Design and Analysis of a Floor Radiant Heating System Based on Energy Substitution Technology

Abstract
:1. Introduction
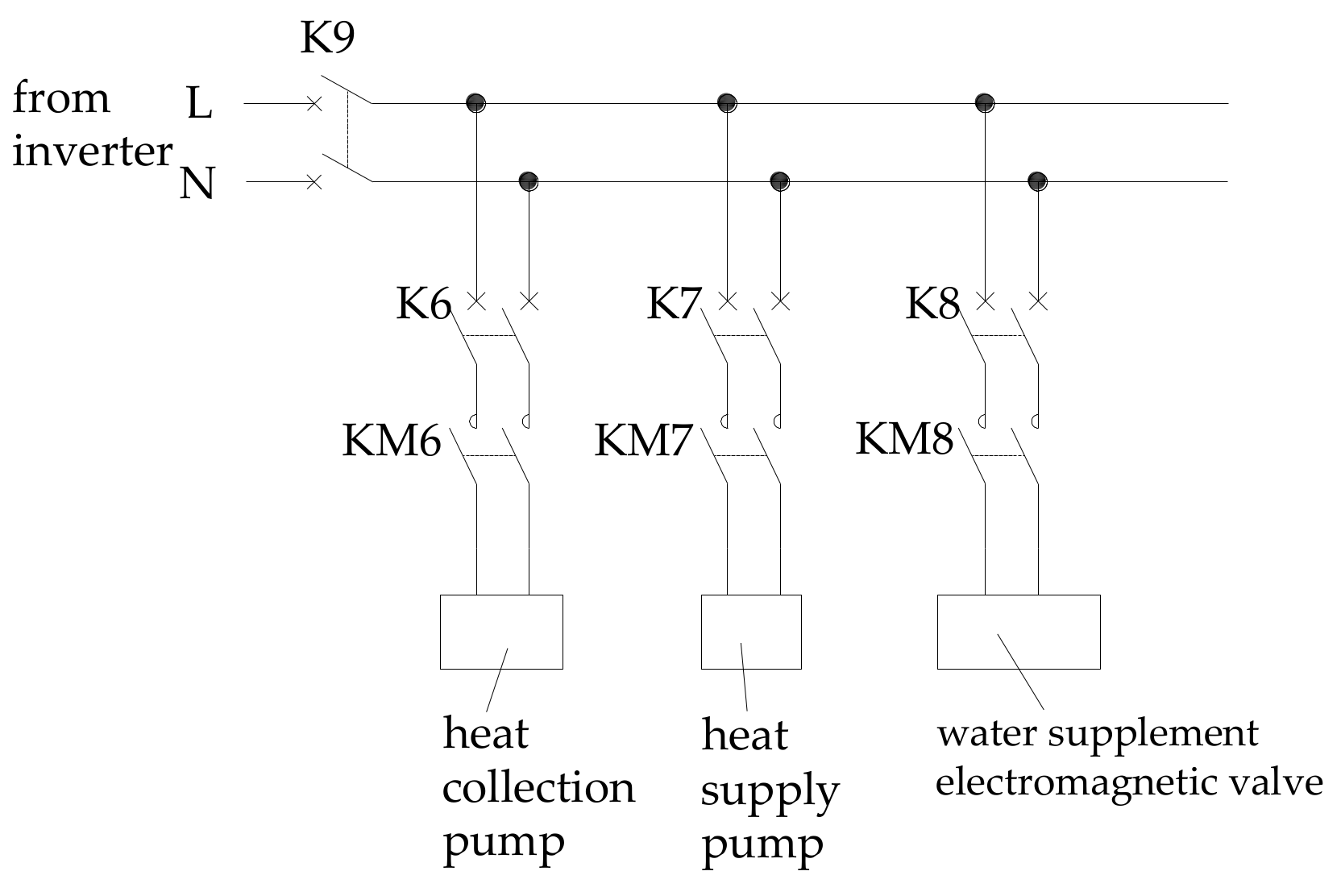
2. Heating System Design
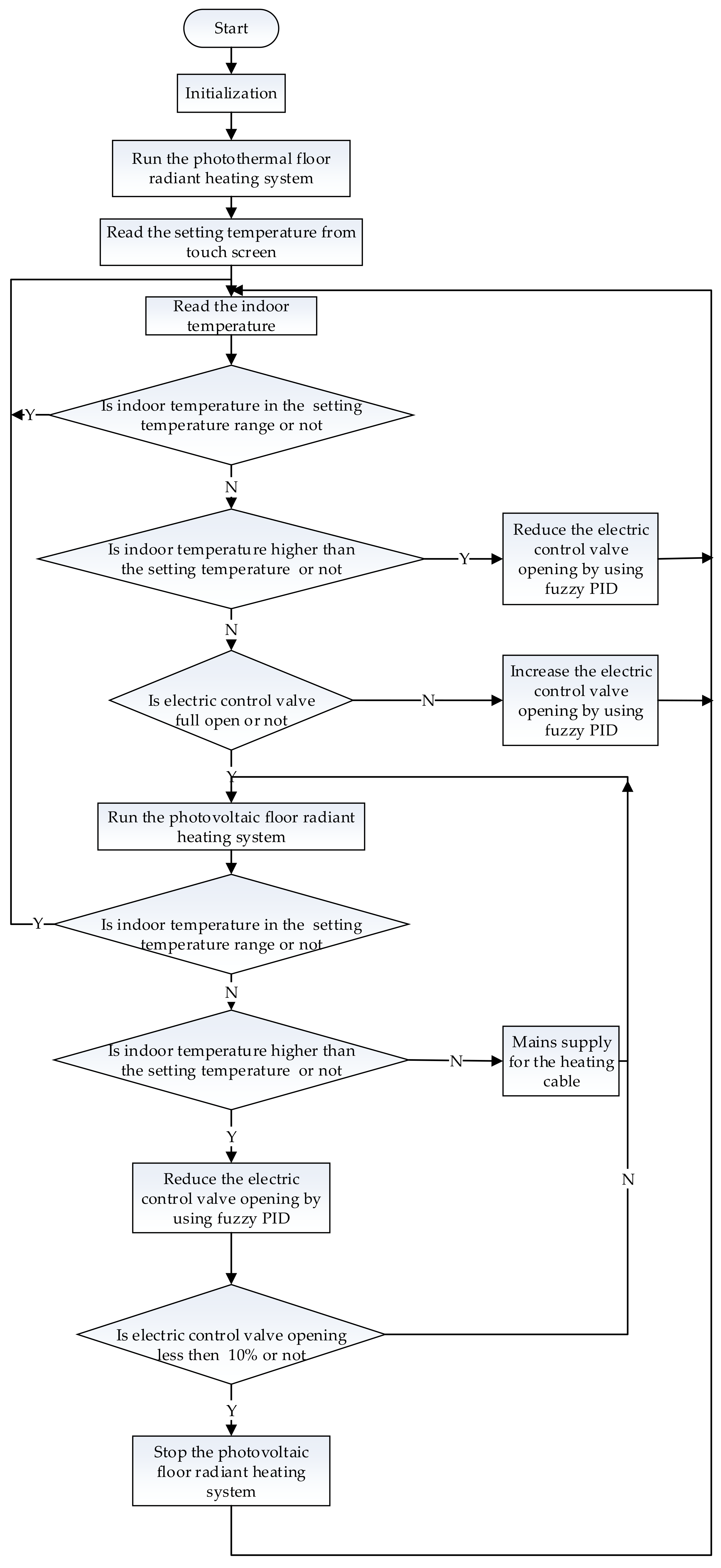
3. Fuzzy PID Control System Design
- , , represent the final parameter value of the PID controller
- , , represent the initial parameter value of the PID controller
- , , represent the parameter revision value of the PID controller
- , , represent the scaling factors of the various parameters.
