Numerical Investigation into Effects of Viscous Flux Vectors on Hydrofoil Cavitation Flow and Its Radiated Flow Noise


Abstract
:1. Introduction
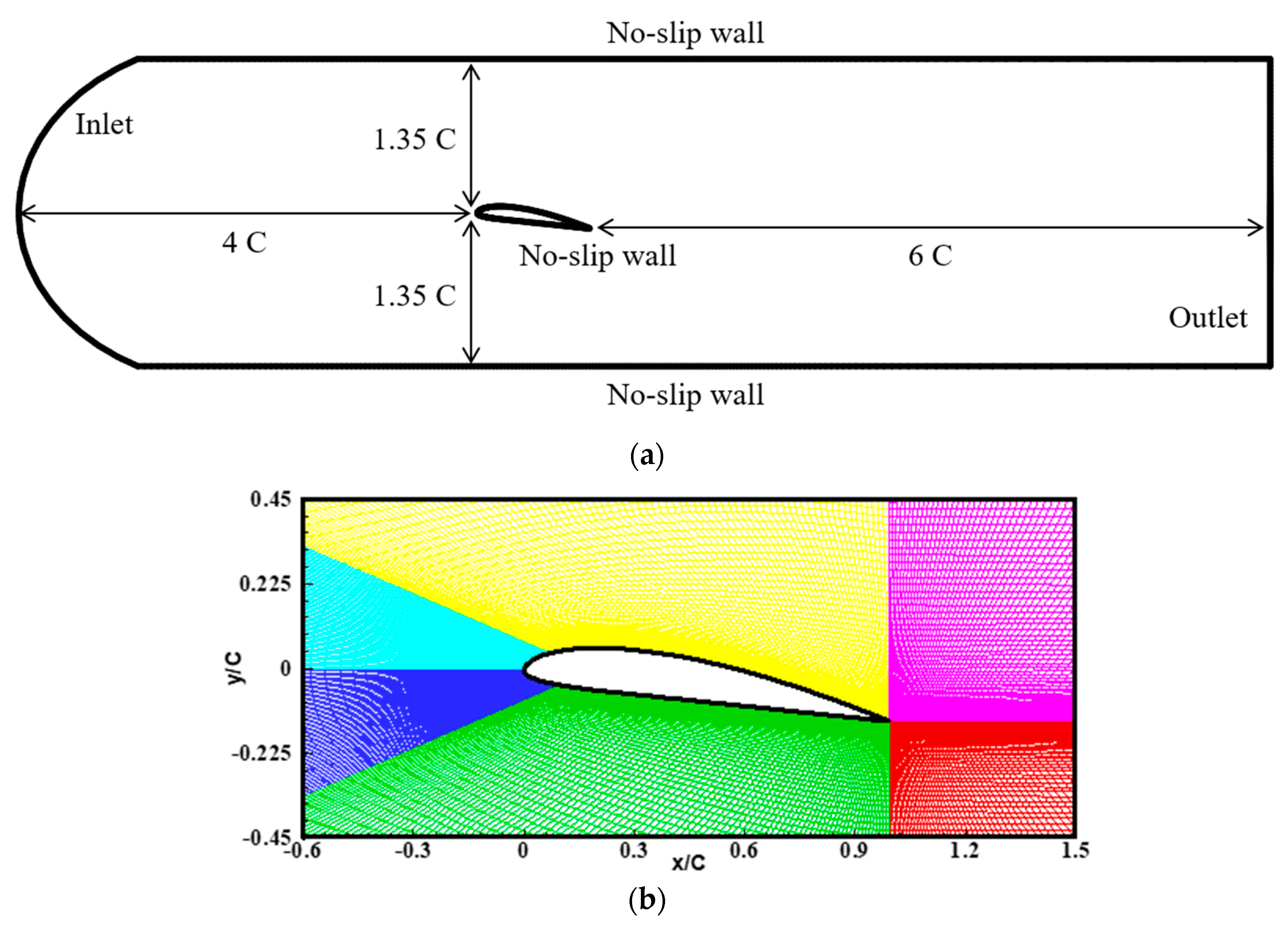
2. Target Problem Description
3. Governing Equations and Numerical Implementations
3.1. Governing Equations
3.2. Turbulence Modeling
3.3. Numerical Implementations
3.4. Viscous Flux Treatements
3.4.1. Viscous Lagging Approach
3.4.2. Full Viscous Approach
3.4.3. Thin-Layer Approximation
3.5. Acoustic Analogy for Cavitation Noise Prediction
4. Results and Discussion
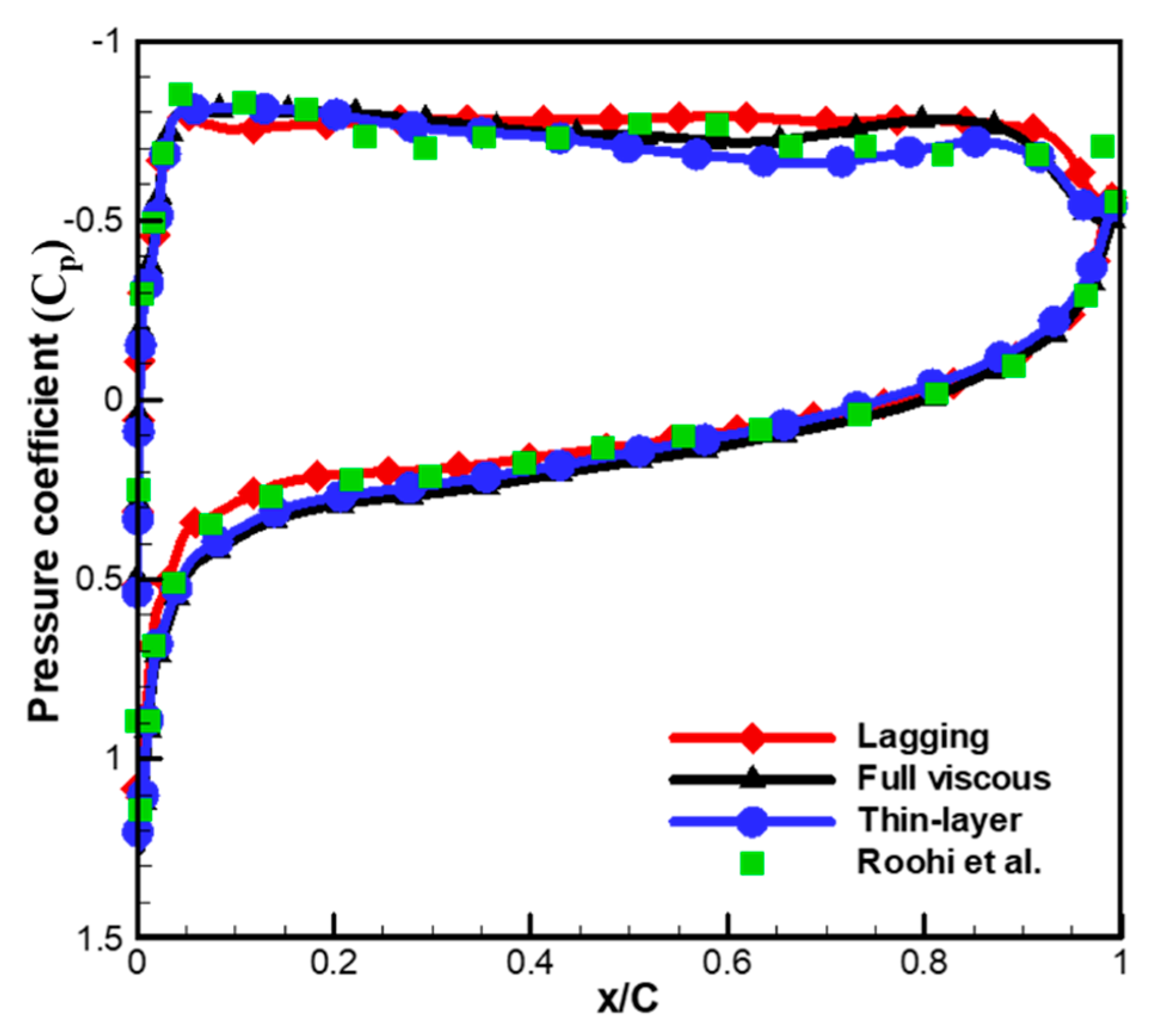
4.1. Verification Tests
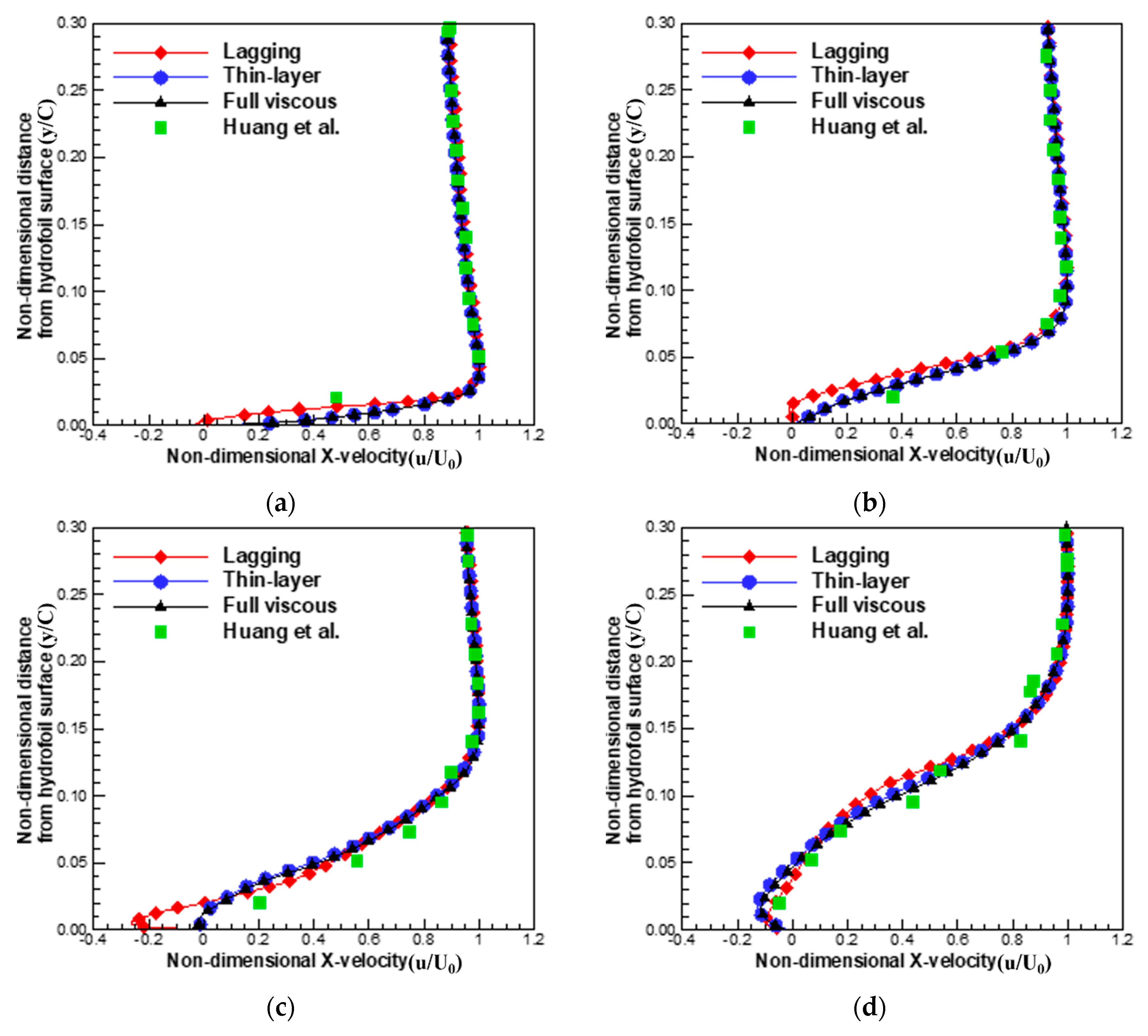
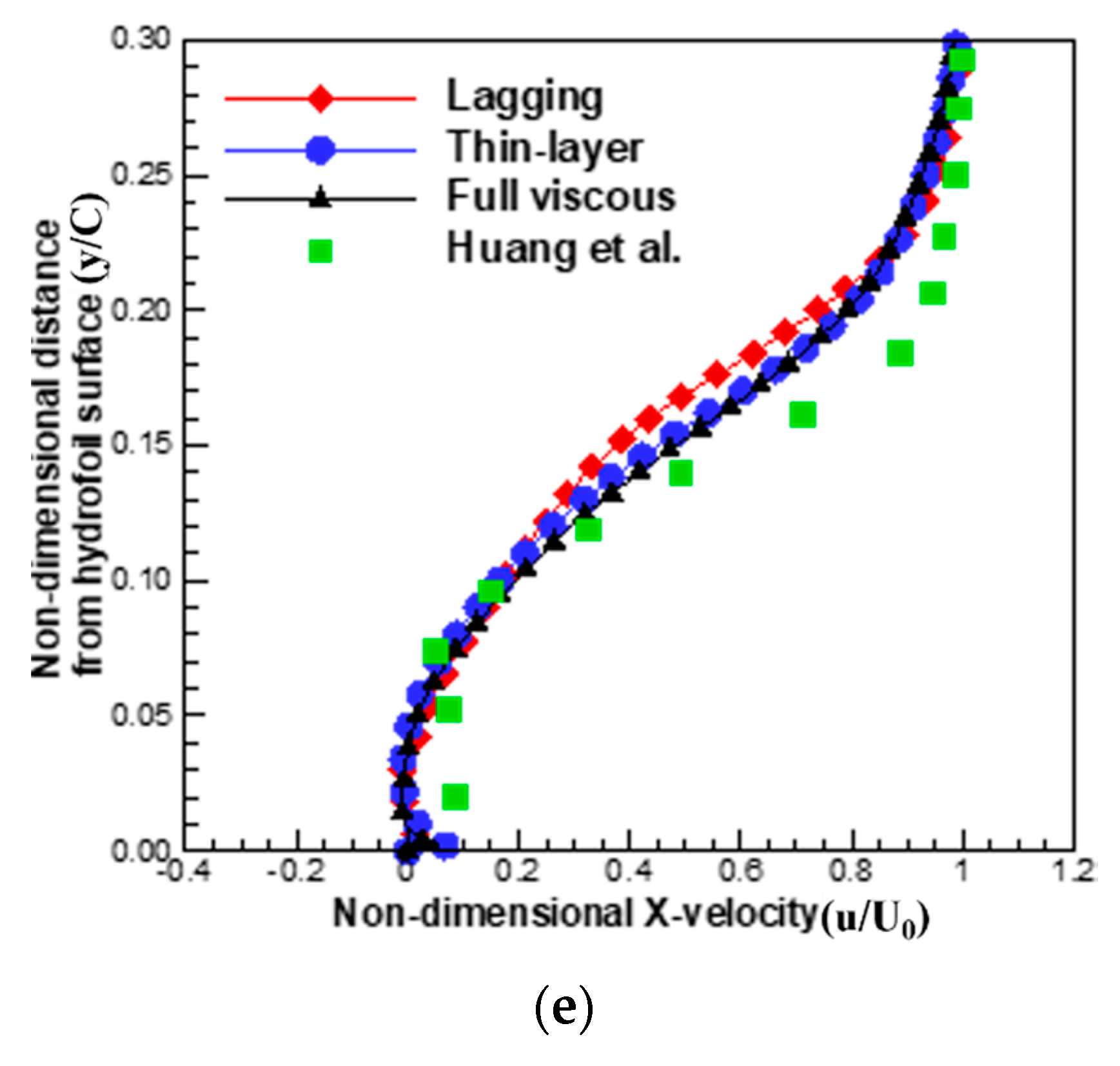
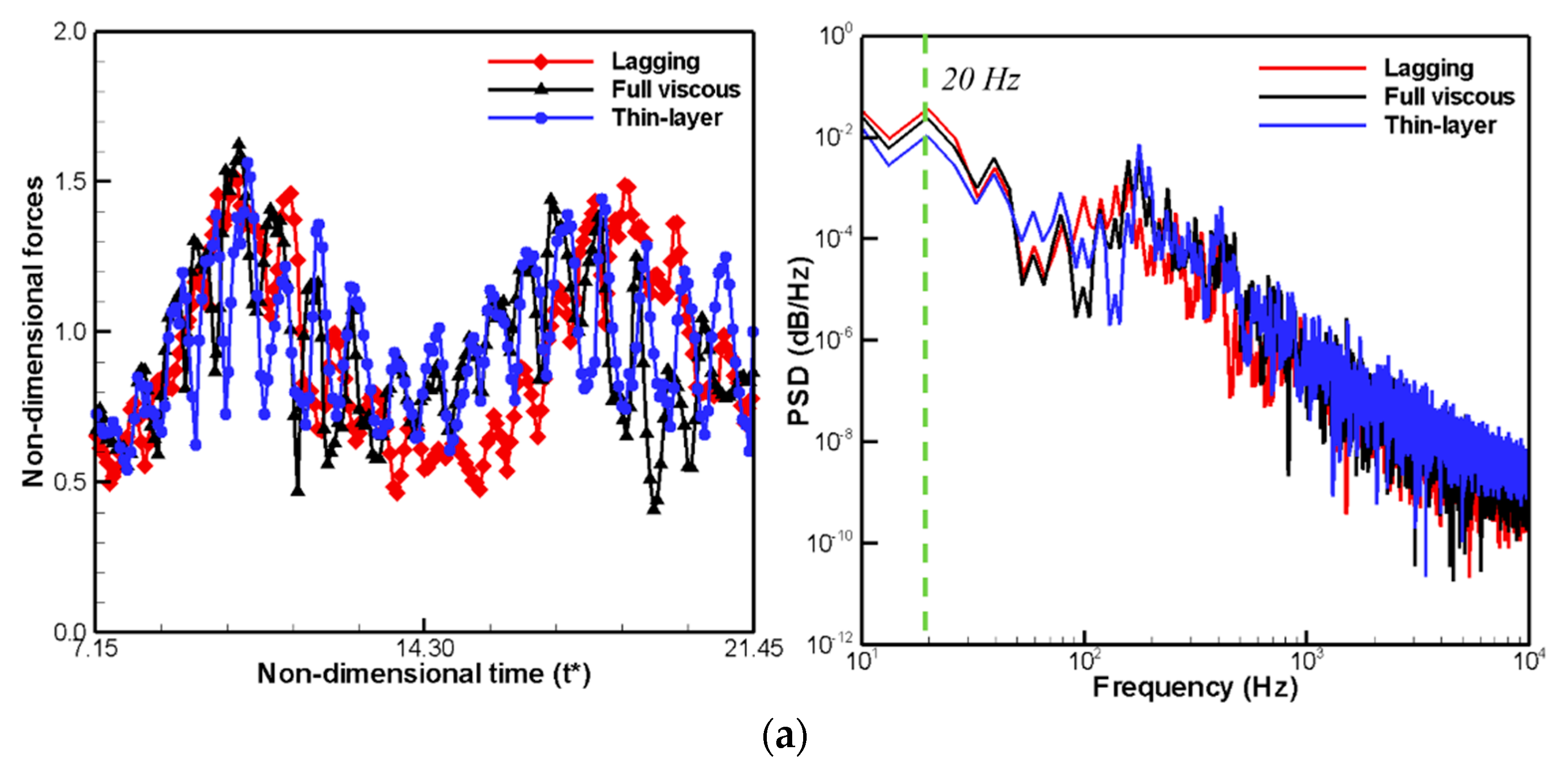
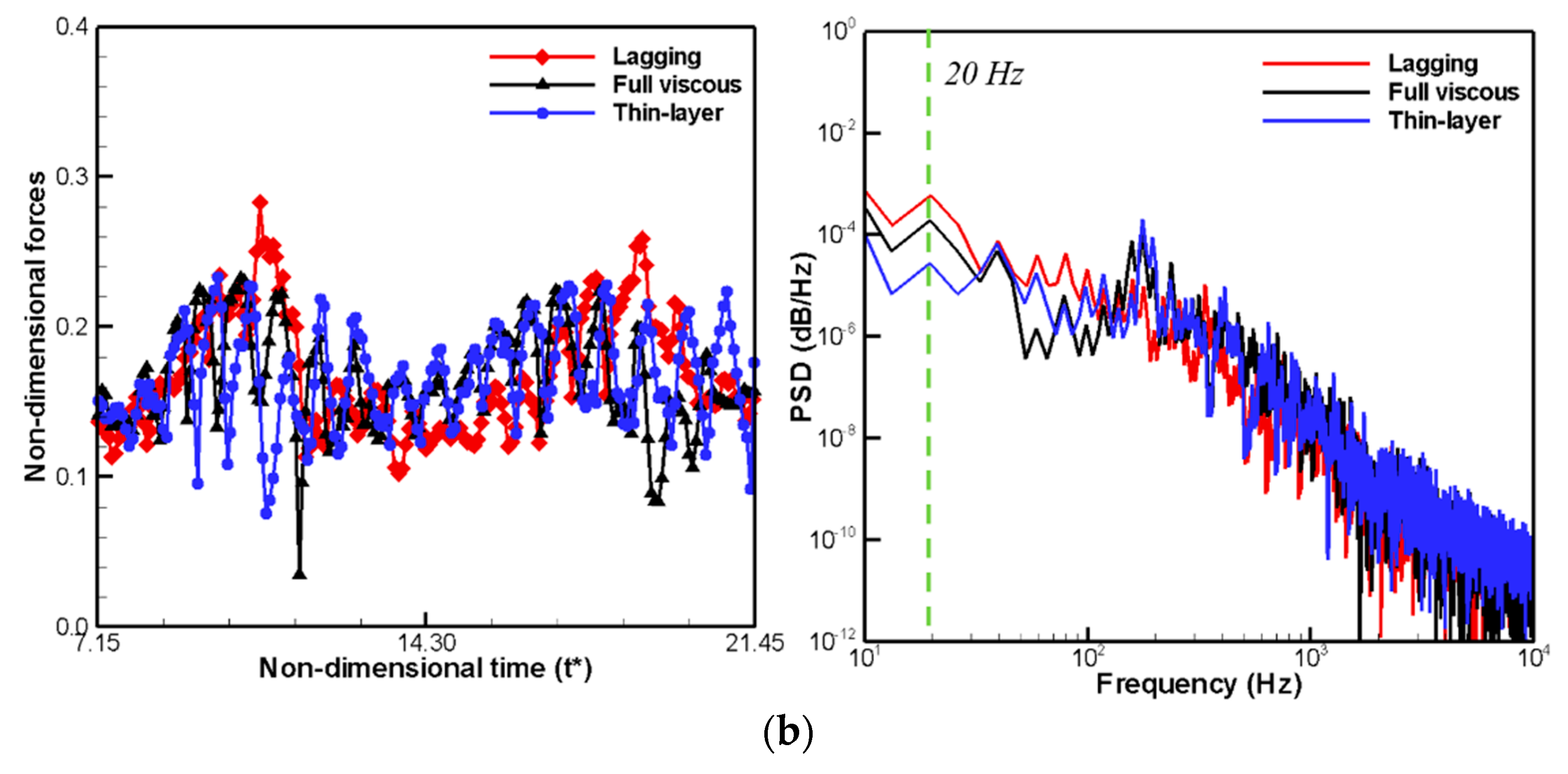
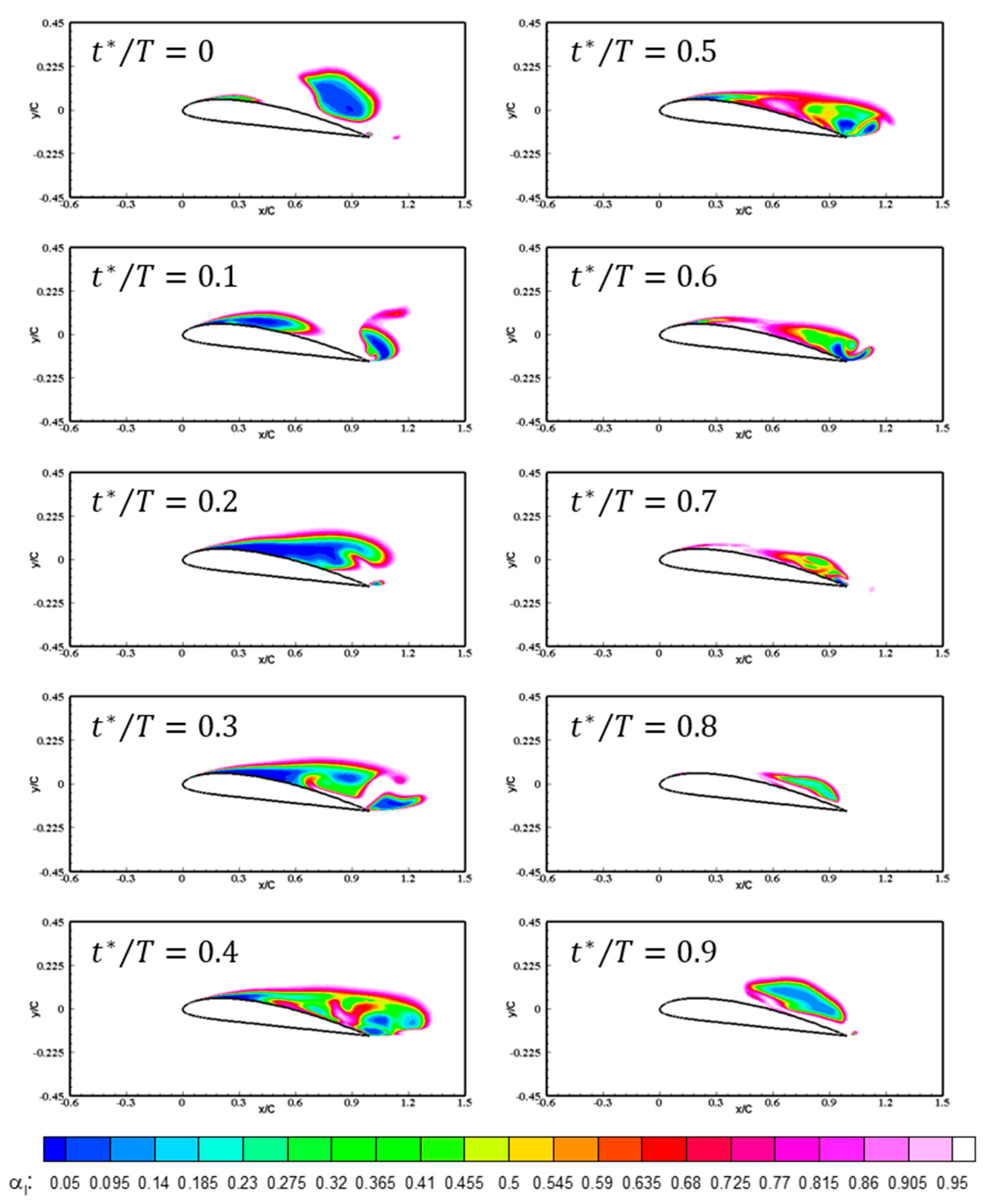
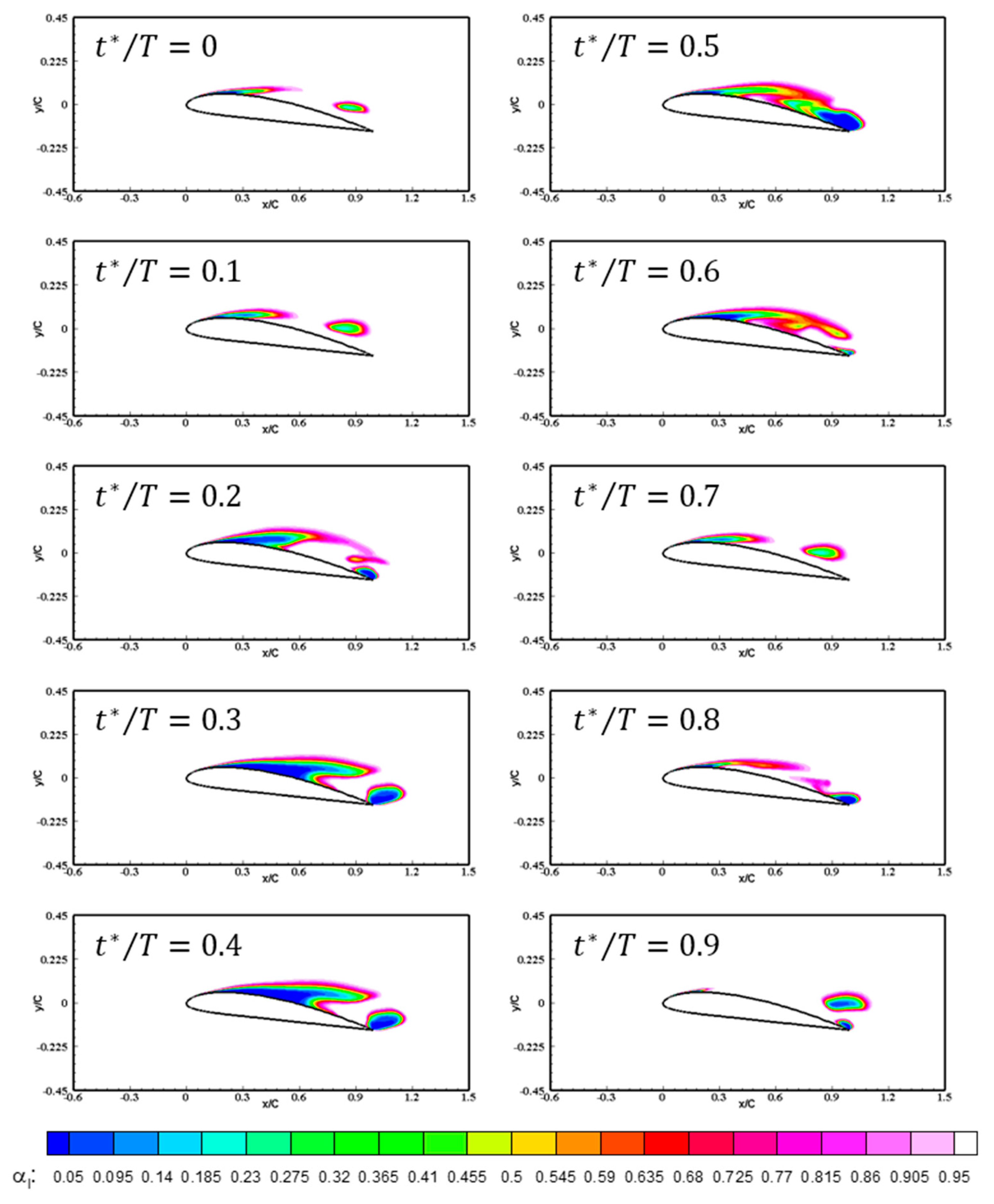
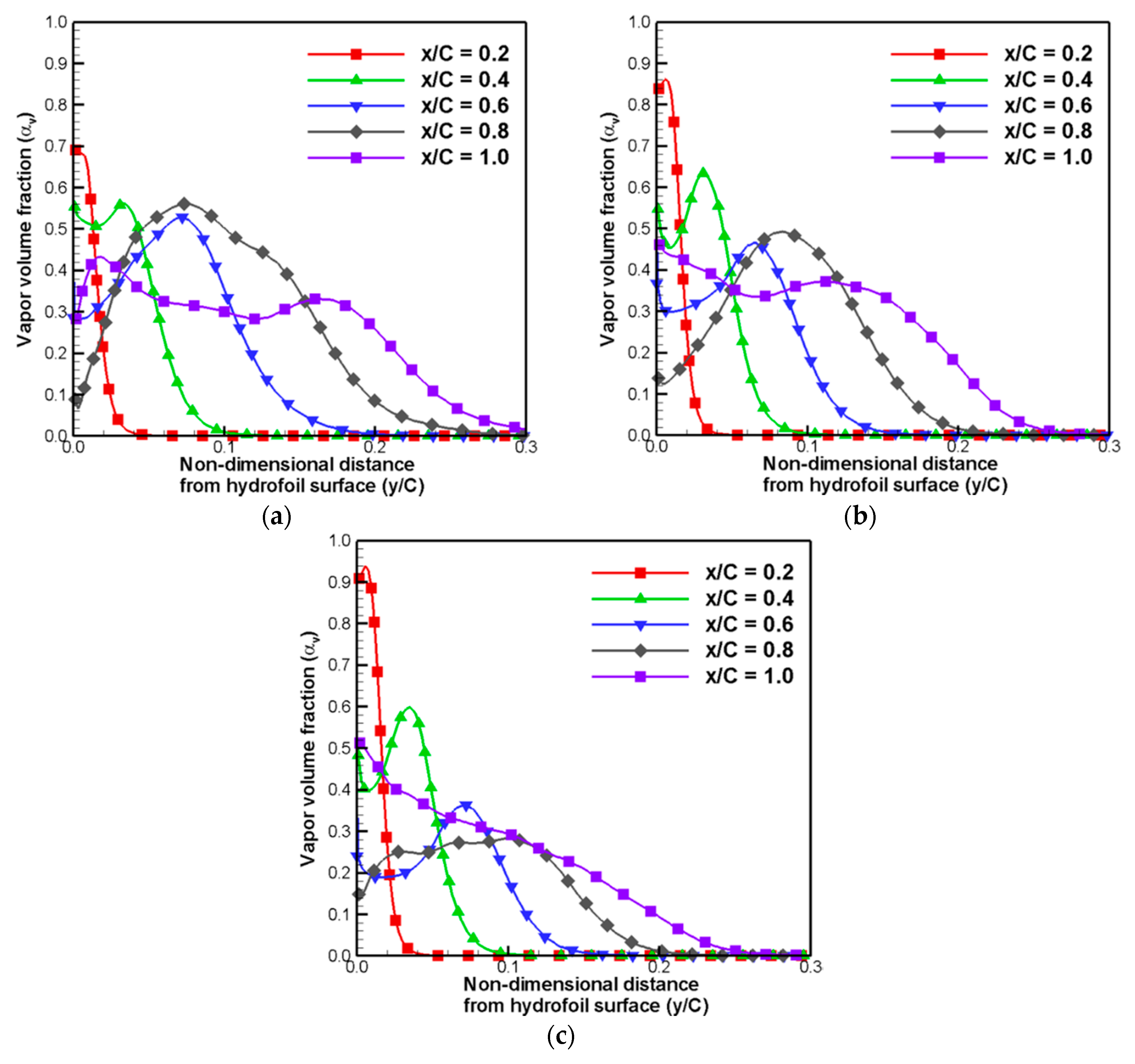
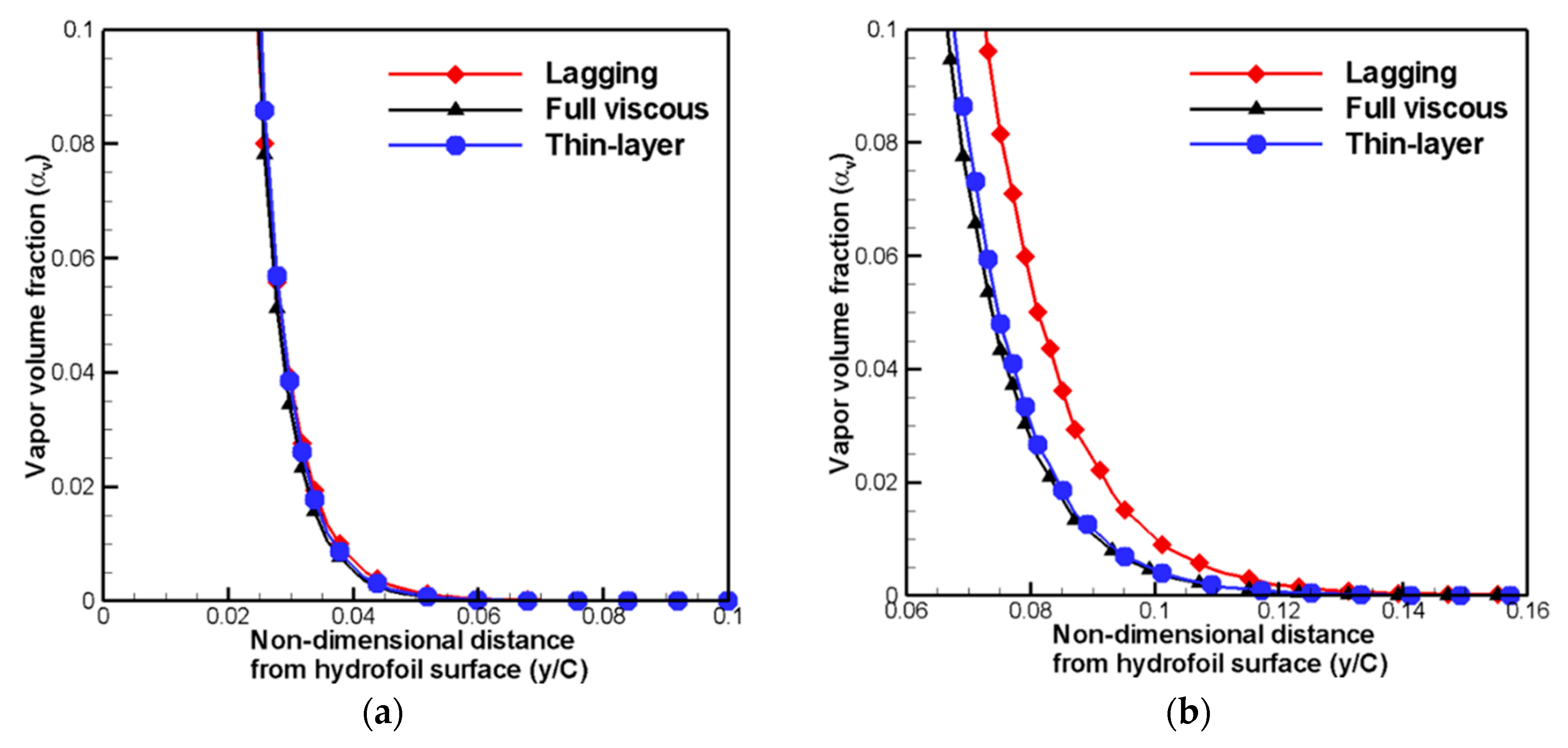
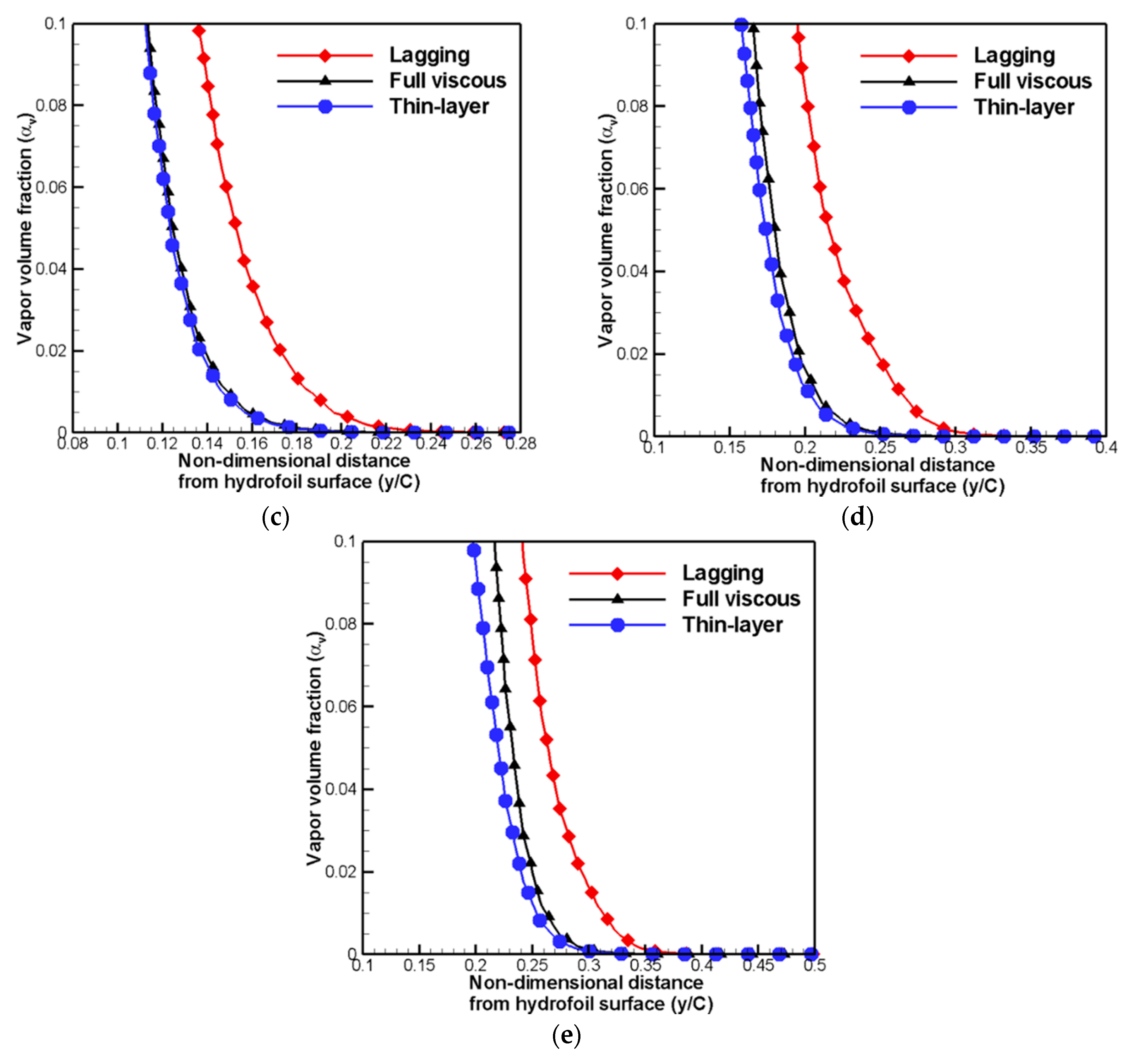
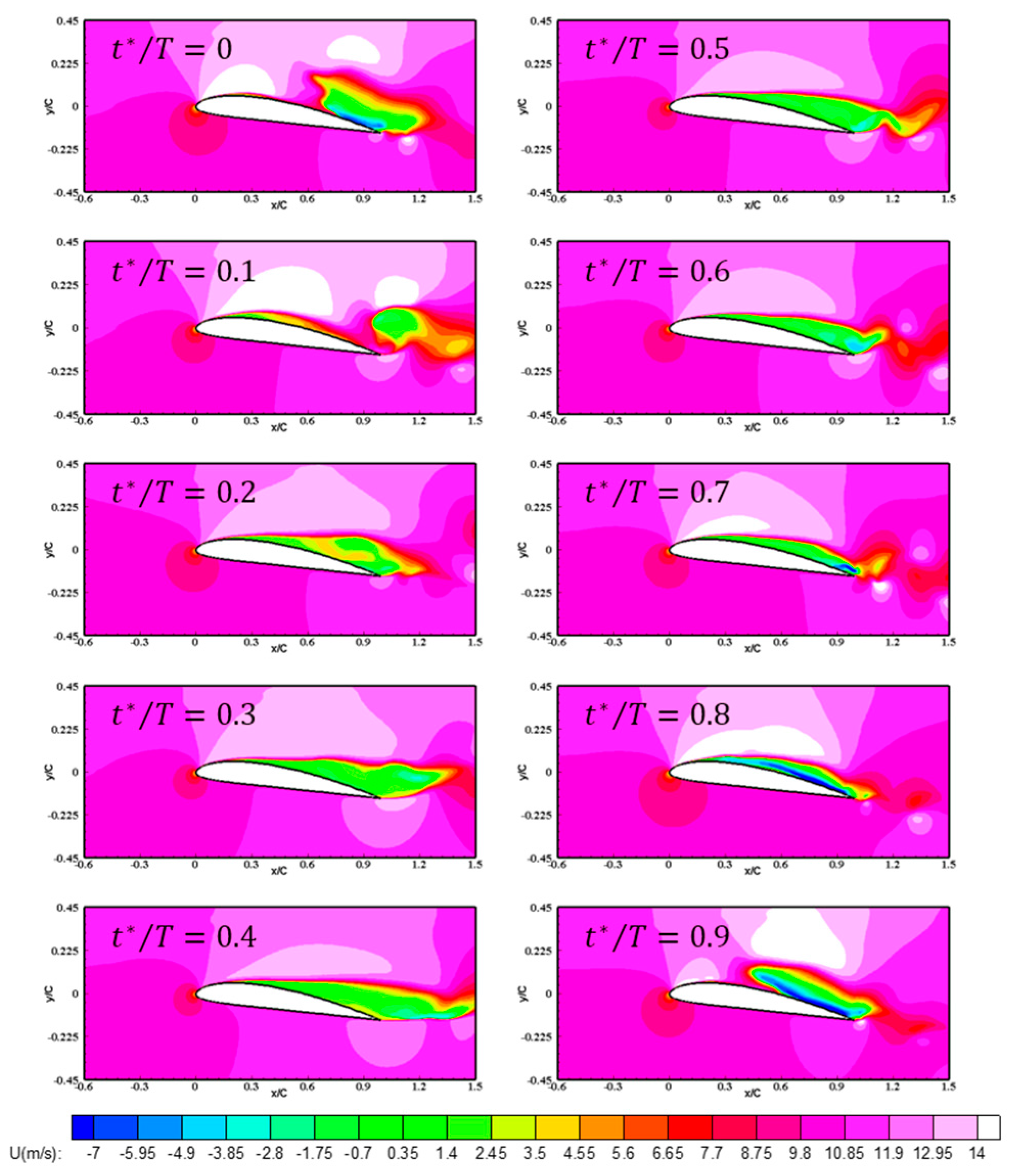
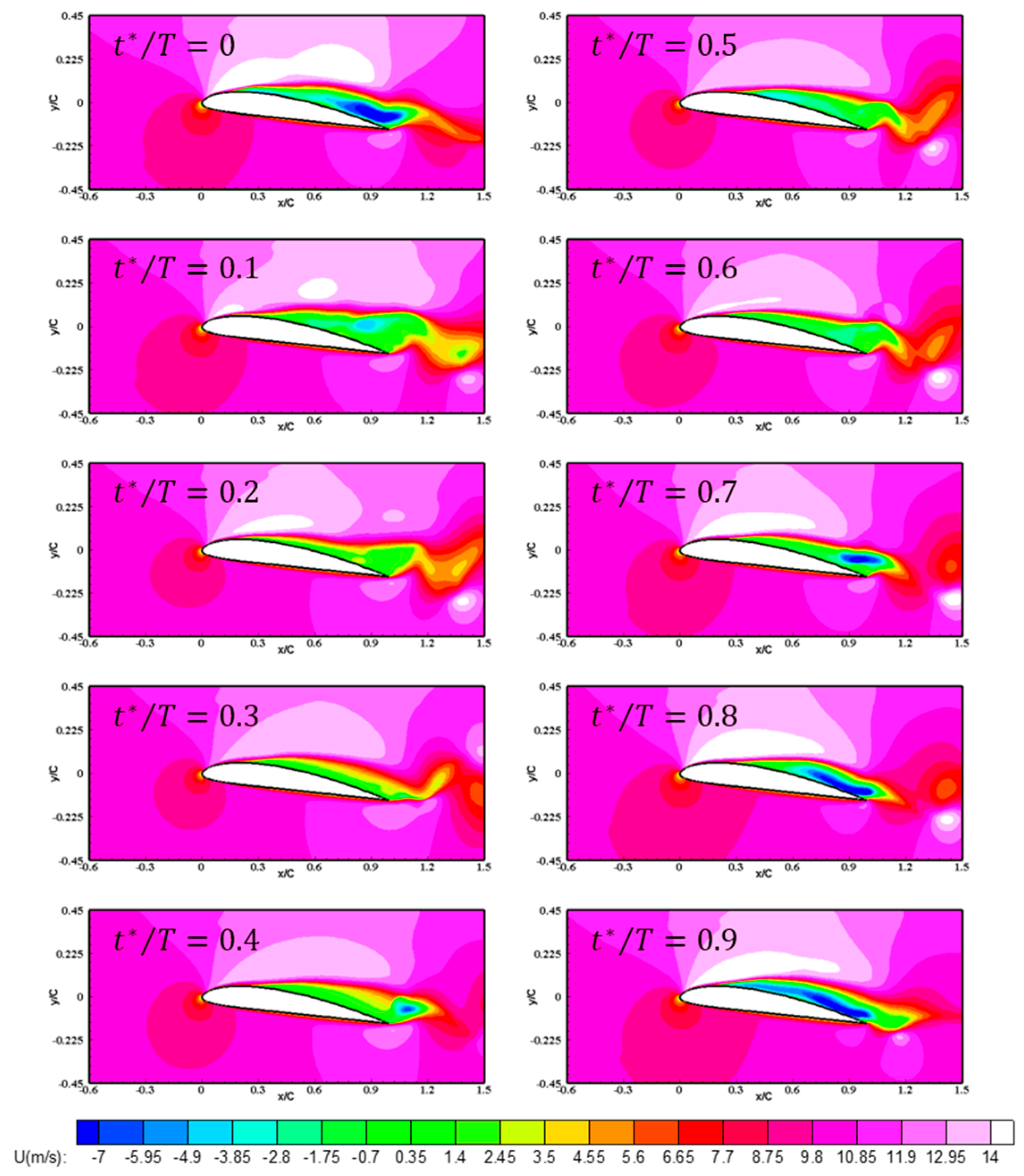
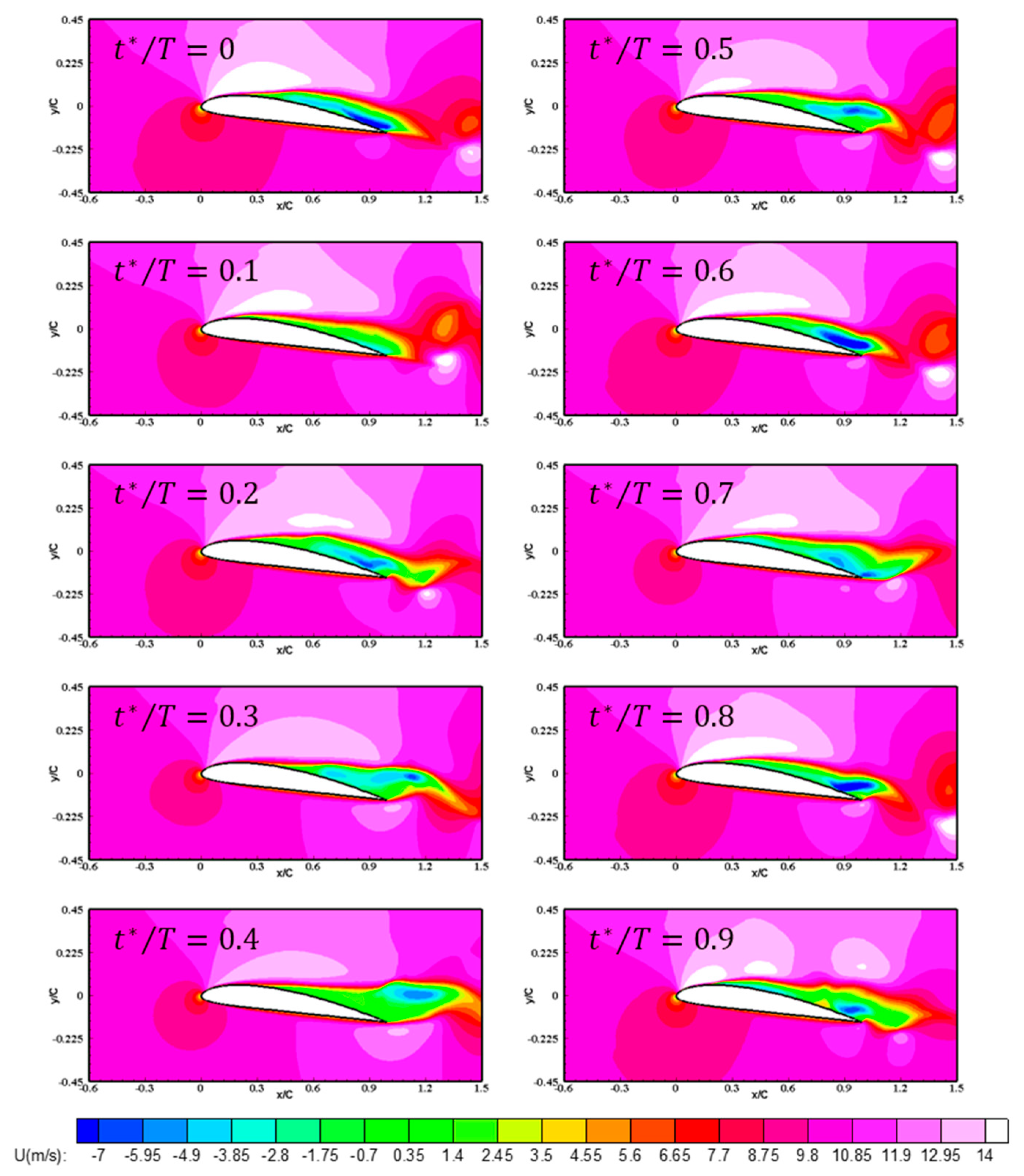
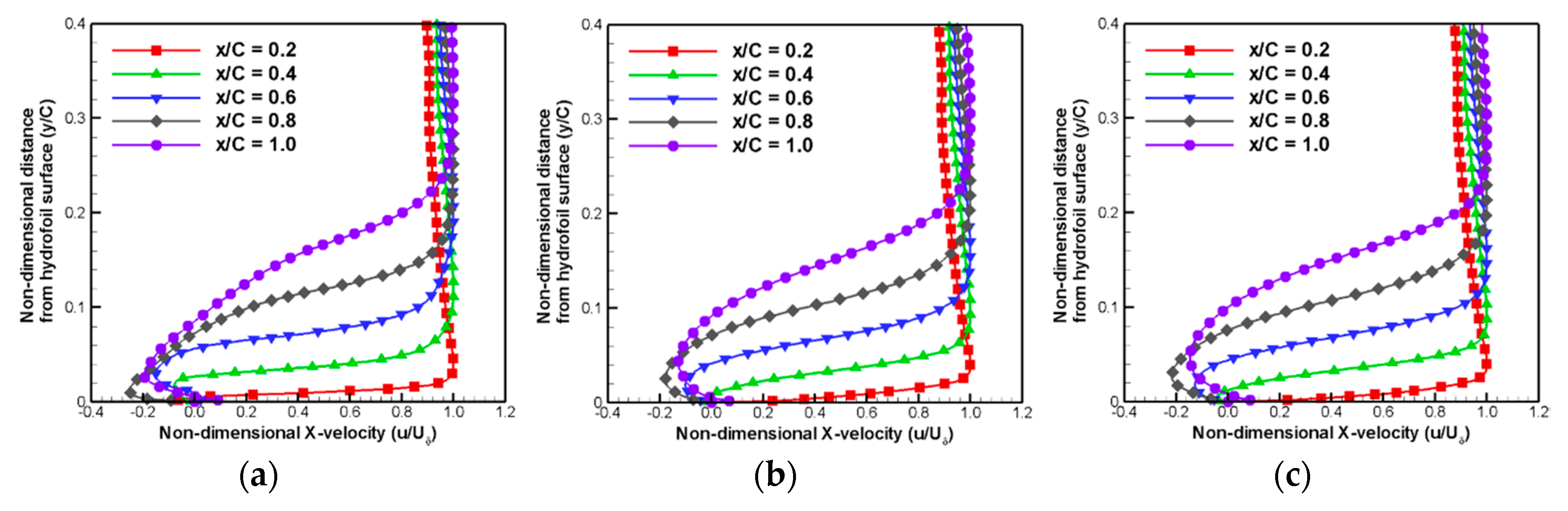
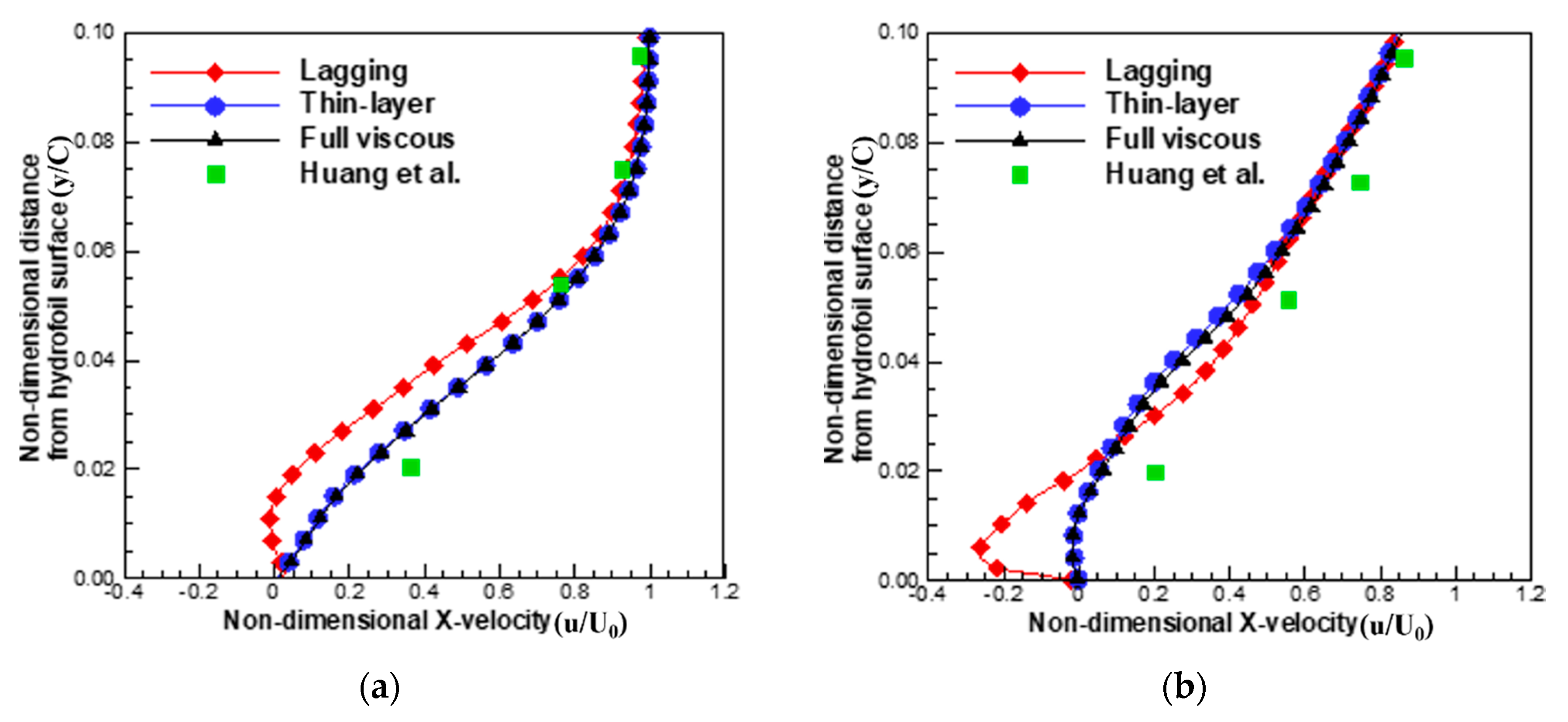
4.2. Viscous Effects on Flow Field Prediction
4.3. Viscous Effects on Hydro-Acoustic Field Prediction
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Shen, Y.T.; Dimotakis, P.E. The influence of surface cavitation on hydrodynamic forces. In Proceedings of the 22nd American Towing Tank Conference, St. John’s, NL, Canada, 8–11 August 1989. [Google Scholar]
