Time-Domain Hydro-Elastic Analysis of a SFT (Submerged Floating Tunnel) with Mooring Lines under Extreme Wave and Seismic Excitations



Abstract
:1. Introduction
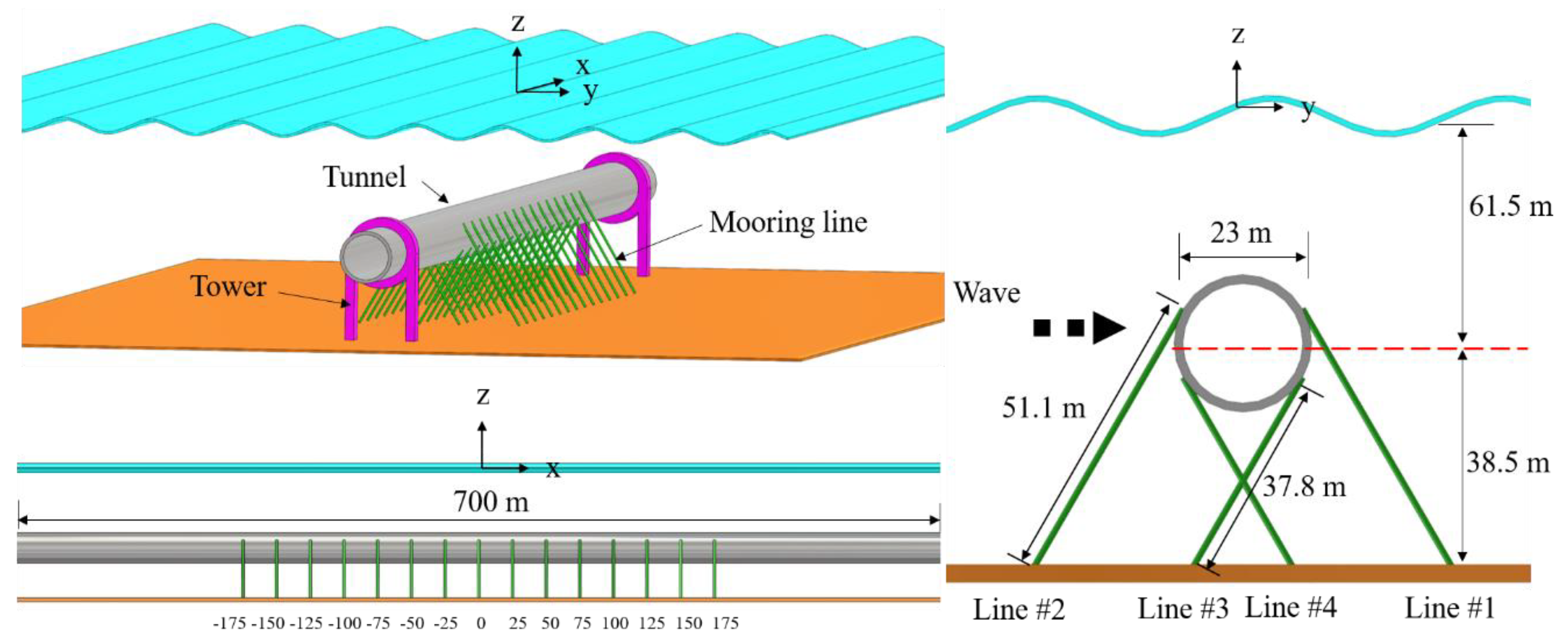
2. Configuration of the System
3. Numerical Model
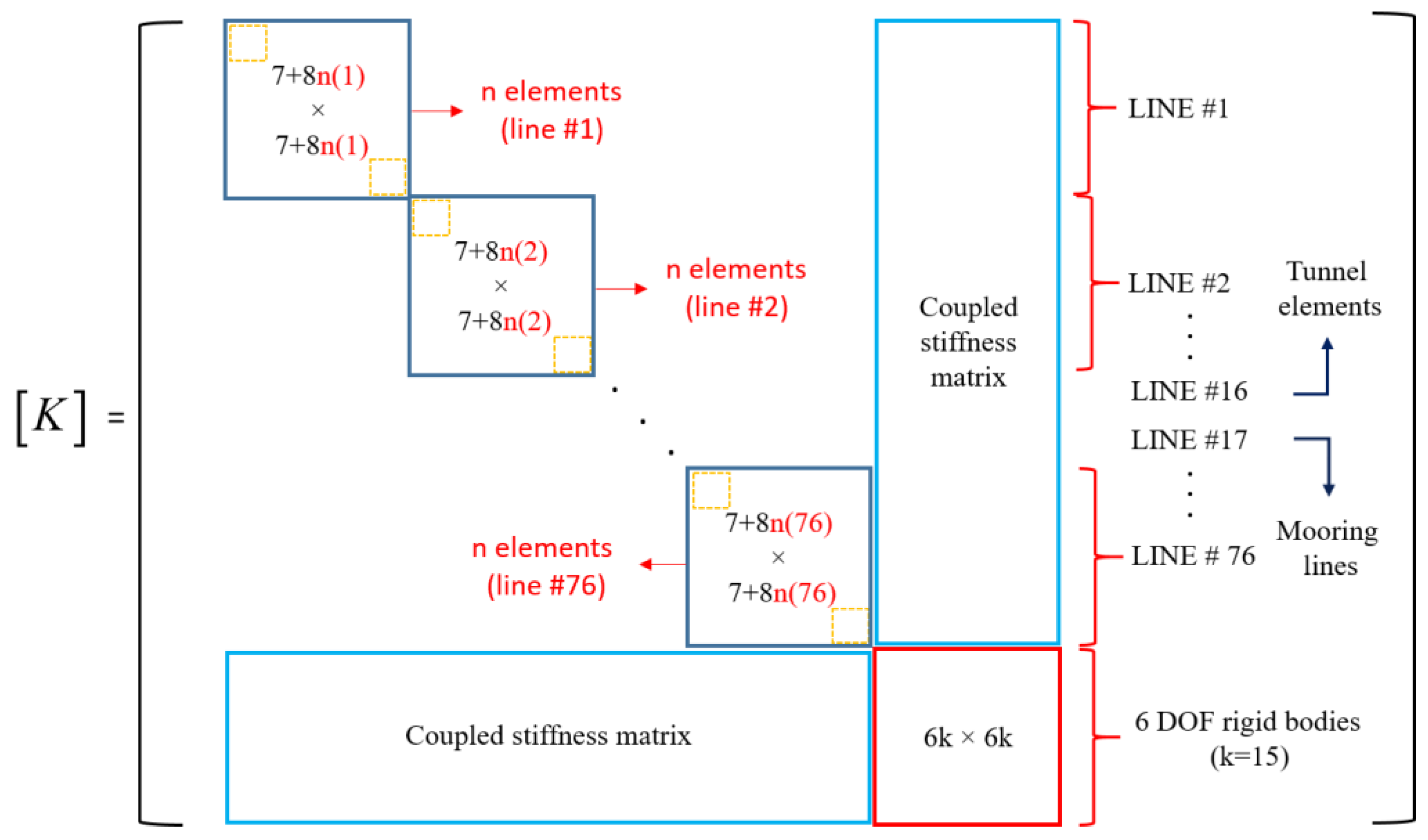
3.1. Governing Equations of Dynamic Simulation
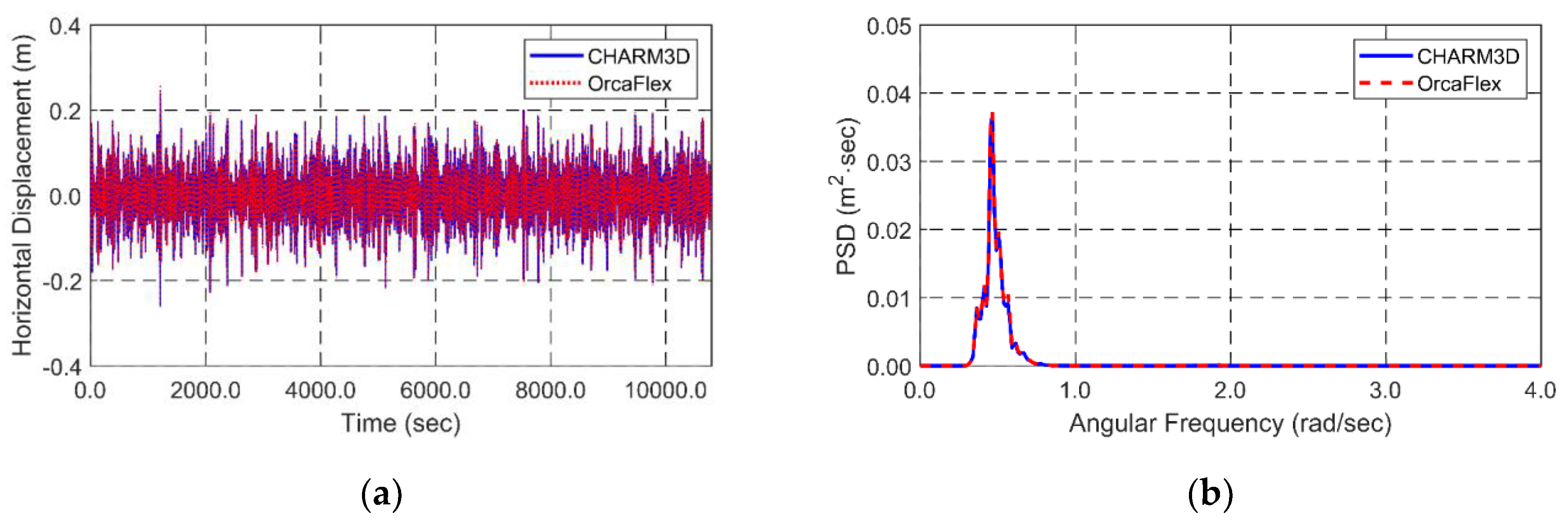
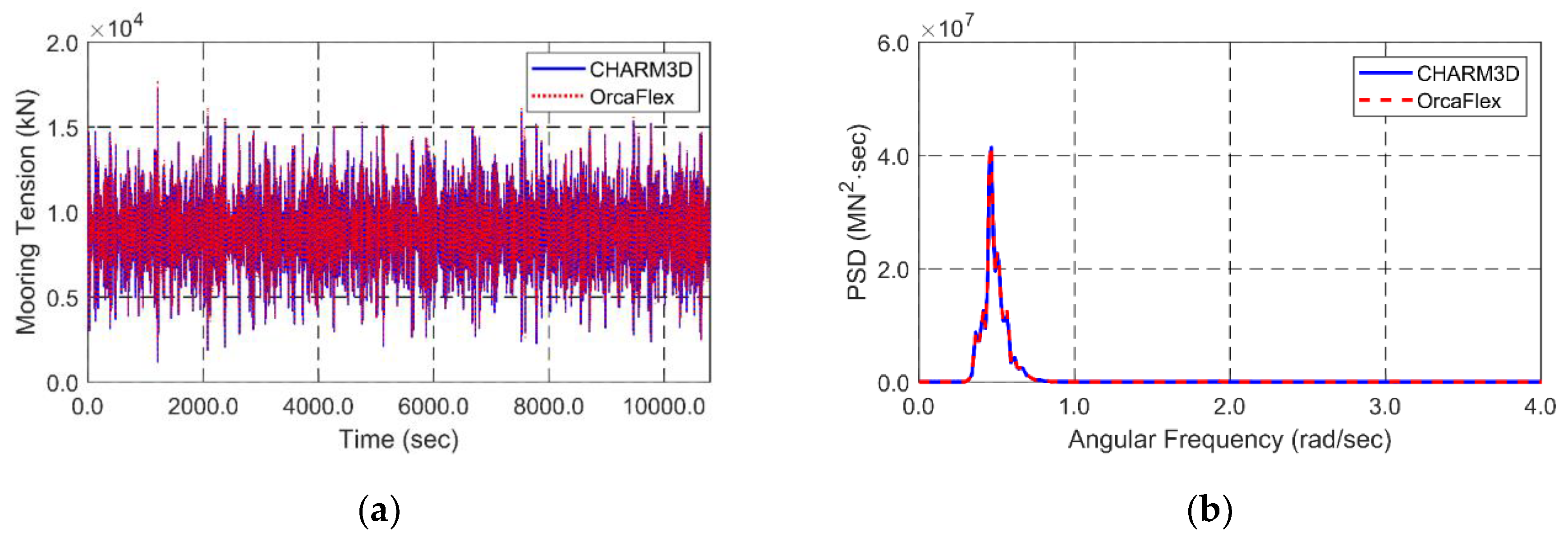
3.2. Theory of OrcaFlex
3.3. Environmental Conditions
4. Results and Discussions
4.1. Static Analysis
4.2. Dynamic Behaviors under Extreme Wave Excitations
4.3. Dynamic Behaviors under Severe Seismic Excitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ge, F.; Lu, W.; Wu, X.; Hong, Y. Fluid-structure interaction of submerged floating tunnel in wave field. Procedia Eng. 2010, 4, 263–271. [Google Scholar] [CrossRef]
- Paik, I.Y.; Oh, C.K.; Kwon, J.S.; Chang, S.P. Analysis of wave force induced dynamic response of submerged floating tunnel. KSCE J. Civ. Eng. 2004, 8, 543–550. [Google Scholar] [CrossRef]
- Long, X.; Ge, F.; Wang, L.; Hong, Y. Effects of fundamental structure parameters on dynamic responses of submerged floating tunnel under hydrodynamic loads. Acta Mech. Sin. 2009, 25, 335–344. [Google Scholar] [CrossRef]
- Di Pilato, M.; Perotti, F.; Fogazzi, P. 3D dynamic response of submerged floating tunnels under seismic and hydrodynamic excitation. Eng. Struct. 2008, 30, 268–281. [Google Scholar] [CrossRef]
- Faggiano, B.; Landolfo, R.; Mazzolani, F. The sft: An innovative Solution for waterway Strait Crossings; IABSE Symposium Report; International Association for Bridge and Structural Engineering: Lisbon, Portugal, 2005; pp. 36–42. [Google Scholar]
