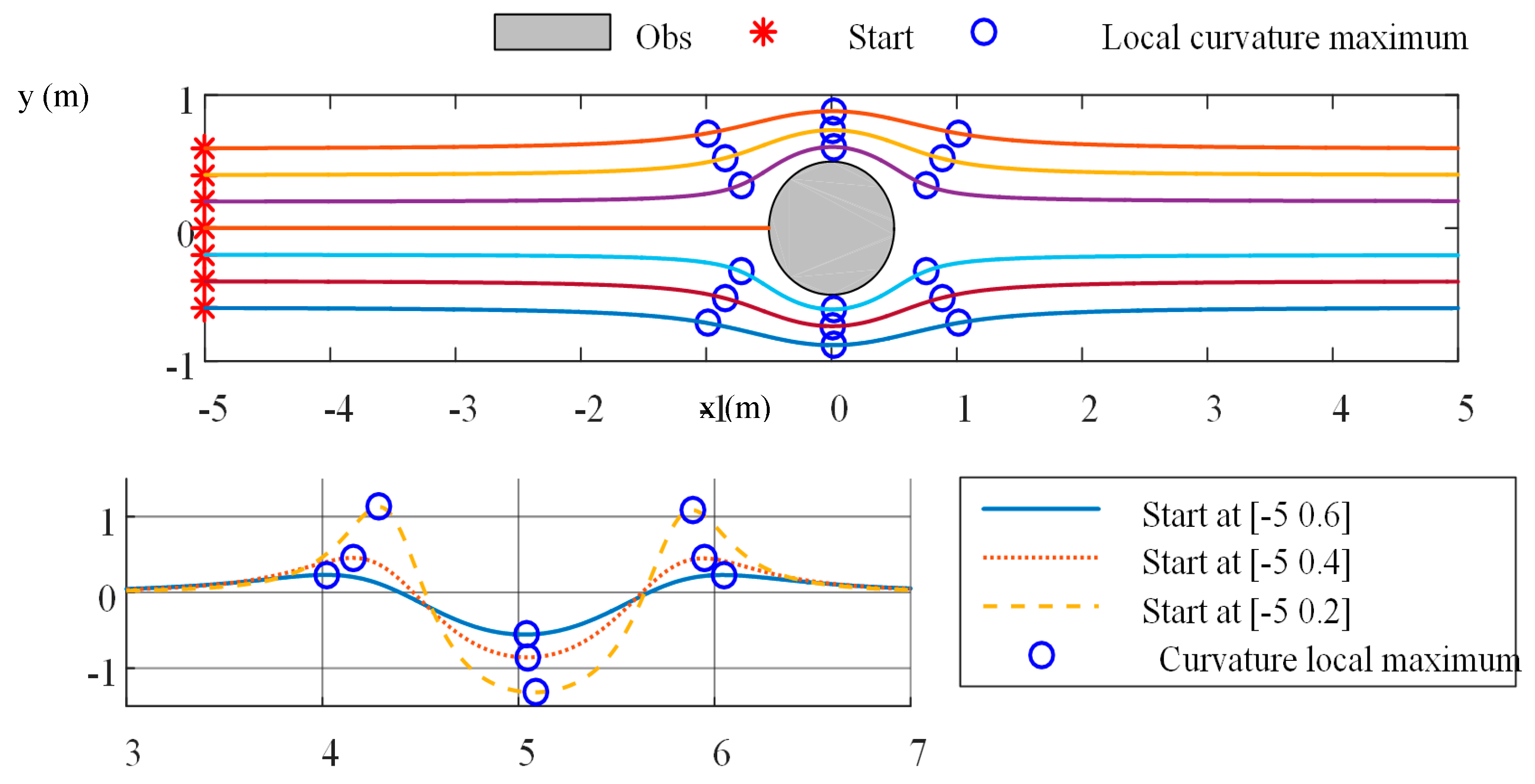
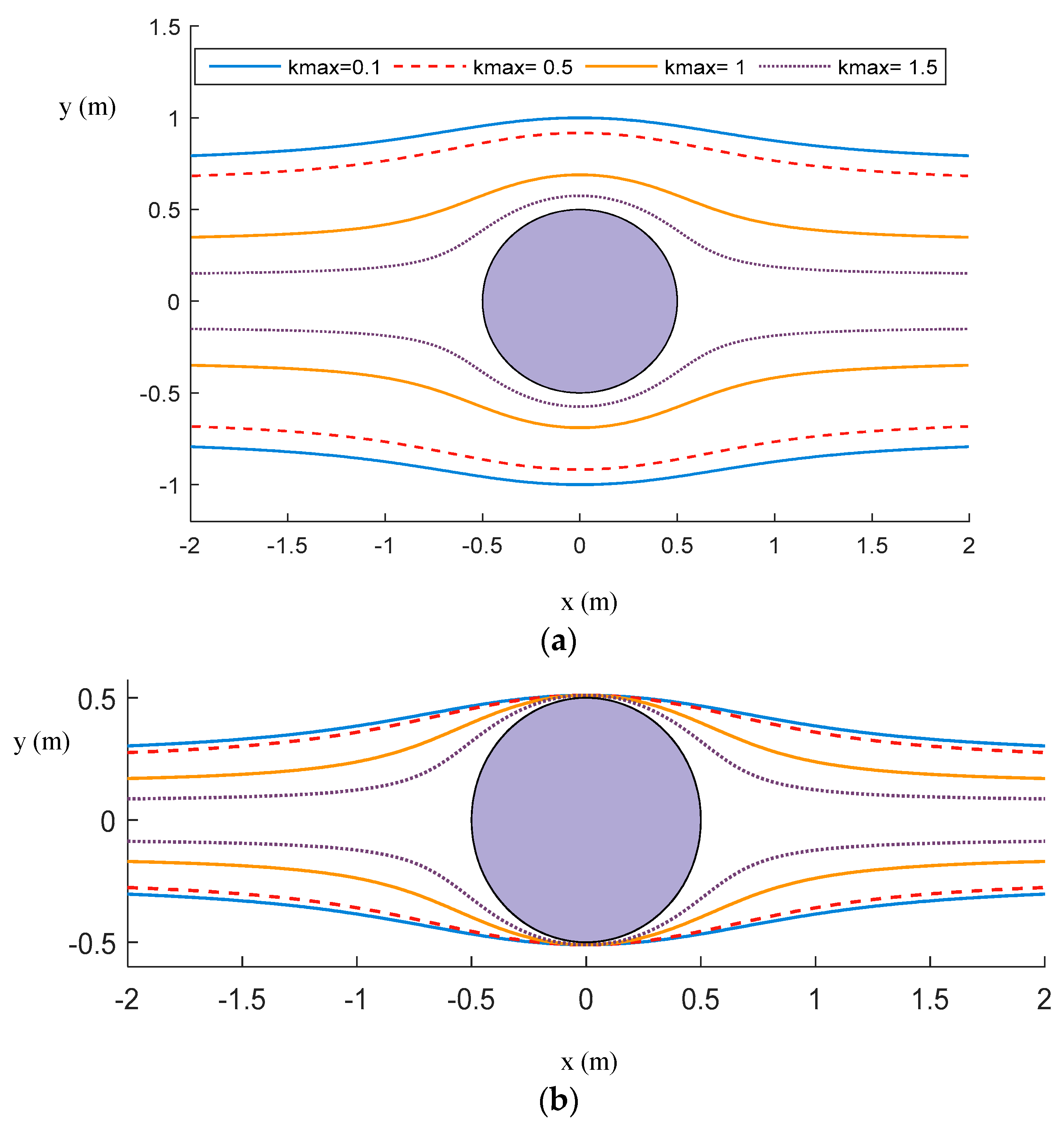
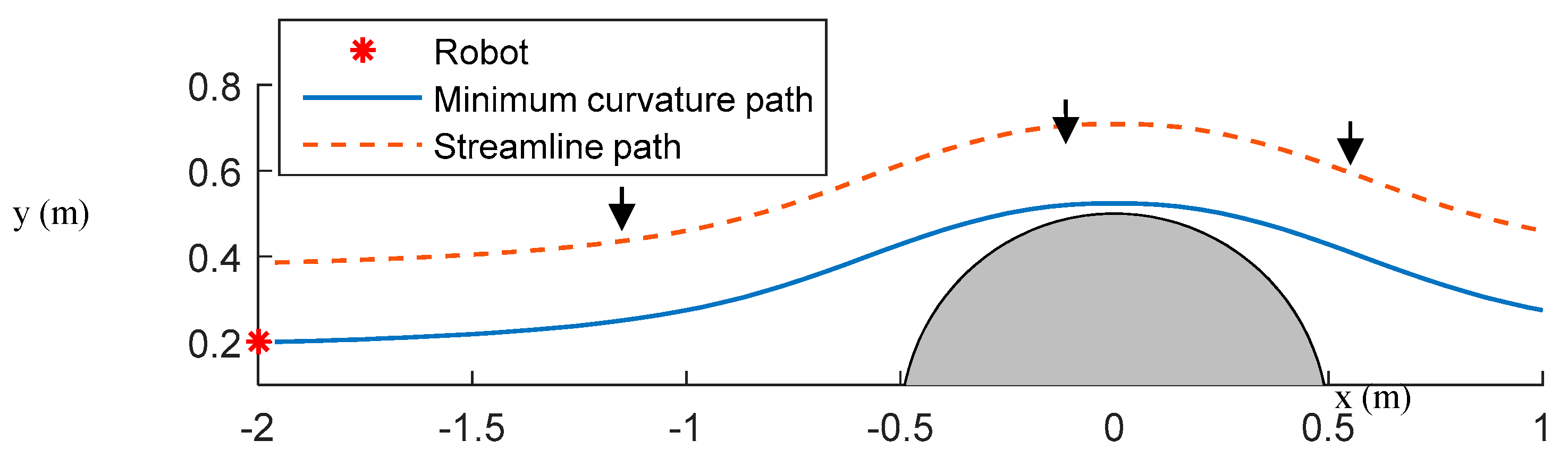
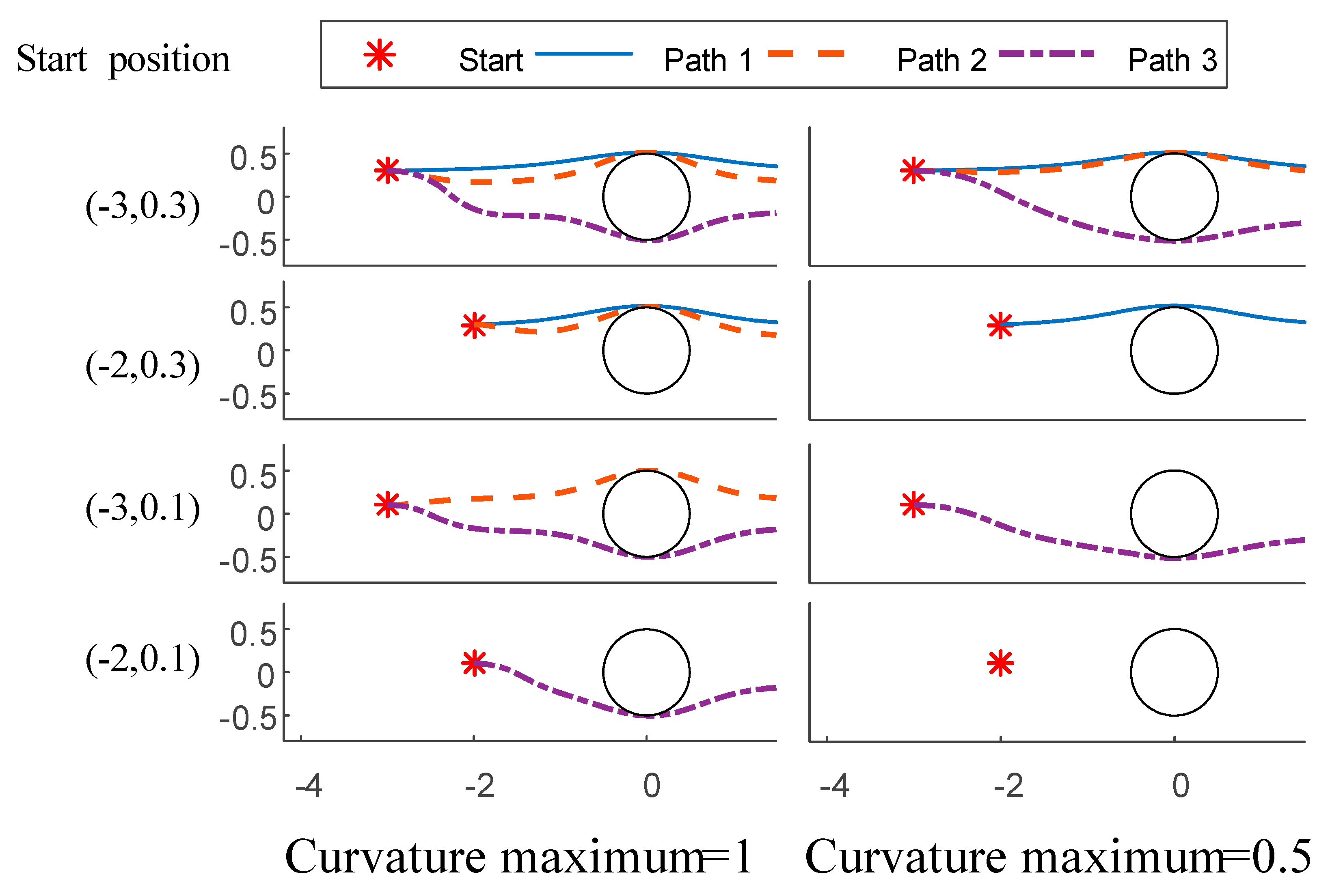
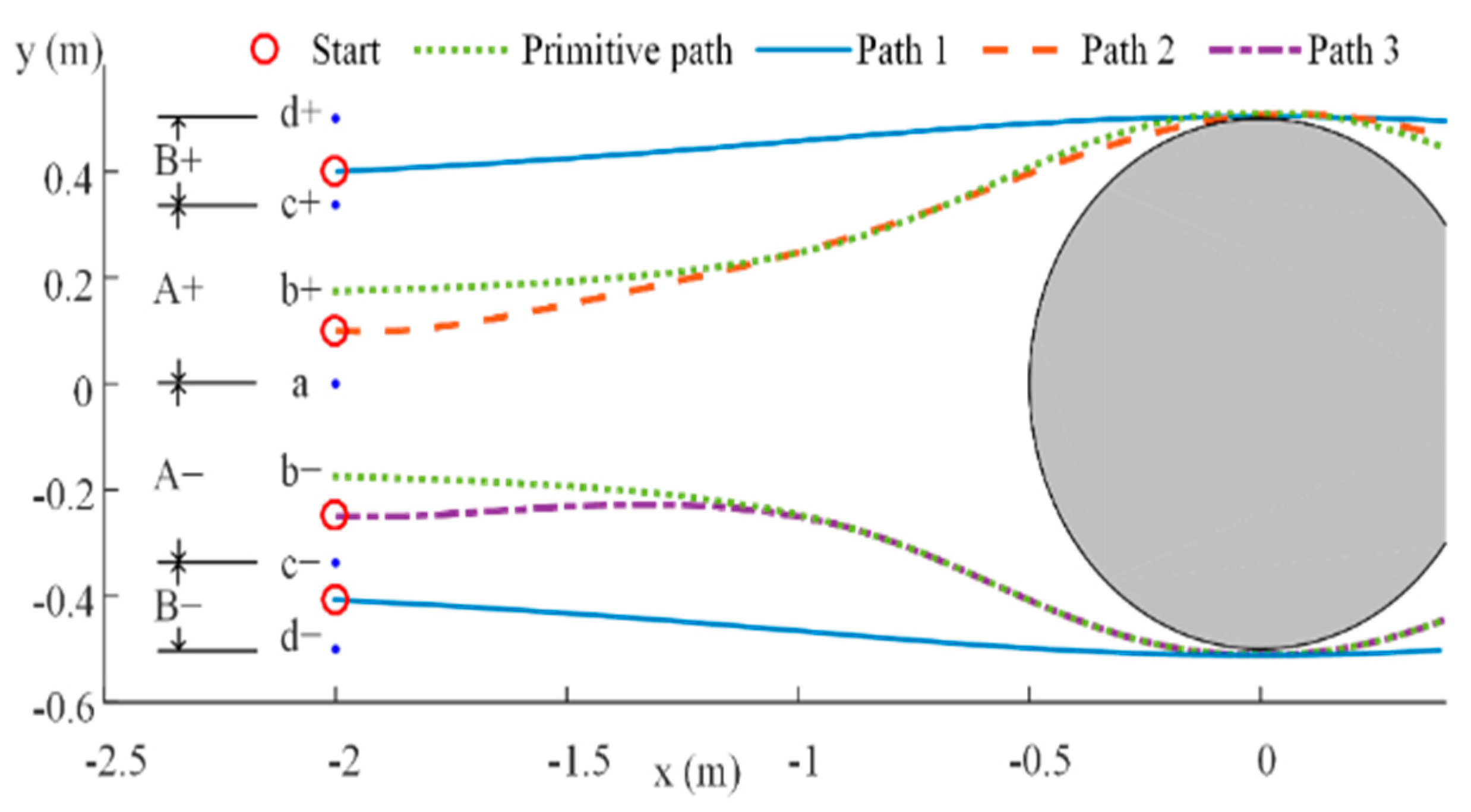
3.2. Three Primitive Paths with Curvature Constraint
| Algorithm 1.Bisection for searchingyLow_max, yLow_min |
| Input: Maximum allowed curvature , a circular obstacle with center (0,0) and radius a Output: Maximum curvature point y in the y-axis and its curvature //First find (i) yLow_max whose curvature is not larger than then find (ii) yLow_min whose curvature is . While // endwhile //Curvature maximum point is found by binary search on the interval [yHigh,yLow] While //ε: tolerance If then yLow = y Else yHigh = y end if end while return y |
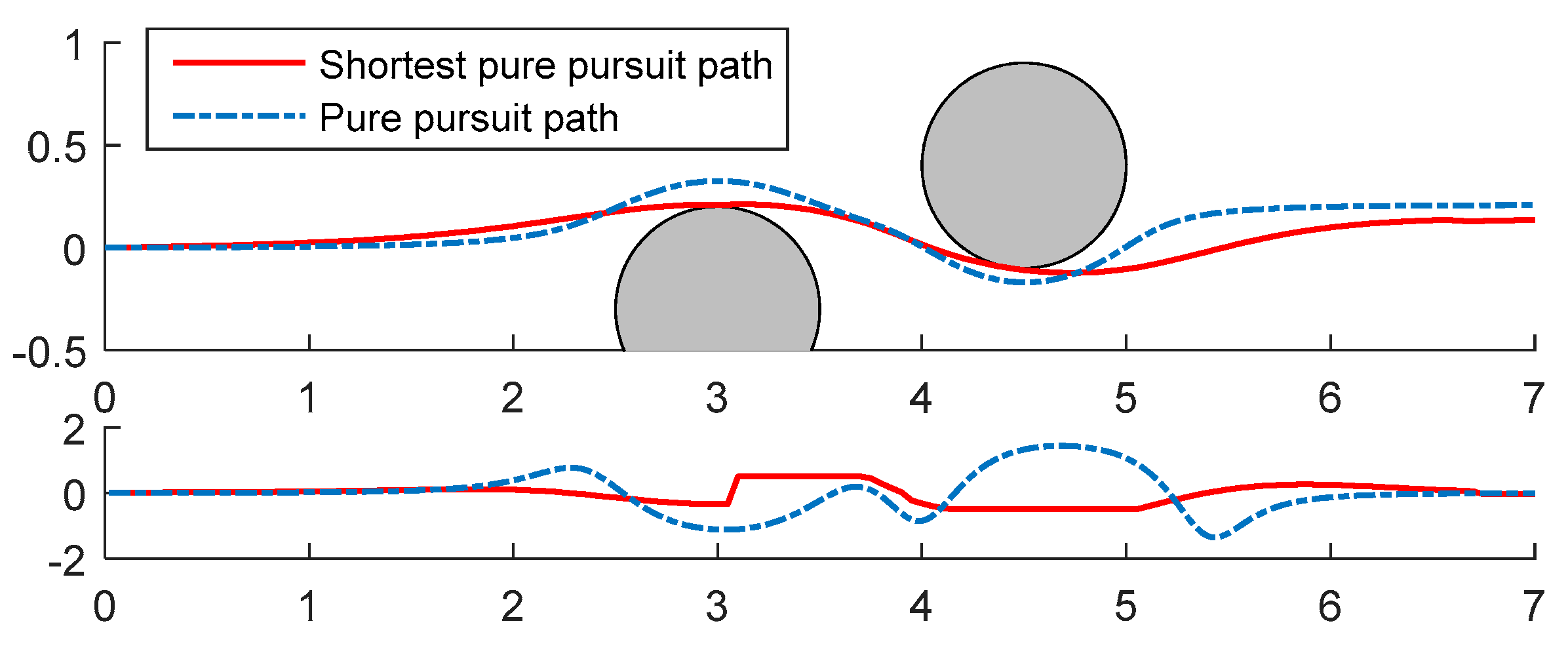
3.3. Distance-Based Obstacle-Avoiding Path Selecting Strategy
4. Real-Time Streamline-Based Obstacle Avoidance Strategy
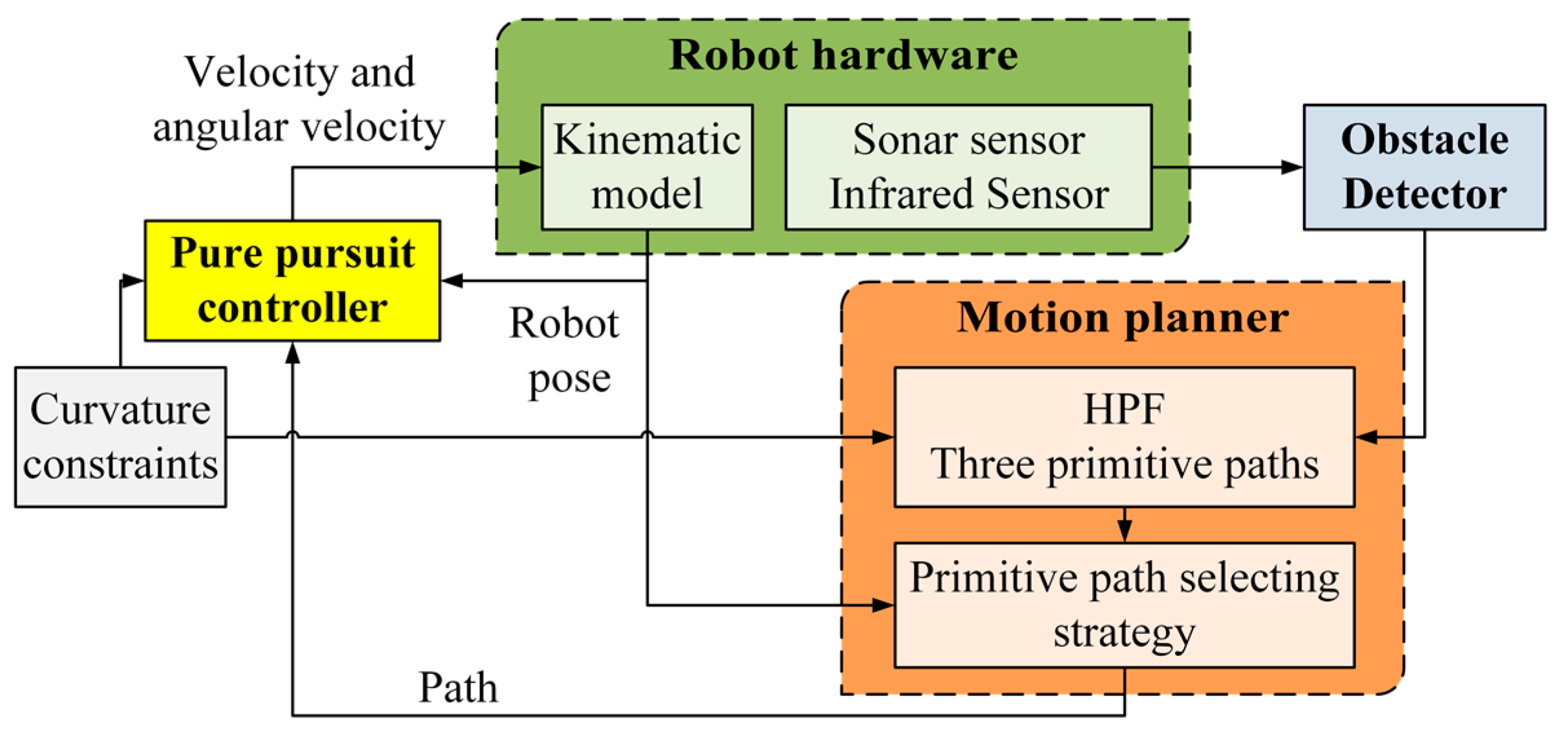
