A High Precision Capacitive Linear Displacement Sensor with Time-Grating that Provides Absolute Positioning Capability Based on a Vernier-Type Structure

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Structure and Measurement Principle
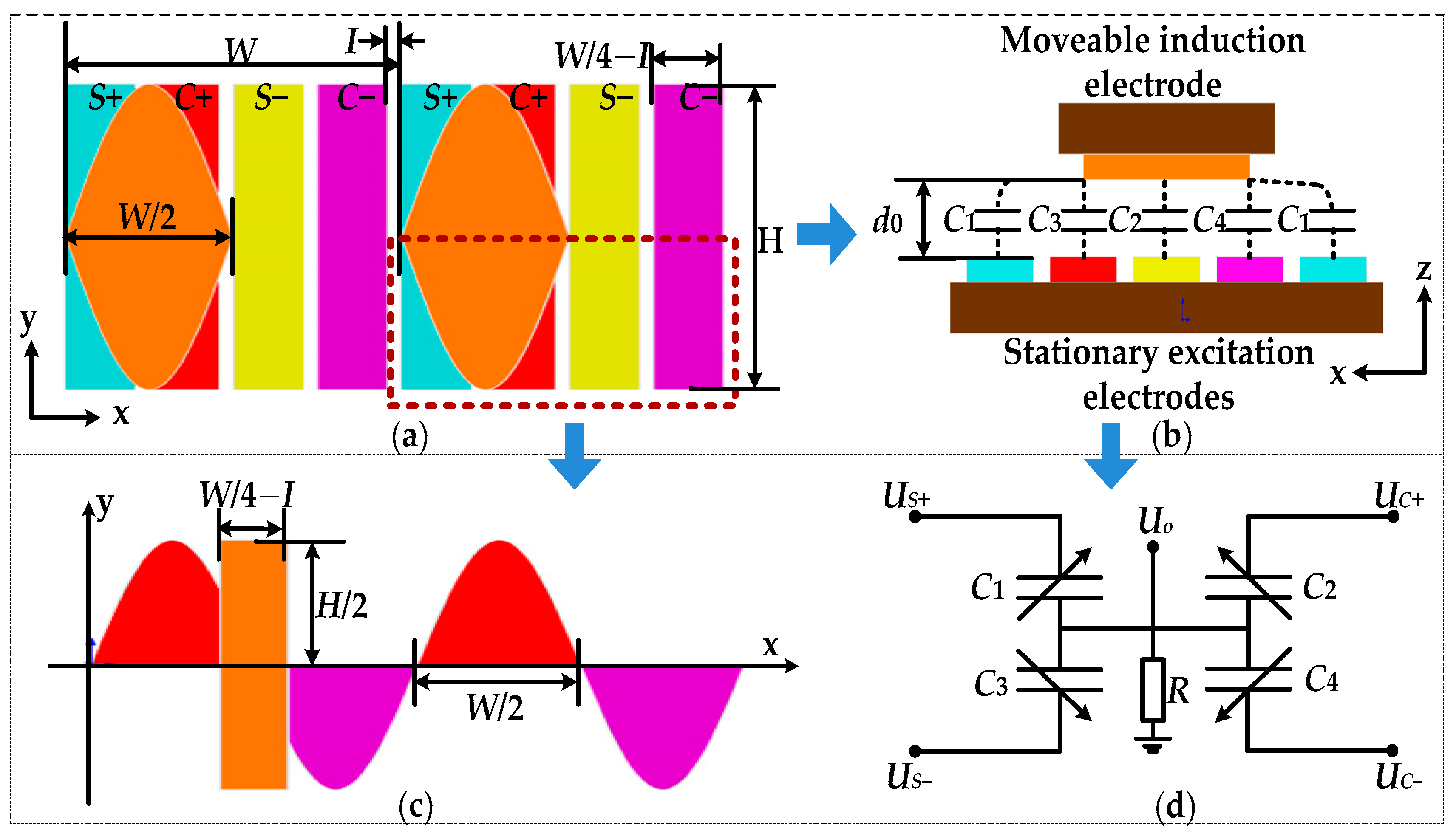
2.1. Single-Row Sensor Measurement Principle
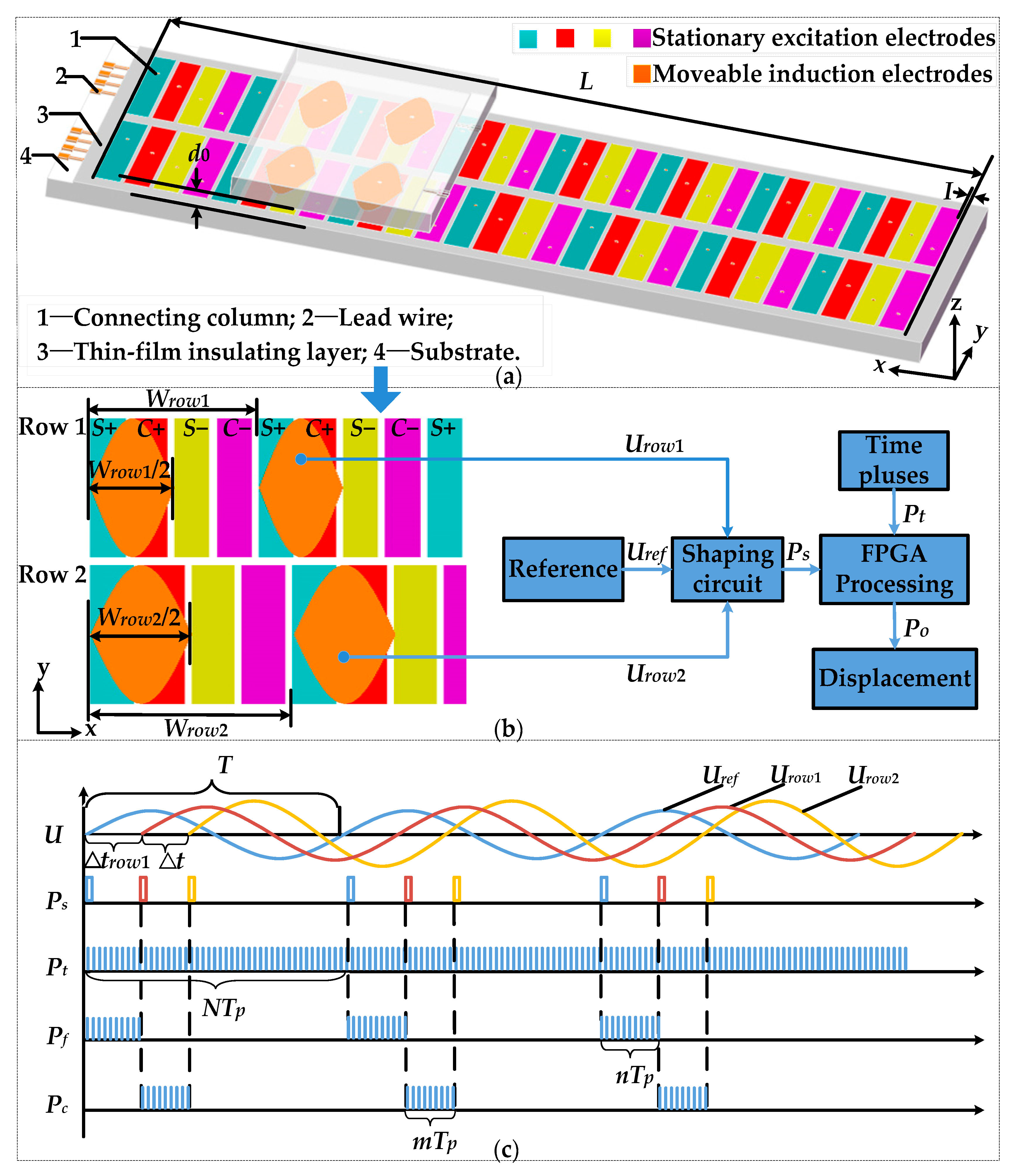
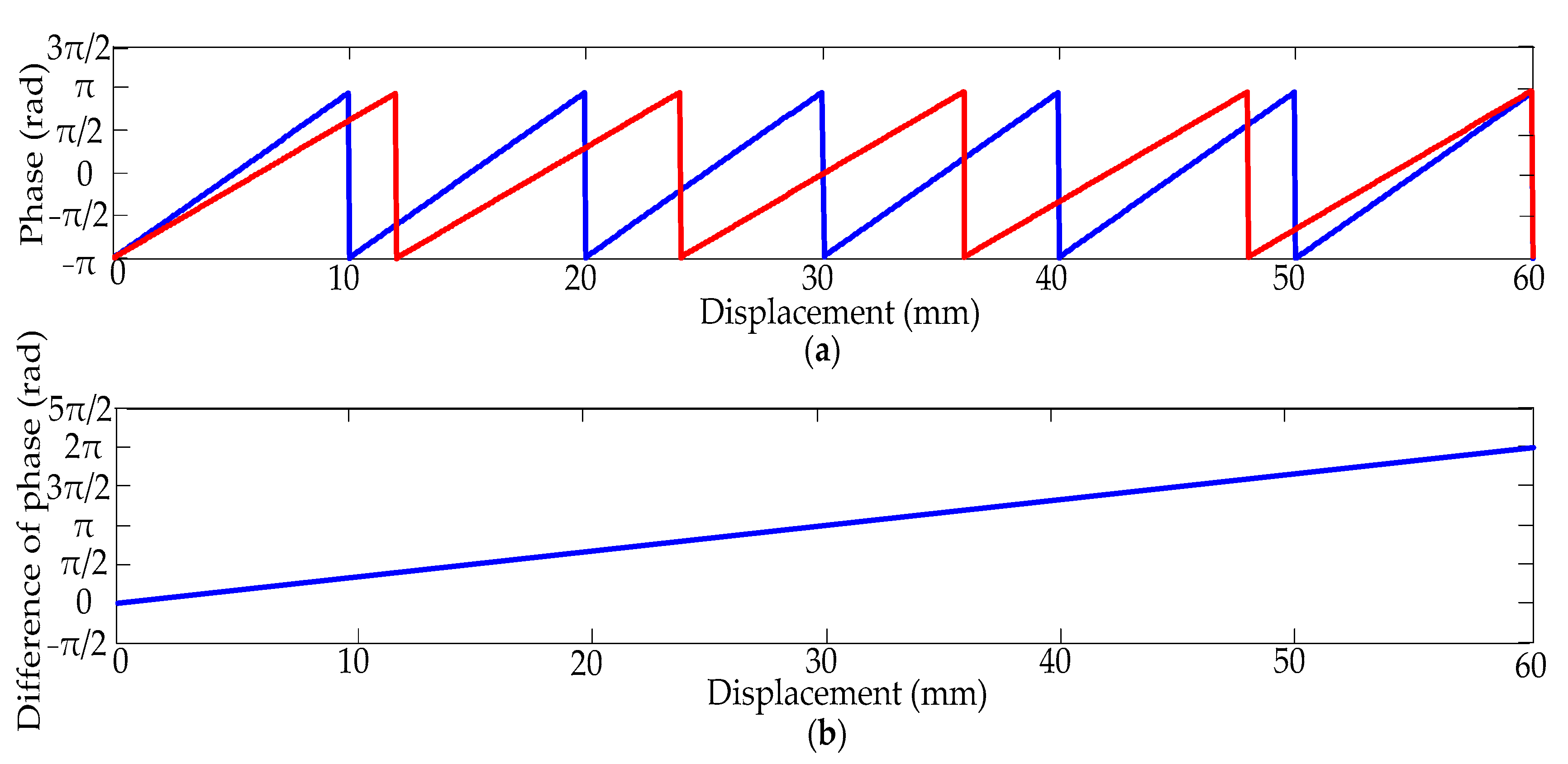
2.2. Absolute Measurement Principle
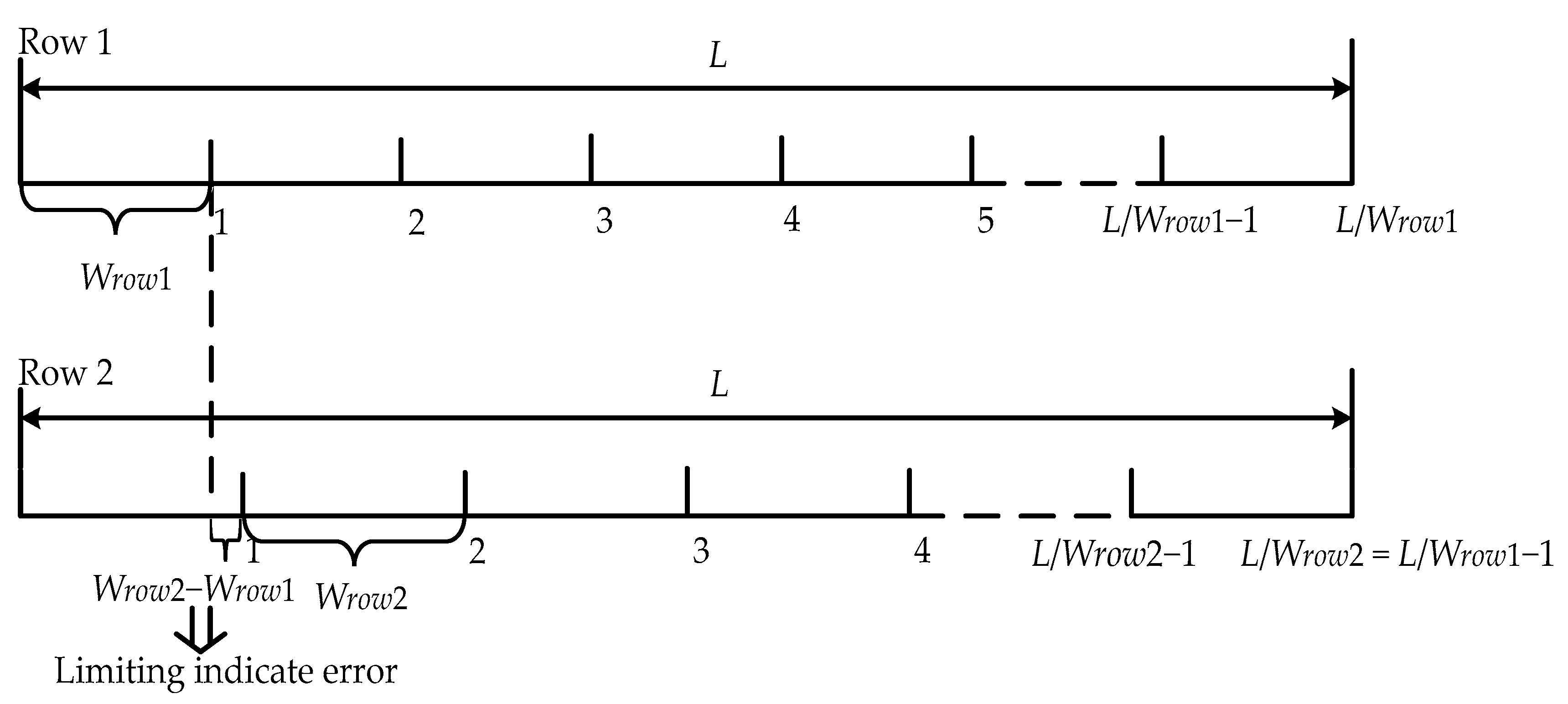
3. Analysis of the Limit of Error
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kai, T.; Akiyama, M.; Nakamura, Y.; Wakui, S. Effects of Back Electromotive Force in an Absolute Displacement Sensor and Improvement Using Current-feedback-type Driver. In Proceeding of the 2011 International Conference on Advanced Mechatronic Systems; IEEE: Zhengzhou, China, August 2011; p. 78. [Google Scholar]
- Bai, Y.; Lu, Y.; Hu, P.; Wang, G.; Xu, J.; Zeng, T.; Li, Z.; Zhang, Z.; Tan, J. Absolute Position Sensing Based on a Robust Differential Capacitive Sensor with a Grounded Shield Window. Sensors 2016, 16, 680. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Peng, K.; Chen, Z.; Pu, H.; Yu, Z. A New Capacitive Displacement Sensor with Nanometer Accuracy and Long Range. IEEE Sens. J. 2016, 16, 2306–2316. [Google Scholar]