- Muhammad, N.; Ullah, Z.; Choi, D.-H. Performance evaluation of submerged floating tunnel subjected to hydrodynamic and seismic excitations. Applied Sci. 2017, 7, 1122. [Google Scholar] [CrossRef]
- Skorpa, L. Innovative norwegian fjord crossing. How to cross the høgsjord, alternative methods. In Proceedings of the 2nd Congress AIOM (Marine and Offshore Engineering Association), Naples, Italy, 15–17 November 1989; pp. 15–17. [Google Scholar]
- Remseth, S.; Leira, B.J.; Okstad, K.M.; Mathisen, K.M.; Haukås, T. Dynamic response and fluid/structure interaction of submerged floating tunnels. Comput. Struct. 1999, 72, 659–685. [Google Scholar] [CrossRef]
- Engebretsen, K.B.; Jakobsen, K.K.; Haugerud, S.A.; Minoretti, A. A submerged floating tube bridge concept for the bjørnafjord crossing: Marine operations. In Proceedings of the ASME 2017 36th International Conference on Ocean, Offshore and Arctic Engineering, Trondheim, Norway, 25–30 June 2017; American Society of Mechanical Engineers: New York, NY, USA, 2017; p. V07BT06A027. [Google Scholar]
- Faggiano, B.; Landolfo, R.; Mazzolani, F. Design and modelling aspects concerning the submerged floating tunnels: An application to the messina strait crossing. Krobeborg. Strait Crossing 2001, 511–519. [Google Scholar]
- Lu, W.; Ge, F.; Wang, L.; Wu, X.; Hong, Y. On the slack phenomena and snap force in tethers of submerged floating tunnels under wave conditions. Mar. Struct. 2011, 24, 358–376. [Google Scholar] [CrossRef]
- Fujii, T. Submerged floating tunnels project in funka bay design and execution. In Proceedings of the International Conference on Submerged Floating Tunnel, Sandnes, Norway, 29–30 May 1996. [Google Scholar]