4. Experimental System Design
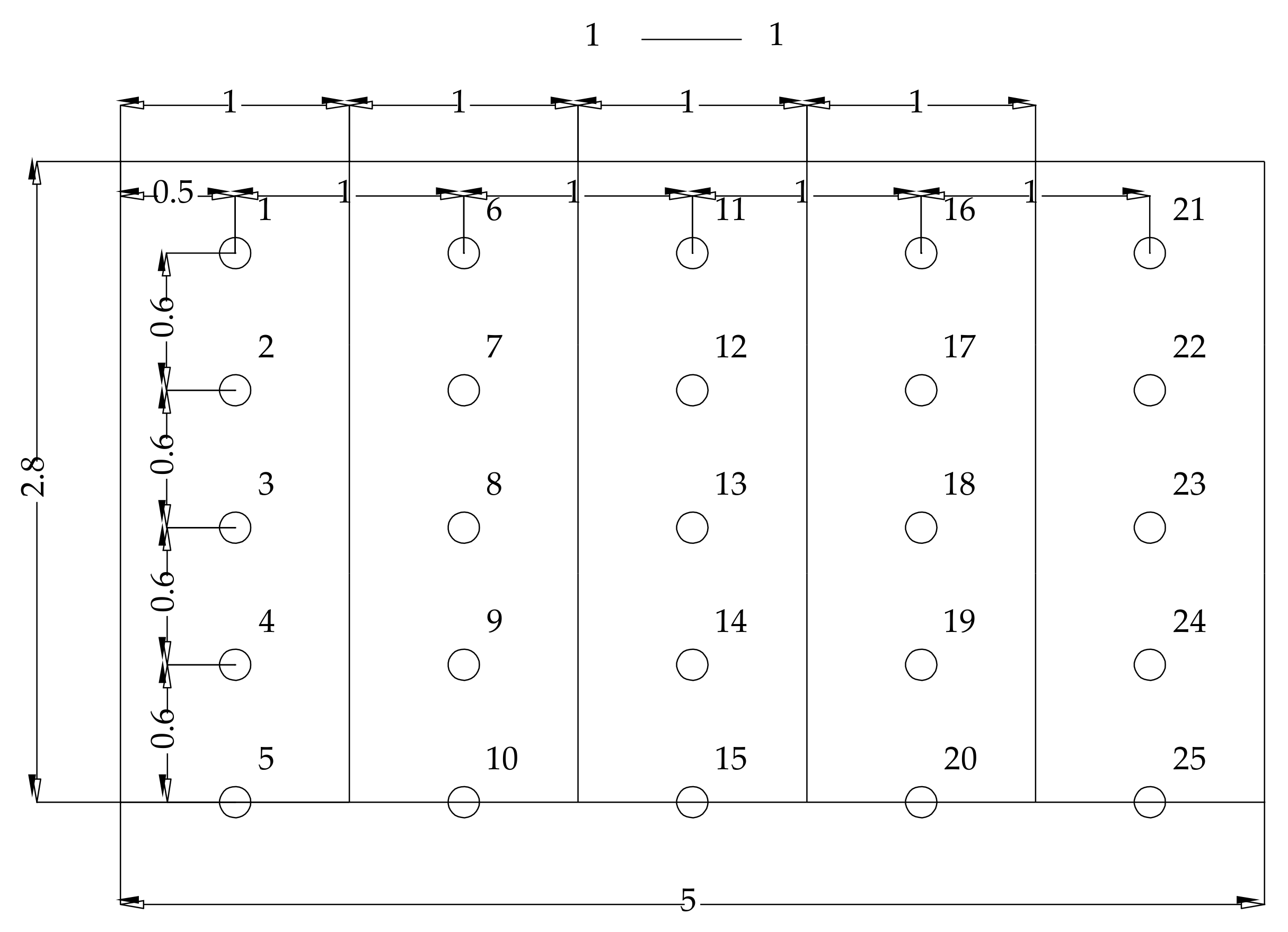
4.1. Indoor Temperature Distribution Experiment
- Measure the geometric dimensions of the room and obtain the geometric parameters of the room.
- Let the thermocouples connect to the data acquisition device and begin the interactive debug.
- Start the experimental test and wait for a period of time until the room reaches a steady state. Then, read the thermocouple data once every 60 s and take the average value over a period of 1800 s as the final experiment data.
- Record all the data.
4.2. Indoor Temperature Change Rate Experiment
- d.