- Kawanami, H.; Kato, H.; Yamaguchi, H.; Tanimura, M.; Tagaya, Y. Mechanism and control of cloud cavitation. J. Fluids Eng. 1997, 119, 788–794. [Google Scholar] [CrossRef]
- Wang, G.; Senocak, I.; Shyy, W.; Ikohagi, T.; Cao, S. Dynamics of attached turbulent cavitating flows. Prog. Aerosp. Sci. 2001, 37, 551–581. [Google Scholar] [CrossRef]
- Park, C.; Seol, H.; Kim, K.; Seong, W. A study on propeller noise source localization in a cavitation tunnel. Ocean Eng. 2009, 36, 754–762. [Google Scholar] [CrossRef]
- Kopriva, J.; Arndt, R.E.A.; Amromin, E.L. Improvement of hydrofoil performance by partial ventilated cavitation in steady flow and periodic gusts. J. Fluids Eng. 2008, 130, 031301. [Google Scholar] [CrossRef]
- Karn, A.; Arndt, R.E.A.; Hong, J. Dependence of supercavity closure upon flow unsteadiness. Exp. Therm. Fluid Sci. 2015, 68, 493–498. [Google Scholar] [CrossRef]
- Merkle, C.L.; Feng, J.H.; Buelow, P.E.O. Computational modeling of the dynamics of sheet cavitation. In Proceedings of the 3rd International Symposium on Cavitation, Grenoble, France, 7–10 April 1998. [Google Scholar]
- Singhal, A.K.; Athavale, M.M.; Li, H.; Jiang, Y. Mathematical basis and validation of the full cavitation model. J. Fluids Eng. 2002, 124, 617–624. [Google Scholar] [CrossRef]