- Martinelli, L.; Barbella, G.; Feriani, A. A numerical procedure for simulating the multi-support seismic response of submerged floating tunnels anchored by cables. Eng. Struct. 2011, 33, 2850–2860. [Google Scholar] [CrossRef]
- Mazzolani, F.; Landolfo, R.; Faggiano, B.; Esposto, M.; Perotti, F.; Barbella, G. Structural analyses of the submerged floating tunnel prototype in qiandao lake (pr of china). Adv. Struct. Eng. 2008, 11, 439–454. [Google Scholar] [CrossRef]
- Han, J.S.; Won, B.; Park, W.-S.; Ko, J.H. Transient response analysis by model order reduction of a mokpo-jeju submerged floating tunnel under seismic excitations. Struct. Eng. Mech. 2016, 57, 921–936. [Google Scholar] [CrossRef]
- Lee, J.; Jin, C.; Kim, M. Dynamic response analysis of submerged floating tunnels by wave and seismic excitations. Ocean Syst. Eng. Int. J. 2017, 7, 1–19. [Google Scholar] [CrossRef]
- Ghimire, A.; Prakash, O. Intangible study for the design and construction of submerged floating tunnel. Imp. J. Interdiscip. Res. 2017, 3, 721–724. [Google Scholar]
- Kunisu, H.; Mizuno, S.; Mizuno, Y.; Saeki, H. Study on submerged floating tunnel characteristics under the wave condition. In Proceedings of the The Fourth International Offshore and Polar Engineering Conference, Osaka, Japan, 10–15 April 1994; International Society of Offshore and Polar Engineers: Osaka, Japan, 1994; pp. 27–32. [Google Scholar]
- Hong, Y.; Ge, F.; Lu, W. On the two essential concepts for sft: Synergetic buoyancy-weight ratio and slack-taut map. Procedia Eng. 2016, 166, 221–228. [Google Scholar] [CrossRef]