4.1. Overview of the Obstacle Avoidance System
4.2. Pure Pursuit Controller for Mobile Robots
| Algorithm 2. The pure pursuit streamline path. |
| Input: robot initial pose, target streamline path, look-ahead distance, maximum allowable curvature Output: status, pursuit path While (not timeout or status) do let represent the transformation to robot coordinate pClosest← {(x, y)|min{|(x, y)–poseRobot|} and (x, y) in pursuitpath} ← {(x, y) | min{|(x, y) − pClosest|} and (x, y) in pursuit path after pClosest} (9) Calculate the curvature ← Regularize the curvature constraints (Equation (14)) Set the steering angle of the robot (Equation (13)) Update robot’s heading direction, poseRobot if poseRobot and curvature == streamline path do status←TRUE store path into pathArray if collide with obstacle do status←FALSE end while |
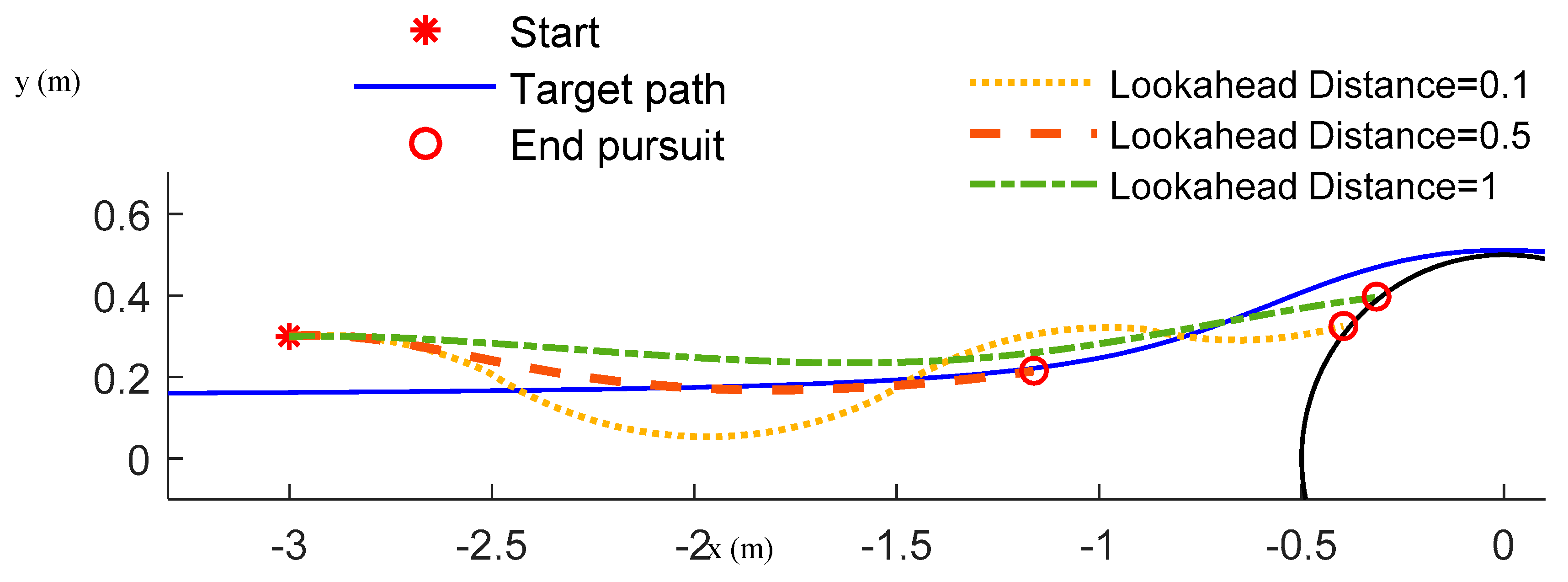
4.3. Setting Lookahead Distance
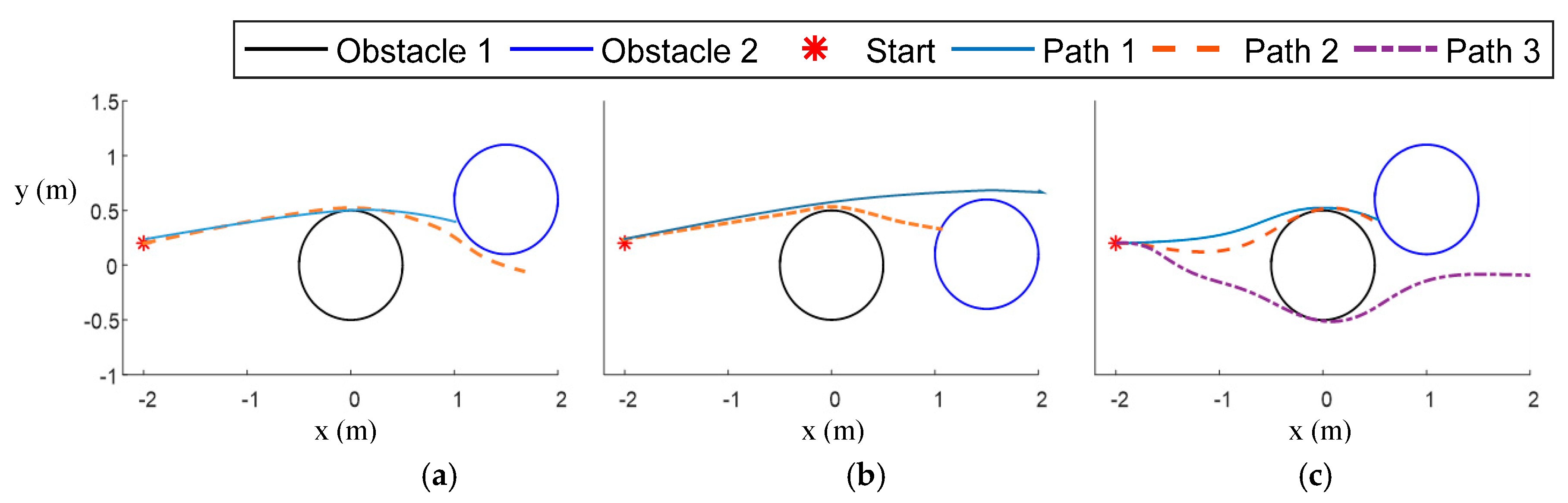