- Kunz, R.F.; Boger, D.A.; Stinebrin, D.R.; Chyczewsky, T.S.; Lindau, J.W.; Gilbeling, H.J.; Venkateswaran, S.; Govindan, T.R. A preconditioned Navier-Stokes method for two-phase flows with application to cavitation prediction. Comput. Fluids 2000, 29, 849–875. [Google Scholar] [CrossRef]
- Huang, D.G. Preconditioned dual-time procedures and its application to simulating the flow with cavitations. J. Comput. Phys. 2007, 223, 685–689. [Google Scholar] [CrossRef]
- Esfahanian, V.; Akbarzadeh, P. Numerical investigation on a new local preconditioning method for solving the incompressible inviscid, non-cavitating and cavitating flows. J. Frankl. Inst. 2011, 348, 1208–1230. [Google Scholar] [CrossRef]
- Ha, C.T.; Park, W.G. Evaluation of a new scaling term in preconditioning schemes for computations of compressible cavitating and ventilated flows. Ocean Eng. 2016, 126, 432–466. [Google Scholar] [CrossRef]
- Johansen, S.T.; Wu, J.; Shyy, W. Filter-based unsteady RANS computations. Int. J. Heat Fluid Flow 2004, 25, 10–21. [Google Scholar] [CrossRef]
- Tseng, C.; Wang, L. Investigation of empirical coefficients of cavitation and turbulence model through steady and unsteady turbulent cavitating flows. Comput. Fluids 2014, 103, 262–274. [Google Scholar] [CrossRef]
- Zhang, D.; Wang, H.; Shi, W.; Zhang, G.; Van Esch, B.B. Numerical analysis of the unsteady behavior of cloud cavitation around a hydrofoil based on an improved filter-based model. J. Hydrodyn. 2015, 27, 795–808. [Google Scholar] [CrossRef]