- Long, X.; Ge, F.; Hong, Y. Feasibility study on buoyancy–weight ratios of a submerged floating tunnel prototype subjected to hydrodynamic loads. Acta Mech. Sin. 2015, 31, 750–761. [Google Scholar] [CrossRef] [Green Version]
- Seo, S.-I.; Mun, H.-S.; Lee, J.-H.; Kim, J.-H. Simplified analysis for estimation of the behavior of a submerged floating tunnel in waves and experimental verification. Mar. Struct. 2015, 44, 142–158. [Google Scholar] [CrossRef]
- Chen, Z.; Xiang, Y.; Lin, H.; Yang, Y. Coupled vibration analysis of submerged floating tunnel system in wave and current. Appl. Sci. 2018, 8, 1311. [Google Scholar] [CrossRef]
- Xiao, J.; Huang, G. Transverse earthquake response and design analysis of submerged floating tunnels with various shore connections. Procedia Eng. 2010, 4, 233–242. [Google Scholar] [CrossRef]
- Martinelli, L.; Domaneschi, M.; Shi, C. Submerged floating tunnels under seismic motion: Vibration mitigation and seaquake effects. Procedia Eng. 2016, 166, 229–246. [Google Scholar] [CrossRef]
- Wu, Z.; Ni, P.; Mei, G. Vibration response of cable for submerged floating tunnel under simultaneous hydrodynamic force and earthquake excitations. Adv. Struct. Eng. 2018, 21, 1761–1773. [Google Scholar] [CrossRef]
- Mirzapour, J.; Shahmardani, M.; Tariverdilo, S. Seismic response of submerged floating tunnel under support excitation. Ships Offshore Struct. 2017, 12, 404–411. [Google Scholar] [CrossRef]
- Cifuentes, C.; Kim, S.; Kim, M.; Park, W. Numerical simulation of the coupled dynamic response of a submerged floating tunnel with mooring lines in regular waves. Ocean Syst. Eng. 2015, 5, 109–123. [Google Scholar] [CrossRef]
- Jin, C.; Kim, M. Dynamic and structural responses of a submerged floating tunnel under extreme wave conditions. Ocean Syst. Eng. Int. J. 2017, 7, 413–433. [Google Scholar]
