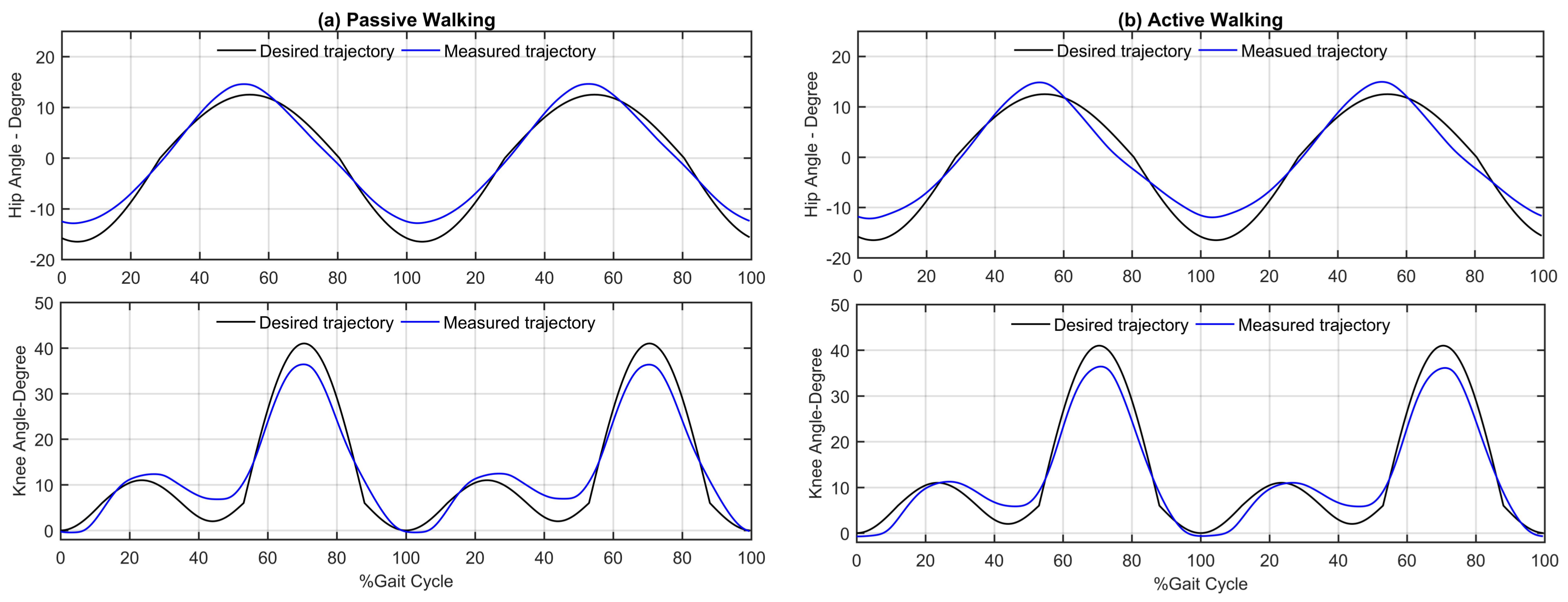
4.1. Trajectory Tracking Control
Recently, the fractional order calculus has become an interesting topic and extensively used in control design [
31,
32,
33]. In comparison with the conventional controllers based on integer order integrator and differentiator, the fractional order controller offers more degree of freedom which can be utilized to further improve the performance of the control system. The basic definitions and practical implementation of the fractional order calculus are provided in
Appendix A in detail. In this research, a modified computed torque controller is proposed to enhance the tracking performance of the robotic orthosis, in the sense that the conventional integer order derivative is replaced by a fractional order one.
In Equation (
13),
is the reference trajectory,
is the tracking error,
and
are positive definite gain matrices.
is the differential of fractional order
of
e. By substituting Equation (
13) into (
12), the dynamics of tracking error is
Since
is positive definite, the dynamics of the tracking error actually only depends on
By adjusting
,
and the additional fractional order
, the required tracking performance can be achieved. Besides, the control law Equation (
13) can be rewritten as
It can be seen from Equation (
16) that the computed torque controller incorporates a feedforward and a feedback loops. In practice, the design matrices
and
may be chosen diagonal which results in a decoupled multi-variable linear system. Hence, the control system actually consists of three channels. The block diagram of each channel can be reconstructed as depicted in
Figure 4. Particularly, the reference trajectory for the third channel, which shows the contribution of the antagonistic bi-articular muscles to the motion of the robot, is the sum of the hip and knee reference values
.