- Kim, S.; Cheong, C.; Park, W.G. Numerical investigation on cavitation flow of hydrofoil and its flow noise with emphasis on turbulence models. AIP Adv. 2017, 7, 065114. [Google Scholar] [CrossRef]
- Venkateswaran, S.; Merkle, C.L. Dual time stepping and preconditioning for unsteady computations. In Proceedings of the 33rd Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 1995. [Google Scholar]
- Venkateswaran, S.; Lindau, J.W.; Kunz, R.F.; Merkle, C.L. Preconditioning algorithms for the computation of multi-phase mixture flows. In Proceedings of the 39th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 8–11 January 2001. [Google Scholar]
- Owis, F.M.; Nayfeh, A.H. Numerical simulation of 3-D incompressible, multi-phase flows over cavitating projectiles. Eur. J. Mech. B Fluids 2004, 23, 339–351. [Google Scholar] [CrossRef]
- Wagner, W.; Kretzschmar, H. International Steam Tables: Properties of Water and Steam Based on the Industrial Formulation IAPWS0IF97, 2nd ed.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007; ISBN 978-3-540-21419-9. [Google Scholar]
- Jones, W.P.; Launder, B.E. The prediction of laminarization with a two-equation model of turbulence. Int. J. Heat Mass Transf. 1972, 15, 301–314. [Google Scholar] [CrossRef]