- Jin, C.; Lee, J.; Kim, H.; Kim, M. Dynamic responses of a submerged floating tunnel in survival wave and seismic excitations. In Proceedings of the The 27th International Ocean and Polar Engineering Conference, San Francisco, CA, USA, 25–30 June 2017; International Society of Offshore and Polar Engineers: San Francisco, CA, USA, 2017; pp. 547–551. [Google Scholar]
- Lee, J.H.; Seo, S.I.; Mun, H.S. Seismic behaviors of a floating submerged tunnel with a rectangular cross-section. Ocean Eng. 2016, 127, 32–47. [Google Scholar] [CrossRef]
- Thompson, N. Mean forces, pressure and flow field velocities for circular cylindrical structures: Single cylinder with two-dimensional flow. EDU Data Item 1980, 80025. [Google Scholar]
- Veritas, D.N. Offshore Standard dnv-os-e301: Offshore Standard-Position Mooring; Det Norske Veritas (DNV) Oslo: Oslo, Norway, 2010. [Google Scholar]
- Veritas, D.N. Offshore Standard dnv-os-e302: Offshore Mooring Chain; Det Norske Veritas (DNV) Oslo: Oslo, Norway, 2009. [Google Scholar]
- Kim, M.; Koo, B.; Mercier, R.; Ward, E. Vessel/mooring/riser coupled dynamic analysis of a turret-moored fpso compared with otrc experiment. Ocean Eng. 2005, 32, 1780–1802. [Google Scholar] [CrossRef]
- Koo, B.; Kim, M. Hydrodynamic interactions and relative motions of two floating platforms with mooring lines in side-by-side offloading operation. Appl. Ocean Res. 2005, 27, 292–310. [Google Scholar] [CrossRef]
- Bae, Y.; Kim, M. Coupled dynamic analysis of multiple wind turbines on a large single floater. Ocean Eng. 2014, 92, 175–187. [Google Scholar] [CrossRef]