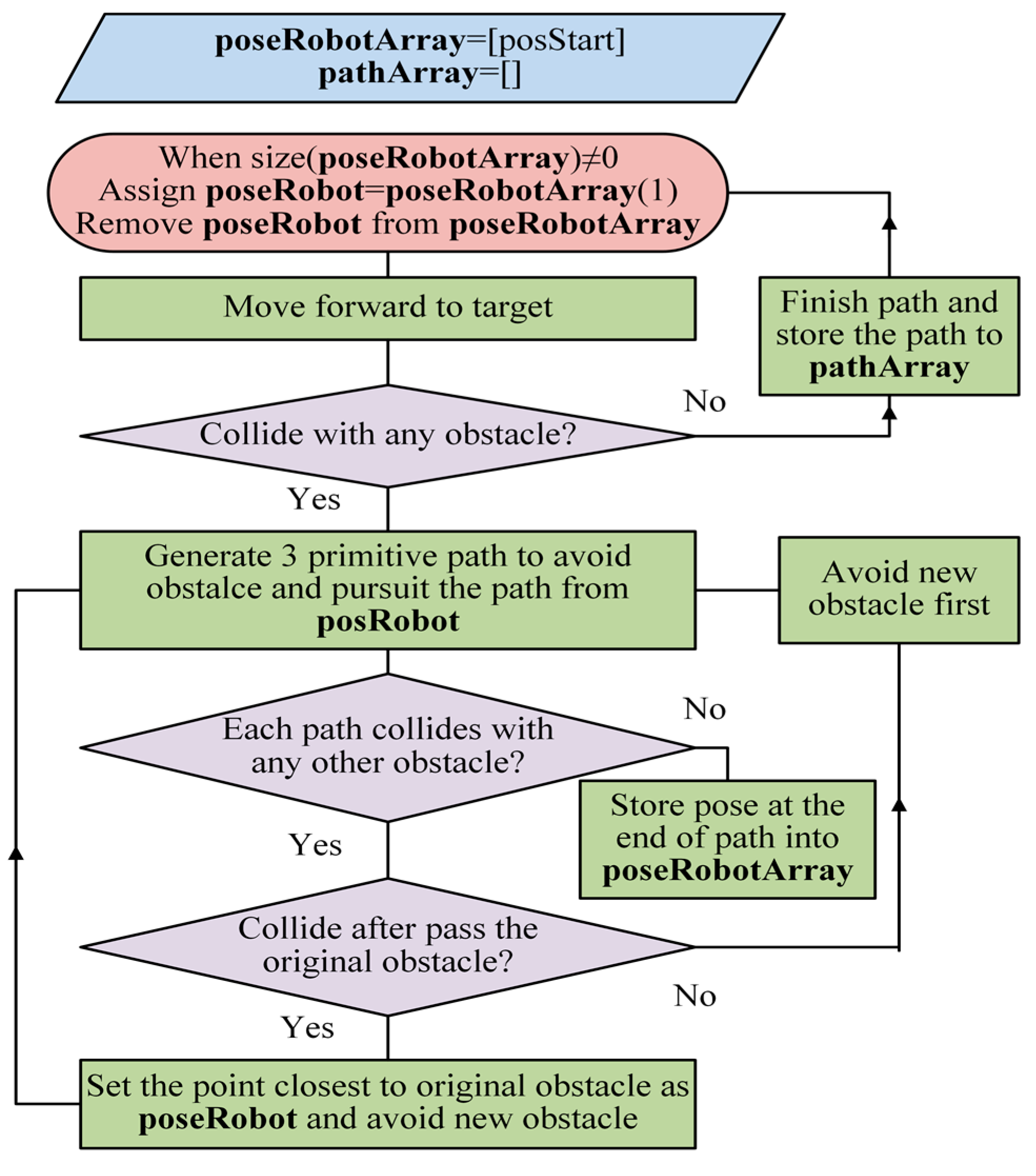
4.4. Multiple Obstacles Avoidance Strategies
5. Comparisons and Experiment
- -
- Pure pursuit method vs. lane hopping method
- -
- Multiple obstacles environment
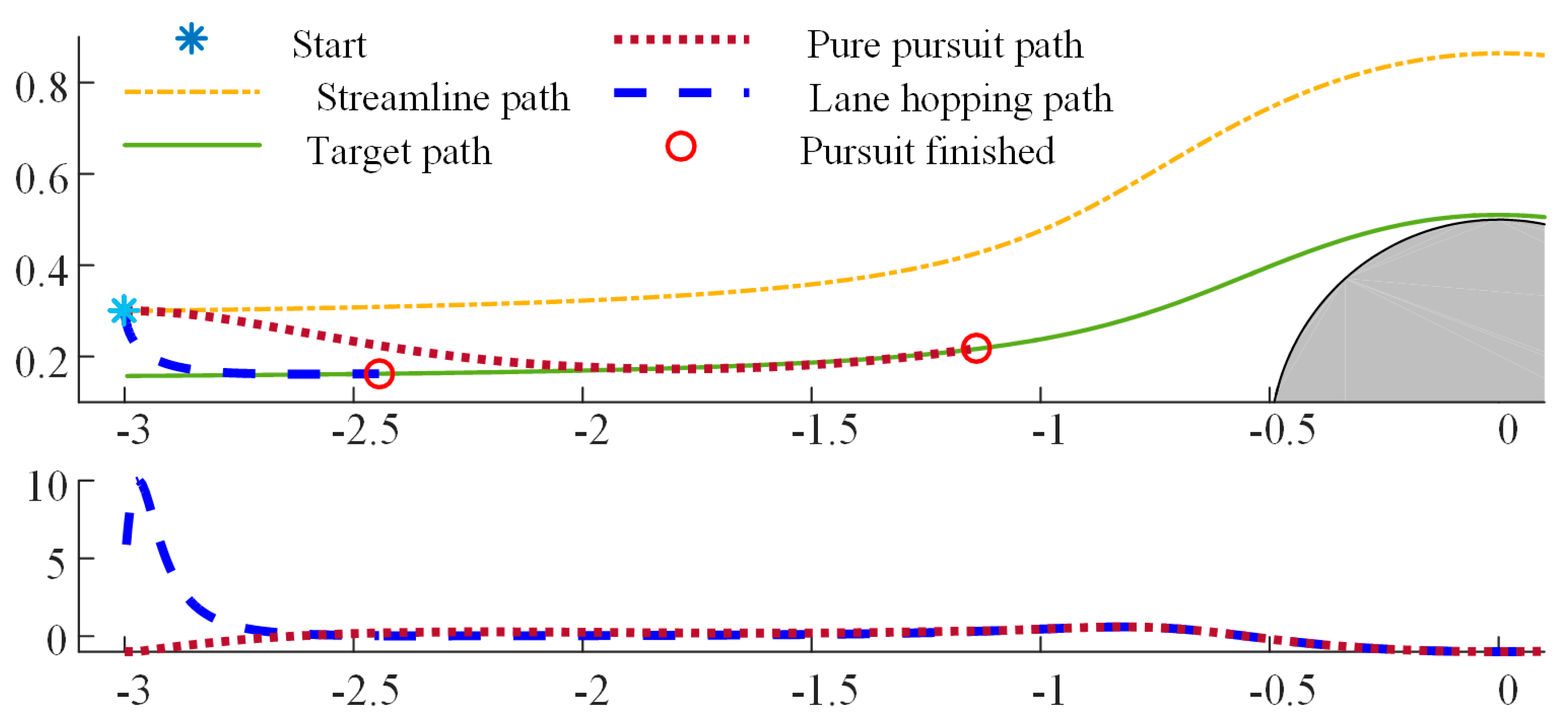
5.1. Comparison of the Pure Pursuit Method and Lane Hopping Method
5.2. Multi-Obstacles Environment
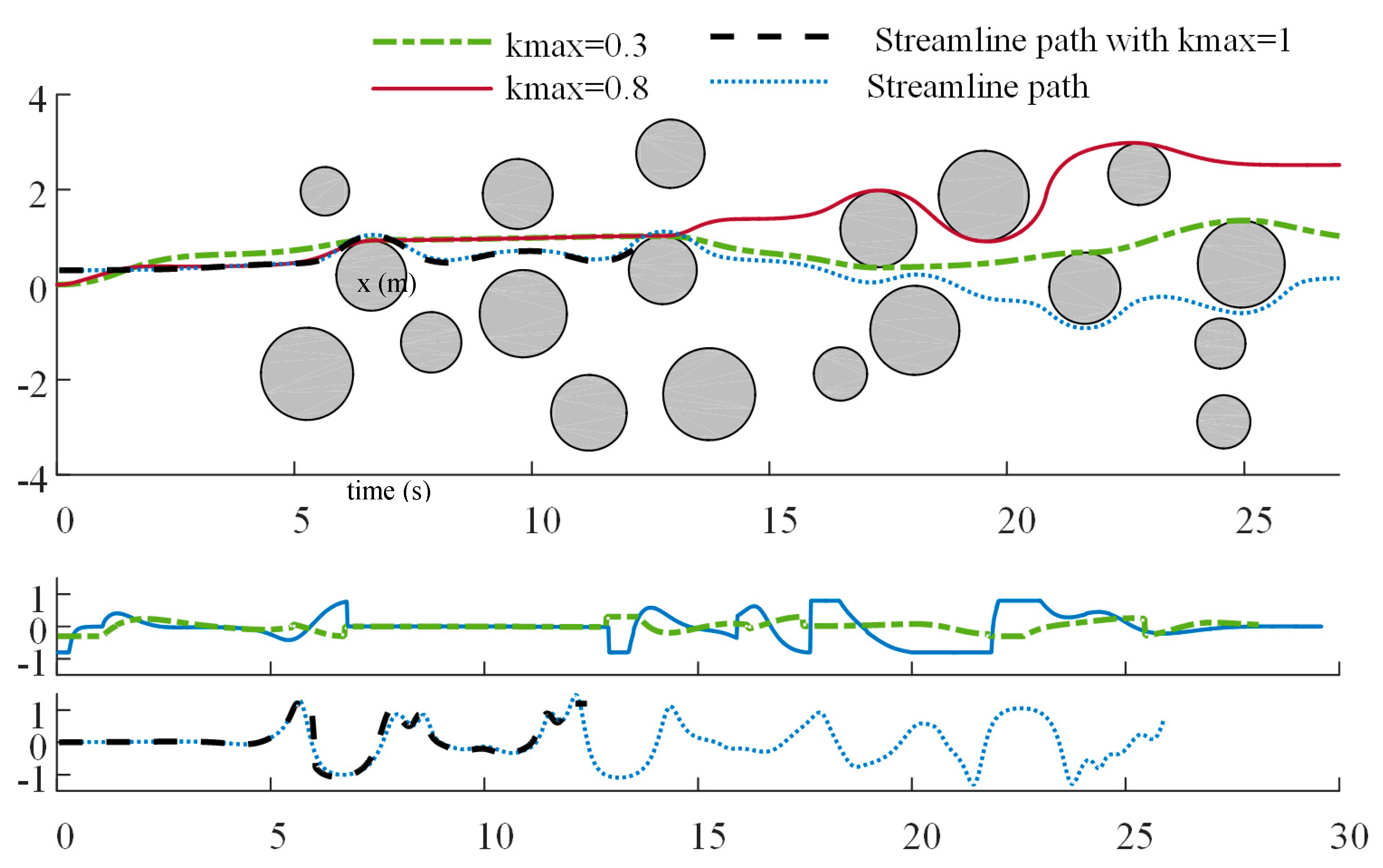
5.2.1. Comparison with Streamline Path by Weighting Velocity of Each Single Obstacle
5.2.2. Clutter Case: Comparison with Lau’s Approach
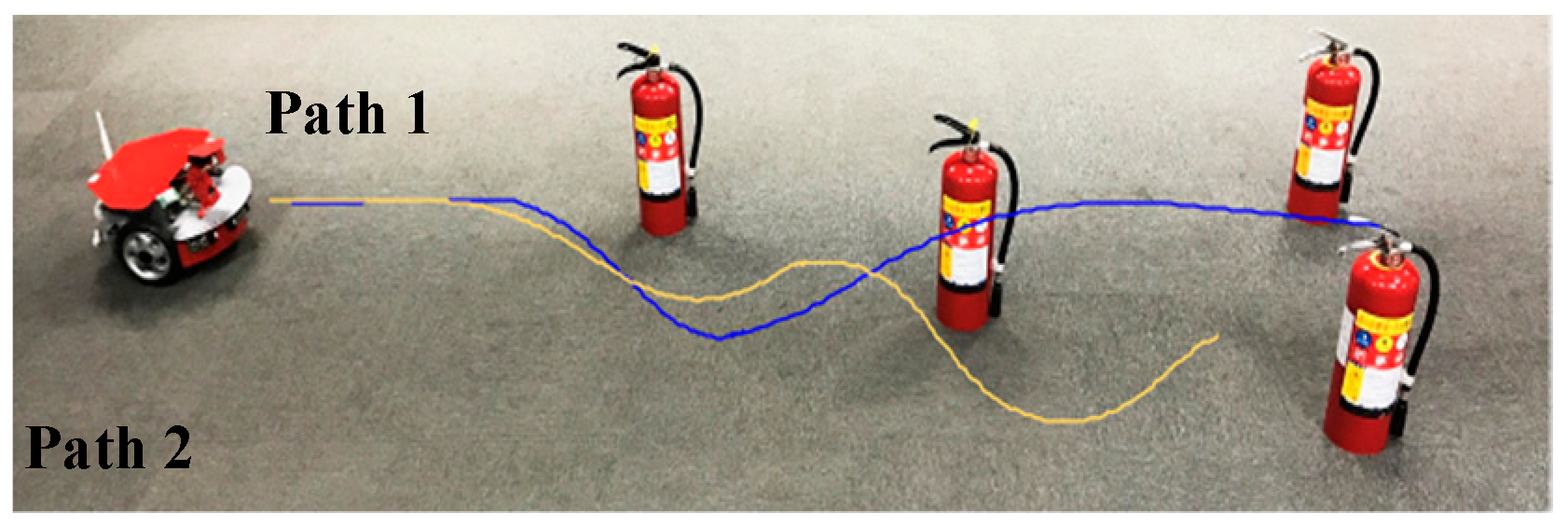
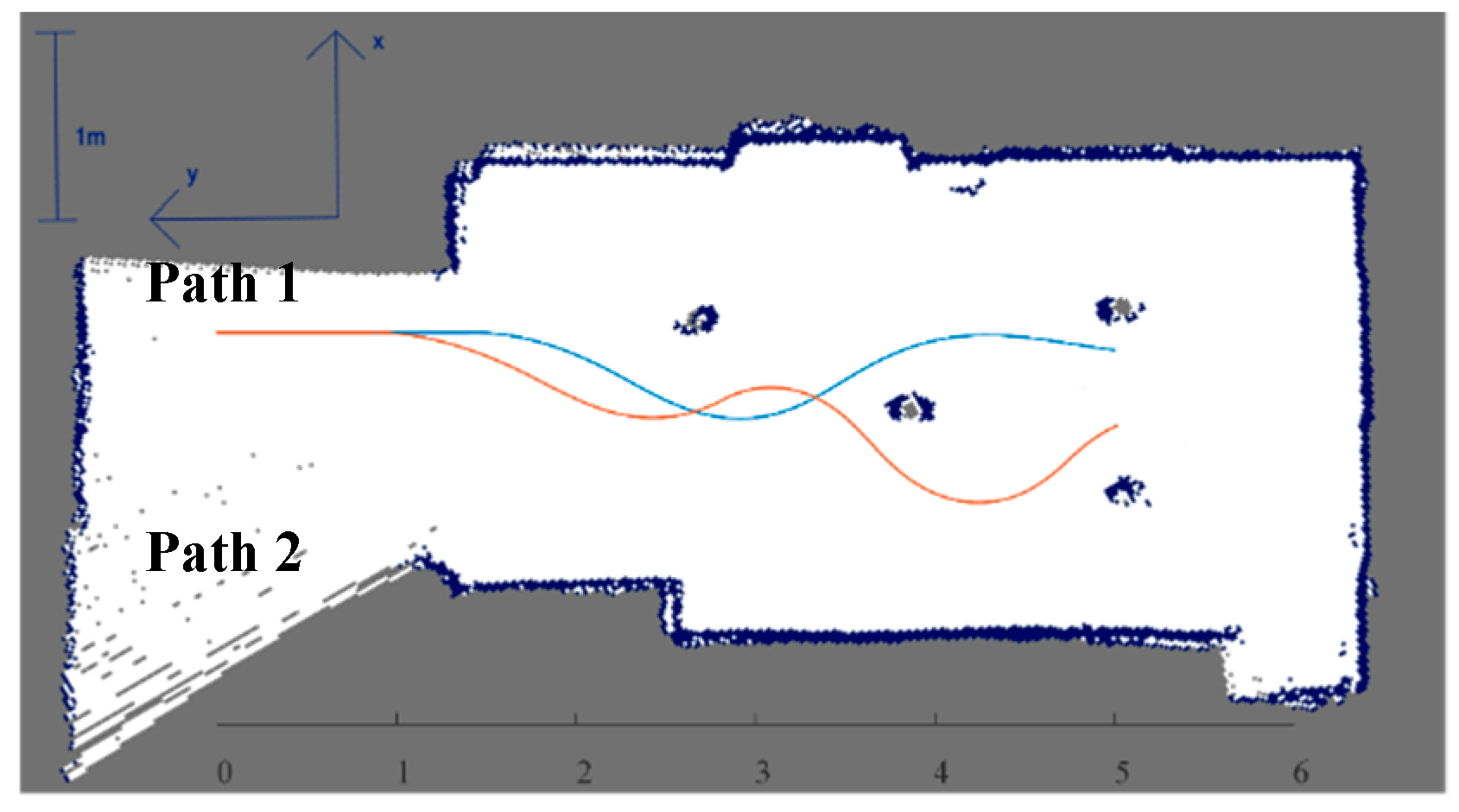
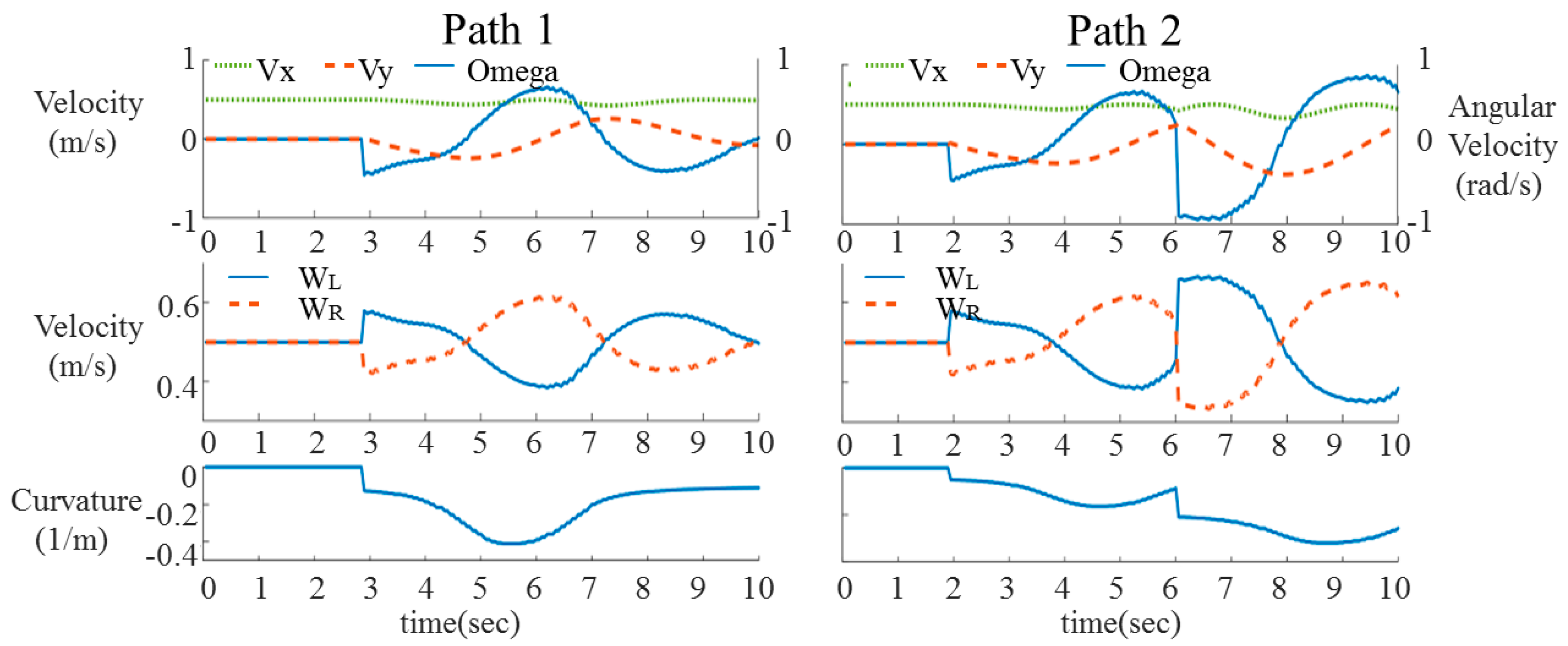
5.3. Proof of Concept Experiment and Discussion
5.3.1. Experimental Setting
5.3.2. Online static cylinder obstacles avoidance
- (i)
- We do not consider the navigation between very tight spaces, thus, the obstacles are arranged far apart to avoid the difficulty of APF-based navigation within a narrow passage. We arrange the