- Jones, W.P.; Launder, B.E. The calculation of low-Reynolds-number phenomena with a two-equation model of turbulence. Int. J. Heat Mass Transf. 1973, 16, 1119–1130. [Google Scholar] [CrossRef]
- Hoffmann, K.A. Chiang, S.T. Computational Fluid Dynamics, 4th ed.; Engineering Education System: Wichita, KS, USA, 2000; ISBN 978-0962373107. [Google Scholar]
- Beam, R.M.; Warming, R.F. An implicit factored scheme for the compressible Navier-Stokes equations. AIAA J. 1978, 16, 393–402. [Google Scholar] [CrossRef]
- Steger, J.L. Implicit finite-difference simulation of flow about arbitrary two-dimensional geometries. AIAA J. 1978, 16, 679–686. [Google Scholar] [CrossRef]
- Pletcher, R.; Chen, K. On solving the compressible Navier-Stokes equations for unsteady flows at very low Mach number. In Proceedings of the 11th Computational Fluid Dynamics Conference, Orlando, FL, USA, 6–9 July 1993. [Google Scholar]
- Wang, Y.; Sun, X.J.; Zhu, B.; Zhang, H.J.; Huang, D.G. Effect of blade vortex interaction on performance of Darrieus-type cross flow marine current turbine. Renew. Energy 2016, 86, 316–323. [Google Scholar] [CrossRef]
- Granier, B.; Lerat, A.; Wu, Z. An implicit centered scheme for steady and unsteady incompressible one and two-phase flows. Comput. Fluids 1997, 26, 373–393. [Google Scholar] [CrossRef]
- Senocak, I.; Shyy, W. A pressure-based method for turbulent cavitating flow computations. J. Comput. Phys. 2001, 176, 363–383. [Google Scholar] [CrossRef]