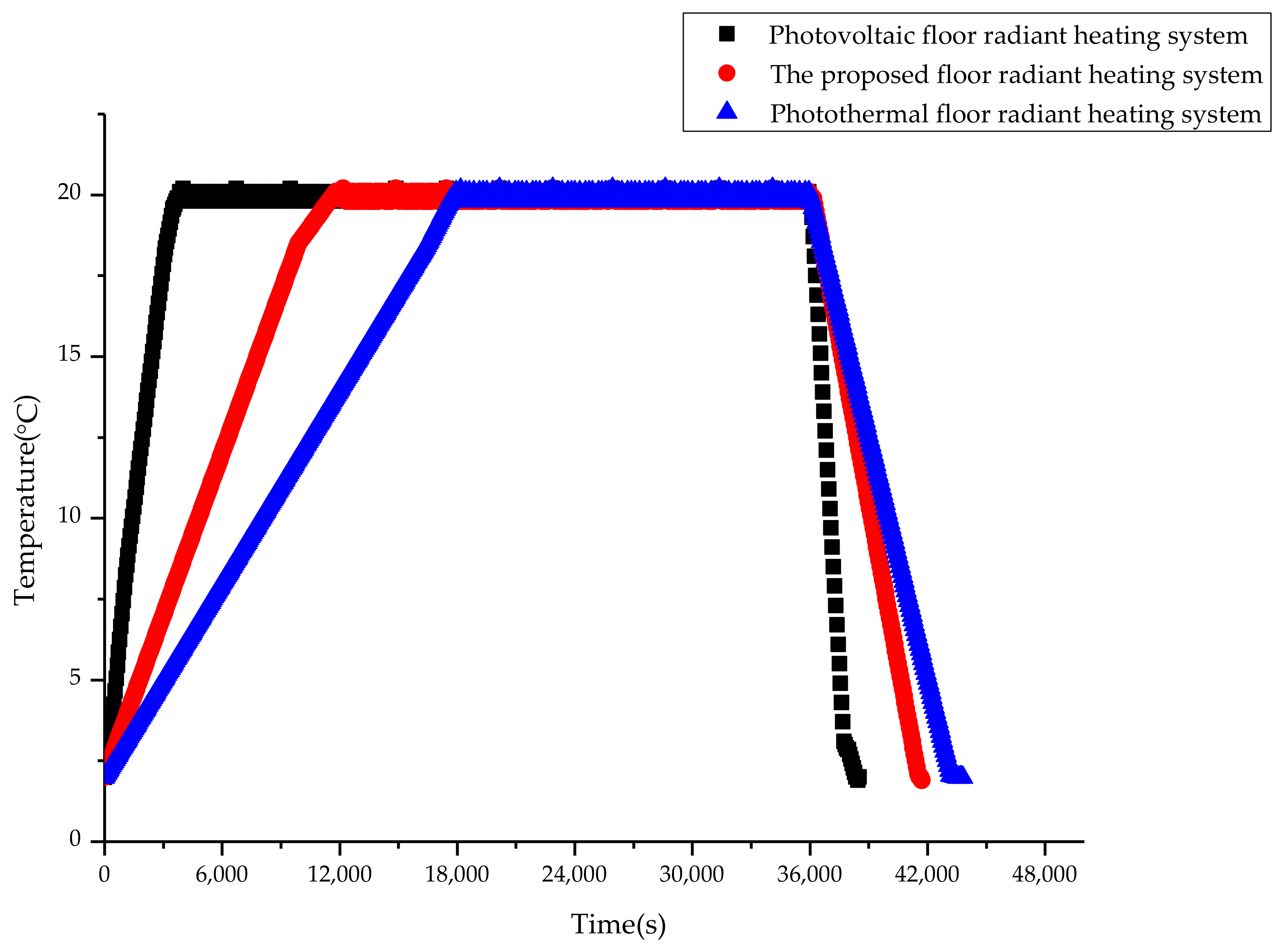
- Choose the photovoltaic floor radiant heating system and begin the experimental test from the initial state (2 °C). After 36,000 s, stop the photovoltaic floor radiant heating system until the indoor temperature returns to its initial state. Collect data from the 125 thermocouples every 60 s during the whole test process and take the average temperature as the final value of the indoor temperature. The sampling period of this experiment is 60 s.
- e.
- Record all the data.
- f.
- Select the photothermal floor radiant heating system and the proposed floor radiant heating system to repeat the above steps.
5. Results and Discussion
5.1. Indoor Temperature Distribution
- a.