clearance between any two adjacent obstacles smaller than the sensing range of the sensors but large enough to allow the pure pursuit algorithm to generate a local collision-free path for navigation. Specifically, the minimum distance between two obstacles’ centers is 2rObs = 0.8 m, wide enough for the robot to pass between two obstacles.
- (ii)
- The projection of all obstacles onto the ground plane is an identical circle, but the number of static obstacles and their locations are unknown.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Dong, J.F.; Sabastian, S.E.; Lim, T.M.; Li, Y.P. Autonomous In-door Vehicles. In Handbook of Manufacturing Engineering and Technology; Springer: London, UK, 2015. [Google Scholar]
- Adouane, L. Autonomous Vehicle Navigation: From Behavioral to Hybrid Multi-Controller Architectures; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Kunchev, V.; Jain, L.; Ivancevic, V.; Finn, A. Path planning and obstacle avoidance for autonomous mobile robots: A review. In Knowledge-Based Intelligent Information and Engineering Systems, Proceedings of the 10th International Conference, KES 2006, Bournemouth, UK, 9–11 October 2006; Springer: Berlin, Germany, 2006; pp. 537–544. [Google Scholar]
- Minguez, J.; Lamiraux, F.; Laumond, J.-P. Motion planning and obstacle avoidance. In Handbook of Robotics; Springer: Basel, Switzerland, 2016; pp. 1177–1202. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 500–505. [Google Scholar]
- Fahimi, F. Obstacle avoidance using harmonic potential functions. In Autonomous Robots; Springer: Boston, MA, USA, 2009; pp. 1–49. [Google Scholar]
- Connolly, C.I.; Grupen, R.A. On the applications of harmonicfunctionsto robotics. J. Robot. Syst. 1993, 10, 931–946. [Google Scholar] [CrossRef]
- Kaľavský, M.; Ferková, Ž. Harmonic potential field method for path planning of mobile robot. ICTIC 2012, 1, 41–46. [Google Scholar]