- Kim, S.; Kim, M.; Kang, H. Turret location impact on global performance of a thruster-assisted turret-moored fpso. Ocean Syst. Eng. Int. J. 2016, 6, 265–287. [Google Scholar] [CrossRef]
- Jang, H.; Kang, H.; Kim, M. Numerical simulation of dynamic interactions of an arctic spar with drifting level ice. Ocean Syst. Eng. Int. J. 2016, 6, 345–362. [Google Scholar] [CrossRef]
- Garrett, D. Dynamic analysis of slender rods. J. Energy Resour. Technol. 1982, 104, 302–306. [Google Scholar] [CrossRef]
- Faltinsen, O. Sea Loads on Ships and Offshore Structures; Cambridge University Press: London, UK, 1993. [Google Scholar]
- Islam, N.; Ahrnad, S. Nonlinear seismic response of articulated offshore tower. Def. Sci. J. 2003, 53, 105–113. [Google Scholar] [CrossRef]
- Mousavi, S.A.; Bargi, K.; Zahrai, S.M. Optimum parameters of tuned liquid column–gas damper for mitigation of seismic-induced vibrations of offshore jacket platforms. Struct. Control Health Monit. 2013, 20, 422–444. [Google Scholar] [CrossRef]
- Ran, Z.; Kim, M.; Zheng, W. Coupled dynamic analysis of a moored spar in random waves and currents (time-domain versus frequency-domain analysis). J. Offshore Mech. Arct. Eng. 1999, 121, 194–200. [Google Scholar] [CrossRef]
- Orcina. Orcaflex Manual. Available online: https://www.orcina.com/SoftwareProducts/OrcaFlex/index.php (accessed on 17 October 2018).
- Suh, K.-D.; Kwon, H.-D.; Lee, D.-Y. Some statistical characteristics of large deepwater waves around the korean peninsula. Coast. Eng. 2010, 57, 375–384. [Google Scholar] [CrossRef]
- USGS. National Strong-Motion Project Earthquake Data Sets. Available online: https://escweb.wr.usgs.gov/nsmp-data/nsmn_eqdata.html (accessed on 27 August 2018).