- Fleming, A.J. A Review of Nanometer Resolution Position Sensors: Operation and performance. Sens. Actuators A Phys. 2013, 190, 106–126. [Google Scholar] [CrossRef]
- Lin, C.Y.; Lee, C.H. Remote Servo Tuning System for Multi-Axis CNC Machine Tools Using a Virtual Machine Tool Approach. Appl. Sci. 2017, 7, 776. [Google Scholar] [CrossRef]
- Li, K.; Zhang, Y.; Wei, S.; Yue, H. Evolutionary Algorithm-Based Friction Feedforward Compensation for a Pneumatic Rotary Actuator Servo System. Appl. Sci. 2018, 8, 1623. [Google Scholar] [CrossRef]
- Bahn, W.; Nam, J.H.; Lee, S.H.; Cho, D.I.D. Digital Optoelectrical Pulse Method for Vernier-Type Rotary Encoders. IEEE Trans. Instrum. Meas. 2016, 65, 431–440. [Google Scholar] [CrossRef]
- Zhang, Z.; Ni, F.; Dong, Y.; Guo, C.; Jin, M.; Liu, H. A Novel Absolute Magnetic Rotary Sensor. IEEE Trans. Ind. Electron. 2015, 62, 4408–4419. [Google Scholar] [CrossRef]