- Pulliam, T.H.; Steger, J.L. Implicit finite-difference simulations of three-dimensional compressible flow. AIAA J. 1980, 18, 159–167. [Google Scholar] [CrossRef]
- Tysinger, T.L.; Caughey, D.A. Implicit multigrid algorithm for the Navier-Stokes equations. In Proceedings of the 29th Aerospace Sciences Meeting, Reno, NV, USA, 7–10 January 1991. [Google Scholar]
- Ffowcs Williams, J.E.; Hawkings, D.L. Sound generation by turbulence and surfaces in arbitrary motion. Philos. Trans. R. Soc. A 1969, 264, 321–342. [Google Scholar] [CrossRef]
- Singer, B.A.; Lockard, D.P.; Lilley, G.M. Hybrid acoustic preditions. Comput. Math. Appl. 2003, 46, 647–669. [Google Scholar] [CrossRef]
- Khorrami, M.R.; Singer, B.A.; Berkman, M.E. Time-accurate simulations and acoustic analysis of slat free shear layer. AIAA J. 2002, 40, 1284–1291. [Google Scholar] [CrossRef]
- Wang, M.; Freund, J.B.; Lele, S.K. Computational prediction of flow-generated sound. Annu. Rev. Fluid Mech. 2006, 38, 483–512. [Google Scholar] [CrossRef]
- Farassat, F.; Casper, J.H. Toward an airframe noise prediction methodology: Survey of current approaches. In Proceedings of the 44th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 9–12 January 2006. [Google Scholar]
- Lighthill, M.J. On sound generated aerodynamically. I. General theory. Proc. R. Soc. Lond. A Math. Phys. Sci. 1952, 211, 564–587. [Google Scholar] [CrossRef]