- API. Recommended Practice for Design and Analysis of Stationkeeping Systems for Floating Structures: Exploration and Production Department. Api Recommended Practice 2sk (rp 2sk): Effective Date: March 1, 1997; American Petroleum Institute: Washington, DC, USA, 1996. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value | Unit |
|---|---|---|---|
| Tunnel | Length | 700 | m |
| Outer diameter | 23 | m | |
| End boundary condition | Fixed-fixed condition | - | |
| Material | High-density concrete | - | |
| Young’s modulus | 30 | GPa | |
| Bending stiffness (EI) | 2.34 × 1011 | kN·m2 | |
| Axial stiffness (EA) | 4.27 × 109 | kN | |
| Buoyancy-weight ratio (BWR) | 1.3 | - | |
| Added mass coefficient | 1.0 | - | |
| Drag coefficient | 0.55 [31] | - | |
| Mooring lines (Chain, Stud-less type) | Length | 51.1 (Line # 1 and 2), 37.8 (Line # 3 and 4) | m |
| Mass/unit length | 644.7 | kg/m | |
| Nominal diameter () for wave drag force calculation | 0.18 | m | |
| Equivalent outer diameter () for wave inertia force calculation | 0.324 () | m | |
| Bending stiffness () | 0 | kN·m2 | |
| Axial stiffness () | 2.77 × 106 | kN | |
| Added mass coefficient | 1.0 | ||
| Drag coefficient | 2.4 [32] | ||
| Minimum breaking load (MBL) | 30,689 (Grade R5) [33] | kN |
| Component | Wet Natural Frequency (rad/s) | Mode Number |
|---|---|---|
| Tunnel (Horizontal direction) | 1.92 | 1st mode |
| 2.70 | 2nd mode | |
| 4.53 | 3rd mode | |
| Tunnel (Vertical direction) | 3.12 | 1st mode |
| 3.45 | 2nd mode | |
| 4.89 | 3rd mode | |
| Mooring lines #1 and #2 (Center) | 5.78 | 1st mode |
| Mooring lines #3 and #4 (Center) | 9.04 | 1st mode |
| Parameter | Maximum | Minimum | Standard Deviation | Unit |
|---|---|---|---|---|
| Horizontal displacement | 0.243 | −0.261 | 0.059 | m |
| Vertical displacement | 0.058 | −0.066 | 0.014 | |
| Mooring tension (line #1) | 14,765.75 | 885.56 | 1917.55 | kN |
| Mooring tension (line #2) | 15,276.12 | 902.94 | 1919.01 | |
| Mooring tension (line #3) | 17,334.93 | 1206.64 | 2015.53 | |
| Mooring tension (line #4) | 16,542.11 | 953.24 | 2014.32 |
| Parameter | Numerical Model | Maximum | Minimum | Standard Deviation | Unit |
|---|---|---|---|---|---|
| Horizontal displacement | Eq | 0.070 | −0.073 | 0.023 | m |
| Eq + Sq | 0.070 | −0.072 | 0.023 | ||
| Vertical displacement | Eq | 0.039 | −0.042 | 0.013 | |
| Eq + Sq | 0.019 | −0.019 | 0.006 | ||
| Mooring tension (line #1) | Eq | 9872.22 | 3783.56 | 801.58 | kN |
| Eq + Sq | 8728.01 | 4631.84 | 649.80 | ||
| Mooring tension (line #2) | Eq | 9722.09 | 3291.79 | 829.07 | |
| Eq + Sq | 8778.38 | 4491.79 | 649.33 | ||
| Mooring tension (line #3) | Eq | 12,295.18 | 4918.66 | 958.46 | |
| Eq + Sq | 11,009.40 | 6691.91 | 649.58 | ||
| Mooring tension (line #4) | Eq | 12,512.53 | 5633.35 | 925.67 | |
| Eq + Sq | 11,001.66 | 6772.99 | 652.55 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, C.; Kim, M.-H. Time-Domain Hydro-Elastic Analysis of a SFT (Submerged Floating Tunnel) with Mooring Lines under Extreme Wave and Seismic Excitations. Appl. Sci. 2018, 8, 2386. https://doi.org/10.3390/app8122386
Jin C, Kim M-H. Time-Domain Hydro-Elastic Analysis of a SFT (Submerged Floating Tunnel) with Mooring Lines under Extreme Wave and Seismic Excitations. Applied Sciences. 2018; 8(12):2386. https://doi.org/10.3390/app8122386
Chicago/Turabian StyleJin, Chungkuk, and Moo-Hyun Kim. 2018. "Time-Domain Hydro-Elastic Analysis of a SFT (Submerged Floating Tunnel) with Mooring Lines under Extreme Wave and Seismic Excitations" Applied Sciences 8, no. 12: 2386. https://doi.org/10.3390/app8122386
APA StyleJin, C., & Kim, M.-H. (2018). Time-Domain Hydro-Elastic Analysis of a SFT (Submerged Floating Tunnel) with Mooring Lines under Extreme Wave and Seismic Excitations. Applied Sciences, 8(12), 2386. https://doi.org/10.3390/app8122386