- Cai, N.; Xie, W.; Peng, H.; Wang, H.; Yang, Z.; Chen, X. A Novel Error Compensation Method for an Absolute Optical Encoder Based on Empirical Mode Decomposition. Mech. Syst. Signal Process. 2017, 88, 81–88. [Google Scholar] [CrossRef]
- Girao, P.M.B.S.; Postolache, O.A.; Faria, J.A.B.; Pereira, J.M.C.D. An Overview and a Contribution to the Optical Measurement of Linear Displacement. IEEE Sens. J. 2001, 1, 322–331. [Google Scholar] [CrossRef]
- Fleming, W.J. Overview of Automotive Sensors. IEEE Sens. J. 2002, 1, 296–308. [Google Scholar] [CrossRef]
- Xiaokang, L.; Hongji, P.; Fangyan, Z.; Jiqin, F.; Zhicheng, Y. Research on electric field distribution and error characteristics of the nanometer time grating displacement sensor. Chin. J. Sci. Instrum 2013, 34, 2257–2264. [Google Scholar]
- Friedland, I.; Gurwich, I.; Brandes, A. absolute optical sensors, positioners, optical linear sensor, linear displacement, sensor volt-displacement characteristic, absolute position sensor, sensor scale factor. Sens. Transducers J. 2009, 100, 125–136. [Google Scholar]
- Gage, S.; Evans, D.; Hodapp, M.; Sorensen, H.; Jamison, D.; Krause, B. Optoelectronics/Fiber-Optics Applications Manual, 2nd ed.; McGraw-Hill Book Co.: New York, UY, USA, 1981. [Google Scholar]