- The test point of the minimum is set near the wall and close to the floor, which means that the position is quite far away from the heat source;
- b.
- The test point of the maximum is in the middle of the heating system, which has less heat loss and a smaller heat change, so the measured temperature is relatively high.
5.2. Indoor Temperature Change Rate
6. Actual System Energy Savings Calculation and Analysis
6.1. Calculation
- a.
- For the normal operation of the proposed floor radiant heating system, the following conditions need to be satisfied for calculation purposes; these conditions exist in the actual system:
- (a)
- The heat transfer process is stable during the normal operation of the proposed floor radiant heating system. All heat transfer analyses occur under steady state conditions.
- (b)
- The room temperature is constant during the normal operation of the proposed floor radiant heating system.
- (c)
- The insulation material, with a certain thickness, is laid in the floor. The heat transferred to the underside through the insulation material and the heat lost from the floor are negligible.
- (d)
- The thermal contact resistances are negligible. The material quality of all layers is uniform, and the physical properties are the same and constant.
- (e)
- Hot water flow is stable in the photothermal floor radiant heating system; the heating cable current is stable in the photovoltaic floor radiant heating system.
- (f)
- The surface temperature of hot water pipes and heating cables is uniform.
- (g)
- The normal operation of the proposed floor radiant heating system does not involve starting, stopping or other non-normal process.
- b.
- Calculation of heat calculation provided by floor radiant heating system
- c.
- The heat provided by the photothermal floor radiant heating system of the proposed floor radiant heating system is calculated.
- d.
- The heat provided by the photovoltaic floor radiant heating system of the proposed floor radiant heating system is calculated.
- e.
- Calculation of the total heat provided by the proposed floor radiant heating system
- f.
- Revised calculation of the total heat provided by the proposed floor radiant heating system
- g.
- Calculation of total heat provided by the proposed floor radiant heating system in extreme casesThere are three extreme cases:
- (a)
- The photovoltaic floor radiant heating system cannot provide heat, and the photothermal floor radiant heating system can provide only a little heat. Most heat is provided by the auxiliary heat source. The total heat (Equation (16)):where:is the total heat provided by the proposed floor radiant heating system in the first extreme case, W/m2.
- (b)
- Neither the photovoltaic floor radiant heating system nor the photothermal floor radiant heating system can provide heat. The total heat is provided by the auxiliary heat source. The photothermal floor radiant heating system must be turned off immediately to avoid indoor heat loss when the photothermal floor radiant heating system cannot provide heat. The total heat (Equations (17)):where:is the total heat provided by the proposed floor radiant heating system in the second extreme case, W/m2.
- (c)
- The photothermal floor radiant heating system cannot provide heat and the photovoltaic floor radiant heating system can provide only a little heat. The major heat is provided by the auxiliary heat source. The total heat (Equations (18)):where:is the total heat provided by the proposed floor radiant heating system in the third extreme case, W/m2.
The photothermal floor radiant heating system must be turned off immediately to prevent indoor heat loss when the photothermal floor radiant heating system cannot provide heat.