- Lighthill, M.J. On sound generated aerodynamically. II. Turbulence as a source of sound. Proc. R. Soc. Lond. A Math. Phys. Sci. 1954, 222, 1–32. [Google Scholar] [CrossRef]
- Curle, N. The influence of solid boundaries upon aerodynamic sound. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 1955, 231, 505–514. [Google Scholar] [CrossRef]
- Roohi, E.; Zahiri, A.P.; Passandideh-Fard, M. Numerical simulation of cavitation around a two-dimensional hydrofoil using VOF method and LES turbulence model. Appl. Math. Model. 2013, 37, 6469–6488. [Google Scholar] [CrossRef]
- Huang, B.; Young, Y.L.; Wang, G.; Shyy, W. Combined experimental and computational investigation of unsteady structure of sheet/cloud cavitation. J. Fluids Eng. 2013, 135, 071301. [Google Scholar] [CrossRef]
- Watanabe, S.; Tsujimoto, Y.; Furukawa, A. Theoretical analysis of transitional and partial cavity instabilities. J. Fluids Eng. 2001, 123, 692–697. [Google Scholar] [CrossRef]
- Leroux, J.B.; Coutier-Delgosha, O.; Astolfi, J.A. A joint experimental and numerical study of mechanisms associated to instability of partial cavitation on two-dimensional hydrofoil. Phys. Fluids 2005, 17, 052101. [Google Scholar] [CrossRef]
- Coutier-Delgosha, O.; Stutz, B.; Vabre, A.; Legoupil, S. Analysis of cavitating flow structure by experimental and numerical investigations. J. Fluid Mech. 2007, 578, 171–222. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | (m/s) | (m) | Angle of Attack (°) | ||
|---|---|---|---|---|---|