- Hao, S.H.; Liu, J.Z.; Liu, Y.; Hao, M.H.; Song, B.Y. Design of a New Kind of Absolute Magnetic Grid Displacement Sensor. High Volt. Eng. 2009, 35, 2120–2125. [Google Scholar]
- Jiang, K.D. Magnetic flux responsive gate with numerical control system. Machinery 2012, 50, 39–40. [Google Scholar]
- Hao, S.H.; Liu, Y.; Song, B.Y.; Hao, M.H. A Novel Absolute Displacement Detecting Magnetic Sensor. J. Harbin Inst. Technol. 2011, 18, 81–85. [Google Scholar]
- Smith, P.T.; Vallance, R.R.; Marsh, E.R. Correcting Capacitive Displacement Measurements in Metrology Applications with Cylindrical Artifacts. Precis. Eng. 2005, 29, 324–335. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, L.; Shen, M. Novel Capacitive Displacement Sensor Based on Interlocking Stator Electrodes with Sequential Commutating Excitation. Sens. Actuators A Phys. 2015, 230, 94–101. [Google Scholar] [CrossRef]
- Ahn, H.J.; Park, J.H.; Um, C.Y.; Han, D.C. A Disk-type Capacitive Sensor for Five-dimensional Motion Measurements. Meas. Sci. Technol. 2008, 19, 045202. [Google Scholar] [CrossRef]