6.2. Operation and Analysis
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bojić, M.; Cvetković, D.; Marjanović, V.; Blagojević, M.; Djordjević, Z. Performances of low temperature radiant heating systems. Energy Build. 2013, 61, 233–238. [Google Scholar] [CrossRef]
- Izquierdo, M.; Pablo de Agustín, E.M. A micro photovoltaic-heat pump system for house heating by radiant floor: Some experimental results. Energy Procedia 2014, 48, 865–875. [Google Scholar] [CrossRef]
- Izquierdo, M.; Agustín-Camacho, P.D. Solar heating by radiant floor: Experimental results and emission reduction obtained with a micro photovoltaic-heat pump system. Appl. Energy 2015, 147, 297–307. [Google Scholar] [CrossRef]
- Jeong, Y.D.; Yu, M.G.; Nam, Y. Feasibility Study of a Heating, Cooling and Domestic Hot Water System Combining a Photovoltaic-Thermal System and a Ground Source Heat Pump. Energies 2017, 10, 1243. [Google Scholar] [CrossRef]
- Sarbu, I.; Sebarchievici, C. Performance Evaluation of Radiator and Radiant Floor Heating Systems for an Office Room Connected to a Ground-Coupled Heat Pump. Energies 2016, 9, 228. [Google Scholar] [CrossRef]
- Sebarchievici, C.; Sarbu, I. Performance of an experimental ground-coupled heat pump system for heating, cooling and domestic hot-water operation. Renew. Energy 2015, 76, 148–159. [Google Scholar] [CrossRef]
- Dupeyrat, P.; Ménézo, C.; Fortuin, S. Study of the thermal and electrical performances of PVT solar hot water system. Energy Build. 2014, 68, 751–755. [Google Scholar] [CrossRef]
- Herrando, M.; Markides, C.N.; Hellgardt, K. A UK-based assessment of hybrid PV and solar-thermal systems for domestic heating and power: System performance. Appl. Energy 2014, 122, 288–309. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, Z.J. Design and Research of the Movable Hybrid Photovoltaic-Thermal (PVT) System. Energies 2017, 10, 507. [Google Scholar] [CrossRef]
- Zhang, P.F.; Dang, K.F.; Zhang, Y.J. Control and Simulation of Temperature for Injection Molding Machines Based on Self-Adaptive Fuzzy PID Control Method. China Plast. 2013, 27, 85–89. [Google Scholar]
- Montoya-Marquez, O.; Flores-Prieto, J.J. The Effect of the Angle of Inclination on the Efficiency in a Medium-Temperature Flat Plate Solar Collector. Energies 2017, 10, 71. [Google Scholar] [CrossRef]
- Valíček, J.; Palková, Z.; Harničárová, M.; Kušnerová, M.; Lukáč, O. Thermal and Performance Analysis of a Gasification Boiler and Its Energy Efficiency Optimization. Energies 2017, 10, 1066. [Google Scholar] [CrossRef]
- Moradi, H.; Setayesh, H.; Alasty, A. PID-Fuzzy control of air handling units in the presence of uncertainty. Int. J. Therm. Sci. 2016, 109, 123–135. [Google Scholar] [CrossRef]
- Chao, C.T.; Sutarna, N.; Chiou, J.S.; Wang, C.J. Equivalence between Fuzzy PID Controllers and Conventional PID Controllers. Appl. Sci. 2017, 7, 513. [Google Scholar] [CrossRef]
- Xia, D.Z.; Kong, L.; Hu, Y.W.; Ni, P.Z. Silicon micro gyroscope temperature prediction and control system based on BP neural network and Fuzzy-PID control method. Meas. Sci. Technol. 2015, 26. [Google Scholar] [CrossRef]
- Gu, Q.; Zheng, F.L.; Liu, B.B.; Yang, W.Y. Application of a New Smith Fuzzy PID in Electric Boiler Temperature Control System. Appl. Mech. Mater. 2015, 727–728, 633–636. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature (°C) | 0 | 0.6 m | 1.2 m | 1.8 m | 2.4 m |
|---|---|---|---|---|---|
| Minimum | 24.13 | 25.69 | 25.7 | 25.66 | 25.2 |
| Maximum | 29.96 | 26.94 | 26.92 | 26.89 | 26.71 |
| Average | 27.21 | 26.27 | 26.25 | 26.25 | 25.97 |
| The max temperature difference | 5.83 | 1.25 | 1.22 | 1.23 | 1.51 |
| Standard deviation | 1.8737 | 0.3587 | 0.3563 | 0.3633 | 0.4323 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, L.; Cao, B. Design and Analysis of a Floor Radiant Heating System Based on Energy Substitution Technology. Appl. Sci. 2018, 8, 491. https://doi.org/10.3390/app8040491
Zhang L, Cao B. Design and Analysis of a Floor Radiant Heating System Based on Energy Substitution Technology. Applied Sciences. 2018; 8(4):491. https://doi.org/10.3390/app8040491
Chicago/Turabian StyleZhang, Lian, and Baowen Cao. 2018. "Design and Analysis of a Floor Radiant Heating System Based on Energy Substitution Technology" Applied Sciences 8, no. 4: 491. https://doi.org/10.3390/app8040491
APA StyleZhang, L., & Cao, B. (2018). Design and Analysis of a Floor Radiant Heating System Based on Energy Substitution Technology. Applied Sciences, 8(4), 491. https://doi.org/10.3390/app8040491