| Values | 0.8 | 10 | 0.07 | 8 |
| Location | Experiments | Viscous Lagging | Full Viscous | Thin-Layer |
|---|---|---|---|---|
| 0.0195 | 0.0285 | 0.0280 | 0.0286 | |
| 0.0658 | 0.0811 | 0.0738 | 0.0748 | |
| 0.1166 | 0.1529 | 0.1245 | 0.1234 | |
| 0.1834 | 0.2161 | 0.1798 | 0.1737 | |
| 0.2339 | 0.2637 | 0.2324 | 0.2198 |
| Viscous Flux Treatment | Viscous Lagging | Full Viscous | Thin-Layer |
|---|---|---|---|
| PWL (dB) | 168.8 | 177.1 | 177.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.; Cheong, C.; Park, W.-G. Numerical Investigation into Effects of Viscous Flux Vectors on Hydrofoil Cavitation Flow and Its Radiated Flow Noise. Appl. Sci. 2018, 8, 289. https://doi.org/10.3390/app8020289
Kim S, Cheong C, Park W-G. Numerical Investigation into Effects of Viscous Flux Vectors on Hydrofoil Cavitation Flow and Its Radiated Flow Noise. Applied Sciences. 2018; 8(2):289. https://doi.org/10.3390/app8020289
Chicago/Turabian StyleKim, Sanghyeon, Cheolung Cheong, and Warn-Gyu Park. 2018. "Numerical Investigation into Effects of Viscous Flux Vectors on Hydrofoil Cavitation Flow and Its Radiated Flow Noise" Applied Sciences 8, no. 2: 289. https://doi.org/10.3390/app8020289
APA StyleKim, S., Cheong, C., & Park, W. -G. (2018). Numerical Investigation into Effects of Viscous Flux Vectors on Hydrofoil Cavitation Flow and Its Radiated Flow Noise. Applied Sciences, 8(2), 289. https://doi.org/10.3390/app8020289