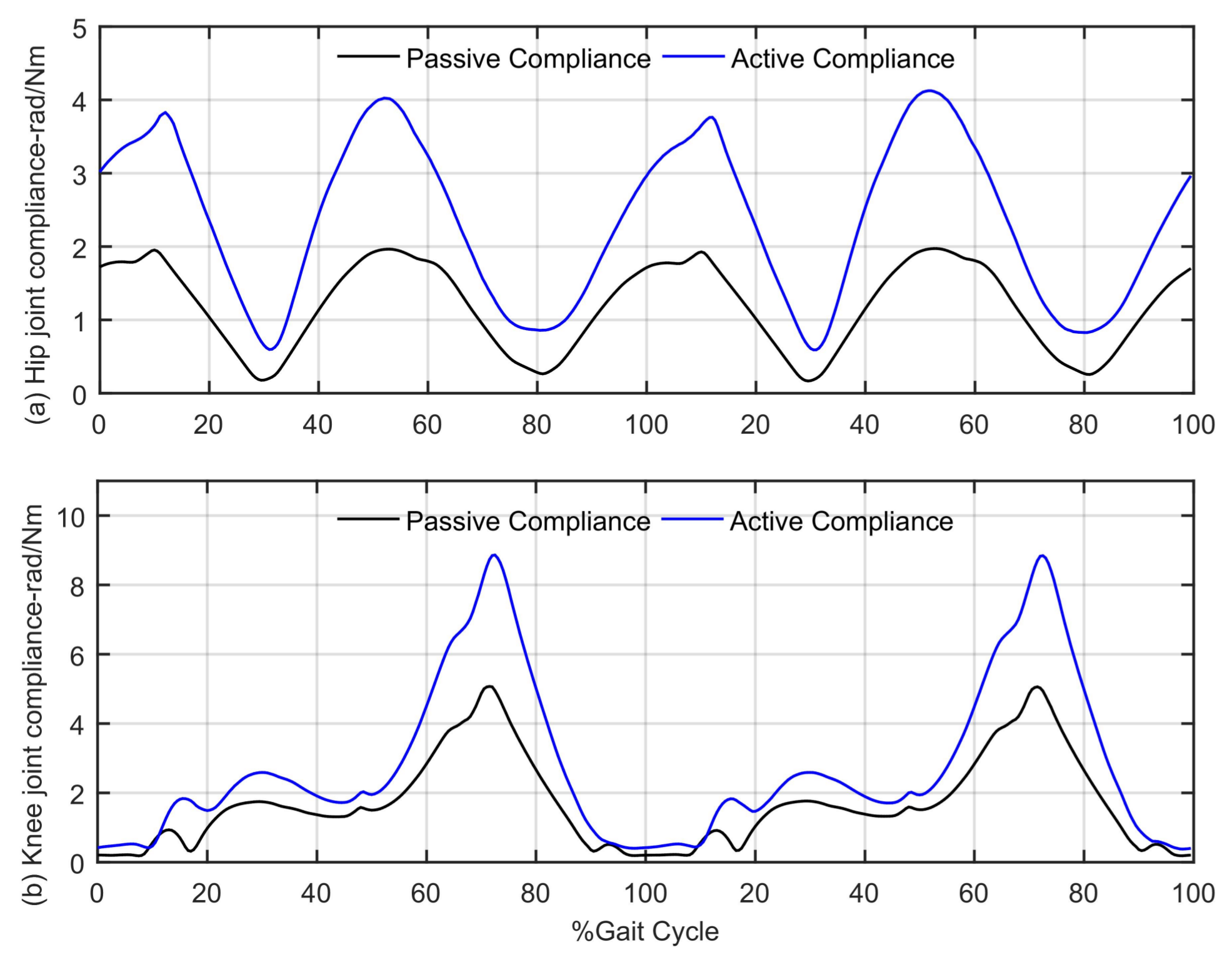
4.2. Joint Compliance Control
AAN is one of the most important requirements of the robotic rehabilitation system due to the fact that the disability level of patients not only varies from subject to subject but also changes during training process with each subject. In order to implement the AAN strategy, the disability level of the patient is needed to be estimated first. Then, the compliance of the system is changed accordingly to encourage the patient effort during training.
In this study, the relationship between joint compliance and the nominal pressure in the work by Choi et al. [
16] is employed. The compliance
of an antagonistic actuator powered by
n couple of PAMs can be described by
in which
and
are the parameters of the spring element of the couple of PAMs which drive actuator
j, respectively. These parameters of the developed system are provided in
Table 3. The length of anterior PAM corresponding to joint angle
is
. Note that
and
are regulated by the trajectory tracking controller while
is fixed since it decides the initial position of the actuator. Therefore, the nominal pressure
dominates the compliance of the actuators.
For estimation of the disability level, a new strategy is proposed as follows.
Define the human-robot interactive torque (HRIT) as
in which
are active torques represent the contributions of subjects to the movement of the robotic orthosis. The HRIT is measured by using bar-shaped load cells attached on thigh and shank as shown in
Figure 5a. If the effort of subjects is trivial, i.e.,
, the signals provided by the load cells represent the HRIT of the passive mode in which the disability level of the patient is highest and the robotic orthosis provides full support to dominate the movement of the lower limb. In this case,
is saved as the torque profile of the subject as illustrated by the black line in
Figure 5b. If the subject generates active force which positively contributes to the movement (
), the signal
from load cells tends to be smaller in comparison with
(Zone A in
Figure 5b). In contrast,
increases when the active force against the movement of the robotic lower limb (
) which is illustrated by Zone B in
Figure 5b. This difference can be treated as human active torque
and is utilized to adjust the compliance of the robotic orthosis. Since
not only varies from subjects to subjects, but also changes with the same subject during the training process, the following procedure is proposed to online estimate
.
Step 1: At the beginning of the training process, the subject is asked to walk on the treadmill in passive mode with full support from the robotic orthosis. Then, the data from the load cells attached to the thigh and shank positions in 30 gait cycles (GCs) are saved as . This data is the basic profile of each subject and used during the training process.
Step 2: In this step, the subject is encouraged to move actively. The signals from the load cells in this step represent
. The active torque
generated by human effort can be estimated by
Based on the estimated
, the compliance of the robotic orthosis is adjusted by the following rule
In Equation (
20),
is the width of a boundary layer in which
is the center. In experiment
.
is the gain of the compliance controller and
is the sign function of
x:
The block diagram of the proposed control system for each channel including AAN strategy is shown in
Figure 6.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}