- Akishita, S.; Kawamura, S.; Hayashi, K. New navigation function utilizing hydrodynamic potential for mobile robot. In Proceedings of the IEEE International Workshop on Intelligent Motion Control, Istanbul, Turkey, 20–22 August 1990; pp. 413–417. [Google Scholar]
- Wray, K.H.; Ruiken, D.; Grupen, R.A.; Zilberstein, S. Log-space harmonic function path planning. In Proceedings of the IEEE/RSJ International Conference onIntelligent Robots and Systems, Daejeon, Korea, 9–14 October 2016; pp. 1511–1516. [Google Scholar]
- Waydo, S.; Murray, R.M. Vehicle motion planning using stream functions. In Proceedings of the IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 2484–2491. [Google Scholar] [Green Version]
- Daily, R.; Bevly, D.M. Harmonic potential field path planning for high speed vehicles. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4609–4614. [Google Scholar]
- Owen, T.; Hillier, R.; Lau, D. Smooth path planning around elliptical obstacles using potential flow for non-holonomic robots. In Robot Soccer World Cup; Springer: Berlin/Heidelberg, Germnay, 2011; pp. 329–340. [Google Scholar]
- Palm, R.; Driankov, D. Fluid mechanics for path planning and obstacle avoidance of mobile robots. In Proceedings of the 11th International Conference on Informatics in Control, Automation and Robotics (ICINCO), Vienna, Austria, 1–3 September 2014; pp. 231–238. [Google Scholar]
- Kim, J.O.; Khosla, P. Real-time obstacle avoidance using harmonic potential functions. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; pp. 790–796. [Google Scholar]
- Wang, H.; Lyu, W.; Yao, P.; Liang, X.; Liu, C. Three-dimensional path planning for unmanned aerial vehicle based on interfered fluid dynamical system. Chin. J. Aeronaut. 2015, 28, 229–239. [Google Scholar] [CrossRef]
- Connolly, C.I.; Grupen, R.A. Nonholonomic Path Planning Using Harmonic Functions; National Science Foundation: Alexandria, VA, USA, 1994.