- Chen, Z.; Pu, H.; Liu, X.; Peng, D.; Yu, Z. A Time-Grating Sensor for Displacement Measurement with Long Range and Nanometer Accuracy. IEEE Trans. Instrum. Meas. 2015, 64, 3105–3115. [Google Scholar] [CrossRef]
- Yu, Z.; Peng, K.; Liu, X.; Pu, H.; Chen, Z. A New Capacitive Long-range Displacement Nanometer Sensor with Differential Sensing Structure Based on Time-Grating. Meas. Sci. Technol. 2018, 29, 054009. [Google Scholar] [CrossRef]
- Peng, K.; Yu, Z.; Liu, X.; Chen, Z.; Pu, H. Features of Capacitive Displacement Sensing that Provide High-accuracy Measurements with Reduced Manufacturing Precision. IEEE Trans. Ind. Electron. 2017, 64, 7377–7386. [Google Scholar] [CrossRef]
- Pu, H.; Liu, H.; Liu, X.; Peng, K.; Yu, Z. A Novel Capacitive Absolute Positioning Sensor Based on Time Grating with Nanometer Resolution. Mech. Syst. Signal Process. 2018, 104, 705–715. [Google Scholar] [CrossRef]
- Peng, K.; Liu, X.; Chen, Z.; Yu, Z.; Pu, H. Sensing Mechanism and Error Analysis of a Capacitive Long-range Displacement Nanometer Sensor Based on Time Grating. IEEE Sens. J. 2017, 17, 1596–1607. [Google Scholar] [CrossRef]








© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Zhang, H.; Peng, K.; Tang, Q.; Chen, Z. A High Precision Capacitive Linear Displacement Sensor with Time-Grating that Provides Absolute Positioning Capability Based on a Vernier-Type Structure. Appl. Sci. 2018, 8, 2419. https://doi.org/10.3390/app8122419
Liu X, Zhang H, Peng K, Tang Q, Chen Z. A High Precision Capacitive Linear Displacement Sensor with Time-Grating that Provides Absolute Positioning Capability Based on a Vernier-Type Structure. Applied Sciences. 2018; 8(12):2419. https://doi.org/10.3390/app8122419
Chicago/Turabian StyleLiu, Xiaokang, Hui Zhang, Kai Peng, Qifu Tang, and Ziran Chen. 2018. "A High Precision Capacitive Linear Displacement Sensor with Time-Grating that Provides Absolute Positioning Capability Based on a Vernier-Type Structure" Applied Sciences 8, no. 12: 2419. https://doi.org/10.3390/app8122419
APA StyleLiu, X., Zhang, H., Peng, K., Tang, Q., & Chen, Z. (2018). A High Precision Capacitive Linear Displacement Sensor with Time-Grating that Provides Absolute Positioning Capability Based on a Vernier-Type Structure. Applied Sciences, 8(12), 2419. https://doi.org/10.3390/app8122419