- Lau, D.; Eden, J.; Oetomo, D. Fluid Motion Planner for Nonholonomic 3-D Mobile Robots with Kinematic Constraints. IEEE Trans. Robot. 2015, 31, 1537–1547. [Google Scholar] [CrossRef]
- Munson, B.R.; Young, D.F.; Okiishi, T.H. Fundamentals of Fluid Mechanics; Fowley, D., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1990. [Google Scholar]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; DTIC Document; Defense Technical Information Center: Fort Belvoir, WV, USA, 1992. [Google Scholar]
- Morales, J.; Martínez, J.L.; Martínez, M.A.; Mandow, A. Pure-pursuit reactive path tracking for nonholonomic mobile robots with a 2D laser scanner. EURASIP J. Adv. Signal Process. 2009, 2009, 935237. [Google Scholar] [CrossRef]
- Masoud, A.A. Kinodynamic motion planning. IEEE Robot. Autom. Mag. 2010, 17, 85–99. [Google Scholar] [CrossRef]
- Kohlbrecher, S.; von Stryk, O.; Meyer, J.; Klingauf, U. A flexible and scalable slam system with full 3d motion estimation. In Proceedings of the IEEE International Symposium on Safety, Security, and Rescue Robotics, Kyoto, Japan, 1–5 November 2011. [Google Scholar]
- Belabbas, M.A.; Liu, S. New method for motion planning for non-holonomic systems using partial differential equations. In Proceedings of the American Control Conference, Seattle, WA, USA, 24–26 May 2017; pp. 4189–4194. [Google Scholar]
- Gingras, D.; Dupuis, E.; Payre, G.; de Lafontaine, J. Path planning based on fluid mechanics for mobile robots using unstructured terrain models. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 1978–1984. [Google Scholar]
- Motonaka, K. Kinodynamic Motion Planning for a Two-Wheel-Drive Mobile Robot. In Handbook of Research on Biomimetics and Biomedical Robotics; IGI Global: Hershey, PA, USA, 2018; pp. 332–346. [Google Scholar]
- Liu, C.A.; Wei, Z.; Liu, C. A new algorithm for mobile robot obstacle avoidance based on hydrodynamics. In Proceedings of the IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 2310–2313. [Google Scholar]
- Golan, Y.; Edelman, S.; Shapiro, A.; Rimon, E. Online Robot Navigation Using Continuously Updated Artificial Temperature Gradients. IEEE Robot. Autom. Lett. 2017, 2, 1280–1287. [Google Scholar] [CrossRef]
- Louste, C.; Liégeois, A. Path planning for non-holonomic vehicles: a potential viscous fluid field method. Robotica 2002, 20, 291–298. [Google Scholar] [CrossRef]
- Pedersen, M.D.; Fossen, T.I. Marine vessel path planning & guidance using potential flow. IFAC Proc. Vol. 2012, 45, 188–193. [Google Scholar]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: New York, NY, USA, 2006. [Google Scholar]
- Tanner, H.G.; Loizou, S.; Kyriakopoulos, K.J. Nonholonomic stabilization with collision avoidance for mobile robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 1220–1225. [Google Scholar]
- Galick, M. The planning of optimal motions of non-holonomic systems. Nonlinear Dyn. 2017, 90, 2163–2184. [Google Scholar] [CrossRef] [Green Version]
- Li, L. Nonholonomic motion planning using trigonometric switch inputs. Int. J. Simul. Model. (IJSIMM) 2017, 16, 176–186. [Google Scholar] [CrossRef]
- Lamiraux, F.; Bonnafous, D. Reactive trajectory deformation for nonholonomic systems: Application to mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA, 11–15 May 2002; pp. 3099–3104. [Google Scholar]
- Kelly, A.; Nagy, B. Reactive nonholonomic trajectory generation via parametric optimal control. Int. J. Robot. Res. 2003, 22, 583–601. [Google Scholar] [CrossRef]
- Ho, Y.-J.; Liu, J.-S. Collision-free curvature-bounded smooth path planning using composite Bezier curve based on Voronoi diagram. In Proceedings of the IEEE International Symposium on Computational Intelligence in Robotics and Automation, Daejeon, Korea, 15–18 December 2009; pp. 463–468. [Google Scholar]
- Panagou, D. Motion planning and collision avoidance using navigation vector fields. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014; pp. 2513–2518. [Google Scholar]
- Papoutsidakis, M.; Piromalis, D.; Neri, F.; Camilleri, M. Intelligent algorithms based on data processing for modular robotic vehicles control. WSEAS Trans. Syst. 2014, 13, 242–251. [Google Scholar]
- Bekey, G.A. Autonomous Robots: From Biological Inspiration to Implementation and Control; MIT Press: Cambridge, MA, USA 2005. [Google Scholar]
- Lo, C.-W.; Wu, K.-L.; Lin, Y.-C.; Liu, J.-S. An intelligent control system for mobile robot navigation tasks in surveillance. In Robot Intelligence Technology and Applications 2; Springer: Berlin, Germany, 2014; pp. 449–462. [Google Scholar]
- Schoof, E.; Manzie, C.; Shames, I.; Chapman, A.; Oetomo, D. An experimental platform for heterogeneous multi-vehicle missions. In Proceedings of the International Conference on Science and Innovation for Land Power, Adelaide, Australia, 5–6 September 2018. [Google Scholar]
- Giftthaler, M.; Sandy, T.; Dörfler, K.; Brooks, I.; Buckingham, M.; Rey, G.; Kohler, M.; Gramazio, F.; Buchli, J. Mobile robotic fabrication at 1:1 scale: The in situ fabricator. Constr. Robot. 2017, 1, 3–14. [Google Scholar] [CrossRef]
- Rösmann, C.; Hoffmann, F.; Bertram, T. Integrated online trajectory planning and optimization in distinctive topologies. Robot. Auton. Syst. 2017, 88, 142–153. [Google Scholar] [CrossRef]
- Kano, H.; Fujioka, H. B-Spline Trajectory Planning with Curvature Constraint. In Proceedings of the Annual American Control Conference, Milwaukee, WI, USA, 27–29 June 2018; pp. 1963–1968. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wheel’s radius r | 12.5 (cm) |
| Distance between two wheels d | 25 (cm) |
| Robot radius rRobot | 20 (cm) |
| Height | 25.5 (cm) |
| Weight | 3.5 (kg) |
| Operating (U)/Max.speed | 0.5/1 (m/s) |
| Cycle time | 200 (ms) |
| Safety distance rSafe | 0.1 (m) |
| Curvature constraint | 1.5 (1/m) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kuo, P.-L.; Wang, C.-H.; Chou, H.-J.; Liu, J.-S. A Real-Time Hydrodynamic-Based Obstacle Avoidance System for Non-holonomic Mobile Robots with Curvature Constraints. Appl. Sci. 2018, 8, 2144. https://doi.org/10.3390/app8112144
Kuo P-L, Wang C-H, Chou H-J, Liu J-S. A Real-Time Hydrodynamic-Based Obstacle Avoidance System for Non-holonomic Mobile Robots with Curvature Constraints. Applied Sciences. 2018; 8(11):2144. https://doi.org/10.3390/app8112144
Chicago/Turabian StyleKuo, Pei-Li, Chung-Hsun Wang, Han-Jung Chou, and Jing-Sin Liu. 2018. "A Real-Time Hydrodynamic-Based Obstacle Avoidance System for Non-holonomic Mobile Robots with Curvature Constraints" Applied Sciences 8, no. 11: 2144. https://doi.org/10.3390/app8112144
APA StyleKuo, P. -L., Wang, C. -H., Chou, H. -J., & Liu, J. -S. (2018). A Real-Time Hydrodynamic-Based Obstacle Avoidance System for Non-holonomic Mobile Robots with Curvature Constraints. Applied Sciences, 8(11), 2144. https://doi.org/10.3390/app8112144